


Robot humanoïde intelligent parlant juste avec Arduino !
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Ce Robot - Mofiza- (nom étrange) peut VOIR, PARLER et RÉAGIR à son environnement. Avant de continuer, regardez la vidéo :
Depuis que j'ai vu faire des robots parlants, j'ai vu que les gens utilisent en fait d'autres cartes de développement plutôt qu'Arduino pour faire des robots parlants. Mais il est tout à fait possible de faire un robot humanoïde avec Arduino qui peut parler et ajouter beaucoup de servos pour le faire bouger. Commençons donc :
Mise à jour (Comment je l'ai fait) -
Étape 1 : pièces dont vous aurez besoin


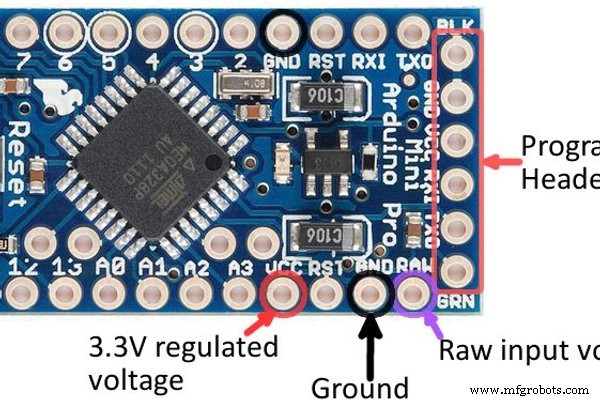
- Arduino Pro mini (5v 16 Mhz) [toute carte est bonne mais je l'ai utilisée pour la rendre petite)
- Broches d'en-tête femelles pour connexion sur circuit imprimé
- Broches d'en-tête mâles
- Planche Vero pour faire le circuit
- Module TF de la carte SD (pour le faire parler)
- carte micro sd (pas plus de 2 Go)
- 3x capteur de proximité IR
- 3x servomoteur (j'ai utilisé un micro servo sg90)
- Carton pour faire le corps
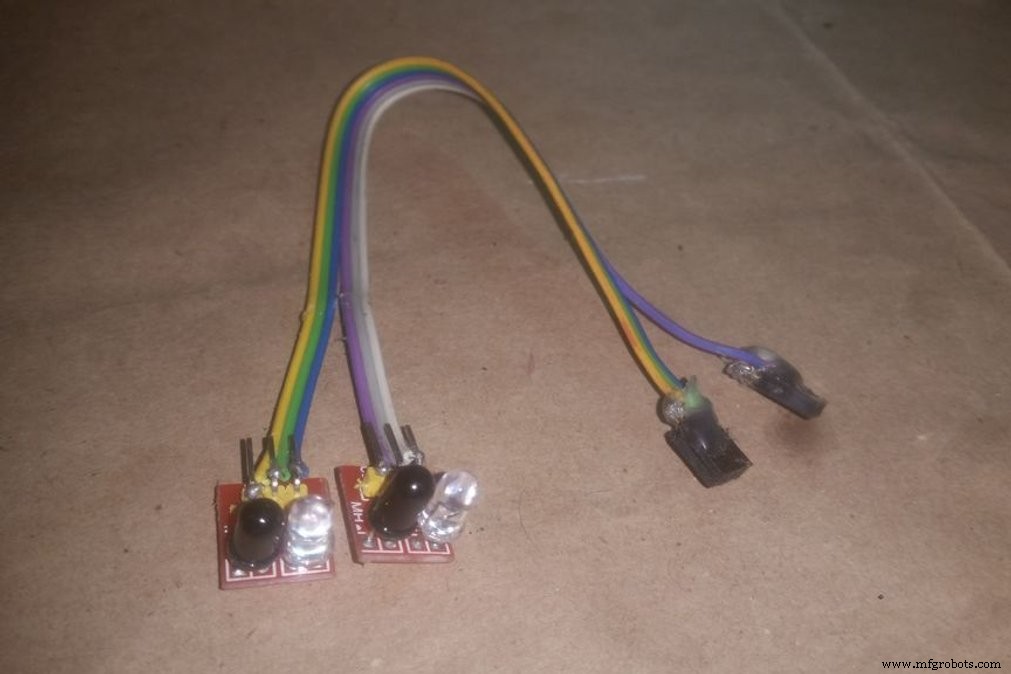
Étape 2 : Connecter le capteur IR et le corps

Faites un corps avec tout ce que vous voulez, je l'ai fait en carton. C'est assez simple.
J'ai soudé des capteurs IR avec un câble plat comme celui-ci avec un en-tête femelle à une extrémité et j'ai ajouté deux yeux sur deux et un dans la poitrine.
Le robot dira le message de bienvenue s'il détecte quelque chose dans le capteur thoracique et dira "aaaah.. ne touchez pas mon œil" si un capteur oculaire est haut. et le servo qui se trouve montera.
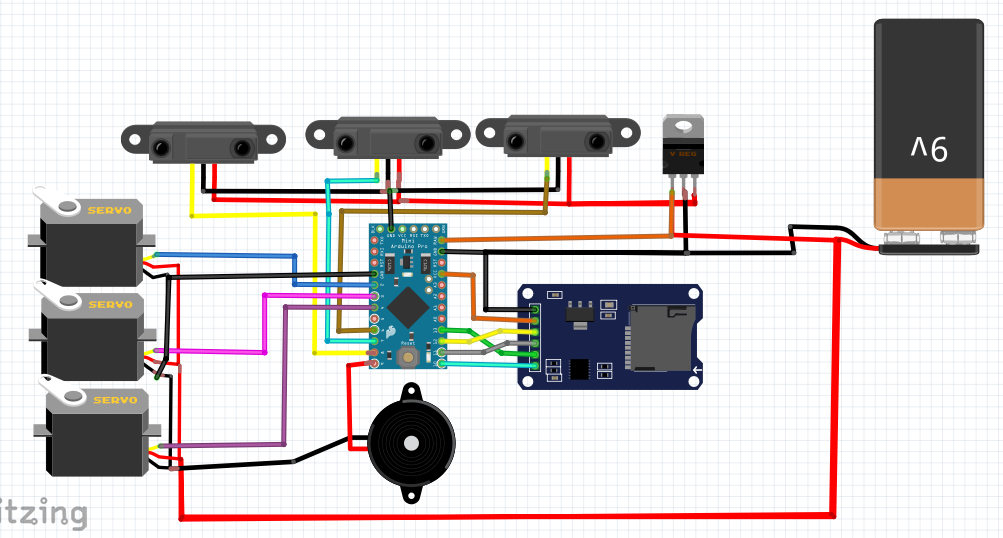
Étape 3 :Le Circuit
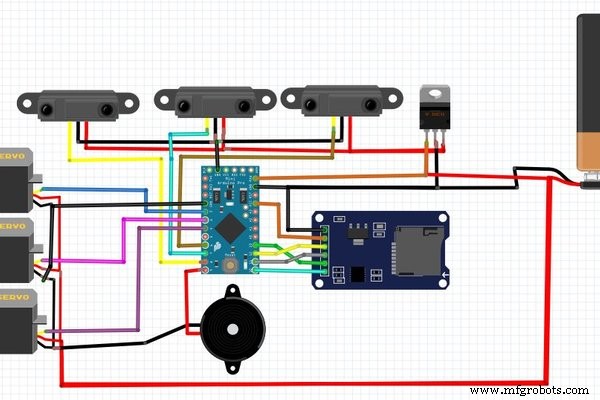
Le circuit a l'air un peu compliqué mais non c'est trop facile, vous pouvez simplement l'alimenter avec une seule batterie. soudez le circuit et tous les autres composants dans une carte vero et ajoutez un autre servo sur la tête et les mains.
Étape 4 :Coder
Avant les codes :
J'ai dû utiliser deux bibliothèques pour ce robot.
TMRpcm.h - pour lire l'audio à partir d'une carte SD - talk https://github.com/TMRh20/TMRpcm
ServoTimer2.h - évitez les conflits avec TMRpcm et exécutez les servomoteurs à l'aide de timer2 car TMRpcm utilise Timer1 sur arduino. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
C'est le code pour dire bienvenue. Vous pouvez créer votre propre environnement et votre propre code. Avant de commencer à coder, vous devrez ajouter la bibliothèque ServoTimer2. Le robot ne fonctionnera pas non plus.
Et puis en haut Le code :
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha;ServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9 ; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); retourner; }}boucle vide() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); retard (2000); lhand.write(1200); // délai de prise de contact (9000); } else { lhand.write(300); rhand.write (1700); matha.write(1500); }}
Étape 5 : Terminer
Maintenant, allumez-le et le tour est joué. Un robot intelligent a fini de fabriquer. [Je téléchargerai bientôt d'autres photos et détails]
Si je pouvais avoir plus d'épingles, je ferais marcher le robot. mais il ne me restait que 3 broches (numériques). C'est moins que ce dont j'ai besoin.
Soutenez-moi en vous abonnant à ma chaîne YouTube.
Code
- mofiza.welcome.code
mofiza.welcome.codeC/C++
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha; //matha signifie HEADServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9 ; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); retourner; }}boucle vide() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); retard (2000); lhand.write(1200); // délai de prise de contact (9000); } else { lhand.write(300); rhand.write (1700); matha.write(1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robotSchémas
Processus de fabrication
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Stores intelligents
- Contrôler l'accepteur de pièces avec Arduino
- Obstacles pour éviter le robot avec servomoteur
- Arduino avec Bluetooth pour contrôler une LED !
- Robot suiveur de ligne
- Contrôler un robot Roomba avec Arduino et un appareil Android
- Robot à commande vocale
- Contrôler le bras robotique Arduino avec l'application Android