


Visualiser le mouvement 3D du capteur IMU
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Avant de plonger dans la partie logicielle, assemblons nos kits matériels.
Qu'est-ce qu'un capteur MPU-6050 Les appareils MPU-6050 combinent un gyroscope à 3 axes et un accéléromètre à 3 axes sur la même puce de silicium, avec un processeur de mouvement numérique (DMP) intégré , qui traite les complexes 6 axesMotionFusion algorithmes. Donc, maintenant vous allez pouvoir déchiffrer la signification de 6DOF-6 degrés de liberté.
Pour plus de détails sur le schéma de connexion et la configuration matérielle, veuillez vous reporter à mon blog précédent.
Venons-en maintenant au logiciel de traitement, qui facilitera la visualisation 3D de ce capteur de mouvement.
Logiciel requis :
- ProcessingIDE
Considérant que vous avez déjà installé ArduinoIDE impliquant deux IDE distincts, vous pourriez vous sentir un peu confus. Eh bien, il n'y a pas lieu de paniquer. Suivez les étapes ci-dessous et tous vos doutes seront dissipés !
Le traitement est assez similaire à ArduinoIDE, à l'exception de quelques fonctions spécialisées. Ainsi, vous verrez une influence/similitude dans ProcessingIDE.
Les figures 1 et 2 rendront mes déclarations claires.

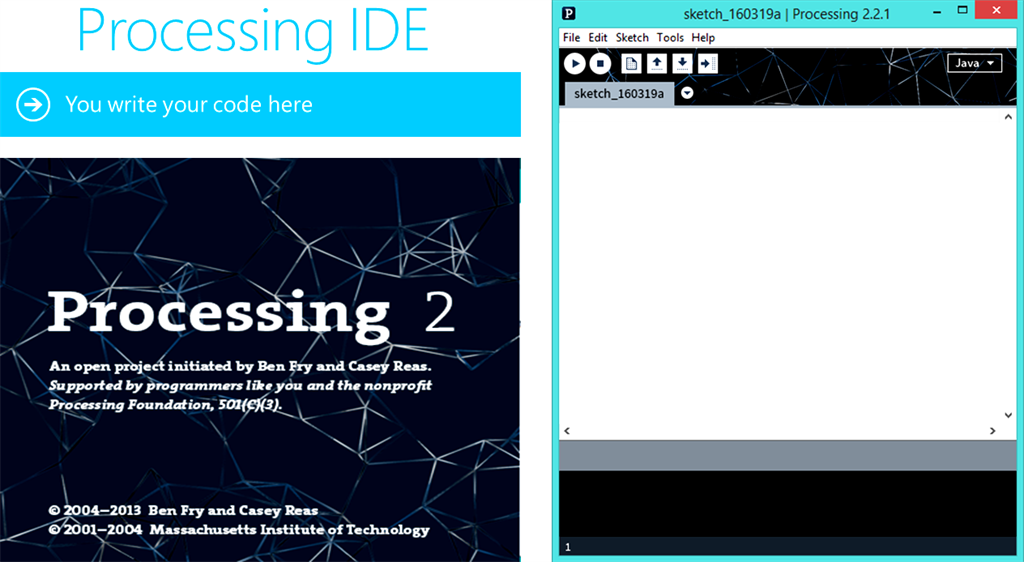
Ainsi, nous voyons qu'il y a une similitude visuelle étonnante dans ces deux IDE. Maintenant que vous avez installé l'IDE de traitement, vous devez télécharger une bibliothèque spéciale nommée "Toxi" à des fins de traitement. La localisation d'un fichier "Toxi" peut être très mouvementée sur le World Wide Web. Je vous ai donc facilité la tâche en le téléchargeant sur mon github. Cliquez sur ce lien et téléchargez le fichier nommé « toxiclibs-complete-0020 ». Ensuite, extrayez le dossier . Copiez le "toxiclibs-complete-0020" dossier et collez-le sous les "bibliothèques" dossier de traitement. Impossible de trouver "dossier bibliothèques " ? Alors, faites-en un ! Ouais. Si vous ne trouvez pas de " bibliothèques ", créez un dossier et nommez-le "bibliothèques ". Maintenant, collez votre "toxiclibs-complete-0020" dossier à l'intérieur. Après avoir correctement suivi ces étapes, exécutez l'IDE de traitement. Il est temps de coder ! Afin de visualiser la visualisation 3D, vous devez d'abord télécharger le code Arduino pour MPU-6050 (extraire le fichier .ino du dossier MPU6050_DMP6.rar). Après l'avoir fait, vous devez apporter certaines modifications comme ci-dessous. Vous devez commenter ce code qui dit :
#define OUTPUT_READABLE_YAWPITCHROLL par // #define OUTPUT_READABLE_YAWPITCHROLL
de même, décommentez le code qui dit :
//#define OUTPUT_TEAPOT par #define OUTPUT_TEAPOT
Ensuite, ouvrez l'exemple de traitement pour le MPU-6050. Allez dans la barre d'outils, cliquez sur Fichier -> Ouvrir. Ensuite, accédez au dossier dans lequel vous avez installé la bibliothèque MPU-6050 pour Arduino. Vous pouvez facilement localiser l'exemple de traitement :suivez la séquence de flux :MPU6050> Exemples> MPU6050_DMP6> Traitement> MPUTeapot. Comme vous l'avez fait dans le cas d'ArduinoIDE, également dans ce cas, vérifiez le port série qui y est défini. Maintenant, vérifiez le code. Vous verrez que par défaut, la ligne le définit pour linux/mac utilisateurs comme :
String portName = "/dev/ttyUSB1" ;
Vous devez remplacer String portName par le port sur lequel votre Arduino est connecté. Reportez-vous à la figure 3.

Pour les fenêtres utilisateurs, commentez ce code comme suit :
//String portName = "/dev/ttyUSB1" ;
De même, décommentez ce code comme suit :
//String portName ="COM15" ; par String portName ="COM15" ;
Remplacer "COM15 " avec le port COM sur lequel votre arduino est connecté (vérifiez cela en allant dans arduino et Outils -> Port série). Donc, enfin la configuration est terminée, maintenant ce n'est plus qu'une question de quelques minutes ! Téléchargez le code Arduino (MPU6050_DMP6) via Arduino.Remarque : N'OUVREZ PAS LE MONITEUR SÉRIE pendant que le processus est en cours.(Pourquoi ? car nous visualiserons le code sur ProcessingIDE au lieu d'ArduinoIDE)
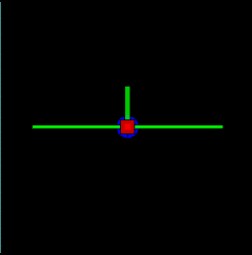
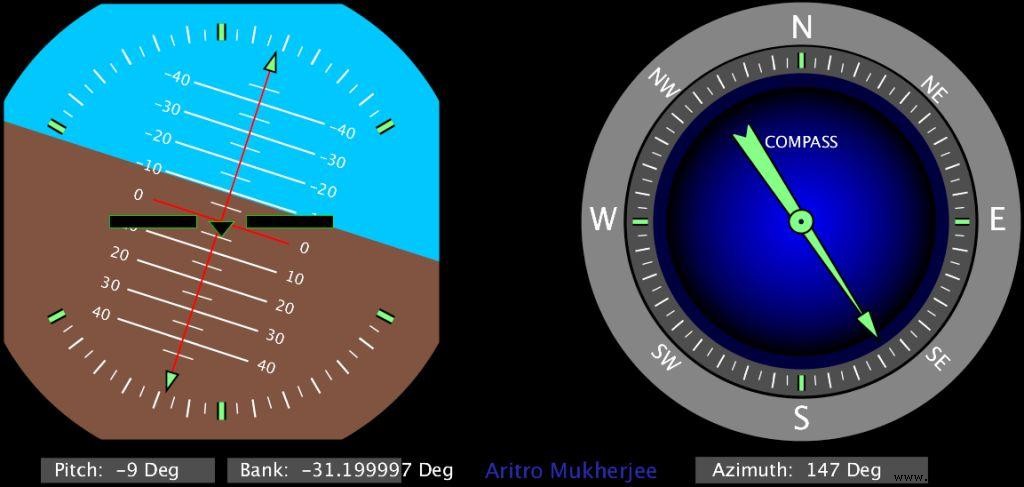
Ensuite, exécutez le code de traitement (MPUTeapot) en appuyant sur le bouton avec "play" symbole. Vous verrez un petit objet ressemblant à un avion. Attendez environ 10 à 12 secondes pour que les valeurs du MPU-6050 se stabilisent. Après quoi, vous verrez le modèle 3D se déplacer en conséquence avec le capteur MPU-6050. Reportez-vous au GIF ci-dessous. Pour une meilleure compréhension, accédez à YouTube
Concevez vos propres instruments de simulateur de vol personnalisés dans mon prochain tutoriel.
Veuillez commenter ci-dessous si vous rencontrez des problèmes concernant la configuration matérielle/logicielle.
Code
Code de projet complet
Téléchargez ce dossier et suivez les instructions qui ont été spécifiées dans ce tutoriel.https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zipSchémas
Suivez mon article de blog précédent pour un didacticiel pas à pas sur la configuration d'un capteur IMU (MPU-6050) avec un Arduino. Lien (https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066)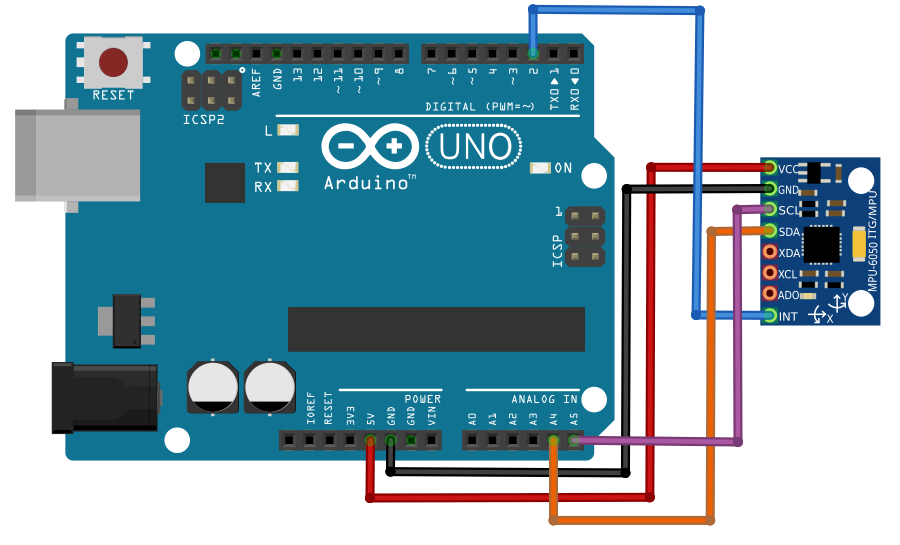
Processus de fabrication
- Logic-X lance une nouvelle marque de produits de traitement des capteurs COTS
- Computer Vision comme capteur de mouvement pour SmartThings
- Capteur de mouvement, alarme, enregistrement vidéo en HA sur Raspberry Pi
- Système de capteur de mouvement infrarouge DIY pour Raspberry Pi
- Capteur de mouvement utilisant Raspberry Pi
- Capteur de température Raspberry Pi
- Raspberry Pi GPIO avec capteur de mouvement PIR :meilleur tutoriel
- Interfaçage du capteur de mouvement PIR HC-SR501 avec Raspberry Pi
- Capteur d'émotion/EEG