


Qu'est-ce que le pilote cycloïdal ? Conception, impression 3D et tests
Dans ce didacticiel, nous apprendrons ce qu'est l'entraînement cycloïdal, comment cela fonctionne, expliquerons comment concevoir notre propre modèle et en imprimer un en 3D afin que nous puissions le voir en direct et mieux comprendre comment cela fonctionne.
Vous pouvez regarder la vidéo suivante ou lire le didacticiel écrit ci-dessous.
Un entraînement cycloïdal est un type unique de réducteur de vitesse qui offre un rapport de réduction très élevé avec une conception compacte mais robuste. Comparé aux entraînements à engrenages conventionnels, comme les engrenages droits et planétaires, il peut atteindre des rapports de réduction beaucoup plus élevés allant jusqu'à 10 fois dans le même espace ou étage. En plus de cela, il présente un jeu pratiquement nul, une capacité de charge plus élevée, une rigidité et une efficacité élevée pouvant atteindre 90 %. Ces propriétés rendent les entraînements cycloïdaux adaptés à de nombreuses applications où la précision et les performances de positionnement sont importantes telles que la robotique, les machines-outils, les équipements de fabrication, etc.
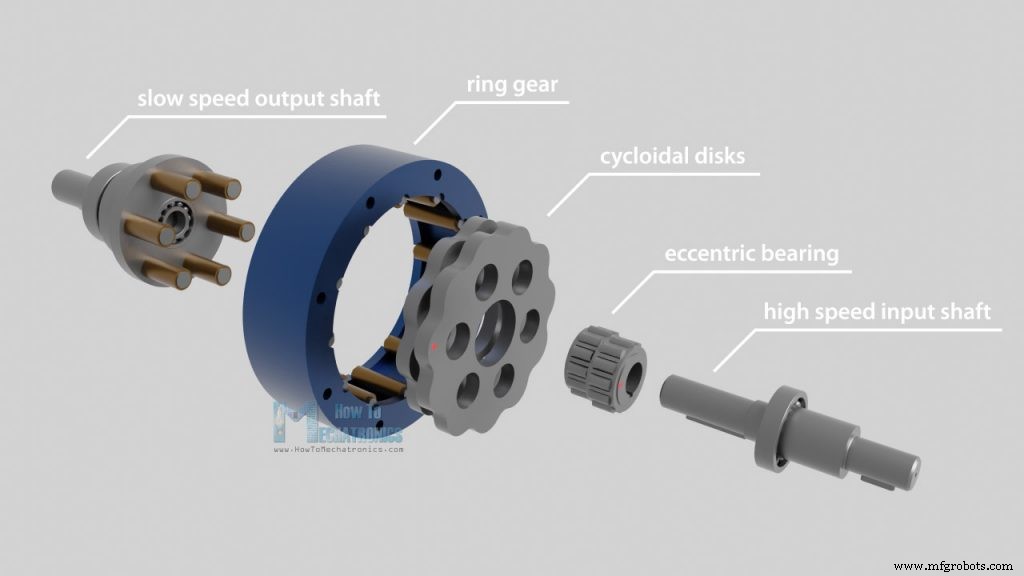
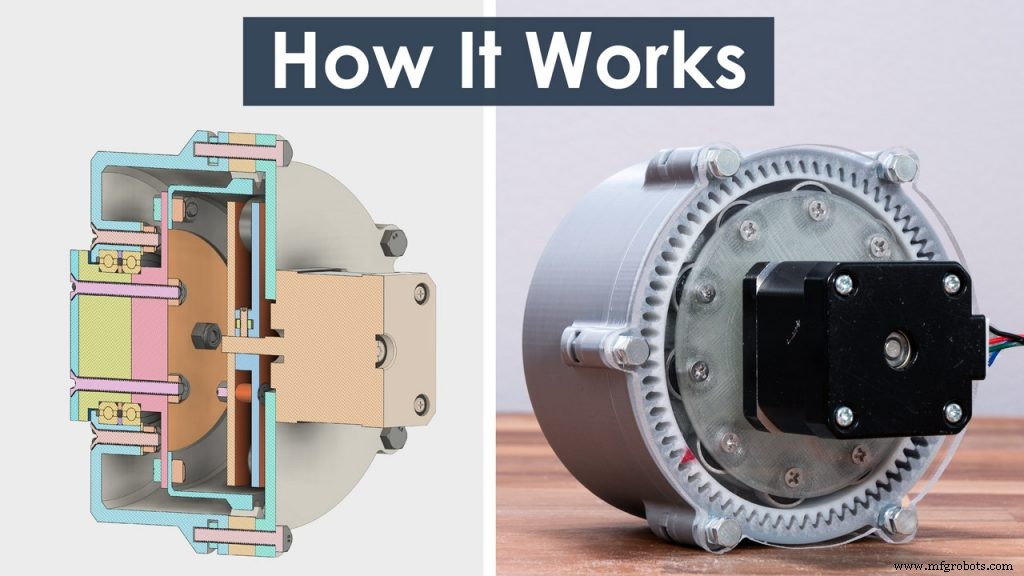
Voyons maintenant ce qu'il y a à l'intérieur et comment fonctionne un entraînement cycloïdal. Un entraînement cycloïdal est composé de cinq composants principaux, un arbre d'entrée à grande vitesse, un roulement excentrique ou une came cycloïdale, deux disques cycloïdaux ou suiveurs de came, une couronne dentée avec broches et rouleaux et un arbre de sortie à vitesse lente avec broches et rouleaux.
L'arbre d'entrée entraîne le roulement excentrique, et le roulement excentrique entraîne les disques cycloïdaux autour de la circonférence interne du logement de la couronne dentée. Le mouvement excentrique fait que les dents ou les lobes des disques cycloïdaux s'engagent avec les rouleaux du carter de la couronne dentée de manière à produire une rotation inverse à une vitesse réduite.
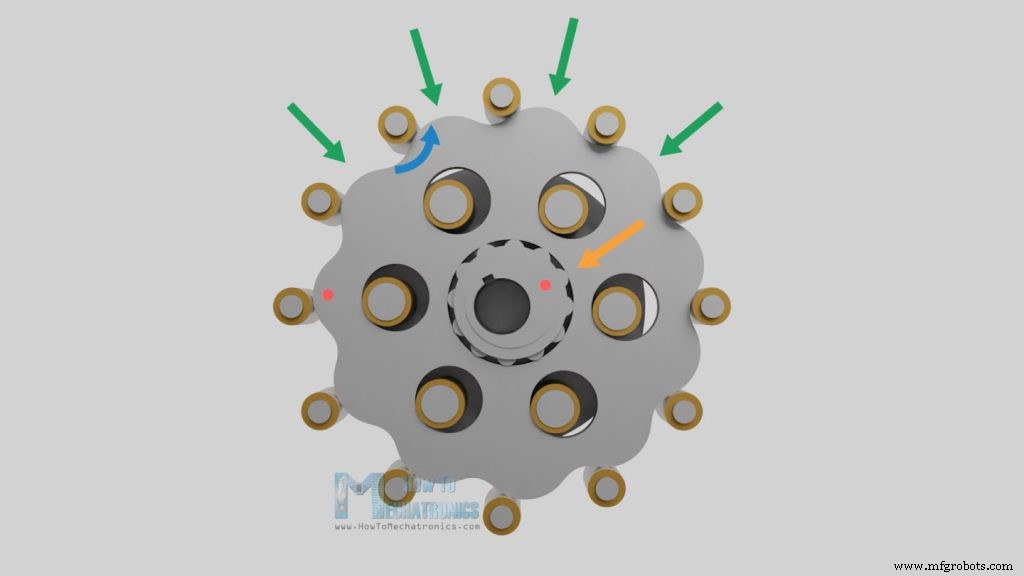
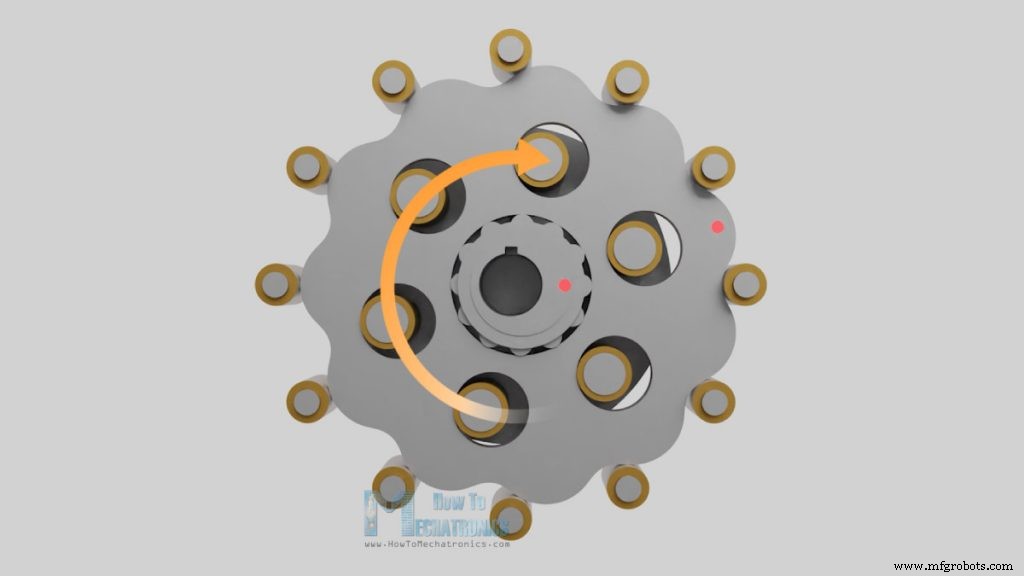
Nous pouvons regarder de plus près ici et voir que le roulement excentrique pousse en fait le disque cycloïdal contre les rouleaux de la couronne.
En raison de la forme unique du disque et de sa position par rapport aux rouleaux de la couronne, nous pouvons voir qu'à mesure que le roulement excentrique progresse, les lobes du disque devant la rotation ne pourront pas passer ou sauter le prochain rouleau de la couronne, mais au lieu de cela, il glissera ou roulera vers l'arrière. Ce comportement est ce qui provoque réellement la rotation inverse des disques.
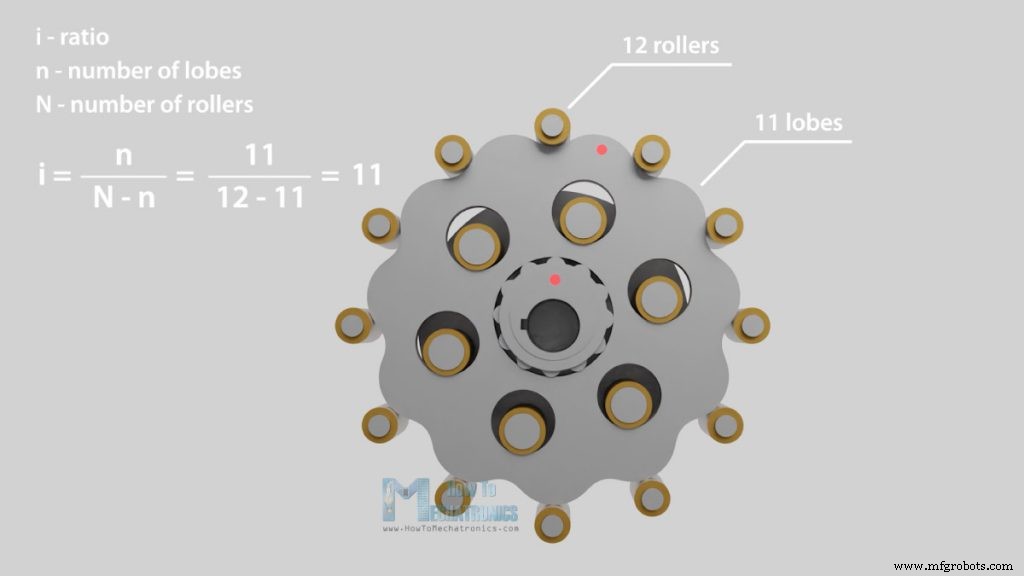
En général, il y a un lobe cycloïdal de moins sur le disque par rapport au nombre de goupilles sur le carter de la couronne dentée. Cela fait que, pour une rotation complète du palier excentrique, le disque cycloïdal ne se déplace que d'une distance d'un lobe. De cela, nous pouvons voir que le rapport de réduction dépend uniquement du nombre de goupilles de la couronne dentée.
Par exemple, nous avons ici 12 broches sur la couronne dentée, ce qui signifie 11 lobes sur le disque cycloïdal, et c'est un rapport de 11:1, soit une vitesse de sortie 11 fois plus lente. La taille des disques, des galets de la couronne ou du roulement excentrique n'affecte en rien le rapport de réduction.
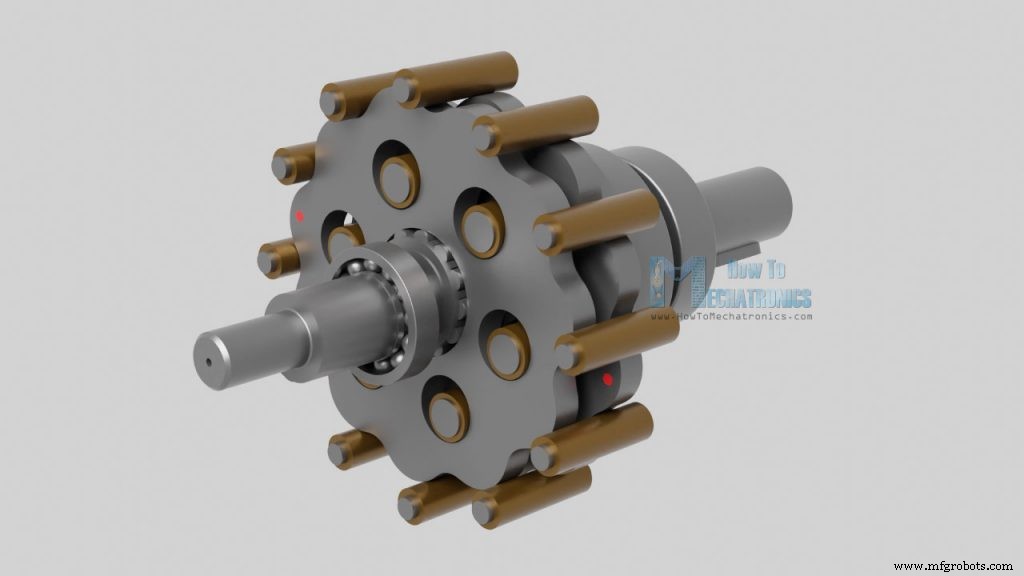
La rotation réduite est transmise aux goupilles de l'arbre de sortie à travers les trous des disques cycloïdaux.
Il y a deux disques cycloïdaux, placés à 180 degrés hors phase afin de compenser les forces de déséquilibre causées par le mouvement excentrique et de fournir un fonctionnement plus fluide à des vitesses plus élevées.
Le nom de lecteur cycloïdal vient du profil du disque qui à son tour provient d'un cycloïde, mais plus à ce sujet dans la prochaine section de la vidéo où nous allons concevoir notre propre lecteur cycloïdal.
Donc, maintenant que nous savons comment fonctionne un entraînement cycloïdal, nous pouvons passer à la conception de notre propre modèle que nous pourrons imprimer en 3D. Si nous essayons d'imprimer en 3D cet exemple de démonstration, cela pourrait fonctionner, mais cela échouerait rapidement car le matériau d'impression 3D n'est pas assez solide pour résister aux forces et aux frottements qui apparaissent dans la boîte de vitesses.
Les pièces critiques sont les rouleaux qui sont généralement des bagues, ce qui est une excellente option si les matériaux sont en métal, mais avec un matériau PLA, nous devrons utiliser des roulements à billes à la place.
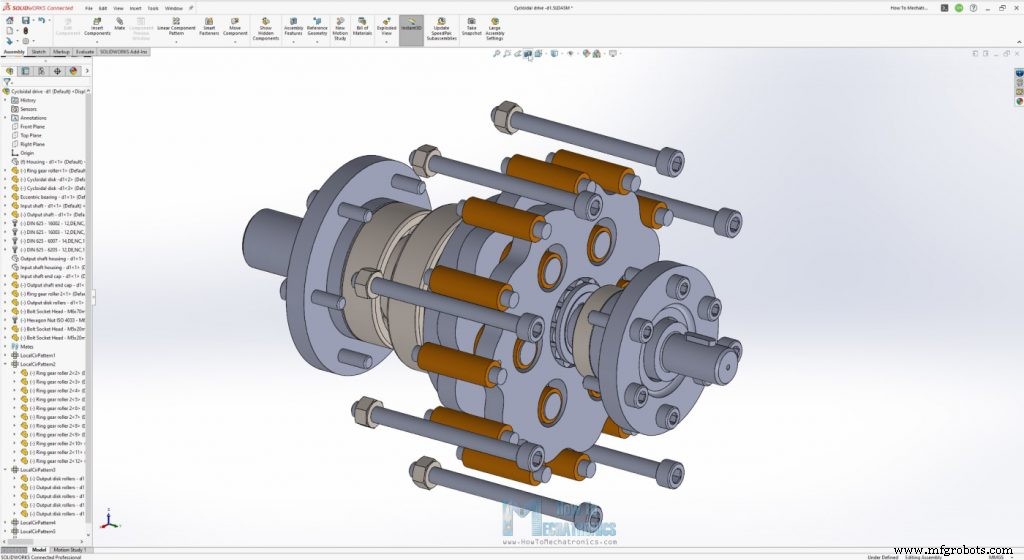
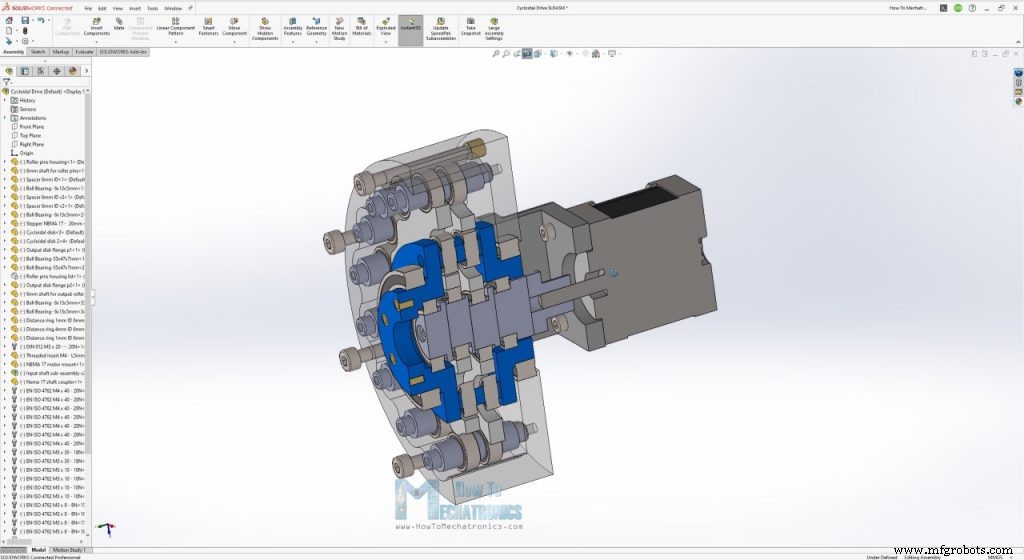
Dans cet esprit, voici l'entraînement cycloïdal que j'ai conçu et qui utilise des roulements à billes pour les rouleaux.
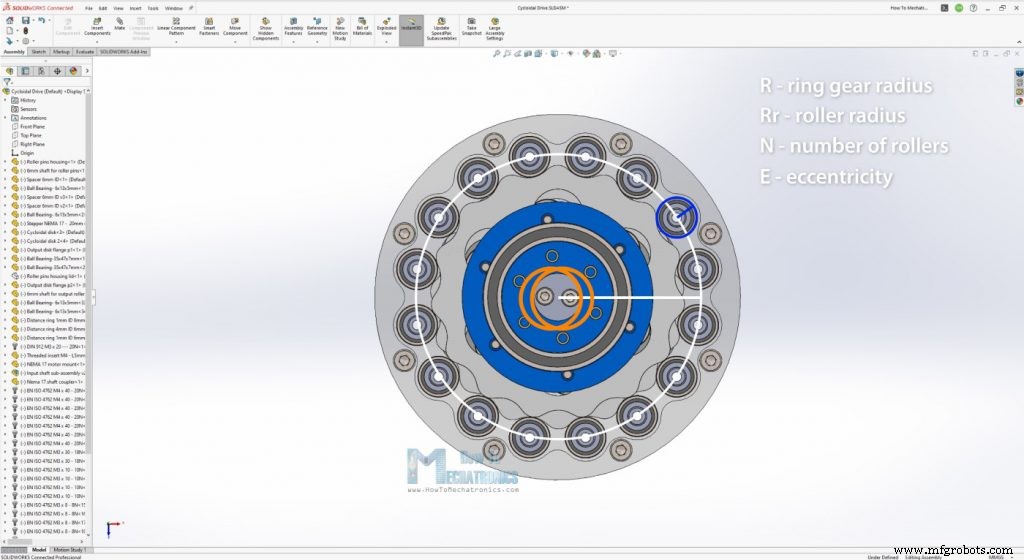
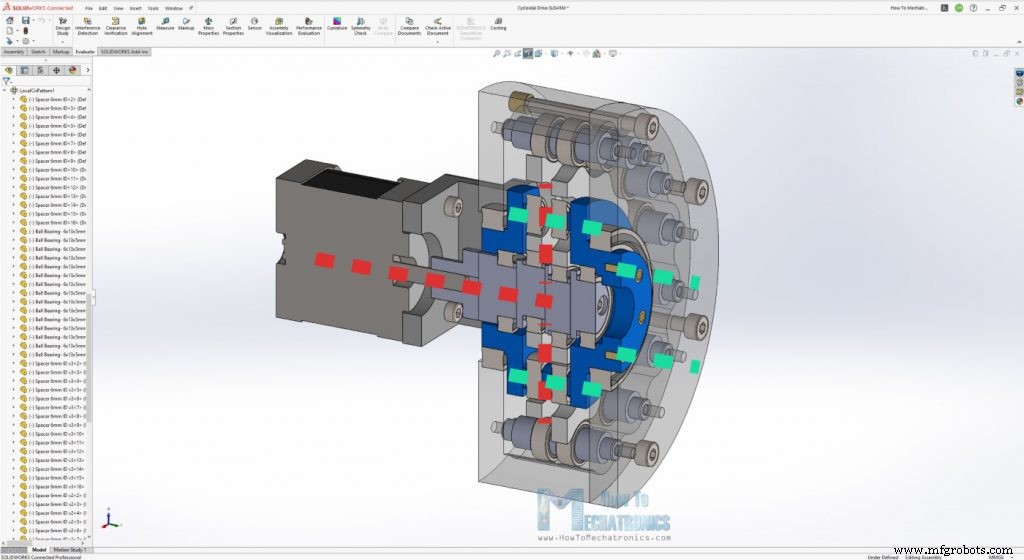
Lors de la conception d'un entraînement cycloïdal, quatre paramètres d'entrée principaux définissent la taille et la forme des disques cycloïdaux, à savoir le rayon de la couronne dentée, le rayon de ses rouleaux, le nombre de ces rouleaux et l'excentricité.
Voici l'entraînement cycloïdal que j'ai conçu avec SOLIDWORKS et qui utilise des roulements à billes pour les rouleaux.
À ce stade, permettez-moi de remercier SOLIDWORKS d'avoir parrainé ce projet. Avez-vous entendu parler de 3DEXPERIENCE World ? un événement annuel organisé par SOLIDWORKS ?
3DEXPERIENCE World 2022 rassemble une communauté dynamique de designers, d'ingénieurs, d'entrepreneurs et de fabricants pour apprendre, se rencontrer et partager des connaissances sur les dernières technologies et les meilleures pratiques.
Assurez-vous de vous inscrire dès aujourd'hui sur SOLIDWORKS.COM/3DXW22_HOWTOMECH , et assistez virtuellement gratuitement.
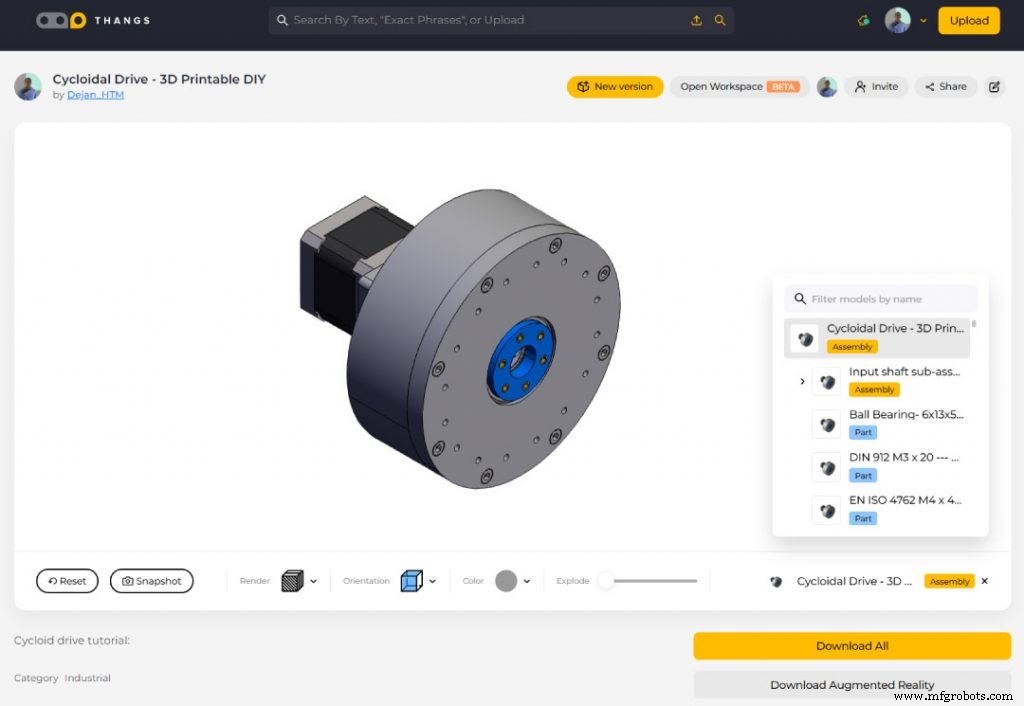
Néanmoins, vous pouvez trouver et télécharger ce modèle 3D sous forme de fichier STEP, ainsi que l'explorer dans votre navigateur sur Thang :
Vous pouvez télécharger le fichier .STEP du modèle 3D à partir de Thangs.
Merci Thang d'avoir soutenu ce tutoriel.
Quant aux fichiers STL qui servent à l'impression 3D des pièces, vous pouvez les télécharger ici :
Projet connexe
Qu'est-ce que Strain Wave Gear alias Harmonic Drive ? Un ensemble d'engrenages parfait pour les applications robotiques ! ?
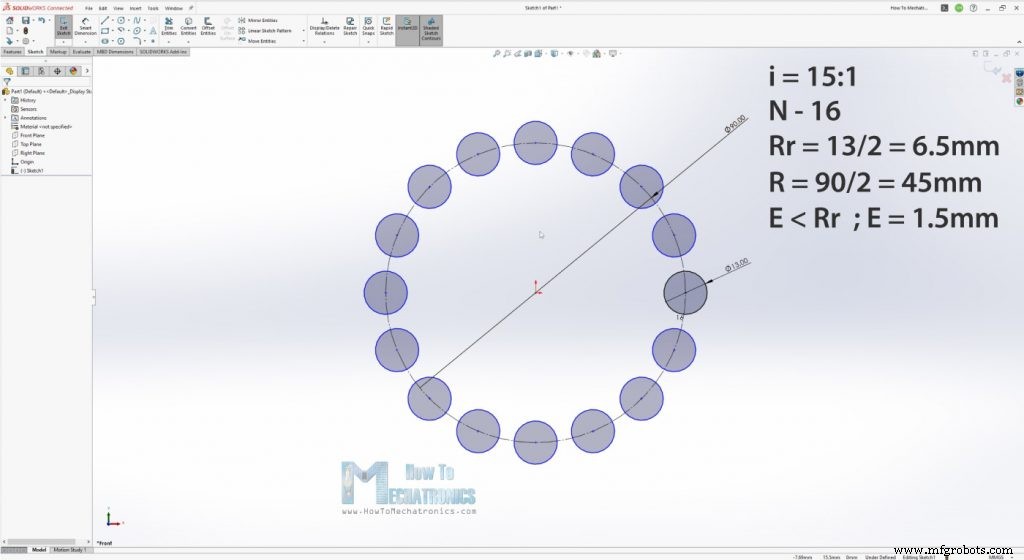
La première chose que j'ai définie était que je voulais un rapport de réduction de 15:1 pour cette boîte de vitesses, ce qui signifiait que j'avais besoin de 16 rouleaux de couronne. Donc, je dessine un croquis dans SOLIDWORKS avec 16 rouleaux autour d'un cercle.
Ensuite, j'ai choisi d'utiliser des roulements pour les rouleaux avec un diamètre extérieur de 13 mm. Maintenant, en fonction de ces deux paramètres, j'ai pu définir quelle taille devait être le diamètre primitif de la couronne. Je l'ai mis à 90 mm. La valeur d'excentricité doit être inférieure à la moitié du diamètre du rouleau, et j'ai choisi une valeur de 1,5 mm.
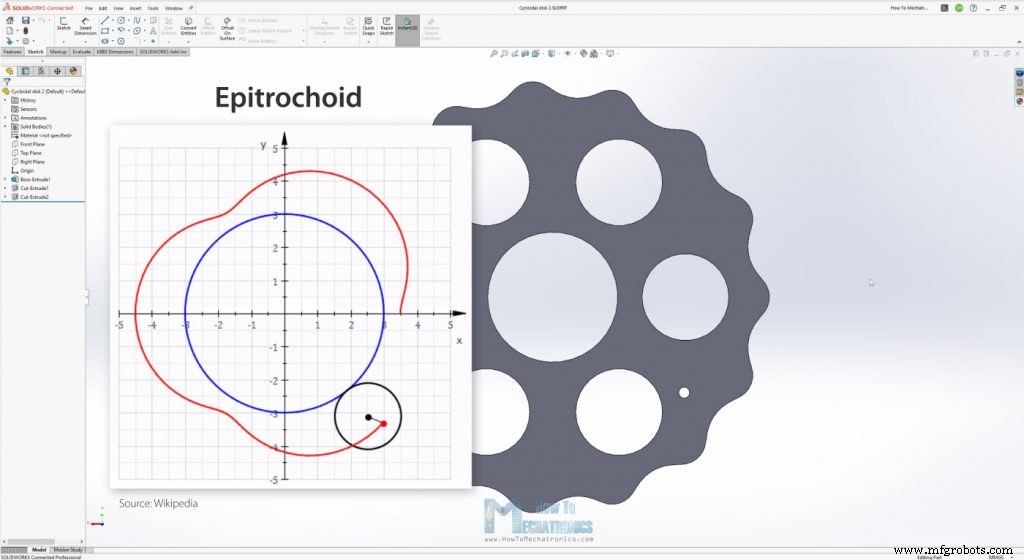
Maintenant que nous avons les quatre principaux paramètres d'entrée, nous pouvons dessiner la forme ou le profil du disque cycloïdal. Comme je l'ai mentionné, le profil du disque provient d'une cycloïde, qui est une courbe tracée par un point sur un cercle lorsqu'il roule le long d'une ligne droite sans glisser, ou sa variation, une épicycloïde qui est tracée lorsqu'il roule sur une circonférence d'un cercle .
Il existe une autre variante appelée Epitrochoid, où le point de traçage est à distance du centre du cercle extérieur et c'est sur quoi le profil du disque cycloïdal est réellement basé.
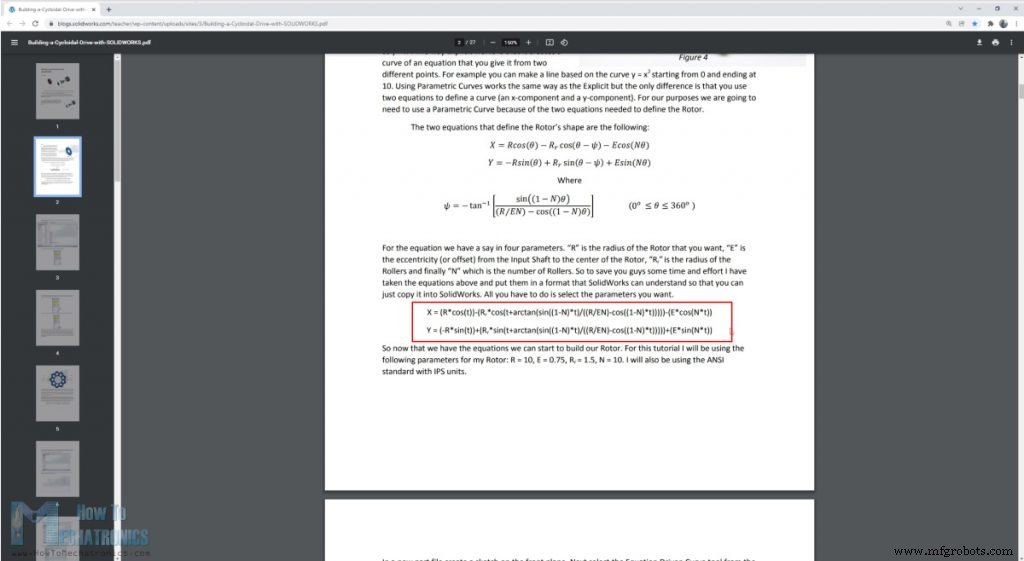
Pour tracer une telle courbe, nous pouvons utiliser ici ces équations paramétriques mais il y a aussi d'autres paramètres à y inclure, comme le diamètre du rouleau et l'excentricité. Cela complique un peu les choses, mais heureusement, il y avait un excellent document écrit par Omar Younis pour le blog SOLIDWORKS Education, où il combine tous ces paramètres dans des équations paramétriques X et Y uniques.
Voici les équations :
Maintenant, pour générer le profil, nous pouvons simplement utiliser l'outil Equations Driven Curve de SOLIDWORKS, insérer les deux équations de manière appropriée et cela générera le profil de disque cycloïdal. Bien sûr, pour les paramètres d'entrée, nous devons insérer nos valeurs.
Notez également que la courbe ne sera pas générée si les paramètres « t » sont compris entre 0 et 2*pi ou 360 degrés. Nous devons donc définir le paramètre t2 un peu en deçà de 2 * pi, puis générer la courbe avec un petit écart que nous pouvons connecter à l'aide d'une simple spline.
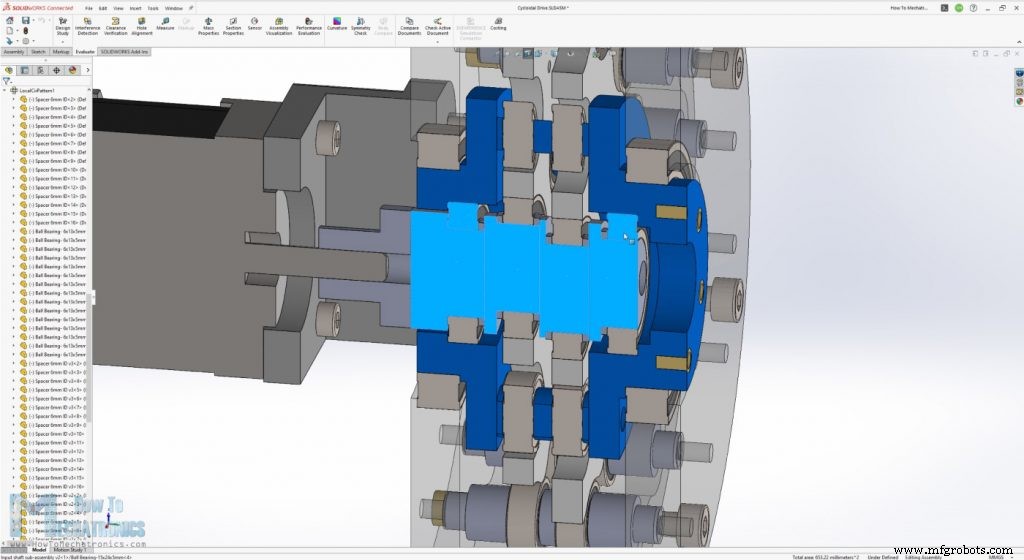
Maintenant que nous avons défini les principaux paramètres de notre entraînement cycloïdal, le reste consiste simplement à trouver des solutions techniques pour savoir comment tout sera connecté. Encore une fois, étant donné que nous utilisons un matériau d'impression 3D pas si solide, j'ai conçu les arbres des rouleaux pour qu'ils soient soutenus des deux côtés, ainsi que l'arbre d'entrée et l'arbre de sortie.
L'arbre d'entrée est composé de plusieurs sections et supporté par deux roulements à l'intérieur de l'arbre de sortie. L'arbre de sortie est également supporté par deux roulements à l'intérieur du boîtier.
Donc, pour résumer le travail de cette boîte de vitesses, l'entrée du moteur est transmise à l'arbre d'entrée excentrique qui entraîne les disques cycloïdaux autour de la couronne dentée.
Le mouvement inverse produit qui est transmis à l'arbre de sortie par les rouleaux de l'arbre de sortie. Et c'est tout, maintenant imprimons-le en 3D et voyons comment cela fonctionne dans la vraie vie.
Lors de l'impression 3D des pièces, il est important d'utiliser la fonction d'expansion horizontale du trou dans votre logiciel de tranchage.
Habituellement, les trous des pièces imprimées en 3D sont plus petits que la taille d'origine, donc avec cette fonctionnalité, nous pouvons composer cela et obtenir une dimension précise, ce qui est très important pour ces pièces. J'ai réglé le mien sur 0,07 mm, et l'expansion horizontale peut également compenser les dimensions extérieures des pièces, à 0,02 mm. Bien sûr, vous devriez faire quelques tests d'impression pour voir quelles valeurs vous donneront les meilleurs résultats sur votre imprimante 3D.
Voici donc toutes les pièces imprimées en 3D, ainsi que les roulements et les boulons nécessaires au montage de la transmission cycloïdale.
Voici une liste de tous les composants nécessaires pour assembler ce lecteur cycloïdal :
J'ai commencé par insérer les broches de la couronne dentée dans le boîtier. Ces goupilles accueillent les rouleaux ou les roulements de la couronne dentée mais elles ne mesurent que 6 mm de diamètre. Je n'étais pas sûr qu'ils soient assez solides pour ne pas casser sous la charge du disque cycloïdal.
Par conséquent, je les ai faites creuses et j'y ai inséré des tiges métalliques de 3 mm que j'avais posées autour. De cette façon, les broches seront suffisamment solides à coup sûr. Bien sûr, il existe des solutions plus intelligentes pour cela. Par exemple, nous pourrions utiliser des boulons M6 à la place, mais ce que je n'aime pas, c'est que les boulons M6 sont légèrement inférieurs à 6 mm, de sorte que le roulement vacillerait. Idéalement, nous pourrions utiliser ici des tiges appropriées de 6 mm, qui sont en fait facilement disponibles à l'achat même avec cette taille particulière de 35 mm.
Une fois que nous avons mis toutes les goupilles en place, nous pouvons insérer les roulements dans cet ordre, un anneau de distance de 7 mm, un roulement, puis un anneau de distance de 3 mm, un roulement et un autre anneau de distance de 7 mm.
L'entraînement cycloïdal devrait maintenant tenir dans cette couronne que nous avons créée, et si nous essayons de faire tourner le disque avec un mouvement excentrique, en poussant sur les côtés tout en tournant, le disque devrait commencer à tourner en sens inverse.
Ensuite, nous pouvons assembler l'arbre d'entrée qui est composé de quatre sections. Dans chaque section, nous devons placer un roulement et des bagues d'écartement, et en raison de l'excentricité, nous ne pourrons pas le faire à moins que l'arbre ne soit fabriqué en sections.
Pour relier les sections ensemble, j'utilise deux boulons M3 qui les traversent tous. Nous pouvons noter ici que les trous de ces boulons M3 sont légèrement plus petits que les boulons M3 afin que le boulon y fasse un filetage et soit plus serré.
Voici à quoi devrait ressembler l'arbre une fois assemblé, mais j'ai dû insérer les disques cycloïdaux ainsi que maintenant je ne pouvais pas le faire. Donc, je l'ai démonté et remonté avec le disque inséré également.
J'ai continué avec l'assemblage de l'arbre de sortie. Ici, nous devons installer les rouleaux de sortie ou les roulements, et nous le faisons de la même manière que pour les rouleaux de la couronne dentée. Une goupille de 6 mm, avec des roulements de 13 mm et des bagues d'écartement insérées dans des boulons M3 de 20 mm de long.
Lors de l'insertion de ces rouleaux de sortie à travers les ouvertures du disque cycloïdal, il est important de positionner les deux disques l'un par rapport à l'autre à 180 degrés de déphasage. Pour aider à cela, j'ai fait de petits trous sur les deux disques déphasés de 180 degrés, donc ici nous n'avons qu'à les faire correspondre et nous sommes bons pour insérer les rouleaux à travers.
Veuillez noter qu'il s'agit d'un ajustement un peu serré, mais si les dimensions du trou sont exactes, nous pourrons faire l'ajustement.
Nous pouvons maintenant fixer ces goupilles à l'autre bride de l'autre côté, mais à cette fin, nous devons d'abord installer des inserts filetés dans la bride. J'utilise ces inserts filetés pour que l'ensemble soit plus compact.
Ainsi, une fois l'arbre d'entrée et l'arbre de sortie assemblés, nous pouvons installer tout cet ensemble dans le boîtier via un roulement de 47 mm de diamètre extérieur.
Ensuite, nous pouvons installer un autre roulement comme celui-ci à l'avant de l'arbre et insérer le couvercle du boîtier en place. C'est également un ajustement serré car les 16 broches doivent tenir dans les fentes du couvercle du boîtier, nous devons donc utiliser un peu de force pour l'insérer.
À l'arrière du boîtier, j'ai installé des inserts filetés M4, puis j'ai fixé le couvercle et le boîtier avec des boulons M4 de 40 mm.
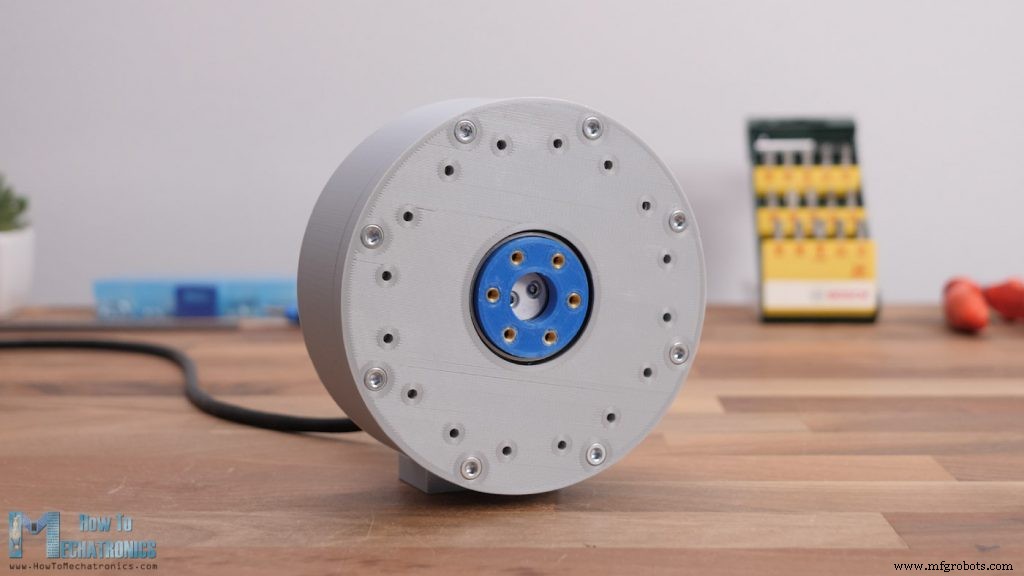
Et c'est tout! S'il est juste de le dire, jetez un coup d'œil à cette beauté. J'aime vraiment la façon dont cette boîte de vitesses cycloïdale s'est avérée, un design épuré sans rien en sortir.
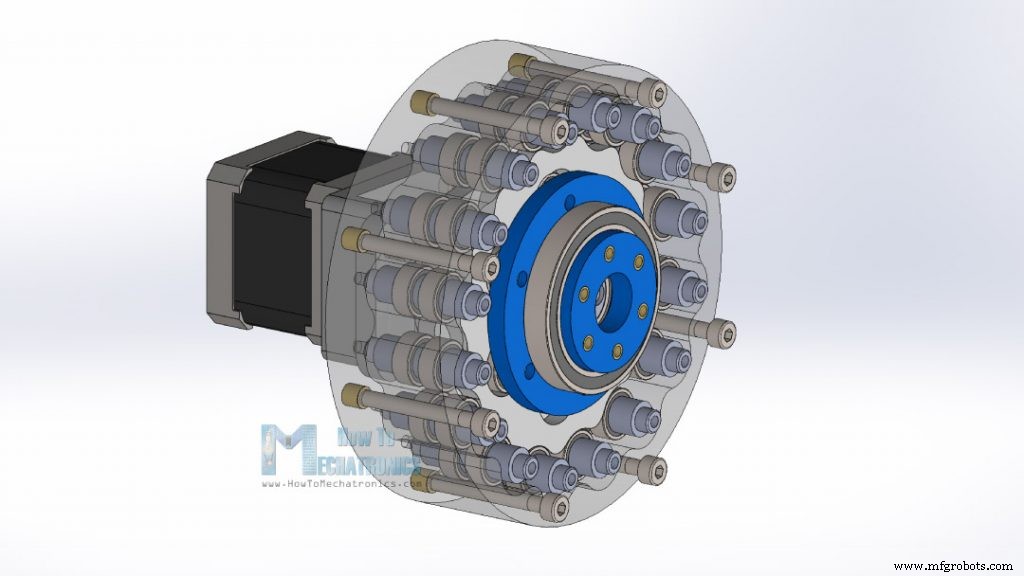
Néanmoins, attachons-y maintenant un moteur et voyons comment cela fonctionnera. À l'arrière de l'arbre d'entrée, j'ai installé quelques inserts filetés supplémentaires afin que nous puissions facilement fixer divers coupleurs d'arbre.
Pour tester la boîte de vitesses, j'utiliserai un moteur pas à pas NEMA 17, j'ai donc attaché un coupleur d'arbre imprimé en 3D approprié à l'arbre d'entrée. J'ai fixé le stepper à un support de montage imprimé en 3D, inséré l'arbre du moteur dans le coupleur et fixé le support de montage au boîtier.
Une dernière chose est d'installer des inserts filetés à l'avant de l'arbre de sortie afin que nous puissions y attacher des choses. Voici l'apparence finale de cet entraînement cycloïdal, en combinaison avec un moteur pas à pas NEMA 17, mais bien sûr, nous pouvons utiliser n'importe quel autre type de moteur ici.
Et là, nous l'avons. Pour être honnête, j'ai été vraiment surpris de la douceur de la sortie de cette boîte de vitesses. De face, nous pouvons voir l'arbre d'entrée et l'arbre de sortie tourner en même temps, dans le sens opposé et avec une différence de vitesse de 15:1.
J'ai également pu faire fonctionner la boîte de vitesses sans le capot avant, et nous pouvons donc voir tout ce qui a été expliqué précédemment en action.
Le mouvement est tout simplement fascinant.
À la fin, j'ai fait quelques tests pour vérifier les performances de la boîte de vitesses. Une autre chose à noter ici est que cet entraînement cycloïdal est également rétro-pilotable, ce qui peut être une bonne fonctionnalité à avoir pour certaines applications.
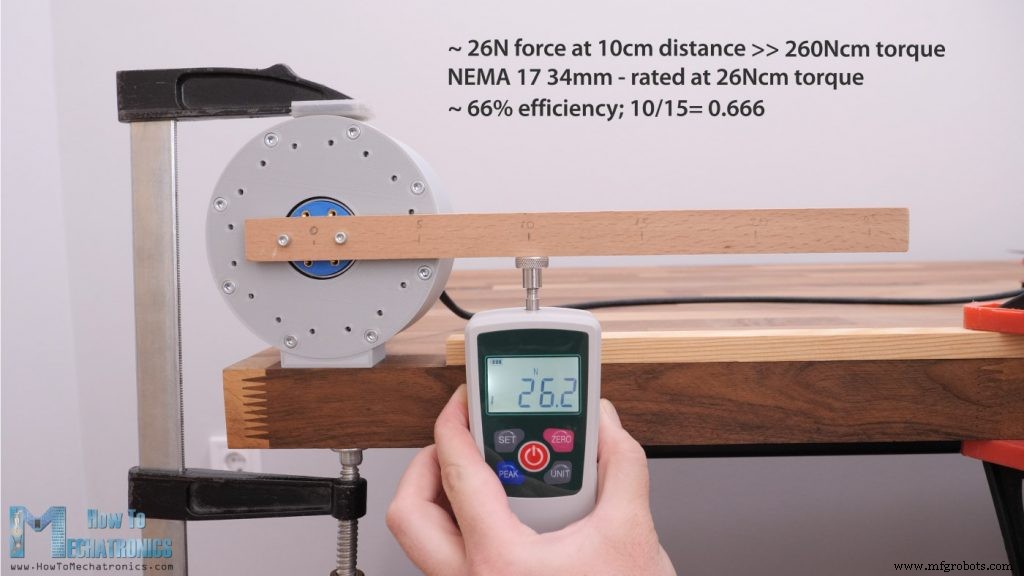
Donc, ici, je mesure la force que cette boîte de vitesses peut produire à une distance de 10 cm. J'ai obtenu une lecture d'environ 26 N, qui se traduit par un couple, soit environ 260 Ncm, et ce stepper NEMA 17 qui ne mesure que 34 mm de long est évalué à 26 Ncm.
Cela signifie que nous avons une augmentation de couple d'environ 10 fois avec l'entraînement cycloïdal. C'est une efficacité d'environ 66%, étant donné que le rapport de réduction est de 15:1 et dans des conditions idéales, nous devrions avoir 15 fois plus de couple. Néanmoins, c'est toujours un excellent résultat étant donné que tout est imprimé en 3D avec une imprimante 3D économique et que les pièces ne sont pas aussi précises que nous l'obtiendrions avec certaines imprimantes professionnelles ou machines CNC dans le cas d'une boîte de vitesses entièrement métallique.
J'ai également fait des tests de précision, qui ont également montré de bons résultats.
J'utiliserais certainement ce type de boîte de vitesses dans de futures vidéos lors de la réalisation de projets robotiques.
J'espère que cette vidéo vous a plu et que vous avez appris quelque chose de nouveau. Si vous avez des questions, n'hésitez pas à les poser dans la section des commentaires ci-dessous.Qu'est-ce que l'entraînement cycloïdal ?
Comment concevoir un entraînement cycloïdal
Modèle 3D d'entraînement cycloïdal DIY
Conception
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)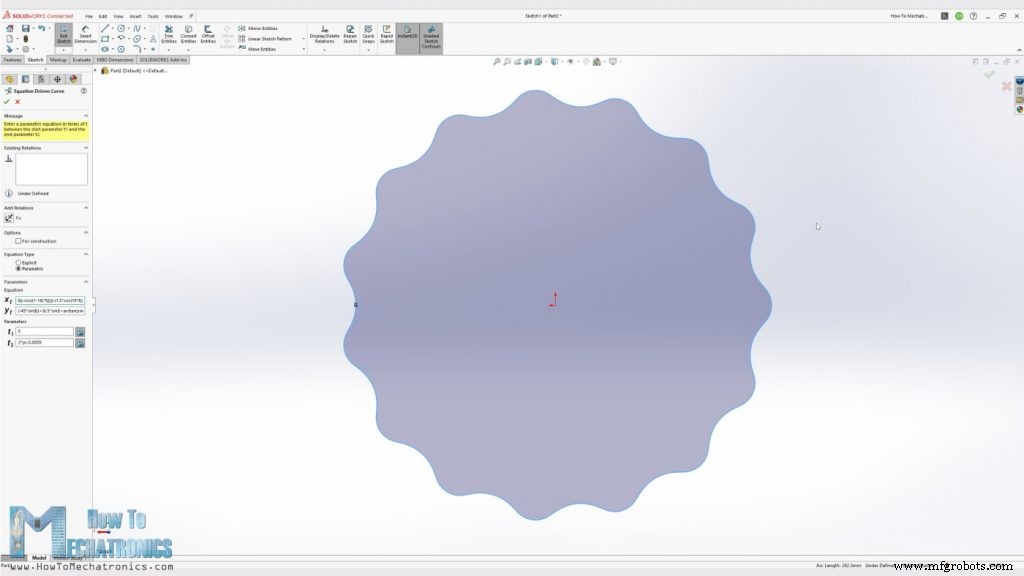
Impression 3D

Assemblage de la boîte de vitesses cycloïdale













Test de l'entraînement cycloïdal




Technologie industrielle
- Qu'est-ce que l'impression 3D multi-matériaux ?
- Qu'est-ce que le Robocasting dans l'impression 3D ?
- Qu'est-ce que la sonnerie dans l'impression 3D ?
- Qu'est-ce qu'un marché d'impression 3D ?
- Qu'est-ce que la bioimpression ?
- Test et fonctionnalité de la CNC, de l'impression 3D et de la fabrication de prototypes hybrides
- Qu'est-ce que l'impression 3D ? - Types et comment ça marche
- Qu'est-ce qu'un test de radiographie ? - Types et avantages
- Impression 3D :quels sont ses impacts sur l'usinage et la conception industrielle ?