


Moteurs Selsyn (Synchro)
Normalement, les enroulements du rotor d'un moteur à induction à rotor bobiné sont court-circuités après le démarrage. Lors du démarrage, une résistance peut être placée en série avec les enroulements du rotor pour limiter le courant de démarrage. Si ces enroulements sont connectés à une résistance de démarrage commune, les deux rotors resteront synchronisés pendant le démarrage.
Ceci est utile pour les presses à imprimer et les ponts-levis, où deux moteurs doivent être synchronisés lors du démarrage. Une fois démarré, et les rotors sont en court-circuit, le couple de synchronisation est absent. Plus la résistance au démarrage est élevée, plus le couple de synchronisation pour une paire de moteurs est élevé.
Si les résistances de démarrage sont supprimées, mais que les rotors sont toujours en parallèle, il n'y a pas de couple de démarrage. Cependant, il existe un couple de synchronisation important. C'est ce qu'on appelle un selsyn , qui est l'abréviation de « auto-synchrone ».
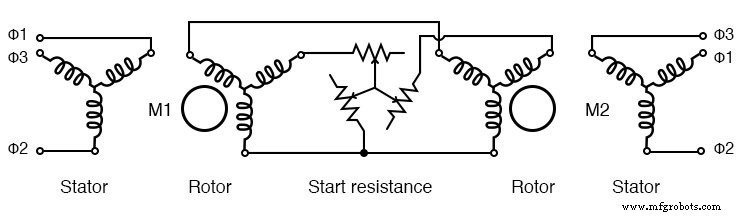
Démarrage des moteurs à induction à rotor bobiné à partir de résistances communes
Les rotors peuvent être fixes. Si un rotor est déplacé d'un angle , l'autre arbre selsyn se déplacera d'un angle θ. Si la traînée est appliquée à un selsyn, cela sera ressenti lors de la tentative de rotation de l'autre arbre.
Bien qu'il existe des selsyn multi-chevaux (multi-kilowatts), l'application principale est de petites unités de quelques watts pour les applications d'instrumentation - indication de position à distance.
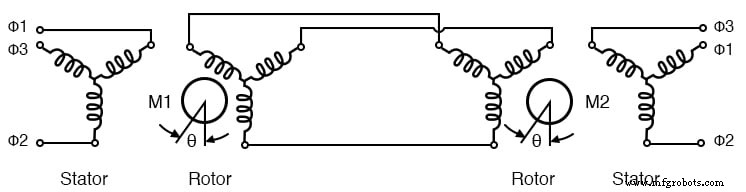
Selsyns sans résistance de départ
Les selsyns d'instrumentation n'ont aucune utilité pour les résistances de démarrage (figure ci-dessus). Ils ne sont pas destinés à être auto-rotatifs. Étant donné que les rotors ne sont pas court-circuités ni chargés de résistance, aucun couple de démarrage n'est développé.
Cependant, la rotation manuelle d'un arbre produira un déséquilibre dans les courants du rotor jusqu'à ce que l'arbre de l'unité parallèle suive. Notez qu'une source commune d'alimentation triphasée est appliquée aux deux stators. Bien que nous montrons des rotors triphasés ci-dessus, un rotor alimenté en monophasé est suffisant, comme le montre la figure ci-dessous.
Émetteur - Récepteur
Selsyns de petite instrumentation, également connus sous le nom de synchros , utilise des rotors monophasés parallèles alimentés en courant alternatif, conservant les stators triphasés en parallèle, qui ne sont pas alimentés en externe. Ci-dessous, les synchros fonctionnent comme des transformateurs rotatifs.
Si les rotors du transmetteur de couple (TX) et récepteur de couple (RX) sont au même angle, les phases des tensions statoriques induites seront identiques pour les deux, et aucun courant ne circulera.
Si un rotor est déplacé par rapport à l'autre, les tensions de phase du stator différeront entre l'émetteur et le récepteur. Le courant du stator circulera en développant le couple. L'arbre récepteur est esclave électriquement de l'arbre émetteur. L'arbre de l'émetteur ou du récepteur peut être tourné pour faire tourner l'unité opposée.
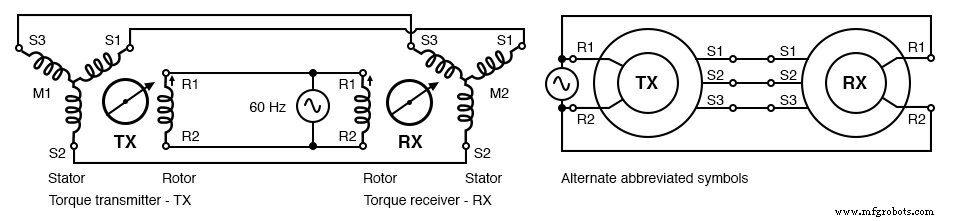
Les synchros ont des rotors alimentés en monophasé
Les stators de synchro sont enroulés avec des enroulements triphasés amenés vers des bornes externes. L'enroulement à rotor unique d'un émetteur ou d'un récepteur de couple est mis en évidence par des bagues collectrices brossées. Les émetteurs et récepteurs synchro sont électriquement identiques.
Cependant, un récepteur synchro a un amortissement inertiel intégré. Un émetteur de couple synchro peut être remplacé par un récepteur de couple.
La détection de position à distance est la principale application de synchronisation. Par exemple, un émetteur synchro couplé à une antenne radar indique la position de l'antenne sur un indicateur dans une salle de contrôle.
Un émetteur synchro couplé à une girouette indique la direction du vent sur une console distante. Les synchros sont disponibles pour une utilisation avec une alimentation 240 Vca 50 Hz, 115 Vca 60 Hz, 115 Vca 400 Hz et 26 Vca 400 Hz.
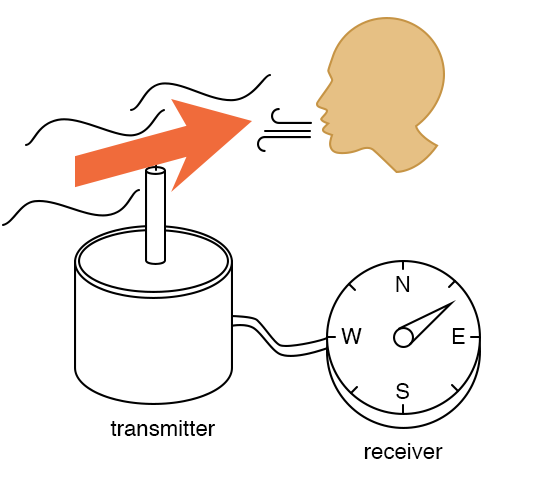
Application synchro :indication de position à distance
Émetteur-récepteur différentiel
Un émetteur différentiel synchro (TDX) a à la fois un rotor et un stator triphasés. Un émetteur synchro différentiel ajoute une entrée d'angle d'arbre à une entrée d'angle électrique sur les entrées de rotor, produisant la somme sur les sorties de stator.
Cet angle électrique du stator peut être affiché en l'envoyant à un RX. Par exemple, un récepteur synchro affiche la position d'une antenne radar par rapport à la proue d'un navire. L'ajout du cap compas d'un navire par un émetteur synchro différentiel affiche la position de l'antenne sur un RX par rapport au nord géographique, quel que soit le cap du navire.
L'inversion de la paire de fils de stator S1-S3 entre un TX et un TDX soustrait les positions angulaires.
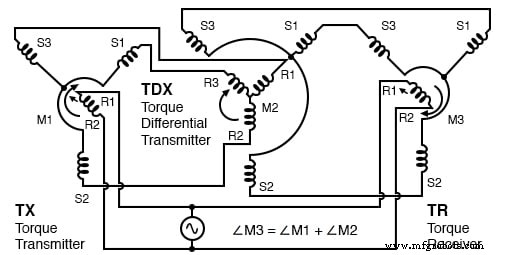
Émetteur différentiel de couple (TDX)
Une antenne radar de bord couplée à un émetteur synchro code l'angle de l'antenne par rapport à la proue du navire (figure ci-dessous). Il est souhaité d'afficher la position de l'antenne par rapport au nord géographique.
Nous devons ajouter les navires se dirigeant d'un gyrocompas à la position de l'antenne par rapport à la proue pour afficher l'angle de l'antenne par rapport au nord géographique (∠antenna + ∠gyro).
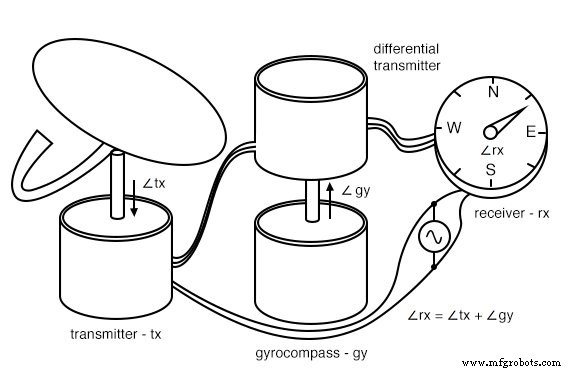
Application transmetteur différentiel de couple :addition angulaire
∠antenne-N =∠antenne + ∠gyroscope ∠rx =∠tx + ∠gy
Par exemple, le cap du navire est ∠30°, la position de l'antenne par rapport à la proue du navire est ∠0°, antenna-N est :
∠rx =∠tx + ∠gy ∠30° =∠30° + ∠0°
Exemple, le cap du navire est 30°, la position de l'antenne par rapport à la proue du navire est ∠15°, antenna-N est :
∠45° =∠30° + ∠15°
Addition vs Soustraction
Pour référence, nous montrons les schémas de câblage pour la soustraction et l'ajout d'angles d'arbre en utilisant à la fois les TDX (émetteur différentiel de couple) et les TDR (récepteur différentiel de couple). Le TDX a une entrée d'angle de couple sur l'arbre, une entrée d'angle électrique sur les trois connexions du stator et une sortie d'angle électrique sur les connexions des trois rotors.
Le TDR a des entrées d'angle électriques sur le stator et le rotor. L'angle de sortie est un couple sur l'arbre TDR. La différence entre un TDX et un TDR est que le TDX est un transmetteur de couple et le TDR un récepteur de couple.
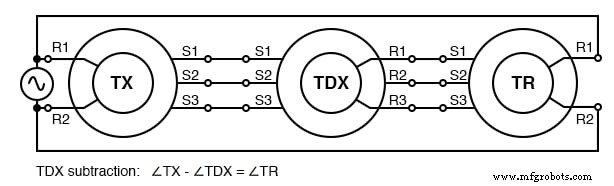
Soustraction TDX
Les entrées de couple sont TX et TDX. La différence angulaire de sortie de couple est TR.
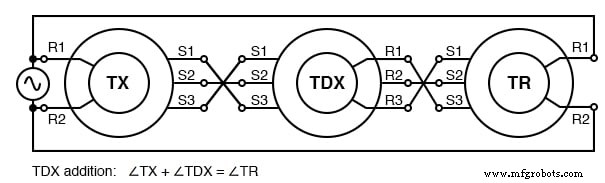
Ajout TDX
Les entrées de couple sont TX et TDX. La somme angulaire de sortie de couple est TR.
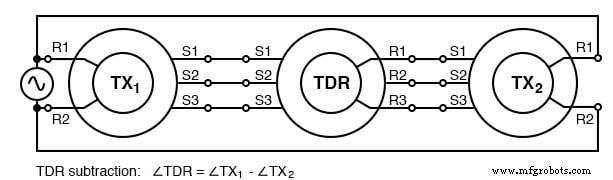
Soustraction TDR
Les entrées de couple sont TX1 et TX2 . La différence angulaire de sortie de couple est TDR.
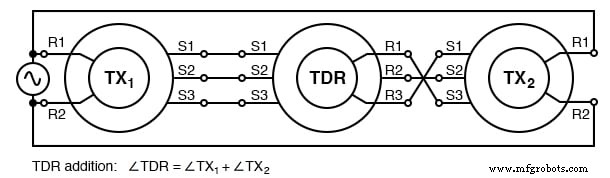
Ajout TDR
Les entrées de couple sont TX1 et TX2 . La somme angulaire de sortie de couple est TDR.
Transformateur de contrôle
Une variante de l'émetteur synchro est le transformateur de contrôle . Il a trois enroulements de stator également espacés comme un TX. Son rotor est enroulé avec plus de tours qu'un émetteur ou un récepteur pour le rendre plus sensible à la détection d'un zéro lorsqu'il est tourné, généralement, par un servo système.
La sortie rotorique du CT (Control Transformer) est nulle lorsqu'elle est orientée à angle droit par rapport au vecteur champ magnétique du stator. Contrairement à un TX ou un RX, le CT ne transmet ni ne reçoit de couple. C'est simplement un détecteur de position angulaire sensible.
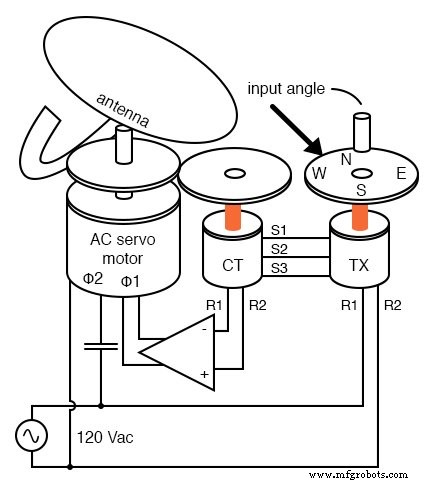
Le transformateur de contrôle (CT) détecte le servo null
Dans la figure ci-dessus, l'arbre du TX est réglé à la position souhaitée de l'antenne radar. Le système d'asservissement entraînera le servomoteur à entraîner l'antenne dans la position commandée. Le CT compare la position commandée à la position réelle et signale au servo amplificateur d'entraîner le moteur jusqu'à ce que l'angle commandé soit atteint.
Le servo utilise CT pour détecter la position nulle de l'antenne
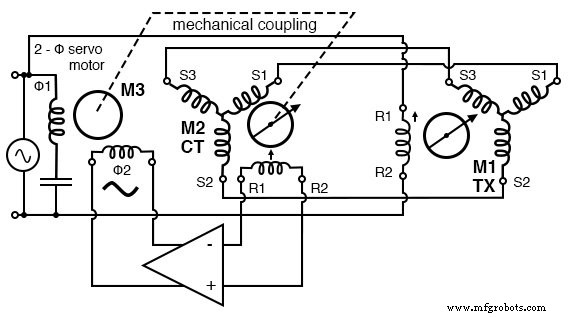
Lorsque le rotor du transformateur de commande détecte un zéro à 90° à l'axe du champ statorique, il n'y a pas de sortie rotorique. Tout déplacement du rotor produit une tension d'erreur AC proportionnelle au déplacement.
Un servo cherche à minimiser l'erreur entre une variable commandée et mesurée due à une rétroaction négative. Le transformateur de commande compare l'angle de l'arbre à l'angle du champ magnétique du stator, envoyé par le stator TX.
Lorsqu'il mesure un minimum ou nul, le servo a entraîné l'antenne et le rotor du transformateur de commande à la position commandée. Il n'y a pas d'erreur entre la position mesurée et la position commandée, pas de sortie TC à amplifier.
Le servomoteur , un moteur biphasé, s'arrête de tourner. Cependant, toute erreur détectée par CT entraîne l'amplificateur qui entraîne le moteur jusqu'à ce que l'erreur soit minimisée. Cela correspond au système d'asservissement ayant entraîné le CT couplé à l'antenne pour correspondre à l'angle commandé par le TX.
Le servomoteur peut entraîner un train d'engrenages réducteurs et être volumineux par rapport aux synchros TX et CT. Cependant, le faible rendement des servomoteurs à courant alternatif les limite à des charges plus faibles. Ils sont également difficiles à contrôler car ce sont des appareils à vitesse constante.
Cependant, ils peuvent être contrôlés dans une certaine mesure en faisant varier la tension sur une phase avec la tension de ligne sur l'autre phase. Les charges lourdes sont entraînées plus efficacement par de gros servomoteurs à courant continu.
Les applications aéroportées utilisent des composants à 400 Hz – TX, CT et servomoteur. La taille et le poids des composants magnétiques AC sont inversement proportionnels à la fréquence. Par conséquent, l'utilisation de composants 400 Hz pour les applications aéronautiques, comme les surfaces de contrôle mobiles, permet d'économiser de la taille et du poids.
Résolveur
Un résolveur (figure ci-dessous) a deux enroulements statoriques placés à 90° l'un à l'autre, et un seul enroulement de rotor entraîné par un courant alternatif. Un résolveur est utilisé pour la conversion polaire en rectangulaire. Une entrée angulaire au niveau de l'arbre du rotor produit des tensions proportionnelles sinθ et cosθ de coordonnées rectangulaires sur les enroulements du stator.
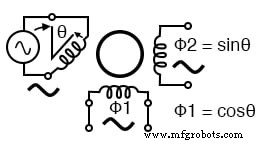
Le résolveur convertit l'angle de l'arbre en sinus et cosinus de l'angle
Par exemple, une boîte noire dans un radar code la distance jusqu'à une cible sous la forme d'une tension proportionnelle à onde sinusoïdale V, avec l'angle de relèvement comme angle d'arbre. Convertir en coordonnées X et Y. L'onde sinusoïdale est transmise au rotor d'un résolveur. L'arbre de renvoi d'angle est couplé à l'arbre du résolveur. Les coordonnées (X, Y) sont disponibles sur les bobines du stator du résolveur :
X=V(cos(∠roulement)) Y=V(sin(∠roulement))
Les coordonnées cartésiennes (X, Y) peuvent être tracées sur un affichage cartographique. Un TX (transmetteur de couple) peut être adapté pour servir de résolveur.

Scott-T convertit 3-φ en 2-φ permettant à TX d'effectuer la fonction de résolveur
Il est possible de dériver des composants angulaires en quadrature de type résolveur à partir d'un émetteur synchro en utilisant un Scott-T transformateur. Les trois sorties TX, triphasées, sont traitées par un Scott-T transformateur en une paire de composants en quadrature. Il existe également une version linéaire du résolveur appelée inductosyn. La version rotative de l'inductosyn a une résolution plus fine qu'un résolveur.
Résumé : moteurs Selsyn (synchro)
- Une synchronisation , également connu sous le nom de selsyn , est un transformateur rotatif utilisé pour transmettre le couple de l'arbre.
- Un TX, transmetteur de couple , accepte une entrée de couple sur son arbre pour une transmission sur des sorties électriques triphasées.
- Un RX, récepteur de couple , accepte une représentation électrique triphasée d'une entrée angulaire pour la conversion en une sortie de couple au niveau de son arbre. Ainsi, TX transmet un couple d'un arbre d'entrée à un arbre de sortie RX distant.
- Un TDX, transmetteur différentiel de couple , additionne une entrée d'angle électrique avec une entrée d'angle d'arbre produisant une sortie d'angle électrique
- Un TDR, récepteur différentiel de couple, additionne deux entrées d'angle électrique produisant une sortie d'angle d'arbre
- Un TC, transformateur de contrôle , détecte un zéro lorsque le rotor est positionné à angle droit par rapport à l'entrée d'angle du stator. Un CT est généralement un composant d'un système d'asservissement.
- Un résolveur génère une représentation sin(θ) et cos(θ) en quadrature de l'entrée d'angle d'arbre au lieu d'une sortie triphasée.
- La sortie triphasée d'un TX est convertie en sortie de style résolveur par un transformateur Scott-T .
Technologie industrielle
- Moteurs à collecteur AC
- Conseil technique :Moteurs
- Entraînements et moteurs dans les bancs d'essai automobiles
- Avantages des moteurs refroidis par liquide
- Balais de carbone dans les moteurs à courant continu :utilisations, défauts courants et plus
- Sécurité des moteurs électriques :différentes phases et mesures de sécurité
- 7 étapes pour assurer une meilleure maintenance des moteurs électriques
- 4 principaux types de défaillances d'enroulement dans les moteurs électriques à courant alternatif
- Moteurs électriques à courant continu et à courant alternatif :quelles sont leurs différences ?