


Les options abondent lors de la sélection d'un capteur pour le retour moteur
Dans de nombreuses applications de contrôle de mouvement, il est nécessaire de connaître la position, la vitesse et peut-être même l'accélération du rotor d'un moteur ou de sa charge. En fonction de l'application et des spécificités de conception, le contrôleur de moteur peut avoir besoin de connaître ces paramètres de manière précise, approximative ou peut-être pas du tout. En connaissant la situation du moteur et l'état du rotor, le contrôleur de moteur a un scénario en boucle fermée (Figure 1).
Bien sûr, la vitesse, la position et l'accélération d'un moteur sont étroitement liées. Étant donné que la vitesse est la dérivée (vitesse de variation temporelle) de la position et que l'accélération est la dérivée de la vitesse, il est possible de déterminer les trois facteurs, même en ne connaissant qu'un seul d'entre eux (notez également le complément :la vitesse est l'intégrale de l'accélération et la position est l'intégrale de la vitesse).

Cependant, en pratique, cette méthode de détermination des paramètres associés est souvent (mais pas toujours) insuffisante à cause de la résolution et du bruit. Par exemple, savoir que le rotor a terminé une autre révolution vous renseigne sur les trois variables, mais avec une résolution très faible et généralement inacceptable. En fonction de l'application, la résolution et la précision nécessaires peuvent aller de grossière à modérée à précise. Une machine-outil à commande numérique a besoin d'informations précises sur le rotor, un contrôleur de lève-vitre automobile peut accepter des données approximatives, et une machine à laver ou un sèche-linge ne se contentera que d'informations grossières.
Fermer la boucle
Pour détecter la position ou le mouvement du rotor, les options les plus courantes sont les résolveurs, les codeurs optiques ou capacitifs et les dispositifs à effet Hall, par ordre décroissant de précision, de résolution et de coût. Ces capteurs sont très différents dans leur conception physique, leur mise en œuvre et leur interface électrique. Les utilisateurs doivent donc comprendre ce qui est nécessaire, quel est le meilleur choix dans une application donnée et comment ils interfaceront le capteur avec les circuits du contrôleur.
Les codeurs incrémentaux - utilisés lorsque seule la position relative est nécessaire ou que le coût est un problème - sont généralement utilisés avec les moteurs à induction AC. En revanche, les codeurs absolus - qui donnent une sortie binaire différente à chaque position, de sorte que la position de l'arbre est absolument déterminée - sont souvent associés à des moteurs sans balais à aimants permanents dans les applications servo. L'application, bien sûr, est le principal facteur qui détermine si des informations incrémentielles ou absolues sont nécessaires.
Bien que la plupart des commandes de moteur se fassent désormais via une boucle de commande numérique, le signal du capteur lui-même est soit entièrement analogique et doit être numérisé, soit un signal numérique mais avec des tensions et d'autres attributs qui le rendent incompatible avec les circuits numériques standard. Bien que certains des capteurs de retour soient proposés avec des sorties brutes qui peuvent être personnalisées selon vos préférences, beaucoup ont également des sorties conditionnées prêtes à être interfacées qui sont compatibles avec les ports, formats et protocoles d'E/S standard.
Bien que plus de résolution puisse sembler une bonne idée, ce n'est peut-être pas le cas en pratique. Trop d'une chose apparemment bonne - la résolution - peut ralentir un système en nécessitant un traitement supplémentaire d'informations qui ne sont pas nécessaires ou utiles, donc limiter la résolution au minimum nécessaire est une bonne idée.
Résolveurs
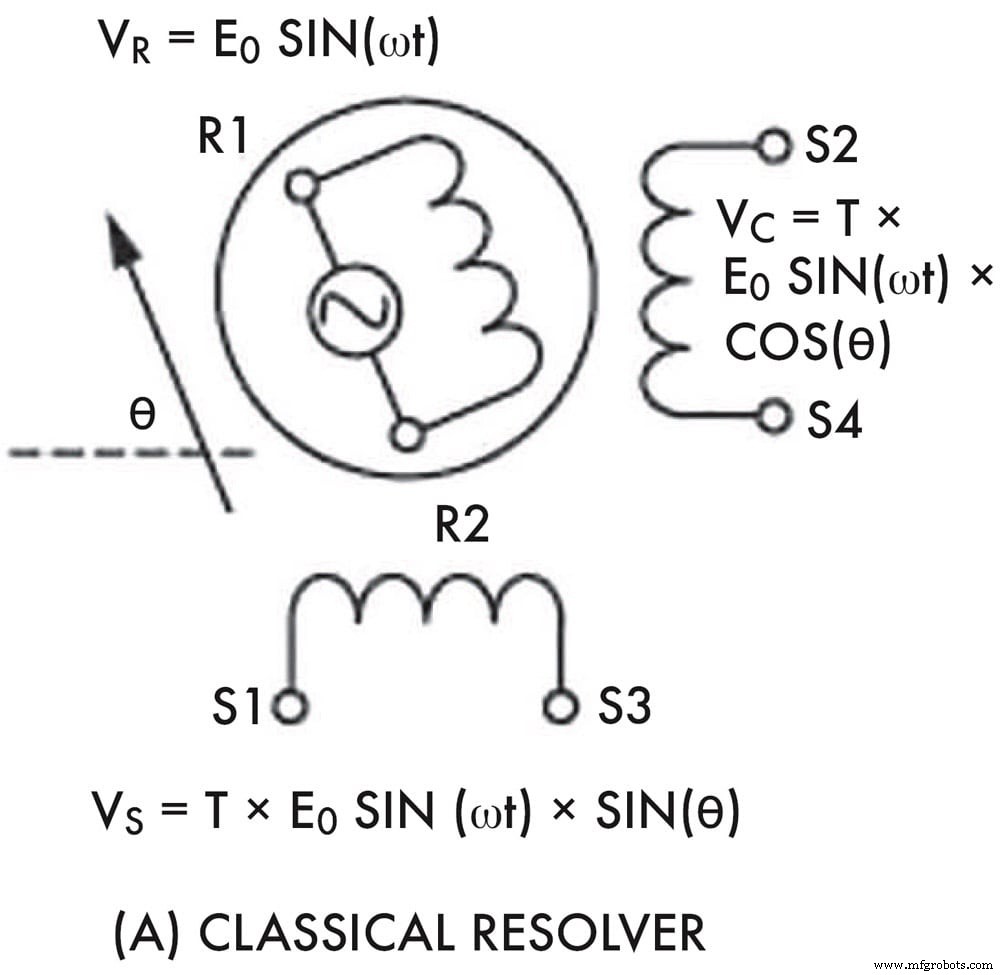
Les résolveurs sont des transducteurs de position extrêmement précis, robustes et absolus. Ils sont basés sur les principes fondamentaux du transformateur, avec un enroulement primaire plus deux enroulements secondaires, qui sont orientés en quadrature (90°) l'un par rapport à l'autre ( Figure 2). Le rapport de tours effectif et la polarité entre les enroulements primaire et secondaire varient en fonction de l'angle de l'arbre. Le primaire est excité avec une forme d'onde alternative de référence à fréquence constante, qui peut aller de 50 Hz/60 Hz à plusieurs centaines de kHz, et les sorties des enroulements secondaires seront déphasées en raison de leur placement physique. Les tensions de crête des secondaires varient lorsque l'arbre tourne et sont proportionnelles à l'angle de l'arbre. En démodulant ces sorties en utilisant le signal primaire comme référence, le circuit du résolveur peut fournir une lecture haute résolution de l'angle de l'arbre.
Le résolveur est non seulement précis mais aussi robuste. Les résolveurs n'ont aucun contact physique entre les côtés primaire et secondaire, pas de brosses ou de roulements séparés en plus de ceux du moteur lui-même, pas de points de friction qui entraîneront l'usure des pièces et aucune possibilité pour les contaminants (tels que l'huile) d'interférer avec en fonctionnement. Les résolveurs sont largement utilisés dans des situations extrêmement difficiles, telles que la mesure d'angle dans les armes militaires, en raison de leur robustesse mécanique et de leurs performances.
Cependant, les résolveurs ont tendance à être volumineux et relativement coûteux par rapport aux alternatives et nécessitent une quantité d'énergie relativement importante, ce qui est souvent inacceptable dans les applications à faible puissance. Ils nécessitent également des circuits relativement complexes pour la génération et la démodulation des formes d'onde CA, bien que cela soit beaucoup moins gênant avec les circuits intégrés modernes. Ils fournissent une indication de position absolue à la mise sous tension et ne nécessitent aucun mouvement pour indexer ou déterminer l'angle initial. Cette fonctionnalité est indispensable dans certaines situations et inutile dans d'autres.
Encodage pour la position, pas pour les données

Un encodeur optique (le terme encodeur n'est pas lié ici au codage des données numériques) dans une lecture de position incrémentielle utilise une source lumineuse (LED), deux photocapteurs en quadrature et un disque en verre ou en plastique entre eux (Figure 3). Le disque a de fines lignes gravées rayonnant de son centre et pendant qu'il tourne, les capteurs voient des motifs de lumière et d'obscurité.
Le nombre de lignes sur le disque et certaines autres techniques déterminent la résolution, qui est généralement de 1 024, 2 048 ou même jusqu'à 4 096 comptes par tour. Contrairement au résolveur de type transformateur, l'encodeur optique n'était pas un appareil grand public jusqu'au développement de LED à longue durée de vie et de photocapteurs efficaces.
La disposition physique des capteurs permet au codeur de déterminer le sens de rotation. Un circuit de base traduit les trains d'impulsions des deux capteurs (appelés sorties A/B) en une paire de flux binaires indiquant à la fois le mouvement et la direction (Figure 4).

L'encodeur est un indicateur de mouvement incrémental et non absolu. Pour déterminer la position absolue, la plupart des encodeurs ajoutent une troisième piste et un photocapteur comme piste de référence zéro indicateur; l'arbre doit tourner suffisamment pour passer la position de référence zéro pour que cela se signale. La véritable lecture de la position relative peut être ajoutée à un encodeur optique, mais cela ajoute de la complexité à l'unité.
Les codeurs optiques offrent une très bonne résolution mais ils ne sont pas aussi robustes que les résolveurs. La saleté peut interférer avec le chemin optique et le disque de l'encodeur peut se salir. Cependant, leurs performances sont plus que suffisantes pour de nombreuses applications et ils sont petits, légers, à faible consommation d'énergie, faciles à interfacer et peu coûteux.
Les codeurs optiques typiques pour les applications de moteur et de rotation sont les modules à deux canaux similaires HEDS-9000 et HEDS-9100 d'Avago Technologies (Broadcom). Ces modules à hautes performances et à faible coût se composent d'une source LED avec lentille et d'un circuit intégré de détection enfermés dans un petit boîtier en plastique en forme de C, ainsi que de l'électronique de commande et d'interface (Figure 5). Ils ont une source de lumière hautement collimatée et une disposition physique spéciale du photodétecteur, de sorte qu'ils sont très tolérants au désalignement de montage. (Le disque, appelé roue codeuse, est acheté séparément, avec une résolution de 500 CPR et 1 000 CPR pour le HEDS-9000 et entre 96 CPR et 512 CPR pour le HEDS-9100. Les modules fournissent deux canaux de A et TTL compatibles B sorties numériques et nécessitent une seule alimentation 5 V.)

La série CUI AMT10 est une alternative au codeur optique, basée sur des principes capacitifs au lieu de principes optiques ( Figure 6). Ces codeurs offrent une gamme d'unités modulaires robustes et de haute précision disponibles en versions incrémentielles et absolues, avec une résolution jusqu'à 12 bits (4 096 points) sélectionnable par l'utilisateur parmi 16 valeurs via une double entrée à quatre positions. commutateur de paquet de ligne (DIP). Les sorties en quadrature A/B compatibles CMOS (Complementary Metal Oxyde Semiconductor) de ces unités sont transmises via une interface périphérique série (SPI) standard.

Contrairement aux encodeurs optiques, les dispositifs CUI AMT utilisent un motif répétitif et gravé de conducteurs sur les parties mobiles et non mobiles de l'encodeur. Lorsque le codeur tourne, la capacité relative entre les deux parties augmente et diminue et ce changement de capacité est détecté, quelque peu analogue aux sorties des phototransistors dans un codeur optique. La saleté et les autres contaminants ont peu d'effet néfaste ici.
Gardez à l'esprit qu'un résolveur ou un codeur est également un dispositif mécanique avec des considérations de montage ainsi que des exigences de compatibilité électrique. Pour minimiser les problèmes de stockage et d'inventaire, CUI propose la série AMT10 avec une large gamme de manchons, couvercles et bases de montage, de sorte que le même codeur de base peut être utilisé sur une large gamme de diamètres d'arbre et d'installations.
Les résolveurs et les encodeurs peuvent produire des lectures de base avec une résolution aussi élevée que 1/100 de degré (0,6 minute d'arc) ou mieux, mais la précision n'est pas la même que la résolution (encore une fois, certaines applications sont plus concernées par l'un que par l'autre) . Que la conception utilise un résolveur ou un codeur, les sources d'erreur se produisent en raison de la température, de la vitesse de suivi des changements, des déphasages indésirables et d'autres facteurs. Cependant, les fournisseurs de ces unités ont trouvé des moyens d'éliminer, d'annuler ou de compenser bon nombre de ces défauts, souvent en utilisant des circuits basés sur des circuits intégrés entre la sortie brute du capteur et la sortie conditionnée qui va au contrôleur système.
Les appareils à effet Hall deviennent puissants
Une autre classe de dispositif de codage ou de capteur est également basée sur un principe usé par le temps qui nécessite que l'électronique et le conditionnement à semi-conducteurs modernes deviennent largement abordables, disponibles et efficaces. De plus, le circuit d'interface critique, qui peut utiliser la tension minuscule et l'interfacer facilement à un système, est désormais disponible sur puce, ce qui simplifie encore l'utilisation de cette technologie. Les dispositifs à effet Hall peuvent être utilisés pour détecter le flux de courant à travers un conducteur faisant partie du capteur, ou la présence ou l'absence d'un champ magnétique à proximité.

Ce que nous appelons l'effet Hall a été découvert par Edwin Hall en 1879; une différence de potentiel - la tension de Hall - est produite à travers un conducteur électrique perpendiculairement à un courant électrique dans le conducteur et à un champ magnétique perpendiculaire au courant (Figure 7).
Certains capteurs à effet Hall vont bien au-delà de l'incorporation de l'élément capteur lui-même. Le capteur de position Melexis MLX90367 Triaxis est un capteur absolu monolithique CI sensible à la densité de flux appliquée orthogonalement et parallèlement à la surface du CI. Il est sensible aux trois composantes de la densité de flux, ce qui permet au MLX90367 (avec le bon circuit magnétique) de décoder la position absolue de tout aimant mobile (comme une position rotative de 0 à 360°).

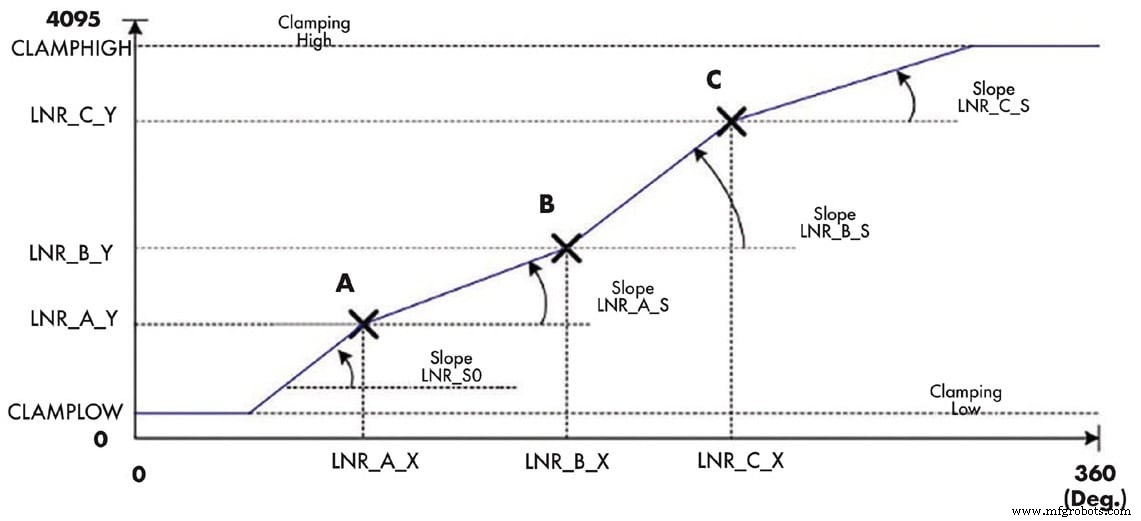
En interne, ce dispositif de résolution 12 bits comprend un traitement du signal sur puce, avec un microcontrôleur et un DSP (Figure 8), de sorte qu'il peut effectuer les calculs nécessaires ainsi que des corrections pour les non-linéarités inhérentes et plus encore (Figure 9). Il prend également en charge un large éventail de fonctions, de fonctionnalités et de divers formats de sortie sélectionnables par l'utilisateur, y compris un format avancé avec correction d'erreurs intégrée appelé SENT (SAE J2716-2010), qui est largement utilisé dans les applications automobiles.
La plupart des encodeurs magnétiques à effet Hall utilisent une roue fixée à l'arbre du moteur et la roue a un ensemble de pôles nord et sud magnétisés autour de son périmètre; c'est l'analogie magnétique avec la roue fendue du codeur optique. La roue est généralement fabriquée à partir d'une ferrite moulée par injection intégrée au réseau de pôles. Une roue typique est magnétisée avec 32 pôles (16 nord et 16 sud), de sorte que la résolution est bien inférieure à celle d'un codeur ou d'un résolveur optique, mais est souvent suffisante pour de nombreuses situations. Une installation typique comporte trois capteurs à effet Hall, espacés de 120 ° électriquement, pour détecter la commutation de la roue.
Résumé
Les concepteurs qui doivent détecter la position, la vitesse ou l'accélération du moteur disposent d'une grande variété d'options couvrant les nombreux paramètres clés et attributs de performance. Les résolveurs, les codeurs optiques et capacitifs et les dispositifs à effet Hall ont tous fait leurs preuves depuis longtemps, ainsi qu'un support étendu via le savoir-faire des applications.
Le choix peut être motivé par un facteur prédominant - comme la robustesse ou la faible puissance - ou par une utilisation traditionnelle et coutumière dans une situation donnée. Une fois que la technologie de base à utiliser est décidée, de nombreux fournisseurs viables et des pièces de chacun sont disponibles, de sorte que la décision sur un appareil spécifique peut nécessiter des recherches pour mieux comprendre les compromis.
Cet article a été écrit par Bill Schweber pour Mouser Electronics, Mansfield, TX. Pour plus d'informations, rendez-vous ici .
Capteur
- Renesas étend les options de microcontrôleur pour la servocommande dans les robots industriels
- Le capteur de position inductif pour moteurs industriels offre une vitesse élevée et une grande précision
- 5 questions à poser lors de la sélection des matériaux pour les produits modernes
- Capteur ultra-sensible et résilient pour les textiles intelligents
- Capteur de gaz portable pour la surveillance de la santé et de l'environnement
- Capteur d'oxygène sans fil miniaturisé pour nourrissons malades
- Le capteur souple augmente la sensibilité du bout des doigts pour les robots
- Capteur ultra fin pour lentilles de contact intelligentes
- Capteur de position inductif sans contact