


Cinématique inverse en robotique :ce que vous devez savoir
Qu'est-ce que la cinématique inverse ?
Que devez-vous savoir à ce sujet pour tirer le meilleur parti de votre robot ?
La cinématique inverse pour la robotique est un sujet vaste et souvent complexe. En fonction de votre projet, vous devrez peut-être le connaître en détail ou vous débrouiller avec des connaissances de base.
Voici les informations essentielles que vous devez connaître sur la cinématique inverse pour la robotique.
Qu'est-ce que la cinématique inverse ?
La cinématique inverse est un processus mathématique utilisé pour calculer les positions des articulations nécessaires pour placer l'effecteur d'extrémité d'un robot à une position et une orientation spécifiques (également appelées sa "pose"). Une solution cinématique inverse fiable est nécessaire pour programmer un robot pour effectuer des tâches.
Il est important d'être clair sur les différences entre la cinématique inverse et la cinématique avant du robot.
La cinématique avant détermine où se trouvera l'effecteur terminal si les articulations sont réglées dans une position spécifique. Il n'y a jamais qu'une seule solution à l'équation cinématique directe. Lorsque les articulations sont réglées sur une position spécifique, l'effecteur final se retrouvera toujours au même endroit.
Avec la cinématique inverse, il existe souvent plusieurs solutions différentes et plusieurs approches pour calculer la solution cinématique inverse.
Pourquoi avons-nous besoin de la cinématique inverse en robotique
Si nous n'avions pas la cinématique inverse, la programmation du robot serait extrêmement difficile... voire impossible.
Lorsque vous souhaitez que l'effecteur final de votre robot se déplace vers un endroit particulier de son espace de travail, il est logique que vous saisissiez la pose souhaitée dans le programme.
Mais, vous ne pouvez pas simplement dire à un robot d'aller à votre X, Y et Z souhaité coordonne et attendez-vous à ce que le robot comprenne vos instructions… pas sans cinématique inverse.
La plupart des robots industriels sont constitués de plusieurs joints articulés contrôlables indépendamment. Chaque articulation est reliée à une ou plusieurs des autres articulations, parfois dans des configurations complexes. L'effecteur terminal est fixé à la fin de toute la "chaîne cinématique". Lorsque vous déplacez une articulation, cela affectera la pose de l'effecteur terminal de différentes manières.
Cela signifie qu'il n'y a pas de relation simple et directe entre la position de l'effecteur terminal et une articulation particulière.
Par exemple, si vous voulez que l'effecteur terminal du robot se déplace de 1 mm linéairement le long de l'axe Z, vous devrez peut-être déplacer toutes les articulations d'une quantité différente.
Enfin, des algorithmes de cinématique inverse calculent la position exacte de chacune des articulations du robot nécessaires pour atteindre la position d'effecteur souhaitée.
Comment trouver la cinématique inverse d'un bras de robot
Lorsque vous effectuez des recherches sur la cinématique inverse pour la robotique, vous trouverez souvent des pages et des pages d'équations, de formules et de descriptions d'algorithmes. En effet, le calcul de la cinématique inverse est un domaine bien établi dans la recherche en robotique. Peu de gens parlent de cinématique inverse en dehors du domaine de la recherche (sauf pour les animateurs 3D).
Cependant, lorsque nous utilisons des robots pour des applications industrielles, il existe 2 options de base pour trouver une solution de cinématique inverse :
- Vous pouvez faire tout le travail mathématique et de programmation vous-même pour créer un solveur cinématique inverse pour votre robot spécifique.
- Vous pouvez utiliser un solveur cinématique inverse existant pour votre robot spécifique qui fonctionne "prêt à l'emploi".
Lequel de ces éléments vous choisirez dépendra de votre situation unique.
Si vous avez construit le robot vous-même - c'est-à-dire que vous l'avez construit à partir de zéro en connectant des moteurs et des liaisons mécaniques ensemble - vous devrez probablement choisir l'option 1.
Si vous utilisez un robot industriel provenant d'un fabricant de robots, l'option 2 sera presque toujours plus rapide et plus simple.
La méthode difficile :créer un solveur de cinématique inverse
Si vous choisissez de créer votre propre solveur cinématique inverse, préparez-vous à une programmation sérieuse !
Il existe 2 approches fondamentales pour calculer la cinématique inverse :
1. Solutions cinématiques inverses analytiques
Un solveur cinématique inverse analytique sera capable de prendre la pose d'effecteur final souhaitée et de recracher (presque) immédiatement les positions articulaires requises.
En effet, "sous le capot", la chaîne cinématique du robot a été réduite à une expression de forme fermée - pour toute pose d'effecteur terminal, il existe une définition mathématique des positions articulaires requises.
Bien que vous puissiez effectuer le travail de génération de l'expression de forme fermée vous-même (à la main), cela n'est généralement pas nécessaire. De nos jours, la bibliothèque IKFast rend cette tâche beaucoup plus facile qu'auparavant.
2. Solveurs cinématiques numériques/itératifs
Tous les robots n'ont pas une solution cinématique inverse analytique. Lorsque la structure cinématique du robot est complexe ou inhabituelle, la seule option est d'utiliser un solveur numérique de cinématique inverse.
De plus, dans une solution numérique, il n'y a pas d'expression claire de forme fermée. Au lieu de cela, lorsque vous saisissez la position souhaitée de l'effecteur final, un algorithme itératif travaille vers une solution pour les positions articulaires requises en la traitant comme une solution d'optimisation.
À chaque itération, l'algorithme entre certaines positions articulaires dans l'équation cinématique avant du robot pour savoir où se trouve l'effecteur final. Dans l'itération suivante, il utilise ces informations pour ajuster davantage les positions des articulations. Cela déplacera progressivement l'effecteur final vers la pose souhaitée.
En raison de cette approche itérative, les solutions de cinématique inverse numérique sont plus lentes que les solutions analytiques.
La méthode simple :utilisez un solveur éprouvé de cinématique inverse
Créer votre propre solveur de cinématique inverse est un bon exercice intellectuel lorsque vous êtes à l'université ou si vous construisez votre propre robot à partir de rien.
Mais, si vous souhaitez simplement utiliser votre robot dans un environnement de production, il est peu probable que vous deviez créer votre propre solveur de cinématique inverse.
Il est beaucoup plus facile et plus rapide d'utiliser simplement un solveur existant qui est déjà intégré à votre environnement de programmation de robot.
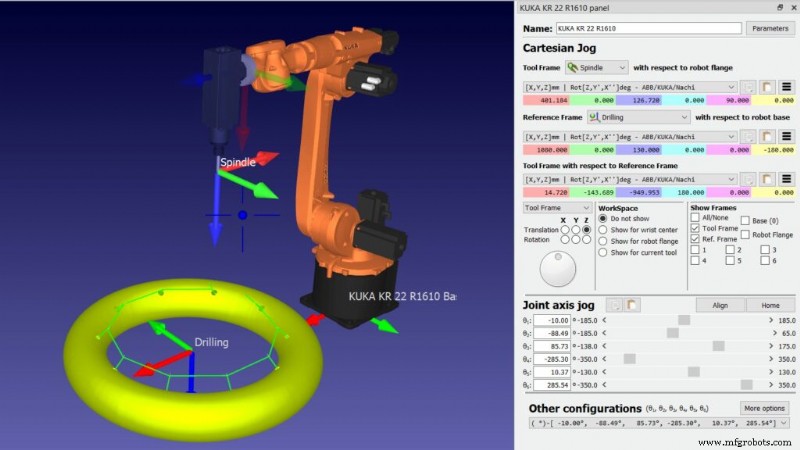
Tous les robots de la bibliothèque de robots de RoboDK sont livrés avec leurs propres solveurs cinématiques inverses. Cela vous permet de commencer à les programmer immédiatement sans jamais avoir à y penser.
La plupart de nos solveurs sont des solutions analytiques pré-générées fournies avec le fichier robot. Cependant, certains des robots les plus complexes de la bibliothèque utilisent des solveurs numériques. Même avec les solveurs numériques, la vitesse de calcul réduite n'est pas un problème avec RoboDK car vous programmerez votre robot hors ligne avant d'envoyer votre programme au robot lui-même.
Après tout, ne créez votre propre solveur cinématique inverse que si vous en avez vraiment besoin.
Si ce n'est pas le cas, votre temps sera bien mieux utilisé pour créer le programme de robot pour votre tâche et le mettre en production plus rapidement.
Quelles questions avez-vous sur la cinématique inverse en robotique ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK.
Robot industriel
- Maintenance prédictive – Ce que vous devez savoir
- Ce que vous devez savoir sur la certification CMMC
- Ce que vous devez savoir sur l'assemblage de PCB
- Ce que vous devez savoir sur le processus de surmoulage
- Ce que vous devez savoir sur l'exportation de machines
- Moteurs AC et DC :ce que vous devez savoir
- Ce que vous devez savoir sur le freinage dynamique
- Ce que vous devez savoir sur les freins à assistance hydraulique
- Ce que vous devez savoir sur les matériaux de friction industriels