


Automatisation de portail coulissant
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
À propos de ce projet
Présentation du projet
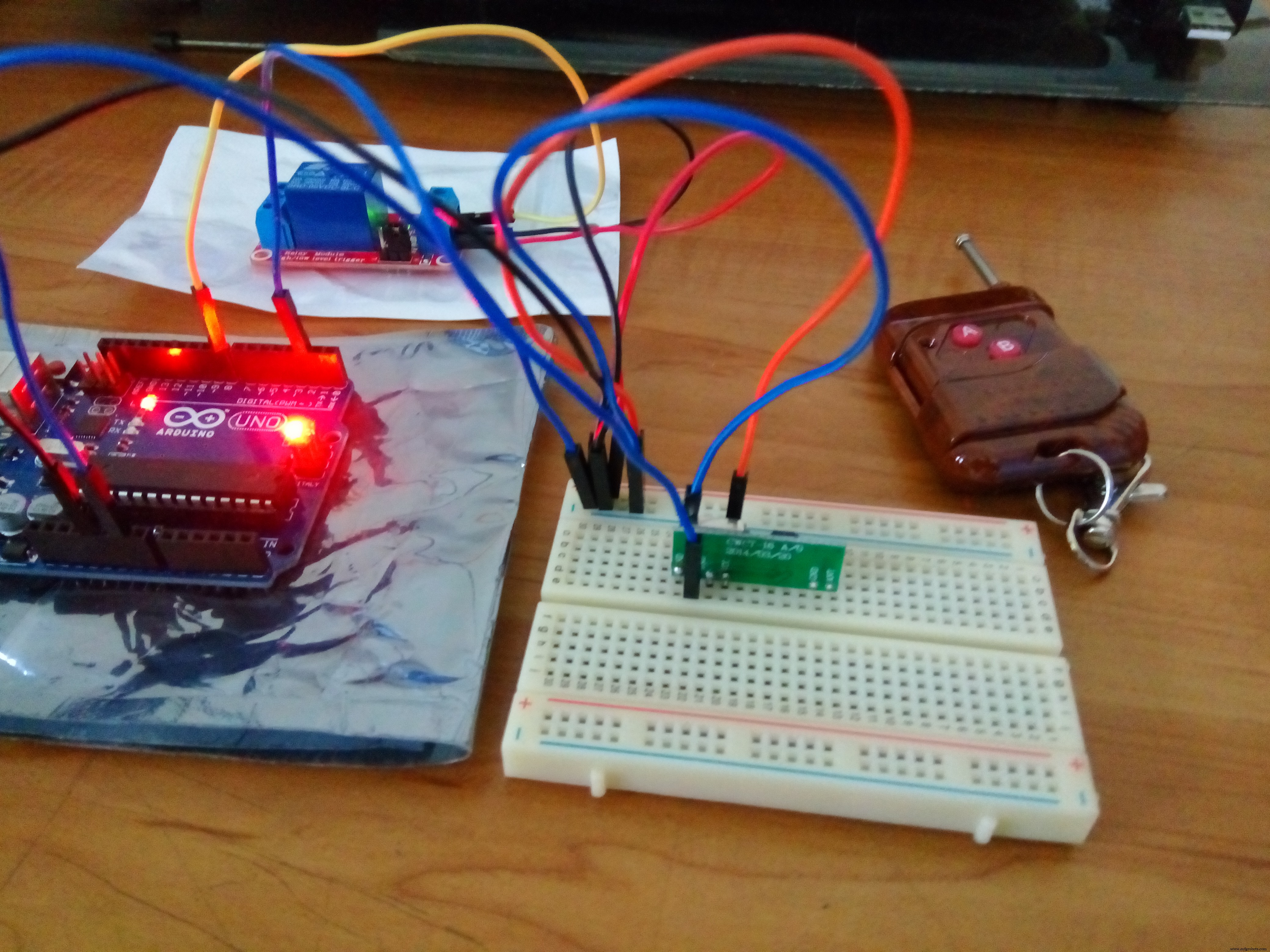
Dans ce projet, j'utilise la puissance d'Arduino pour créer un circuit pour alimenter une porte coulissante. L'objectif principal de ce projet est d'utiliser un portail coulissant mort avec un moteur à courant alternatif fonctionnel et d'automatiser le système à l'aide d'un Arduino, de quelques relais, d'un récepteur 433 MHz, d'un émetteur 433 MHz et de quelques compétences électriques astucieuses. Le système crée une méthode pour alimenter le moteur du portail lorsque cela est nécessaire et pour décider d'ouvrir ou de fermer le portail.
L'Arduino écoute en permanence une réponse définie de l'émetteur, dans ce cas il s'agit de la télécommande utilisée pour ouvrir ou fermer le portail. L'émetteur fonctionne sur deux canaux, chaque canal ayant son identifiant unique. Une fois que cet identifiant est reçu par le récepteur 433MHz, il envoie un signal à l'Arduino qui contrôle les relais pour alimenter le moteur.
Méthodologie
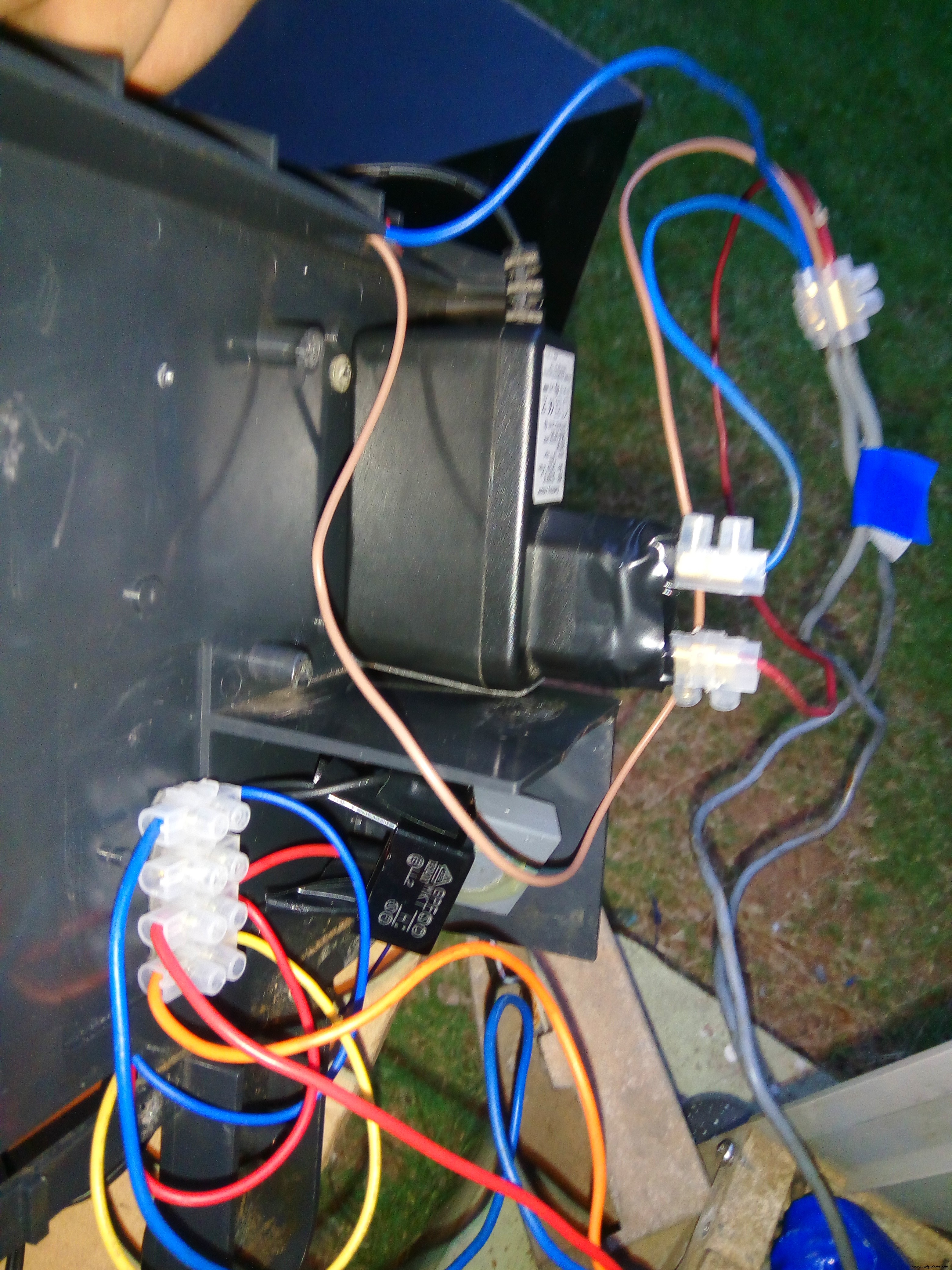
Etape 1 :Mise sous tension du moteur
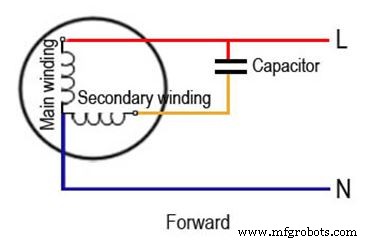
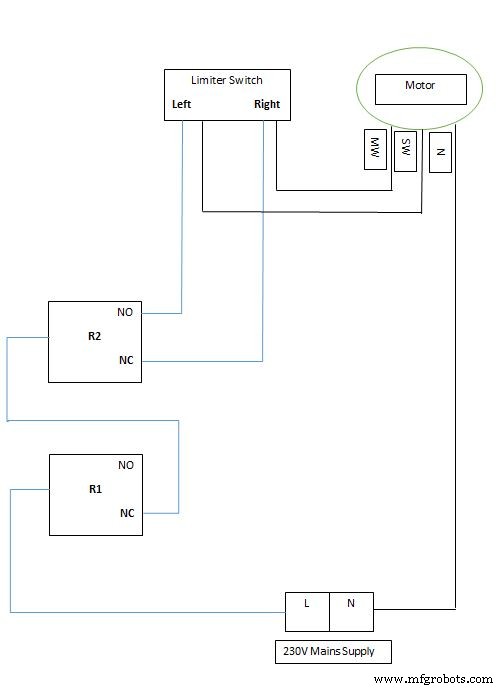
La configuration pour alimenter le moteur est illustrée ci-dessous. Pour que le moteur déplace le portail vers l'avant (fermeture), l'enroulement principal doit être connecté à l'alimentation principale.
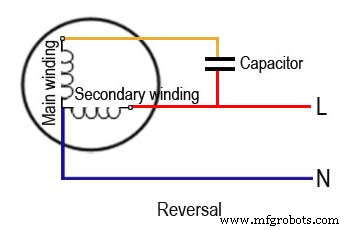
Pour que le moteur se déplace dans le sens opposé (ouvert), l'enroulement secondaire doit être connecté à l'alimentation principale.
Il est nécessaire d'identifier quel fil correspond à quel enroulement. Habituellement, les fils ne sont pas étiquetés et cela peut être identifié par essais et erreurs en alimentant le fil en courant alternatif.
Dans mon cas, je travaillais avec un moteur 220 ~ 240VAC. J'ai pu identifier facilement le fil neutre car il était de couleur bleue, qui est une couleur standard utilisée pour indiquer la borne neutre.
Ensuite, j'ai connecté la borne Live au fil rouge, ce qui a fait tourner le moteur vers l'avant. Cela indiquait que j'ai alimenté l'enroulement principal du Moteur.
Remarque : Assurez-vous que le condensateur de démarrage est correctement connecté et fonctionne. Cela garantit que le moteur a un couple de démarrage adéquat.
Etape 2 :Arrêt du moteur
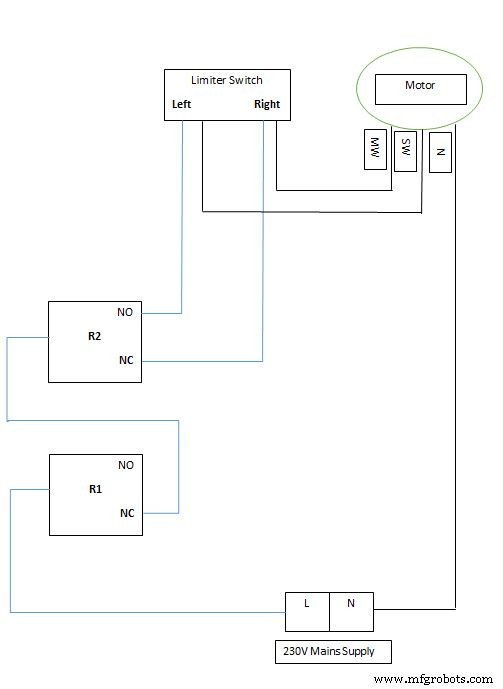
L'alimentation secteur est fournie au moteur via un interrupteur limiteur. Dès que le portail atteint une extrémité, l'interrupteur limiteur est déclenché, ce qui ouvre le circuit et empêche le réseau d'alimenter le moteur.
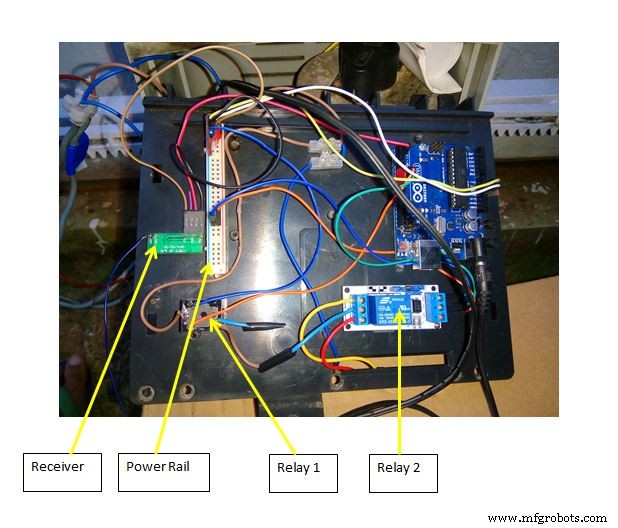
Étape 3 :Utiliser des relais pour contrôler le moteur
Le relais a deux points de contact; Normalement ouvert et Normalement fermé.
Le chemin normalement fermé est utilisé pour alimenter l'enroulement principal du moteur. Ceci a été choisi pour s'assurer que lorsque le système était réinitialisé ou en cas de problème dans le système, le moteur garantirait que la porte reste fermée à tout moment.
Le chemin normalement ouvert est utilisé pour alimenter l'enroulement secondaire du moteur. Le chemin normalement ouvert est fermé lorsque la bobine à l'intérieur du relais est excitée. Cela peut être fait en envoyant un signal 5V depuis l'Arduino car les relais utilisés fonctionnent sous 5V.
En utilisant deux chemins pour alimenter le moteur, le moteur garantit que l'alimentation n'est pas fournie simultanément aux enroulements principal et secondaire du moteur.
Ce relais (R2 ) est exploité via la broche 8 de l'Arduino.
Un deuxième relais(R1 ) est utilisé pour couper le circuit afin que le moteur s'arrête si l'Arduino reçoit la commande du récepteur pendant que le portail se déplace.
L'Arduino vérifie constamment le récepteur s'il a reçu une commande. Une fois qu'une commande est émise, l'Arduino redirige l'alimentation vers le moteur afin qu'il ferme ou ouvre le portail.
L'objectif principal du deuxième relais est de donner au système suffisamment de temps pour rediriger le système pour alimenter le moteur sans changer instantanément la direction dans laquelle le moteur tourne. Une fois le réacheminement terminé, le relais s'éteint et le moteur est alimenté pour qu'il tourne dans le sens opposé.
Ce relais est actionné via la broche 9 de l'Arduino.
But du deuxième relais
Si le système est à mi-chemin de la fermeture du portail et reçoit la commande du récepteur pour ouvrir le portail, le relais est activé pour rediriger l'alimentation vers l'enroulement secondaire. Puisque cela se produit presque instantanément, le relais est sous pression constante de la tension inverse générée par le moteur en raison d'une prise de courant soudaine sur l'enroulement principal. De plus, endommager les contacts du relais de façon permanente si sollicité en permanence.
À l'aide d'un relais supplémentaire, l'alimentation électrique est déconnectée du moteur et donne au système un délai de 10 secondes pour rediriger l'alimentation vers les enroulements nécessaires. Cela réduit les contraintes sur les contacts du relais et augmente leur durée de vie.
Méthode de protection du relais :
Condensateurs de suppression
Lorsqu'un moteur à courant continu est soudainement arrêté, une boucle de courant négative est créée par la bobine du moteur, cela est dû aux propriétés inductives d'une bobine. Cependant, cela peut être neutralisé en installant une diode de rétroaction pour fournir un chemin au courant négatif pour circuler.
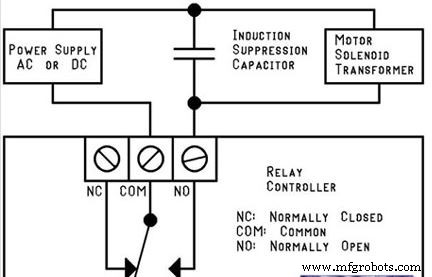
Lorsqu'un moteur à courant alternatif est soudainement arrêté par un interrupteur, il crée une accumulation de haute tension sur les contacts de l'interrupteur.
Les condensateurs de suppression sont utilisés pour empêcher l'accumulation de haute tension sur les contacts du relais lorsqu'on dit au moteur de fonctionner dans le sens opposé. Cela protège les contacts de relais.

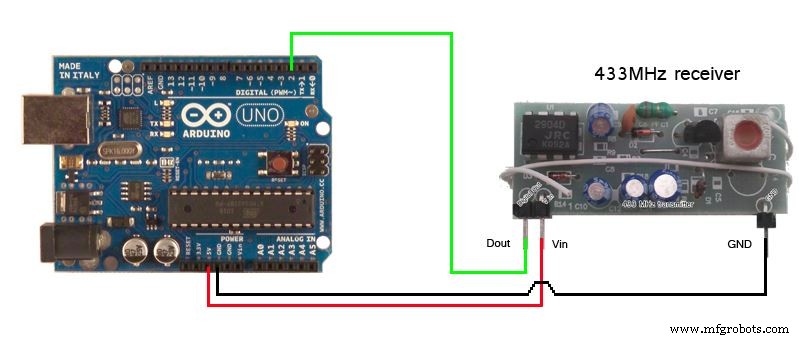
Etape 4 :Pour configurer le récepteur
Le récepteur fonctionne à 433 MHz, le programme d'Arduino est en boucle en continu pour vérifier le port de signal du récepteur. Une fois le signal correct reçu, Arduino active ensuite le relais 1 (R1) afin que le relais 2 (R2) achemine l'alimentation vers le moteur.
Lorsque des données sont envoyées par l'émetteur, elles sont reçues par le récepteur sous la forme d'un nombre entier. Dans mon cas, en utilisant le moniteur série de l'Arduino, j'ai pu voir la valeur que le récepteur était capable de capter.
Les principales raisons de l'utilisation d'une fréquence radio plus élevée pour la communication sont que la plage de fonctionnement est élevée et que le signal est reçu par le récepteur même s'il y a quelques obstacles bloquant le signal. Ceci ne peut être réalisé que par des ondes radio à haute fréquence.
Dans mon projet, j'ai pu obtenir un rayon de travail d'environ 30 pieds pour que le système s'active.
Remarque : Le rayon de fonctionnement du système peut être étendu de quelques pieds en soudant une longue longueur de fil à l'Antenne port dans le module récepteur.

Vidéo de démonstration
Instantanés du projet final
Schémas
Processus de fabrication
- DOMOMATISATION RASPBERRY PI
- Prototype Raspoulette
- Énergie éolienne
- Guide des marteaux électriques
- Le centre de tournage est doté d'un moteur de broche à couple élevé de 75 HP
- Industrie 4.0 dans la fabrication :la puissance croissante de l'automatisation
- Qu'est-ce qu'un moteur linéaire ?
- Comprendre l'automatisation de la presse
- Qu'est-ce qu'un servomoteur ?