


bug laid
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Contexte
Voici un petit robot rapide et facile qui peut être construit et assemblé en une demi-heure environ avec les bons outils et pièces.
Je ne l'ai pas inventé. J'ai vu une vidéo d'une chose comme celle-ci sur YouTube et je me suis dit "Hé, ça a l'air amusant, je vais en construire une."
J'ai donc sorti des servos de ma malbouffe, une vieille batterie de portable que j'avais gardée dans l'espoir de trouver quelque chose de sympa à faire avec, un Arduino Pro 3.3v que j'avais acheté sur un coup de tête car j'avais besoin d'atteindre le quota pour livraison gratuite et je suis allé travailler.
Une heure plus tard, c'était ici !
Assemblage
Commençons par le montage de base.
Coupez le bras de montage qui se trouve à l'opposé du côté où les fils sortent sur l'un des servos (ce sera votre servo arrière). Le servo arrière pointe vers le bas et l'autre vers l'avant. Vous pouvez utiliser de la colle ou des attaches de câble pour les maintenir ensemble.

Ensuite, accrochez un fil rouge et un fil noir au positif et au négatif de la batterie de votre téléphone portable (je les ai maintenus en place avec du ruban d'électricien). Si vous avez une batterie Li-Ion, alors vous n'avez pas à lutter avec ça :)
Ensuite, j'ai collé la mini planche à pain sur la batterie. Vous n'êtes pas obligé, bien sûr. Cela dépend si vous prévoyez de réutiliser ou non les pièces de ce robot.
Attachez le câble de votre batterie et de votre planche à pain sur le servomoteur.
Coupez un coin dans la balle de ping-pong. Cela semble facile, n'est-ce pas ? :) C'est peut-être l'étape la plus difficile de tout ce tutoriel ! Une balle de ping-pong est remarquablement solide et aussi... ronde. Couper les choses en rond demande de la patience. Et porter lunettes !!! Peu importe l'appareil que vous utilisez pour le couper. Le plastique (ou tout autre matériau étrange dont la mine était faite) se brise beaucoup. Alors lunettes ! Je veux que vous puissiez toujours lire le reste de ce tutoriel une fois la découpe terminée !
Vérifiez que votre Arduino rentre bien dans le trou. Puis collez la balle de ping-pong au reste de l'animal.
Pour les jambes, je vous laisse à vous-même. Le mien était un simple morceau de fil d'acier de 1 mm d'épaisseur plié dans et autour du support d'aile des servos (comme sur la photo) Au bout de chaque jambe, j'ai placé un petit pied découpé dans un bâton de pistolet à colle pour l'adhérence.
Il suffit de chauffer le fil avec un briquet et de le planter dans votre pied de fortune. la colle va fondre au contact et se solidifier à nouveau très rapidement.
Avant d'attacher les jambes au reste du monstre, vous devrez faire les circuits et charger le croquis sur le tableau. Vous devrez lire à ce sujet si vous ne savez pas comment télécharger un croquis sur l'Arduino Pro Mini. https://www.arduino.cc/en/Guide/ArduinoProMini
Le code de celui-ci est extrêmement simple donc je ne vais pas le parcourir.
Il a un délai de 5 secondes à la fin de la configuration afin que vous ayez le temps de débrancher votre Arduino avant que les jambes ne commencent à bouger mais après les avoir centrées.
Vous pouvez maintenant placer vos jambes et les visser en place.
Une fois les pattes vissées, vous pouvez même choisir de modifier le programme et de raccourcir (ou supprimer) le délai de la ligne 13.
Démonstration
Si tout s'est bien passé, vous devriez maintenant avoir un petit bonhomme mignon ressemblant un peu à ceci :
Et regardez la vidéo Triceratops de ClaudioGasp dans les commentaires ! C'est GÉNIAL !
Code
- Bogue
BogueArduino
#includeint FRONT =4;int BACK =5;Servo frontLegs, backLegs;void setup() { pinMode(13, OUTPUT); //Ceci est juste pour le frontLegs.attach(FRONT); backLegs.attach(BACK); frontLegs.write(90); //Centrer le servo backLegs.write(90); //Centrer le délai d'asservissement (5000); //Attendez 5 secondes (cela nous donne le temps de débrancher l'arduino // afin que nous puissions fixer les jambes.}boucle vide() { digitalWrite(13,HIGH); //LED on delay(200); frontLegs.write(70 ); // déplace un peu la jambe avant (200); backLegs.write (70); // déplace un peu la jambe arrière digitalWrite (13,LOW); // DEL éteint le délai (200); frontLegs.write (110); // déplace un peu la jambe avant (200); backLegs.write(110); // déplace un peu la jambe arrière}
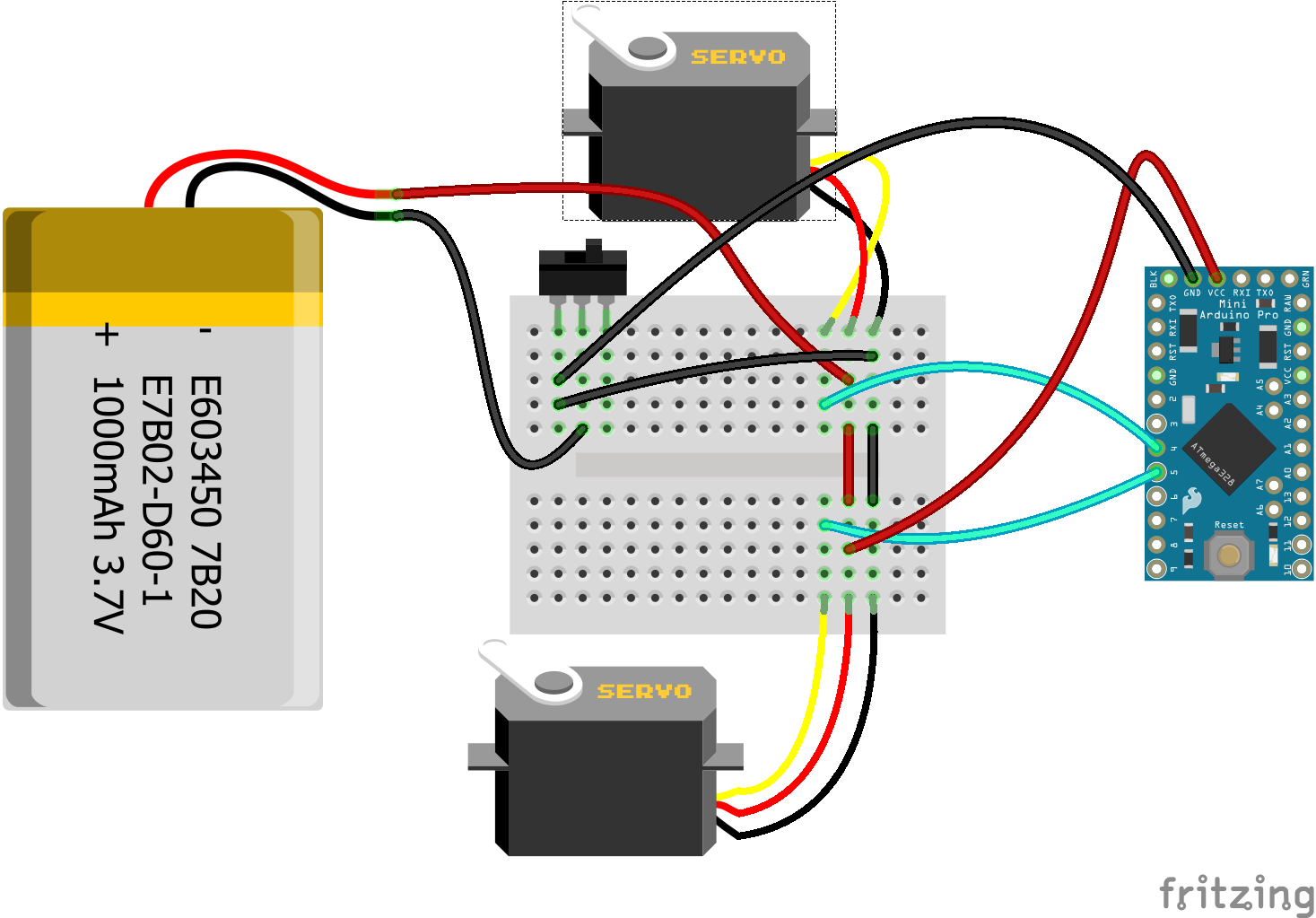
Schémas
bug_Yr3jFYFuNQ.fzzProcessus de fabrication