


Comment mesurer la masse de la Terre à l'aide d'Arduino
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 2 | |||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Présentation
Un beau jour, je me pesais sur une balance. Soudain, une pensée m'est venue à l'esprit :« Quelle serait la masse de la Terre ? Laissez cela de côté : « Comment pouvons-nous même le mesurer ? » Il n'existe pas de telle balance sur laquelle la Terre puisse être placée. Il doit y avoir un moyen indirect de mesurer la masse de la Terre. Je présente ici la mise en œuvre d'une de ces méthodes indirectes pour mesurer la masse de la Terre.
Étape 1 :La méthode indirecte
Au début du XIXe siècle, les scientifiques utilisaient la deuxième loi de Newton et la loi de la gravitation universelle de Newton pour mesurer la masse de la Terre. Ces équations sont respectivement F =ma et F=(GmM)/(r^2) (m=masse de l'objet, a=accélération, G=Constante gravitationnelle, M=masse de la Terre, r=Rayon de la Terre) . Si nous substituons g, c'est-à-dire l'accélération due à la gravité au terme d'accélération « a » et combinons ces deux équations, nous obtenons.
mg =GmM/r^2
Cette équation peut être résolue pour M, c'est-à-dire la masse de la terre.
M =(gr^2)/G.
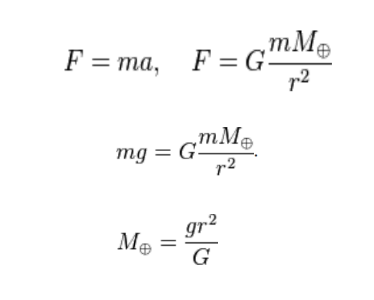
Nous supposerons que nous connaissons la valeur de G et r. Nous allons trouver g c'est-à-dire l'accélération due à la gravité en utilisant une petite expérience, impliquant arduino et quelques capteurs. Enfin, nous allons rassembler toutes les choses pour trouver la valeur de M.
regardez l'image ci-jointe pour les expressions mathématiques appropriées.
Commençons par l'expérience.
Étape 2 : présentation de l'expérience
(supportez-moi un peu de maths ici, arduino va bientôt entrer en action)
Pour déterminer l'accélération due à la gravité, nous devons connaître une chose appelée «chute libre», c'est un mouvement dans lequel un corps/objet se déplace vers la terre, uniquement sous la force de la gravité. Or, peu de termes scientifiques caractérisent cette chute libre. Ce sont la vitesse initiale, la vitesse finale, la distance parcourue, le temps de vol et l'accélération.
- Vitesse initiale - vitesse du corps en chute libre au début de la chute libre ou au début de l'expérience.
- Vitesse finale - vitesse du corps en chute libre à la fin de la chute libre ou à la fin de l'expérience.
- Distance parcourue - distance parcourue par le corps en chute libre pendant la chute libre.
- Heure de vol - temps nécessaire pour couvrir la distance parcourue en chute libre.
- Accélération - le taux de changement de vitesse observé par un corps en chute libre. Elle est égale à l'accélération due à la gravité.
Maintenant, il y a une des équations de Newton qui va comme -
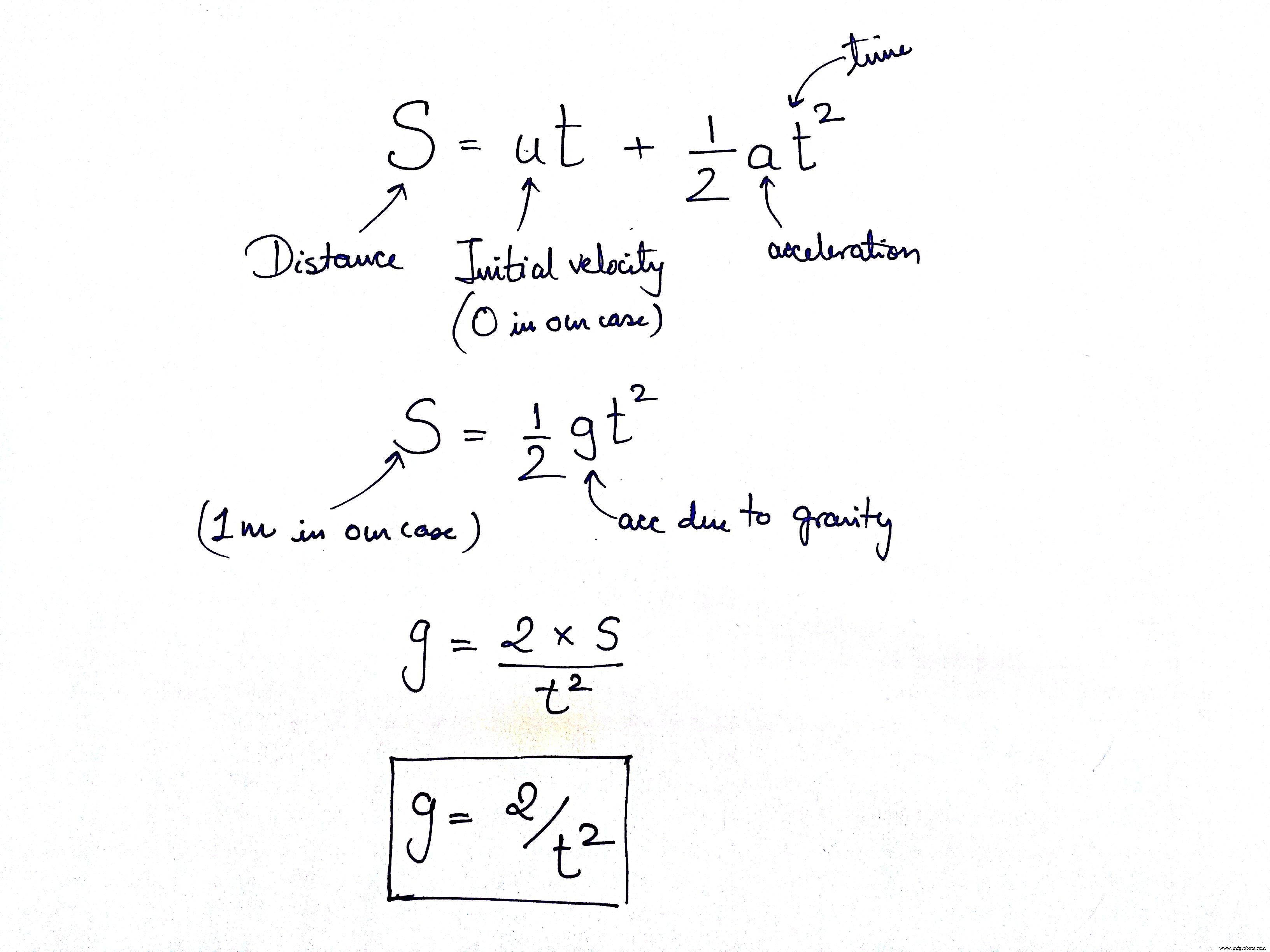
Distance parcourue =(vitesse initiale * temps de vol) + (accélération * (temps de vol)^2)/2
Il y a 4 variables dans l'équation ci-dessus, dont une qui nous intéresse, c'est-à-dire « l'accélération », sur ces 4 variables si nous en connaissons 3, nous pouvons calculer la 4ème variable inconnue restante.
Nous pouvons en réparer 2
- Distance parcourue =1 mètre (nous allons laisser tomber notre objet d'une hauteur de 1 mètre)
- vitesse initiale =0 m/s (nous allons commencer notre expérience depuis le repos)
Nous nous retrouvons avec 2 variables inconnues, c'est là qu'arduino entre en jeu et nous aide à trouver l'heure de vol. Pour déterminer avec précision l'heure du vol, nous avons besoin de deux horodatages 1. début du vol et 2. fin du vol.
Nous allons créer des circuits personnalisés pour déterminer ces deux horodatages à l'étape 4, je décris le circuit pour trouver l'horodatage du début du vol et à l'étape 5 la fin du vol.
Avec l'aide d'arduino et de quelques capteurs, nous calculerons le temps de vol, ne laissant qu'une inconnue dans l'équation ci-dessus, à savoir l'accélération due à la gravité (bingoooo!!!).
Mettons nos valeurs de variables fixes dans l'équation mentionnée ci-dessus, pour simplifier davantage l'équation.
1 =(g * (temps de vol)^2)/2
Alors,
g =2 / (temps de vol)^2
Les détails du test suivront à l'étape 7.
En cas de doute, référez-vous à l'image ci-jointe.
Étape 3 : choses dont nous aurons besoin
Voici la liste des éléments dont nous aurons besoin pour l'expérimentation afin de mesurer l'accélération due à la gravité.
- Toute carte Arduino, de préférence uno/duomilanove (aucune raison précise pour laquelle j'ai utilisé cette carte pour cette expérience)
- Câble USB pour connecter Arduino au PC
- Résistances 560 Ohm (4 en quantité), résistances 100 Ohm (2 en quantité)
- capteur piézoélectrique (4 en quantité)
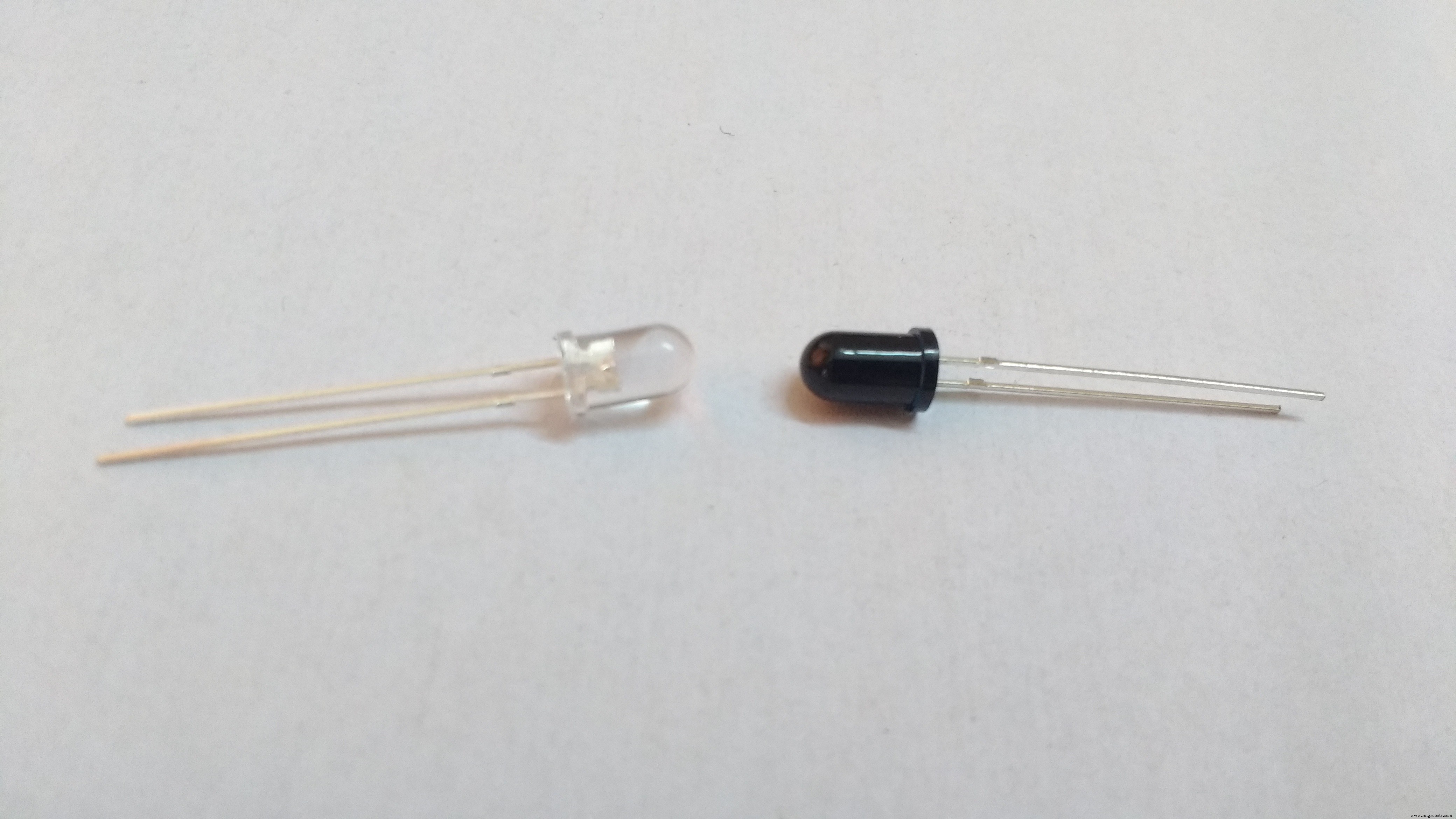
- Une paire d'IR Tx (IR LED) et Rx (Photodiode)
- Un potentiomètre
- Un ampli op (comme UA741C)
- Une planche à pain
- Trois fils de 1,2 mètre de long
- petit PCB à usage général de 5 cm x 5 cm pour l'assemblage de circuits IR
- Ruban
- Feuille de carton
En cas de doute, regardez les images ci-jointes.










Étape 4 :Schéma 1 :Le circuit infrarouge
Ce circuit sera utilisé pour horodater l'heure de début de la chute libre d'un objet utilisé pour mesurer « g ». Voici les points importants concernant l'image schématique ci-jointe.
- La LED IR est utilisée en polarisation directe qui agit comme une LED normale dans cette application, c'est-à-dire illuminant la photodiode du récepteur IR.
- La photodiode est utilisée en polarisation inverse.
- La sortie de la jonction de la cathode et de la résistance est connectée à l'une des bornes d'entrée de l'amplificateur opérationnel.
- L'autre borne d'entrée de l'ampli-op est connectée au potentiomètre qui détermine la tension de seuil.
- La sortie de l'opamp va à la carte Arduino.
Référez-vous à la vidéo (temps=5m 16s) en cas de doute.
Étape 5 : Schéma 2 : le circuit piézoélectrique
Ce circuit sera utilisé pour horodater l'heure de fin de la chute libre d'un objet utilisé pour mesurer « g ». Voici les points importants concernant l'image schématique ci-jointe.
- 4 capteurs piézoélectriques sont connectés comme indiqué sur le schéma.
- Une résistance de 4 560 ohms est connectée en parallèle aux capteurs piézoélectriques pour réduire le pic de tension généré par le capteur piézoélectrique lorsqu'un objet en chute libre frappe sa surface.
- La borne négative des capteurs piézoélectriques est connectée à la terre du circuit.
- La borne positive du capteur piézoélectrique est connectée aux broches d'entrée analogique.
En cas de doute se référer à la vidéo ci-jointe (temps =9m 2 sec).
Étape 6 :Assembler les choses
Suivez ces instructions pour mettre les choses ensemble.
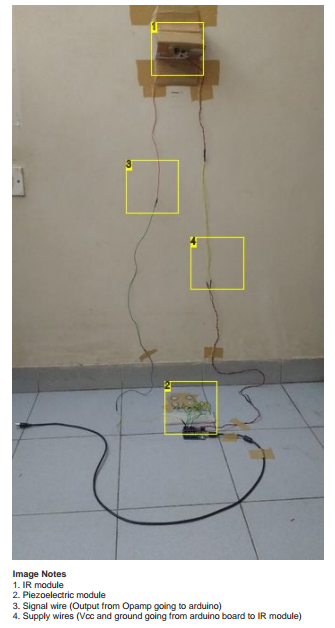
- Utilisez du carton pour créer une structure semblable à un toit et collez-la au mur à environ 1,1 mètre.
- Fixez le module infrarouge vers le bas sur le toit en carton.
- Connectez la sortie de l'ampli-op à la broche n° 4 d'Arduino à l'aide de l'un des fils de 1,2 m de long.
- Connectez Vcc et GND de l'arduino au module IR en utilisant le reste des fils de 1,2 m de long.
- Assurez-vous que les choses sont solidement fixées, les fils au mur, le module IR au toit en carton, le module piézoélectrique au sol juste en dessous du module IR.
En cas de doute, regardez l'image jointe, elle est bien marquée pour faciliter la compréhension du montage.
Étape 7 :Détails de l'expérience
Avec toutes les choses en place (à l'exception du code Arduino, discuté à l'étape 8), passons en revue la procédure de cette expérience.
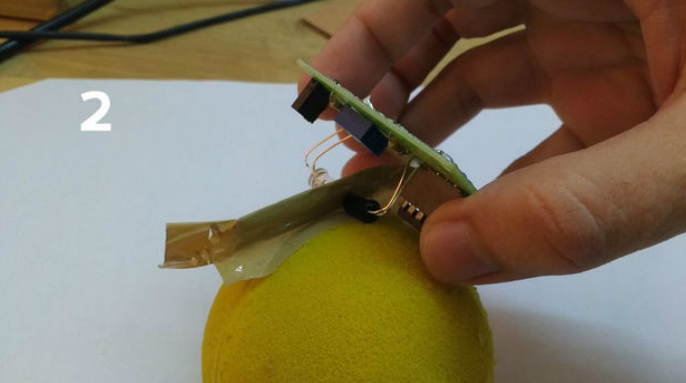
- Coller une petite projection fine sur l'objet utilisé pour la chute libre comme indiqué sur l'image numérotée 1.
- Avant de laisser notre objet poursuivre sa chute libre, maintenez-le juste à la marque de 1 mètre, de sorte que la projection sur le dessus obstrue la lumière de l'IR à la photodiode. Comme indiqué dans l'image numérotée 2.
- laisser l'objet sans exercer aucune force pour le laisser tomber librement sur la zone d'atterrissage piézoélectrique.
- Lorsqu'il tombe, il n'y a aucune obstruction sur le chemin des IR TX et RX, ce qui nous donne le signal de l'objet juste à gauche en termes de temps de départ de la chute libre.
- Lorsque l'objet touche la zone d'atterrissage, les capteurs piézoélectriques génèrent un pic de tension contrôlé notifiant l'arrivée de l'objet en termes d'heure de fin de la chute libre.
- Si nous soustrayons l'heure de fin de l'heure de début, nous obtenons le temps de vol que nous utiliserons pour calculer l'accélération due à la gravité, comme nous l'avons vu à l'étape 2.

Étape 8 :Code Arduino
Je joins le code Arduino pour cette expérience. Le code est vraiment simple. En cas de doute référez-vous à la vidéo où j'explique le code en détail (temps en vidéo =13minute 35 secs).
Étape 9 :Faisons l'expérience
Les choses suivantes doivent être prises en compte avant de faire cette expérience.
- Le seuil du capteur piézoélectrique doit être correctement défini dans le code arduino.
- Placez le panneau piézoélectrique juste en dessous du module IR.
- Assurez-vous de laisser tomber l'objet d'un mètre sans appliquer de force externe.
Ici, je fais cette expérience à l'horodatage 17 minutes dans la vidéo ci-jointe. Nous allons calculer la masse de la terre en utilisant les résultats, c'est-à-dire le temps de vol obtenu à partir de cette expérience.
Étape 10 :Résultats et masse de la Terre
Après avoir répété cette expérience 3 fois, j'ai obtenu les résultats suivants en termes de temps de vol.
- 443 ms
- 443 ms
- 464 ms
Prenons la moyenne.
Temps de vol moyen =450 ms
Si nous substituons cette valeur dans l'équation pour obtenir une accélération due à la gravité, nous obtenons une accélération d'environ 9,8755 m/s2. Comme on le voit dans l'image ci-jointe.
Enfin, en remplaçant cette valeur de « g » pour obtenir la masse de la terre, nous obtenons qu'elle soit d'environ 6,0066 x 1024 kg, comme vous pouvez le voir sur l'image ci-jointe.
La masse réelle de la Terre selon google est de 5,972 x 1024 kg. Je pense que nous nous sommes rapprochés.
Merci pour votre temps, En cas de doute, référez-vous à la vidéo ou mettez-la dans les commentaires, je serai heureux de vous aider.

Code
- Code Arduino
Code ArduinoArduino
code arduino simpleconst int sensorPin1 =A0;const int sensorPin2 =A1;const int sensorPin3 =A2;const int sensorPin4 =A3;const int photoPin =4;const int ledPin =13;const int seuil =110;char stringToPrint [100];int startTime,endTime;int val1,val2,val3,val4;void setup() { Serial.begin(115200); // mettez votre code de configuration ici, à exécuter une fois :pinMode(ledPin,OUTPUT); pinMode(sensorPin1, INPUT); pinMode(sensorPin2, INPUT); pinMode (sensorPin3, INPUT); pinMode (sensorPin4, INPUT); pinMode(photoPin,INPUT);}void loop() { // mettez votre code principal ici, pour l'exécuter à plusieurs reprises :int start =digitalRead(photoPin); startTime =millis(); if(start ==HIGH) digitalWrite(ledPin,HIGH); while(start ==LOW) { digitalWrite(ledPin,LOW); val1 =analogRead(sensorPin1) ; val2 =analogRead(sensorPin2) ; val3 =analogRead(sensorPin3) ; val4 =analogRead(sensorPin4) ; //sprintf(stringToPrint,"%d,%d,%d,%d",val1,val2,val3,val4) ; //Serial.println(stringToPrint); if((val1>=seuil) || (val2>=seuil) || (val3>=seuil) || (val4>=seuil)) { endTime =millis(); sprintf(stringToPrint,"%d ms",endTime - startTime); Serial.println(stringToPrint); digitalWrite (ledPin, HAUT); retard(1000); digitalWrite (ledPin, LOW); début =HAUT ; } }} Schémas
schéma de frittage pour circuit IR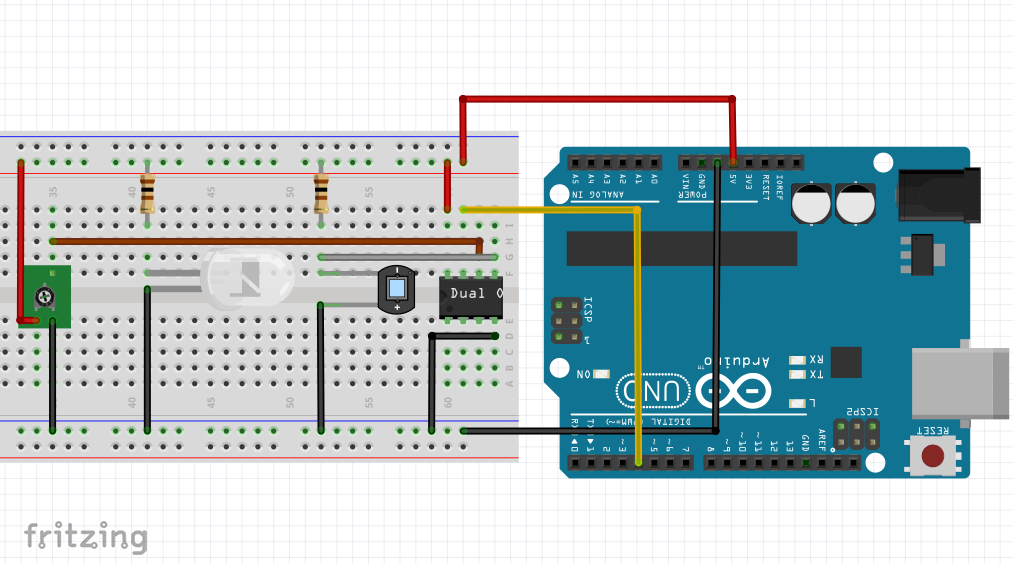 image matérielle
image matérielle 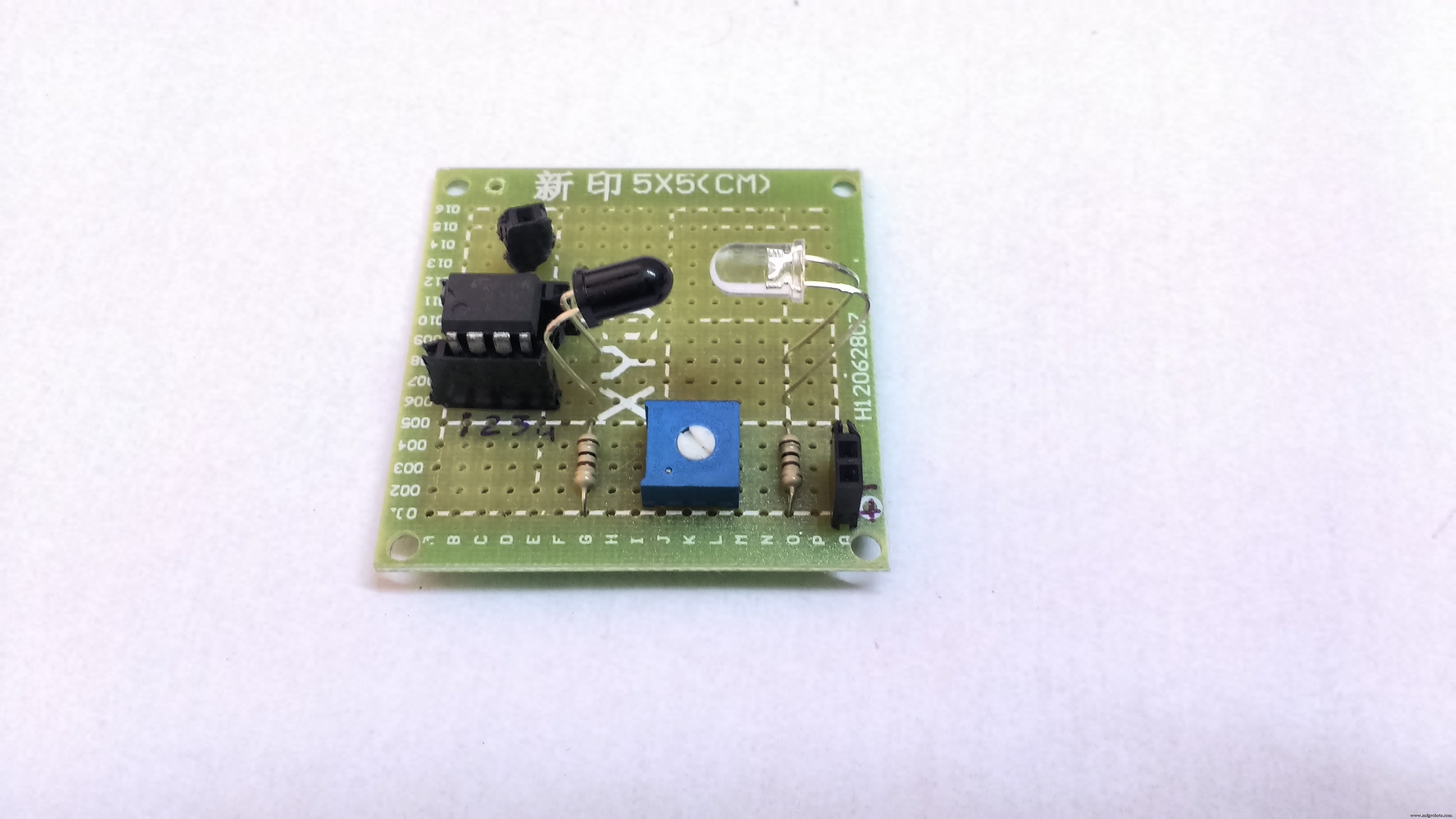 schéma de frittage
schéma de frittage 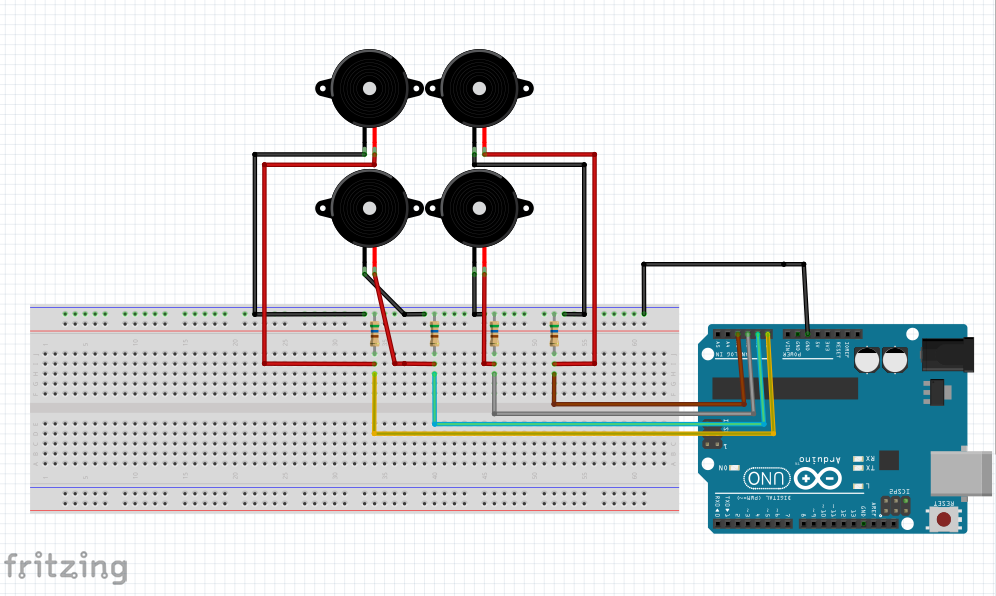 image matérielle
image matérielle 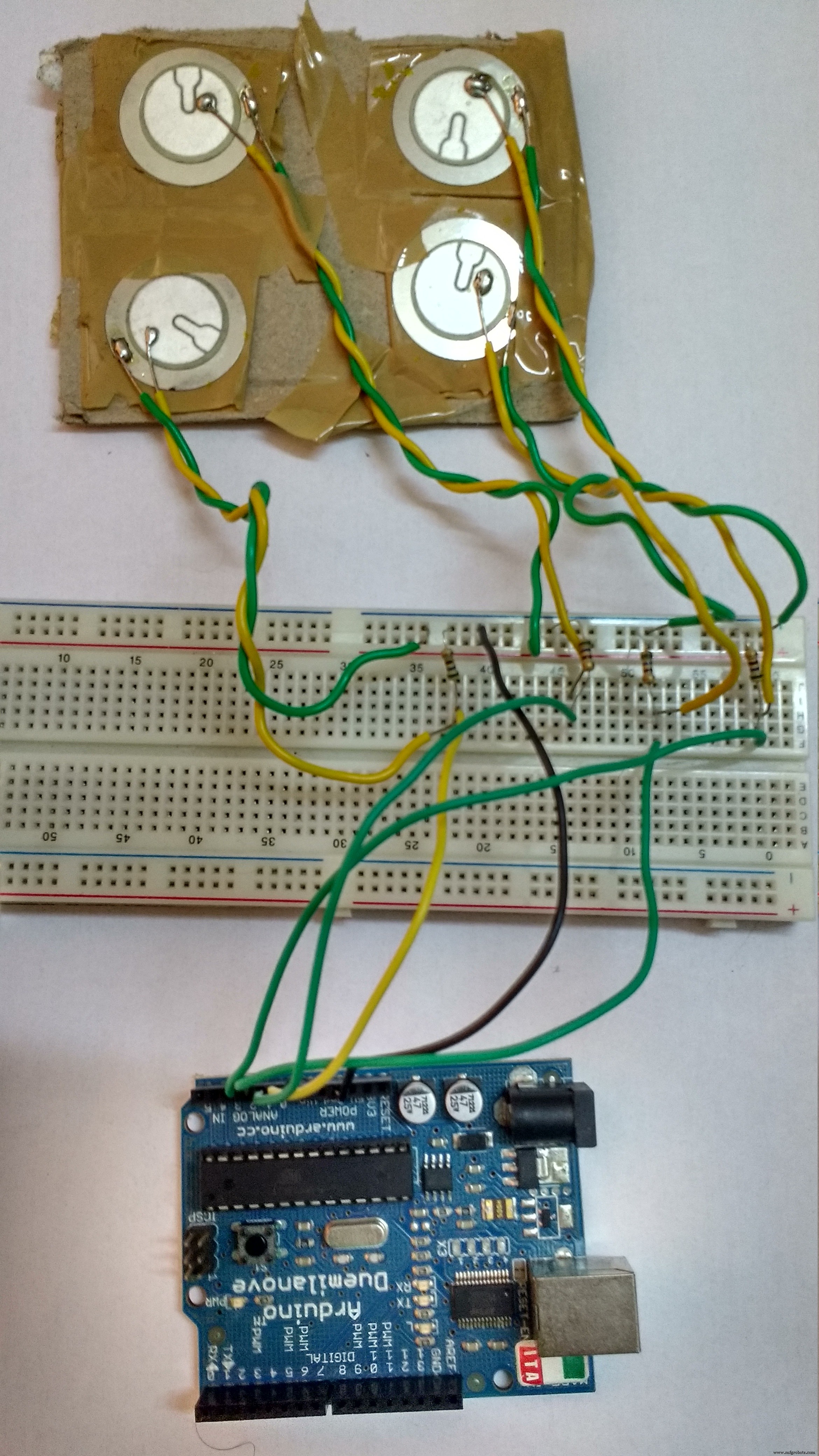
Processus de fabrication
- Comment mesurer la qualité de l'air sur OpenSensors
- Variation des lumières avec PWM à l'aide du bouton-poussoir
- Machine à LÉVITATION ULTRASONIQUE utilisant ARDUINO
- Mesure de la fréquence et du cycle de service à l'aide d'Arduino
- Trouvez-moi
- Sonar utilisant arduino et affichage lors du traitement de l'IDE
- Compteur de voitures utilisant Arduino + Traitement + PHP
- Utilisation du capteur cardiaque portable MAX30100 avec Arduino
- Comment mesurer la maturité digitale de mon entreprise ?