


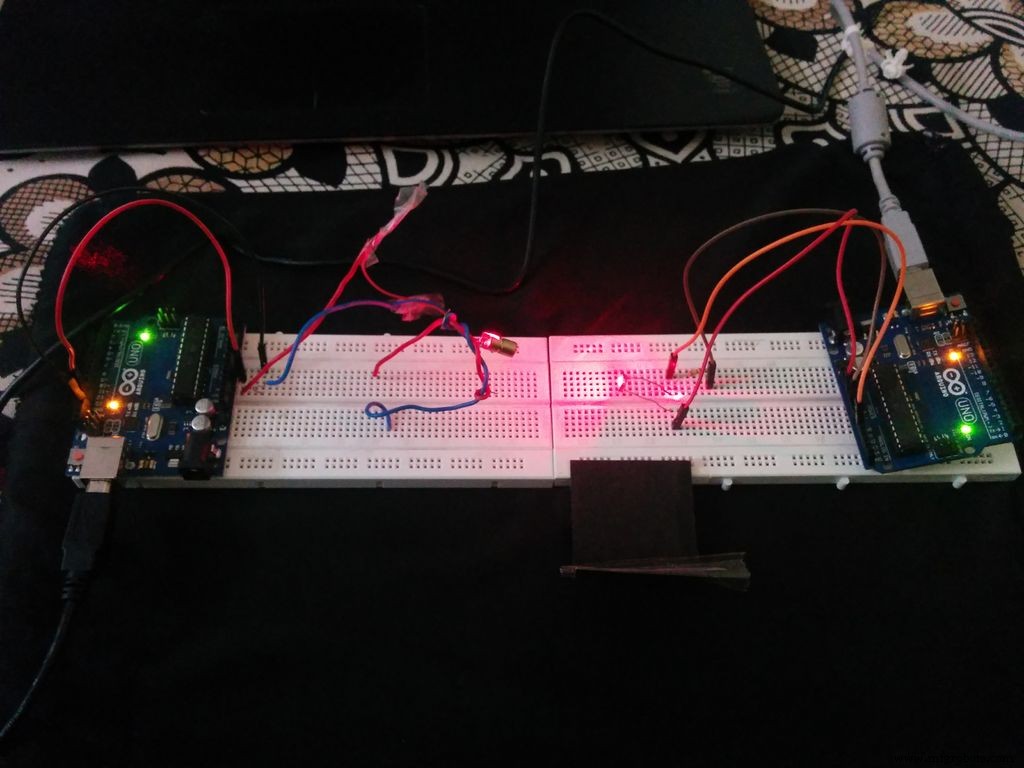
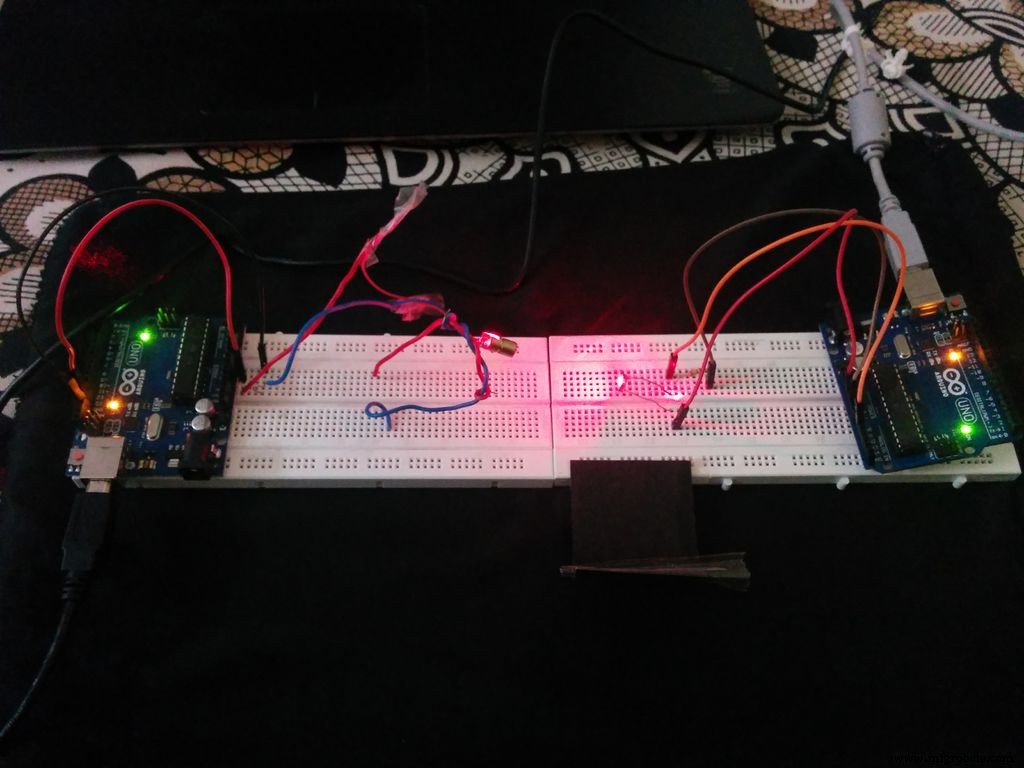
Communication en code Morse à l'aide du module laser (les deux)
Composants et fournitures
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Code Morse
Le code Morse signifie convertir les symboles alphanumériques (c'est-à-dire les alphabets et les chiffres) en points et en tirets. Chaque symbole a une disposition différente de points et de tirets qui les rend uniques. Le code Morse est utilisé pour envoyer les données secrètes ou les données codées. Dans ce projet, j'ai créé la section émetteur et récepteur de la communication en code Morse. L'unicité de ce projet par rapport aux différents projets de communication en code Morse est que l'algorithme de la section du récepteur est vraiment simple que tout autre algorithme.
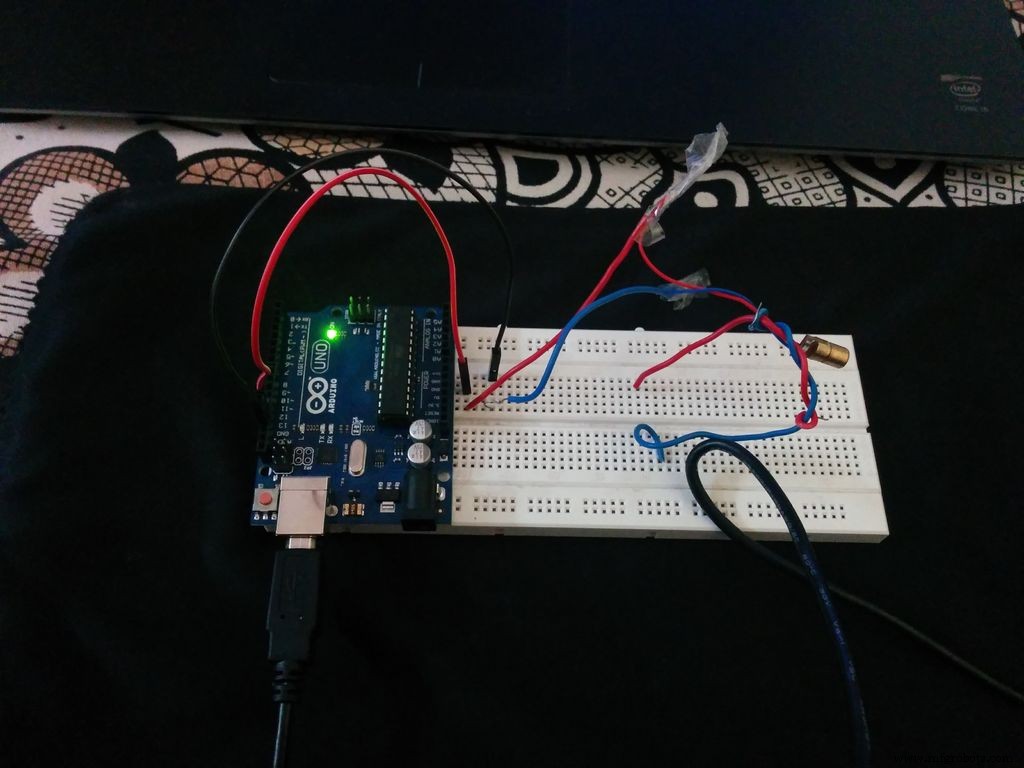
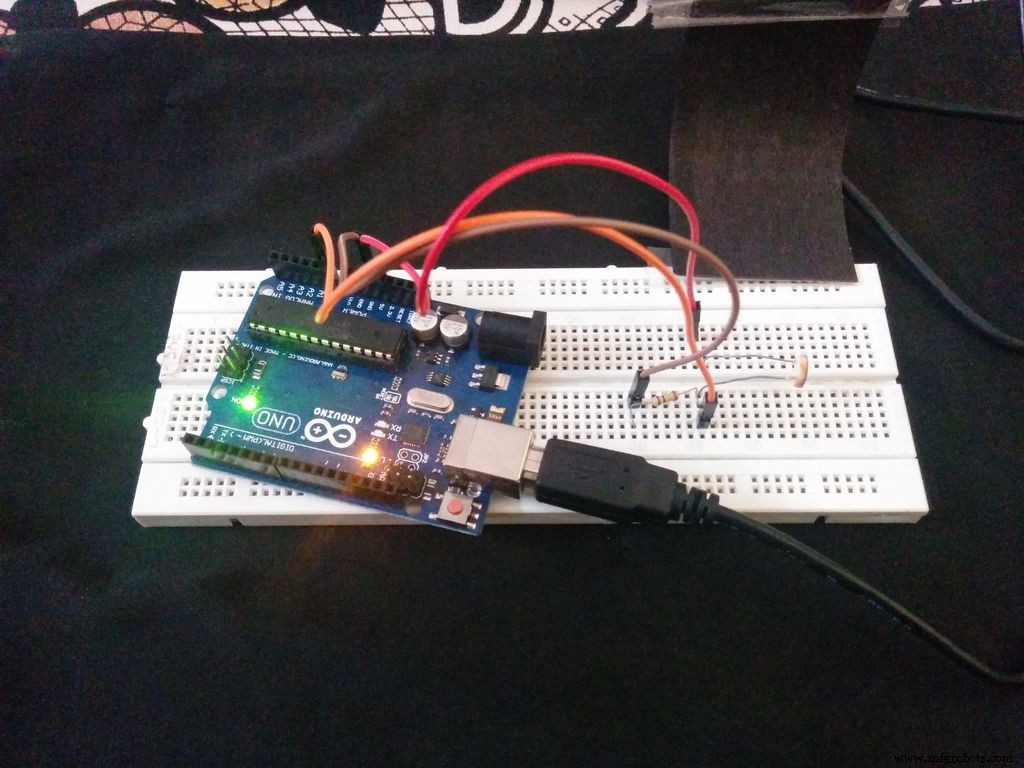
Étape 1 : section de l'émetteur
La section émetteur est utilisée pour envoyer les données d'entrée via LASER.
Matériel requis :-
- Arduino Uno
- Émetteur t LASER
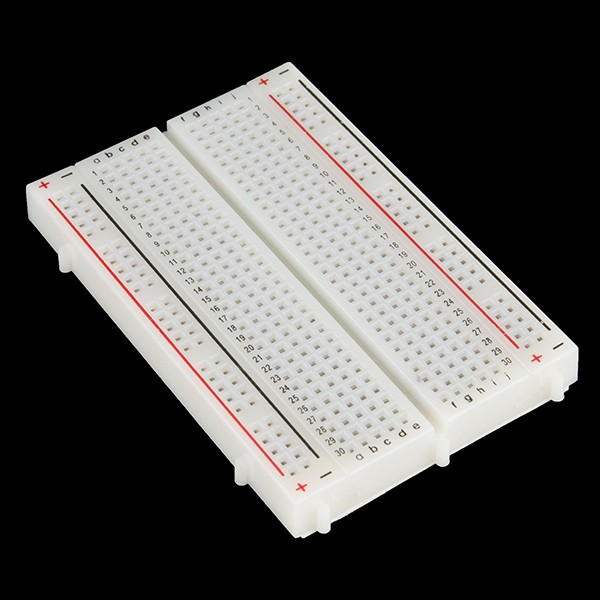
- Planche à pain
- Cavaliers
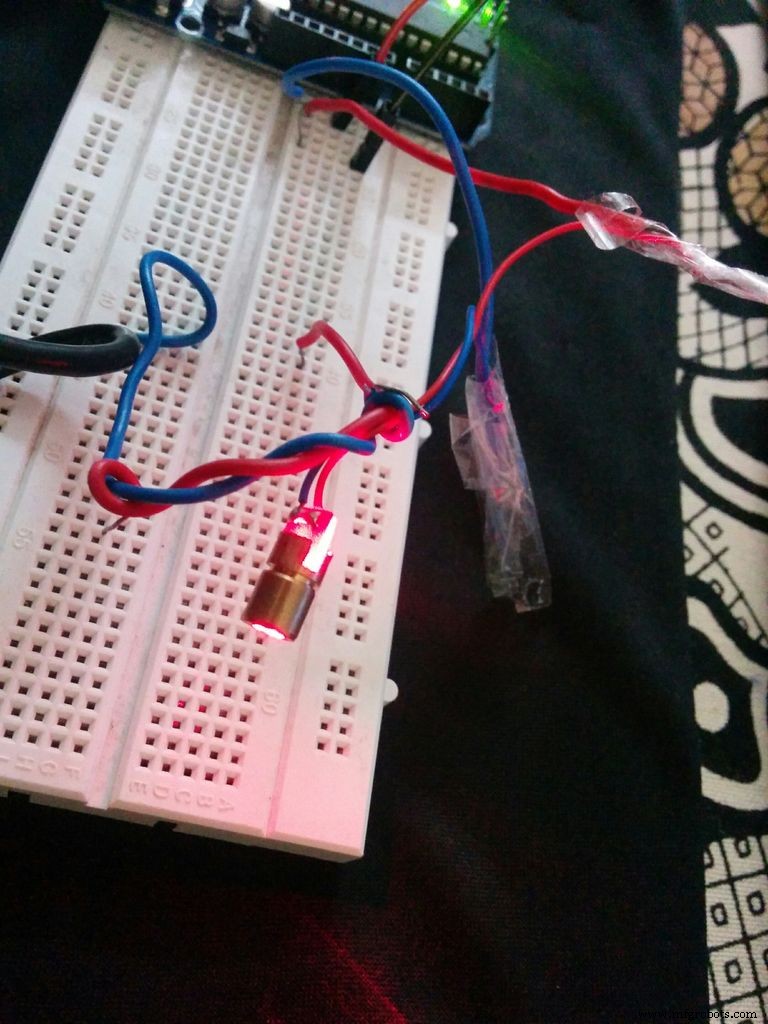
Connexions :-
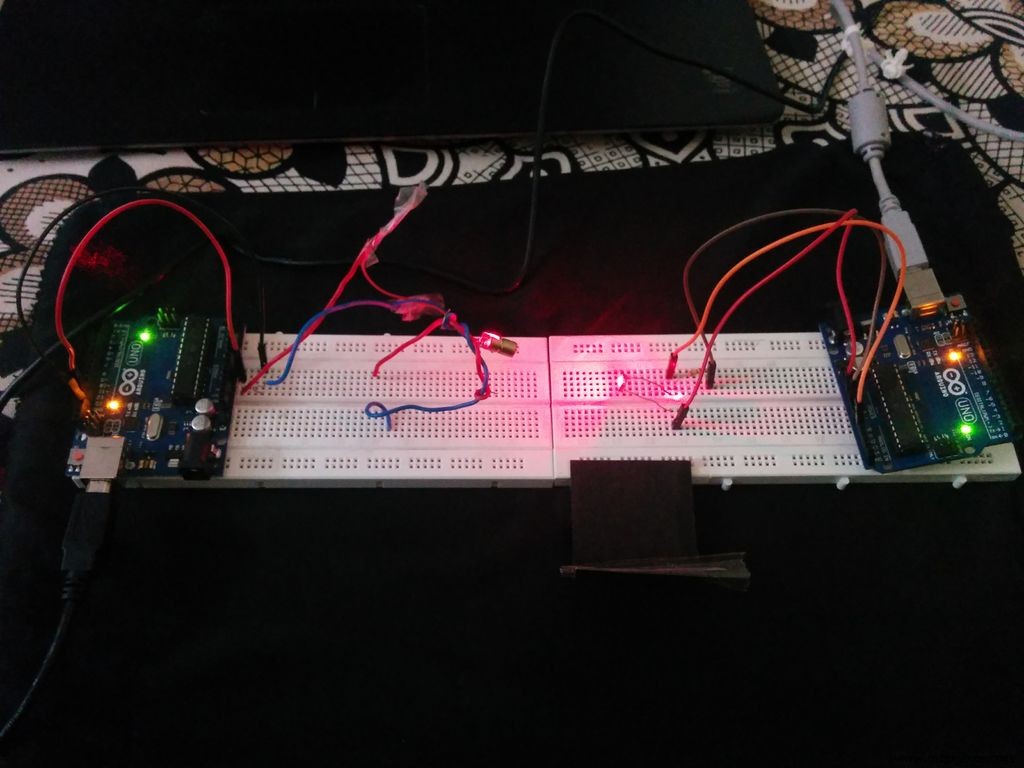
Connectez la broche positive du LASER avec la 13ème broche de l'entrée numérique dans Arduino (comme programmé dans le code). Connectez le GND de LASER avec le GND d'Arduino.
Programme :-
L'algorithme du code est le suivant :-
- 1. Les données qui doivent être transmises sont conservées en entrée et stockées par un tableau de caractères.
- 2. La broche LED qui doit être transmise est définie.
- 3. La vitesse du code Morse est définie.
- 4. Les points et les tirets sont définis.
- 5. Le caractère saisi est vérifié via le boîtier du commutateur et les valeurs HIGH et LOW correspondantes du LASER sont transmises.
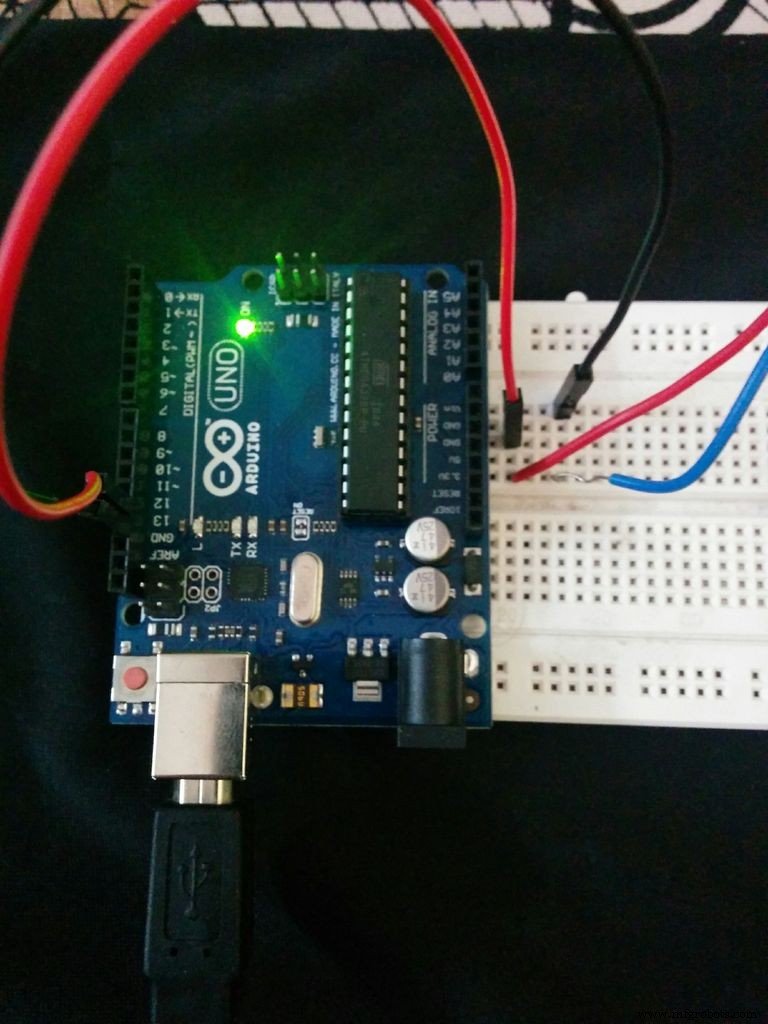
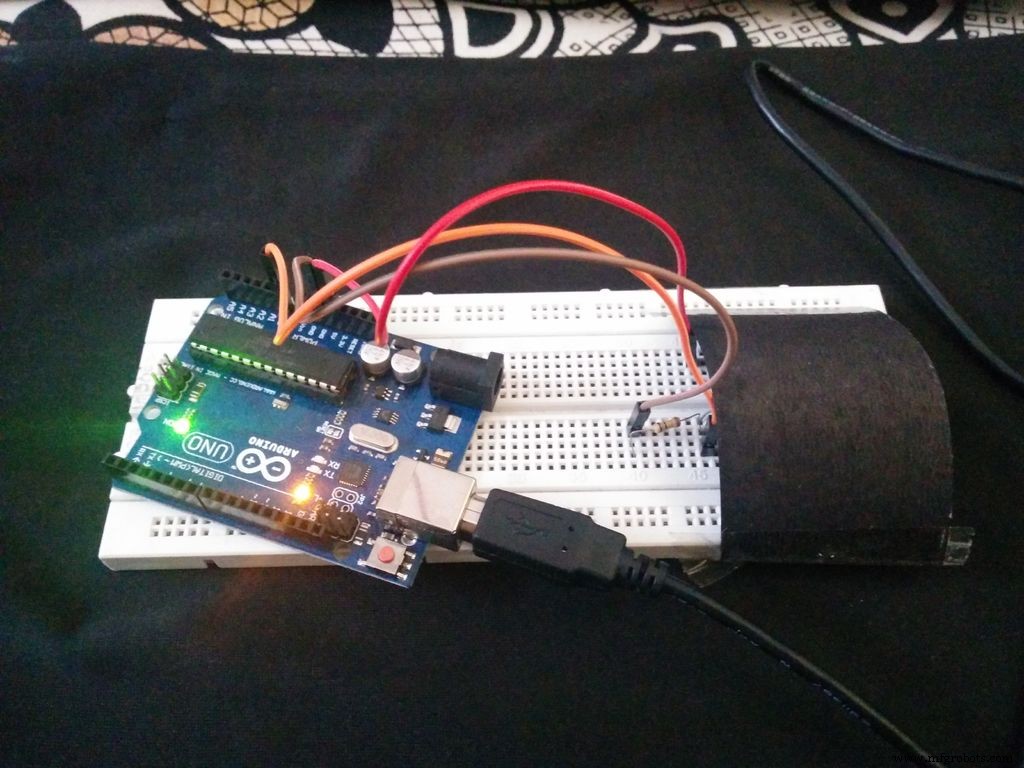
Étape 2 : section du récepteur
Les données codées qui sont envoyées par l'émetteur sont reçues et traitées, après quoi elles sont affichées sur Serial Monitor.
Matériel requis :-
- 1. Arduino Uno
- 2. LDR
- 3. Résistance - 10 K ohm
- 4. Planche à pain
- 5. Cavaliers
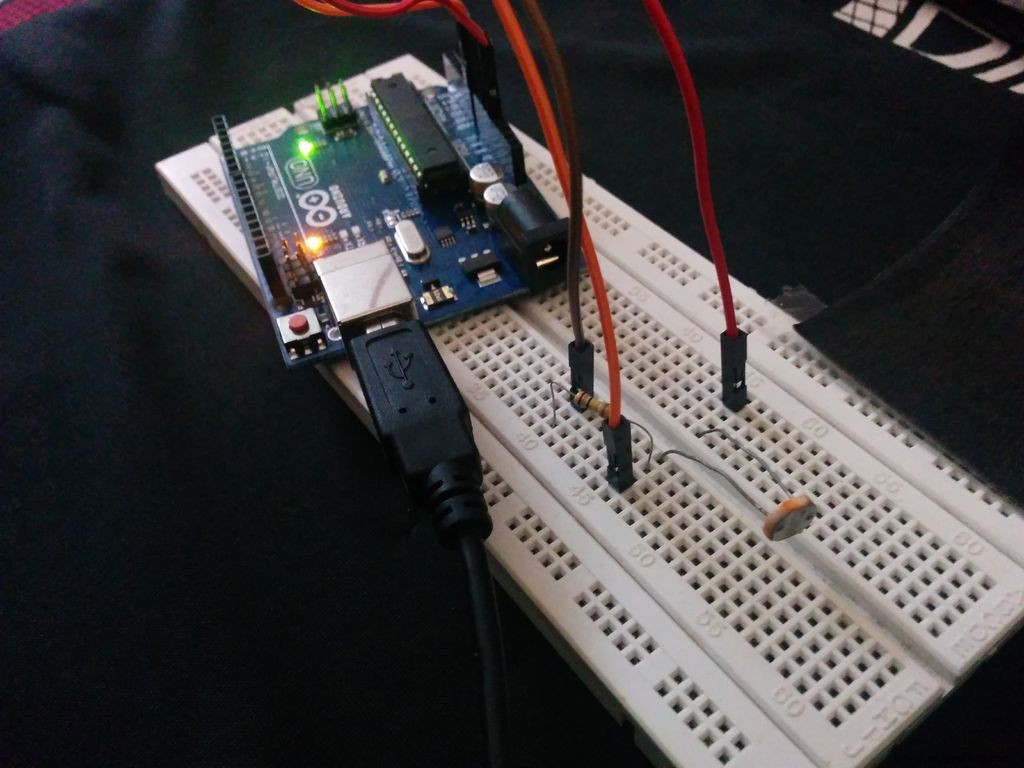
Connexions :-
Connectez une extrémité du LDR avec 5V d'alimentation Arduino. Connectez l'autre extrémité du LDR avec une résistance de 10K ohm ainsi qu'avec l'entrée analogique A0. Connectez l'autre extrémité de la résistance avec GND de l'Arduino.
Programme :-
L'algorithme utilisé dans la section récepteur est l'algorithme le plus simple que tout autre disponible sur Internet. Cet algorithme regorge d'observations.
- 1. Lorsqu'aucun LASER ne tombe sur le LDR, la valeur du LDR sera inférieure à 1000. Si la valeur dépasse 1000 même si le LASER est allumé sur le LDR, vous devez alors couvrir le LDR pour vous protéger des lumière qui y pénètre. Ici, le LDR est recouvert d'un dôme en papier noir.
- 2. Lorsque le LASER tombe sur le LDR, la valeur dépasse 1000, puis il entrera dans une boucle.
- 3. Maintenant, quantifiez les valeurs, c'est-à-dire si la valeur va au-delà de 1000, attribuez-la à "1", sinon attribuez-la à "0".
- 4. À l'intérieur d'une boucle, calculez le nombre de "1" et de "0". Réglez les compteurs 'a' et 'f'. Comptez le nombre de '1' et stockez-le dans 'a' et de même comptez le nombre de '0's et stockez-le dans 'f' respectivement.
- 5. Vérifiez maintenant les valeurs spécifiques de 'a' et 'f' respectivement. Chaque caractère aura un ensemble différent de 'a' et 'f'. La valeur correspondante sera affichée.
Limitation :-
Le programme qui est attaché au code est utilisé pour imprimer les caractères spécifiques. Vous pouvez améliorer davantage le code en utilisant des combinaisons et afficher tous les jeux de caractères. L'objectif principal du code est de vous faire comprendre l'algorithme et son fonctionnement.
Code
- CODE-1- POUR LE CONTRLE DE L'ÉMETTEUR LASER
- CODE-2 - POUR LA FIN DU RÉCEPTEUR
CODE-1- POUR CONTROLER L'EMETTEUR LASERArduino
int led13 =13 ; // fait clignoter une led sur la sortie 13/* Réglez la vitesse de votre code morse Voici les éléments de code des ratios :Longueur du tiret =Longueur du point x 3 Pause entre les éléments =Longueur du point */int dotLen =200; // longueur du code morse 'dot'int dashLen =dotLen * 3; // longueur du code morse 'tiret'int elemPause =dotLen;// longueur de la pause entre les éléments d'un caractèreint Spaces =dotLen * 3; // longueur des espaces entre les caractèresint wordPause =dotLen * 7; // longueur de la pause entre les mots void setup() { // initialise la broche numérique en tant que sortie pour les lumières LED. pinMode(led13, SORTIE); }// Créez une boucle des lettres/mots que vous souhaitez afficher en code morse (défini dans la chaîne en haut du code) void loop(){ // Boucle dans la chaîne et récupère chaque caractère un à la fois jusqu'à la fin atteint pour (int i =0; i CODE-2 - POUR L'EXTRÉMITÉ DU RÉCEPTEURArduino
int sensorPin =0 ; // sélectionnez la broche d'entrée pour ldrint sensorValue =0; // variable pour stocker la valeur provenant du sensorint a, f; // flagsvoid setup() {Serial.begin(9600); //définit le port série pour la communication}boucle vide() {sensorValue =analogRead(sensorPin); // lire la valeur du capteur//Serial.println(sensorValue);if(sensorValue>1000)// calculer le nombre de points et de tirets{ for(int i=0;i<=13;i++) { sensorValue=analogRead (sensorPin); if(sensorValue>1000) { a++; //calcul du nombre de points et de tirets dans le délai de caractères (200); } else { f++; // calcul du nombre d'espaces dans les points et les tirets delay(200); } }}//Serial.print("a="+a);//Serial.println("f="+f);//Serial.println();/* * Vérification de l'ensemble des points, tirets et espaces */if(a==4 &&f==10){ Serial.print("a");}if(a==6 &&f==8){ Serial.print("b");}if (a==8 &&f==6){ Serial.print("c"); }if(a==1 &&f==13){ Serial.print("e");}if(a==2 &&f==12){ Serial.print("i");}if(a ==10 &&f==4){ Serial.print("j");}if(a==7 &&f==7){ Serial.print("g");}if(a==9 &&f==5){ Serial.print("o");}if(a==3 &&f==11){ Serial.print("s");}f=a=0;delay(200); } Pièces et boîtiers personnalisés
Schémas
Processus de fabrication
- Guide du marquage laser
- Pointeur laser
- Laser à semi-conducteur
- Scanner de code-barres
- Missile à guidage laser
- Projecteur laser interactif utilisant des capteurs Zigbee
- Communication entre cartes
- Robot à commande gestuelle utilisant Raspberry Pi
- 4 avantages de l'utilisation du Low Code dans la fabrication industrielle