


Chars laser Leap Motion !
Composants et fournitures
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
À propos de ce projet
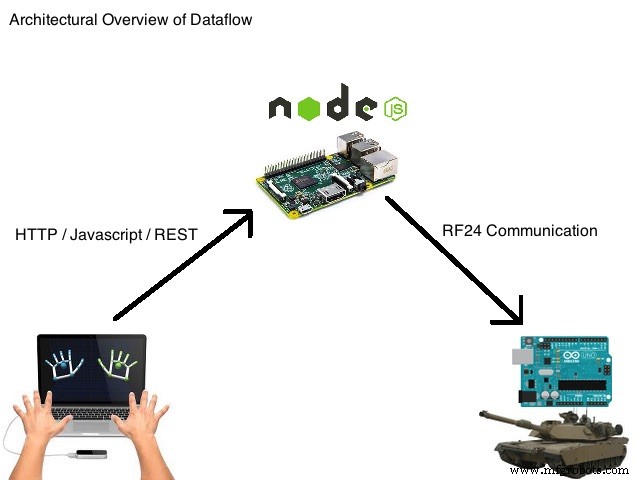
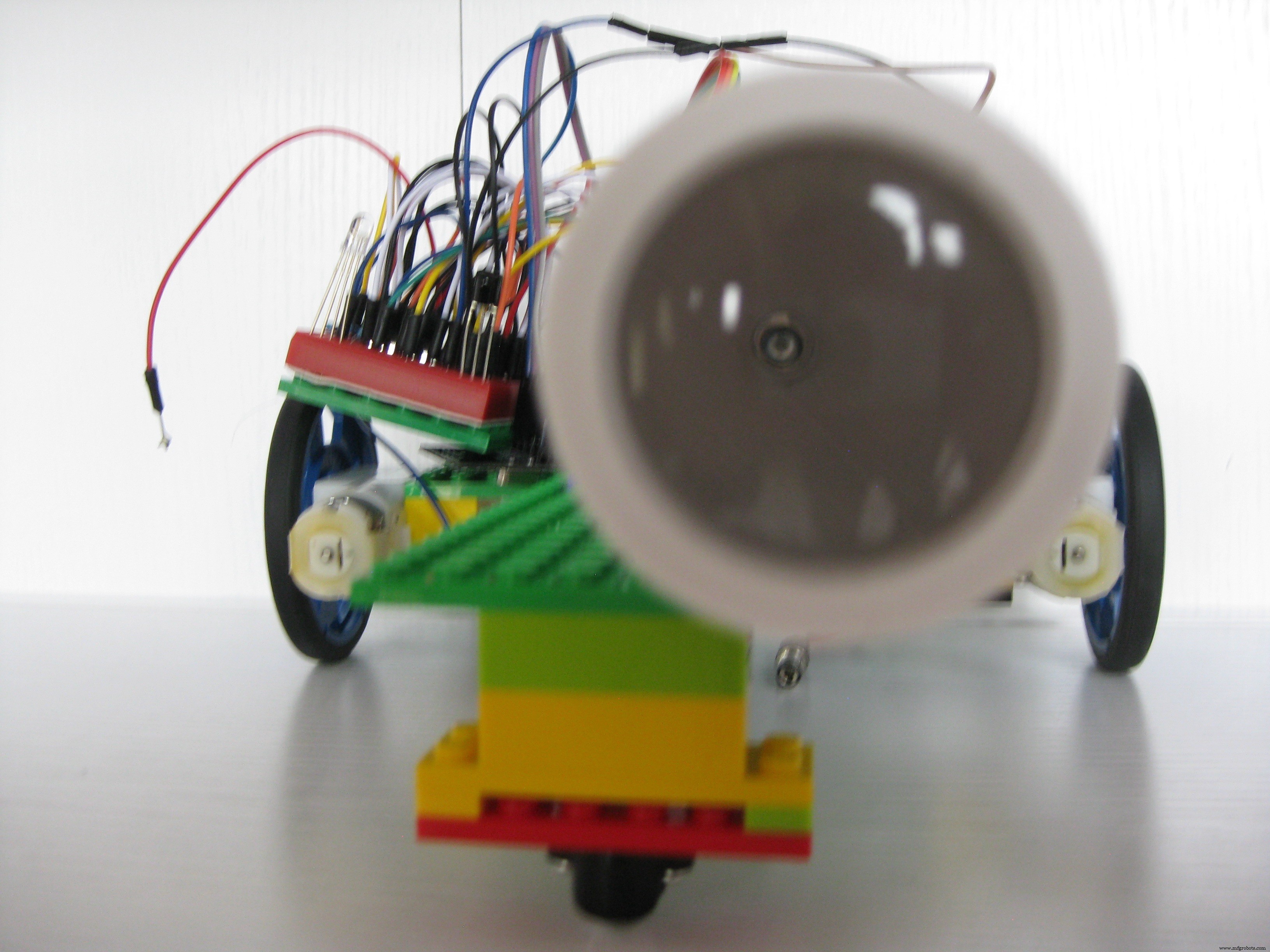
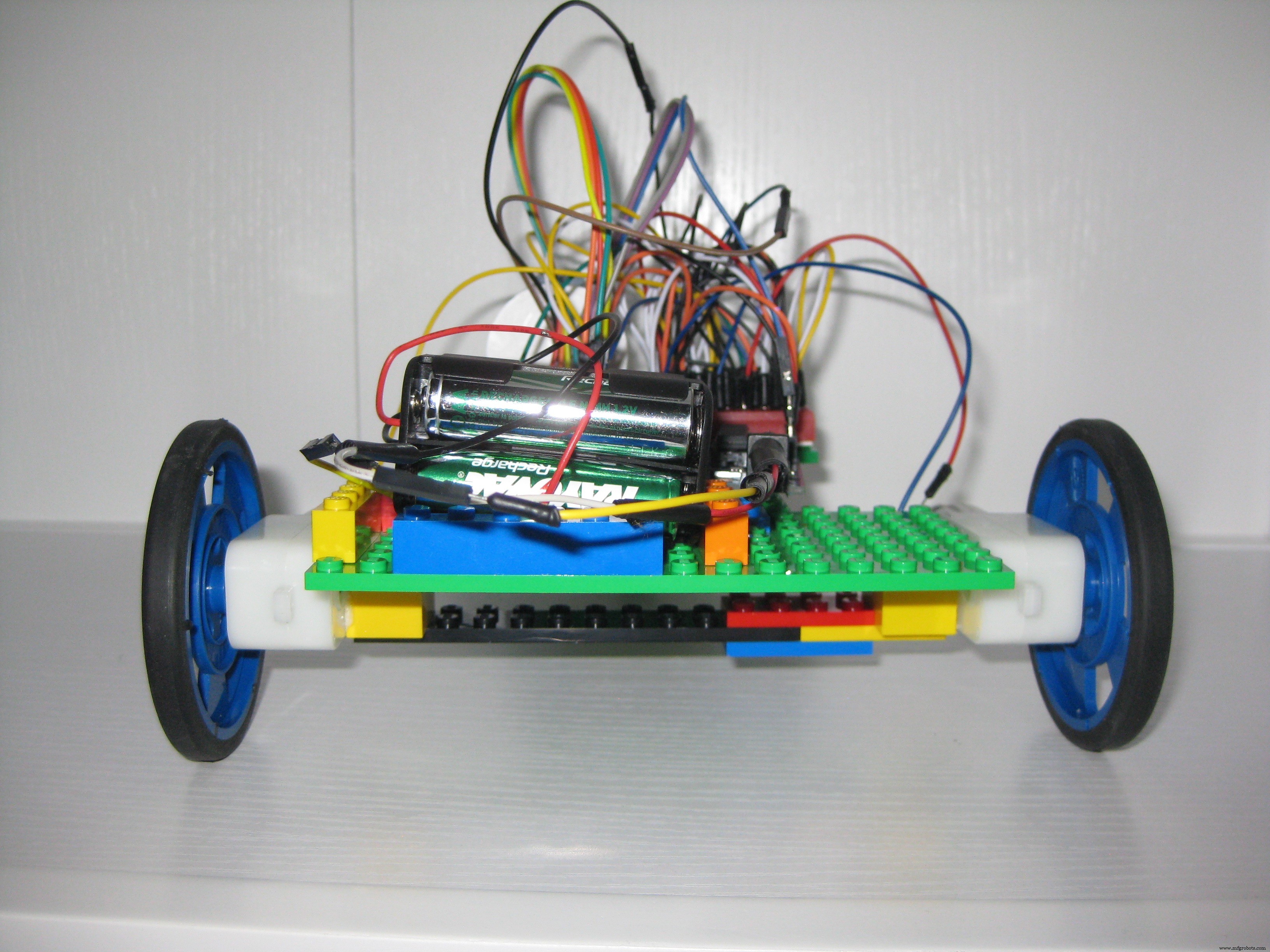
L'objectif de ce projet était de créer un ensemble de chars robotisés pour combattre où les opérateurs ont une sensation plus réaliste pour contrôler les véhicules à l'aide du contrôleur Leap Motion. Je voulais créer les réservoirs du robot à moindre coût, afin que les gens puissent reproduire le projet aussi facilement que possible.
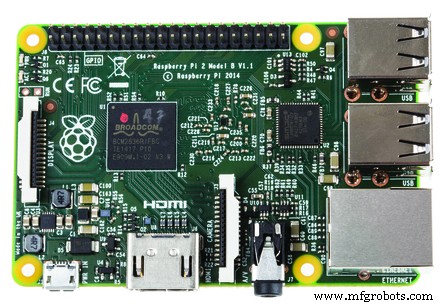
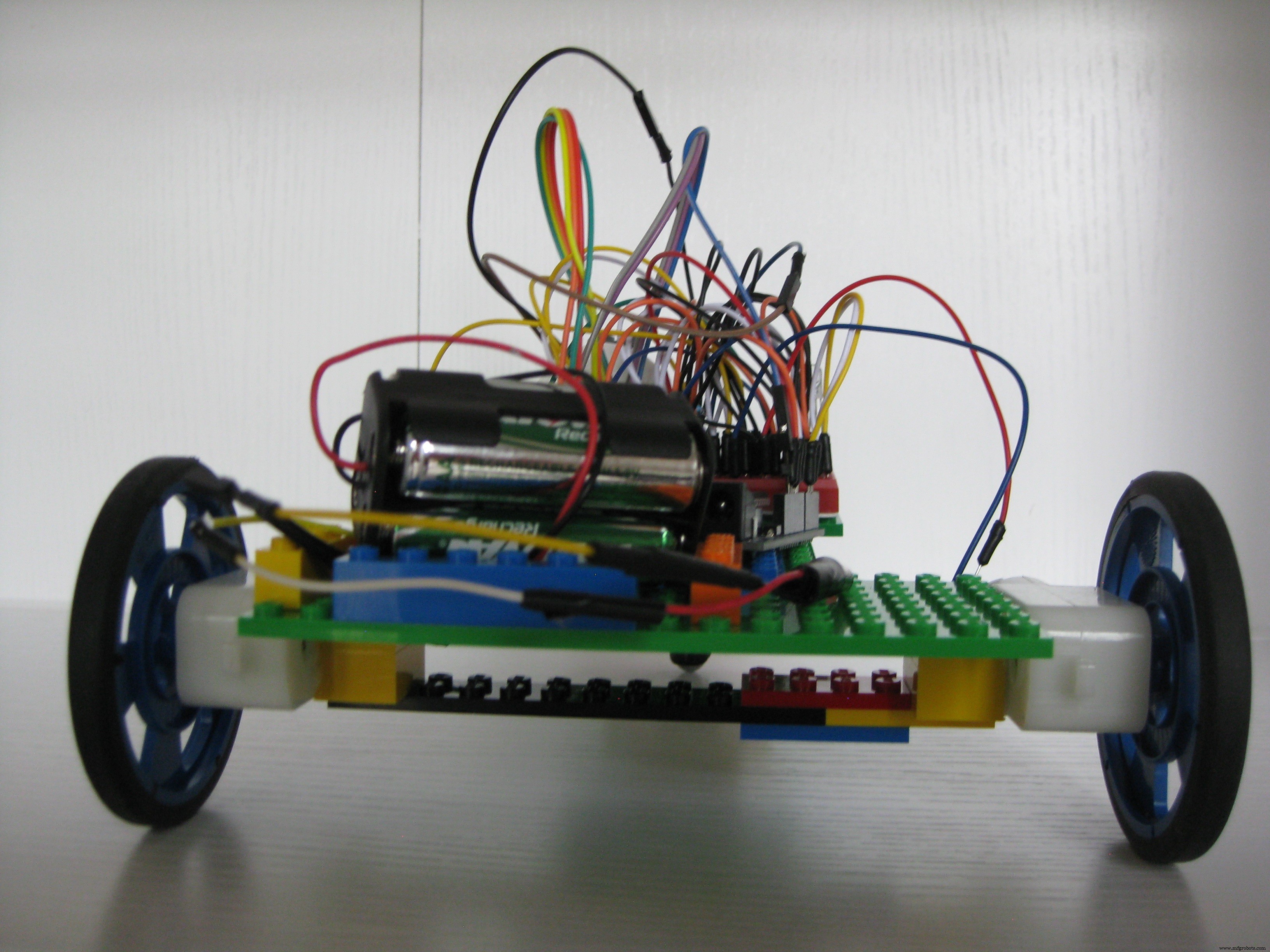
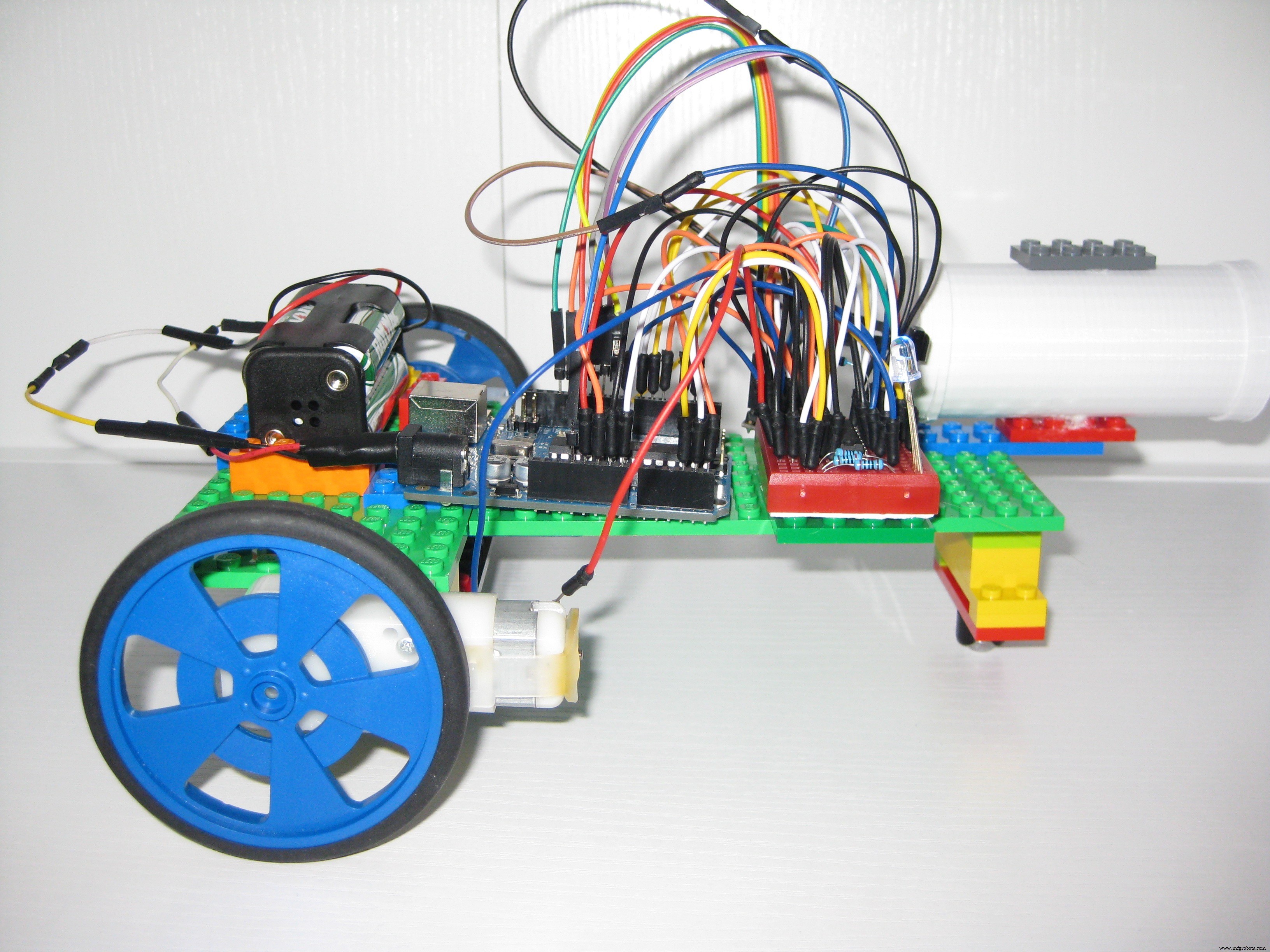
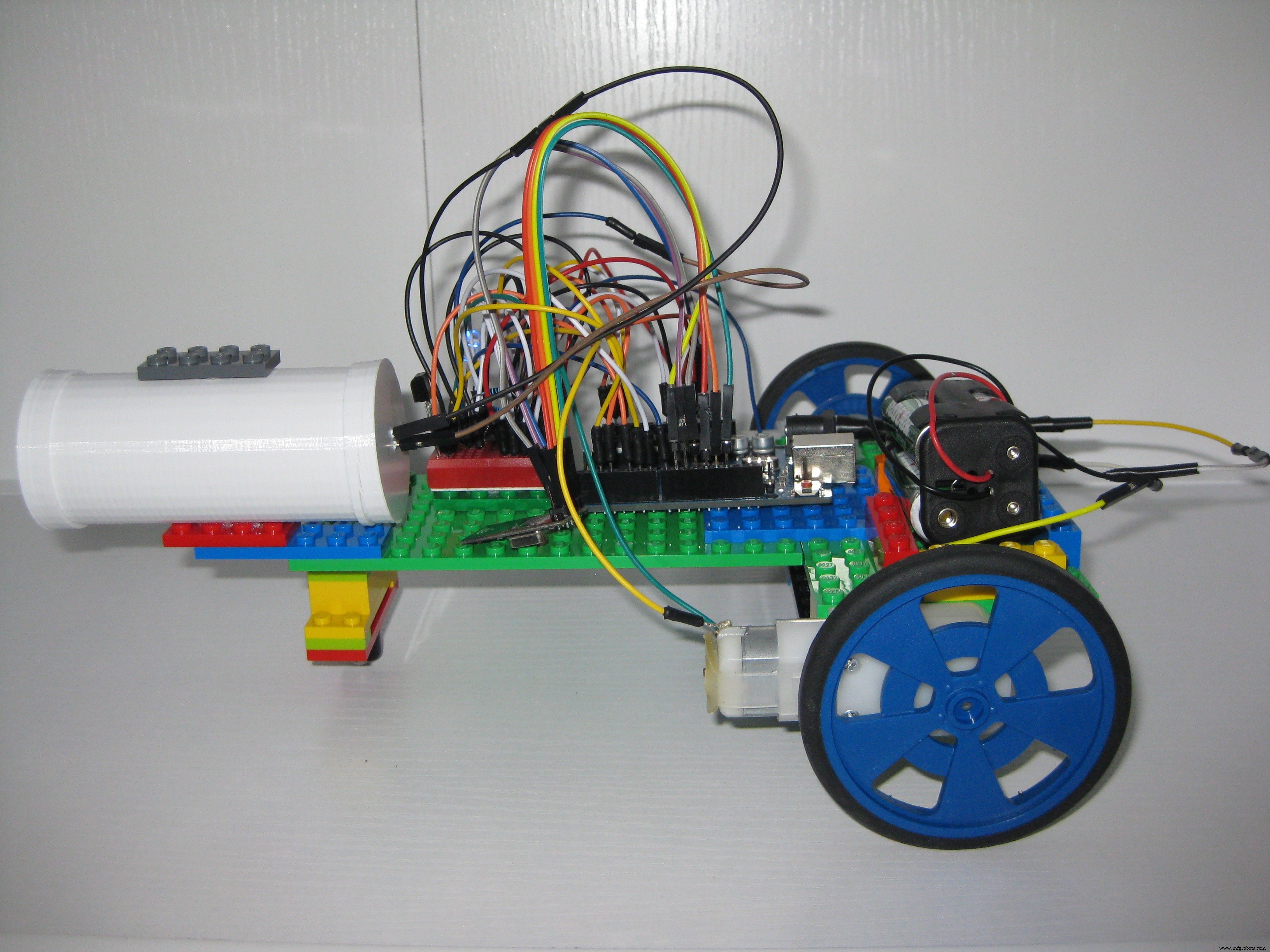
Le corps du réservoir est composé de briques et de plaques Lego génériques. La source d'alimentation est un simple bloc de 4 piles rechargeables AA. Le contrôleur du réservoir est un Arduino Uno R3. "Propulsion" est deux moteurs à courant continu simples avec des roues à l'arrière avec une seule roulette à l'avant utilisant un seul circuit intégré L293D. L'"arme" est une seule lumière LED IR et l'"armure" est un ensemble de capteurs IR qui détectent les coups des chars adverses à LED IR. L'"affichage tête haute" est une seule LED multicolore qui vous indique toutes les actions se produisant sur le char, y compris l'état de votre blindage. Enfin, le "contrôle" du réservoir est géré sans fil via un Raspberry Pi 2 exécutant NodeJS connecté via un module sans fil RF24 dont chaque réservoir est également équipé.
À l'aide des mains de l'opérateur, le Leap Motion contrôle le réservoir à l'aide du SDK Javascript Leap Motion. En utilisant le SDK pour détecter les mouvements de la main, javascript communique avec le serveur NodeJS sur le Raspberry PI 2, qui à son tour communique avec le tank via le module RF24. Les deux mains en avant, le char avance. Les deux mains en arrière, le char recule. Main gauche en avant, main droite en arrière, le char tourne à droite. Main droite en avant, main gauche en arrière, le char tourne à gauche. Les deux mains en position "neutre" arrêteront le réservoir. Une main vers l'avant (gauche ou droite) tout en laissant tomber l'autre main fera "tirer" l'arme du char.
Voici une démonstration rapide de l'arme, de l'armure et de l'affichage tête haute des chars.
Utilisant l'armure avancée omnidirectionnelle et les boîtes en carton comme abri, les chars laser deviennent un jeu de chasse et d'évasion.
Étapes de configuration du projet :
1) Assemblez les réservoirs et câblez-les en utilisant les schémas ci-dessous. Téléchargez les bibliothèques Arduin nécessaires (voir README dans le référentiel github), compilez et téléchargez le croquis de l'arduino pour tank1 dans un tank et tank2 dans l'autre tank.
2) Câblez l'émetteur-récepteur RF24 au Raspberry Pi. Installez Raspbian OS et node JS sur le Pi.
3) Téléchargez, configurez et construisez (voir README dans le référentiel github) la bibliothèque RF24 sur le Pi.
4) Téléchargez le logiciel du serveur NodeJS depuis le site github, configurez et démarrez le serveur d'applications/serveur Web (voir README dans githubrepository).
5) Installez le Leap Motion et les pilotes sur votre ordinateur. Ouvrez un navigateur et chargez l'URL vers le serveur Raspberry Pi Rest/Web pour charger la page Web (voir README dans le référentiel github) pour contrôler le tank un ou tanktwo.
6) Cliquez sur le bouton d'étalonnage et maintenez vos mains au-dessus du mouvement de saut afin qu'il détecte les deux mains et connaisse votre position neutre. Une fois l'étalonnage terminé, vous pouvez contrôler le réservoir avec vos mains.
Note rapide sur le châssis du réservoir :
Le corps des chars est assemblé à partir de simples legos "collés de gorilles" à des pièces (moteurs, planches à pain, etc.) du char pour aider à le maintenir ensemble. Voici un diaporama pour montrer comment cela a été fait.


Une note rapide sur les LED infrarouges :
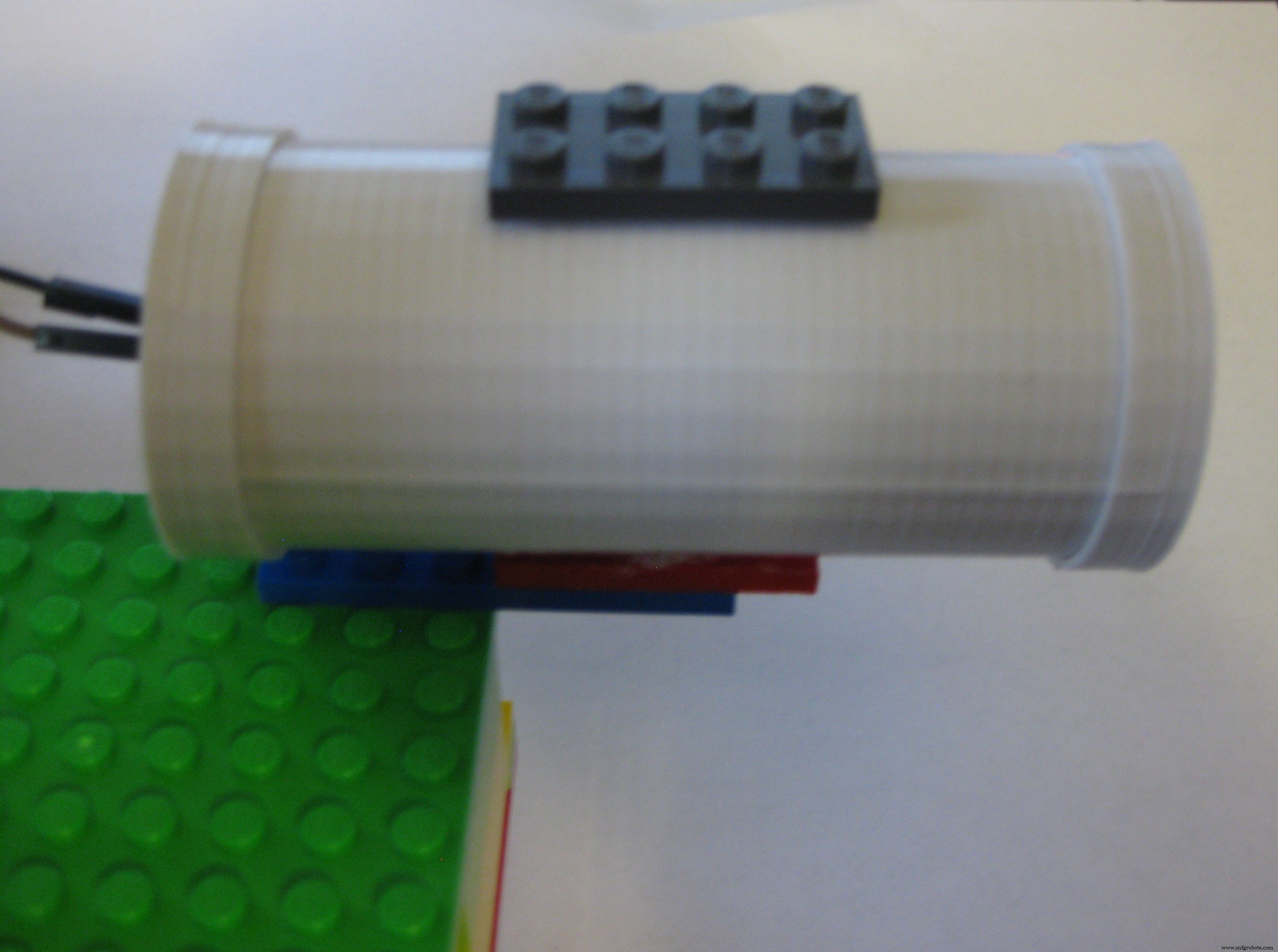
Les télécommandes infrarouges sont très fonctionnelles lorsque vous souhaitez vous asseoir sur le canapé, le sol ou la chaise et pouvoir changer de chaîne sur votre téléviseur de n'importe où. Les LED infrarouges sont conçues pour que le faisceau lumineux aille dans autant de directions que possible afin d'améliorer la couverture. Mais, si vous voulez contrôler le faisceau de la LED pour qu'il soit plus petit pour qu'il soit plus difficile de toucher le capteur à distance (comme dans un jeu de bataille de chars), c'est un peu plus difficile. Dans ma lecture, j'ai découvert qu'en utilisant une très simple loupe au bout d'un tube, vous pouvez focaliser le faisceau infrarouge. Voici un schéma montrant de quoi je parle :
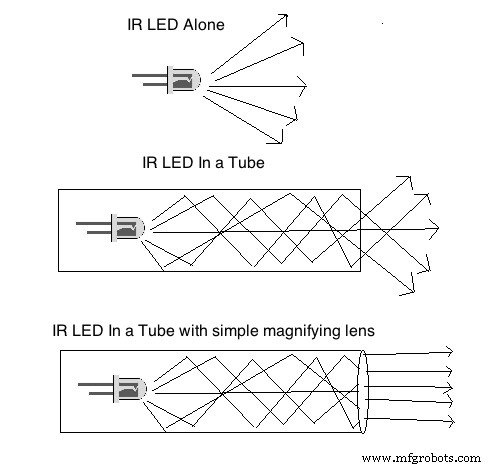
J'ai fini par acheter une loupe de poche très bon marché dans une pharmacie, en retirant la lentille et en construisant un tube autour d'elle et en ayant la LED infrarouge à l'autre extrémité du tube, et cela a parfaitement fonctionné pour rétrécir le faisceau du LED IR pour être plus précis.
Une note rapide sur 360 degrés de capteurs infrarouges
Un capteur infrarouge est capable de détecter les signaux d'une LED infrarouge lorsque cette LED est directement devant elle ou à environ 90 degrés de mise au point. Si une LED infrarouge se trouve derrière le capteur, elle ne pourra pas détecter le signal envoyé.
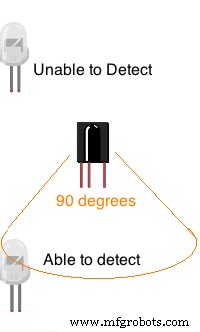
Afin d'obtenir un angle de détection complet de 360 degrés, vous deviez soit modifier la bibliothèque infrarouge pour détecter les signaux sur 4 broches différentes provenant de 4 capteurs différents, soit créer une solution matérielle permettant de connecter 4 capteurs en guirlande pour générer un rapport sur un seul épingler. J'ai trouvé des articles en ligne qui montraient comment vous pouvez y parvenir avec un simple circuit intégré ET pour connecter 4 capteurs à une seule broche d'entrée. Lorsque l'un des capteurs infrarouges a détecté un signal infrarouge, il l'a signalé sur cette broche. Cela a permis d'obtenir 360 degrés de détection, sans avoir besoin de modifier la bibliothèque infrarouge, ou d'utiliser jusqu'à 4 broches d'entrée.

Code
Github de réservoirs laser
Tous les fichiers de code personnalisés pour le projet Leap Motion Laser Tankshttps://github.com/corky/LaserTanksSchémas
À l'aide d'une LED infrarouge, le char tire des "codes" que les autres chars identifient comme des coups.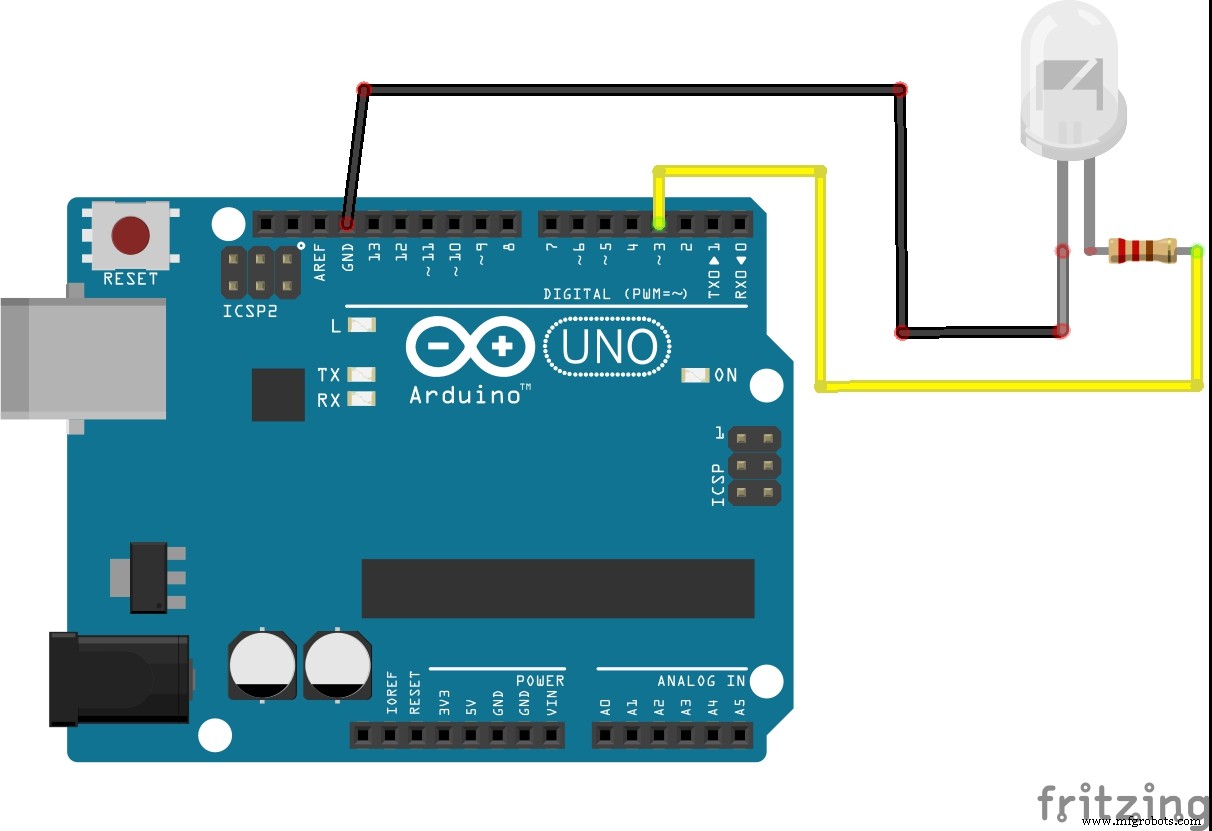 À l'aide d'un seul capteur infrarouge, le char est capable de détecter les signaux infrarouges provenant des chars opposés et de les enregistrer comme les coups
À l'aide d'un seul capteur infrarouge, le char est capable de détecter les signaux infrarouges provenant des chars opposés et de les enregistrer comme les coups 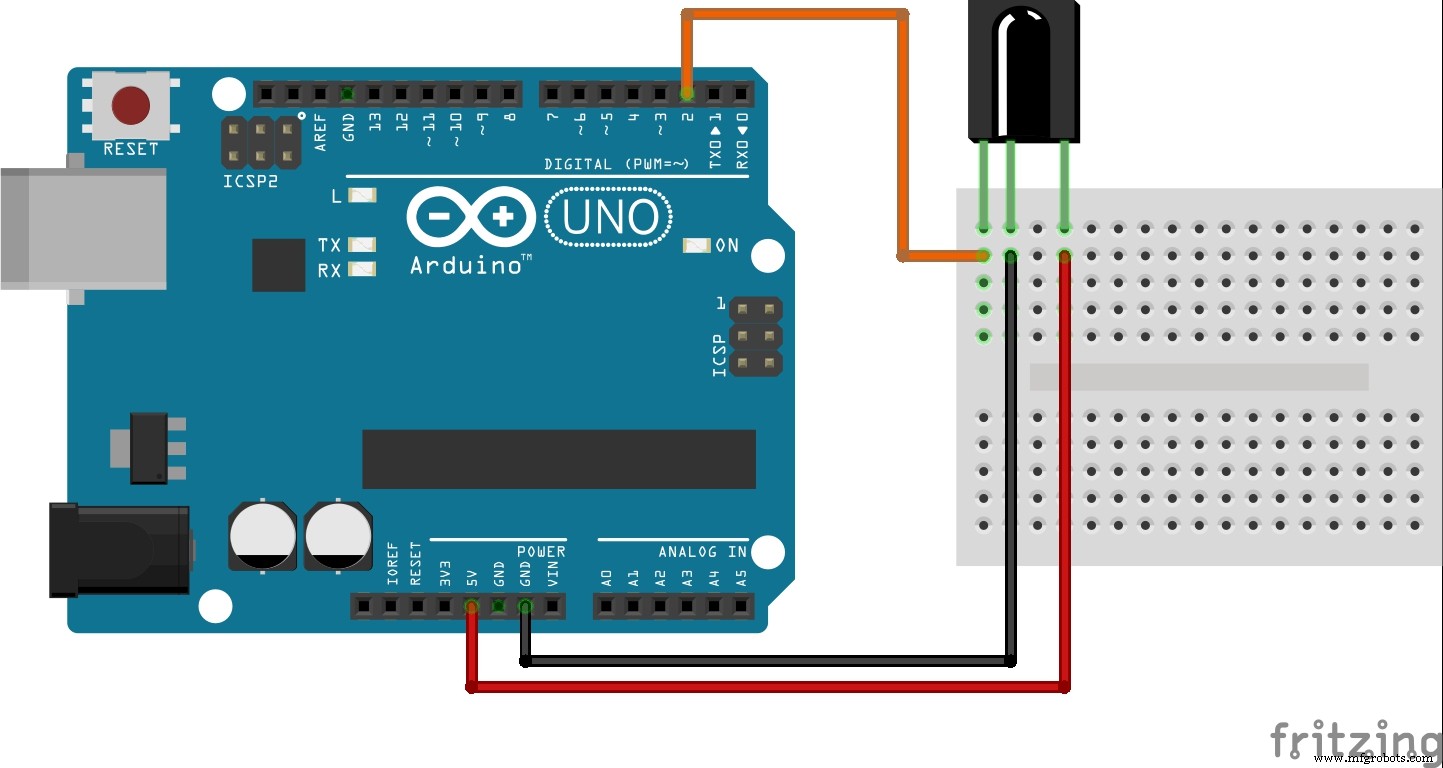 En utilisant 4 capteurs infrarouges connectés en guirlande avec un simple circuit intégré de porte ET (74HCT21), un réservoir est capable pour identifier les signaux infrarouges de la LED opposée du Tank comme des coups à 360 degrés autour de lui.
En utilisant 4 capteurs infrarouges connectés en guirlande avec un simple circuit intégré de porte ET (74HCT21), un réservoir est capable pour identifier les signaux infrarouges de la LED opposée du Tank comme des coups à 360 degrés autour de lui. 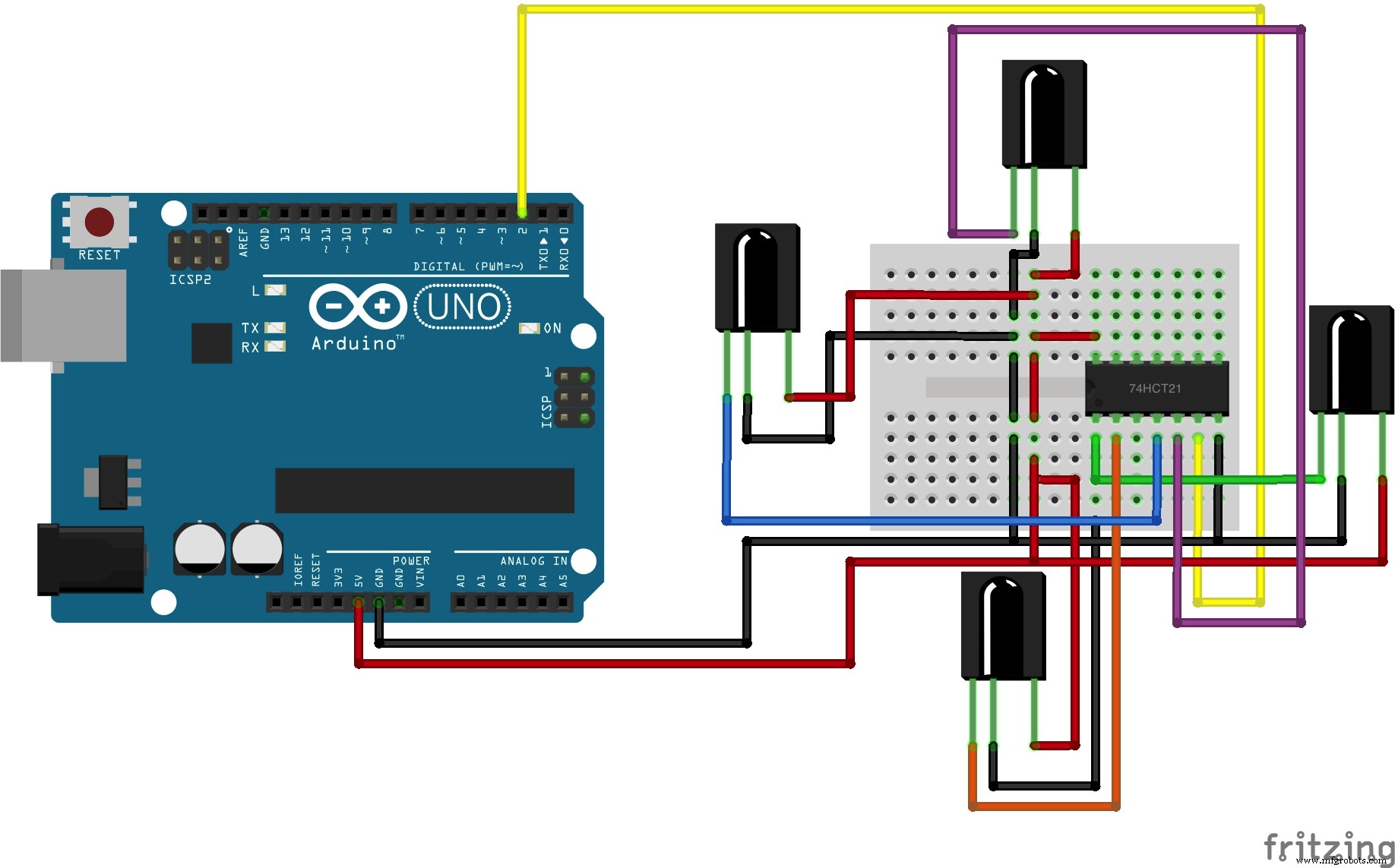 À l'aide d'une LED RVB, le Tank identifie son état actuel (combien de coups il a pris) en changeant la couleur de la LED. De plus, le char change la couleur de la LED en vert pour chaque coup qu'il tire.
À l'aide d'une LED RVB, le Tank identifie son état actuel (combien de coups il a pris) en changeant la couleur de la LED. De plus, le char change la couleur de la LED en vert pour chaque coup qu'il tire. 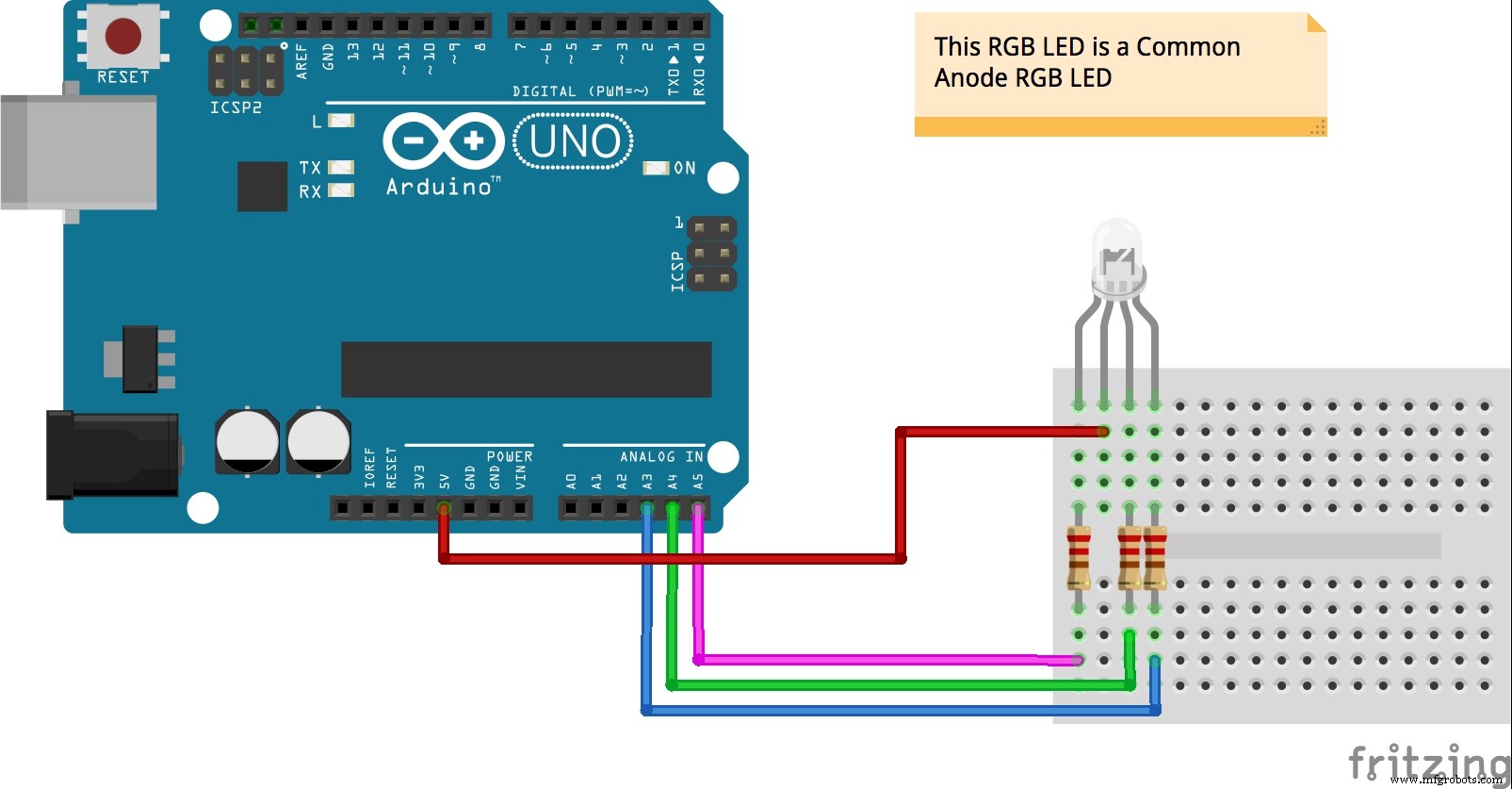 En utilisant un circuit intégré L293D et quelques moteurs à courant continu simples, le réservoir est capable d'avancer, de reculer et de tourner gauche ou droite.
En utilisant un circuit intégré L293D et quelques moteurs à courant continu simples, le réservoir est capable d'avancer, de reculer et de tourner gauche ou droite. 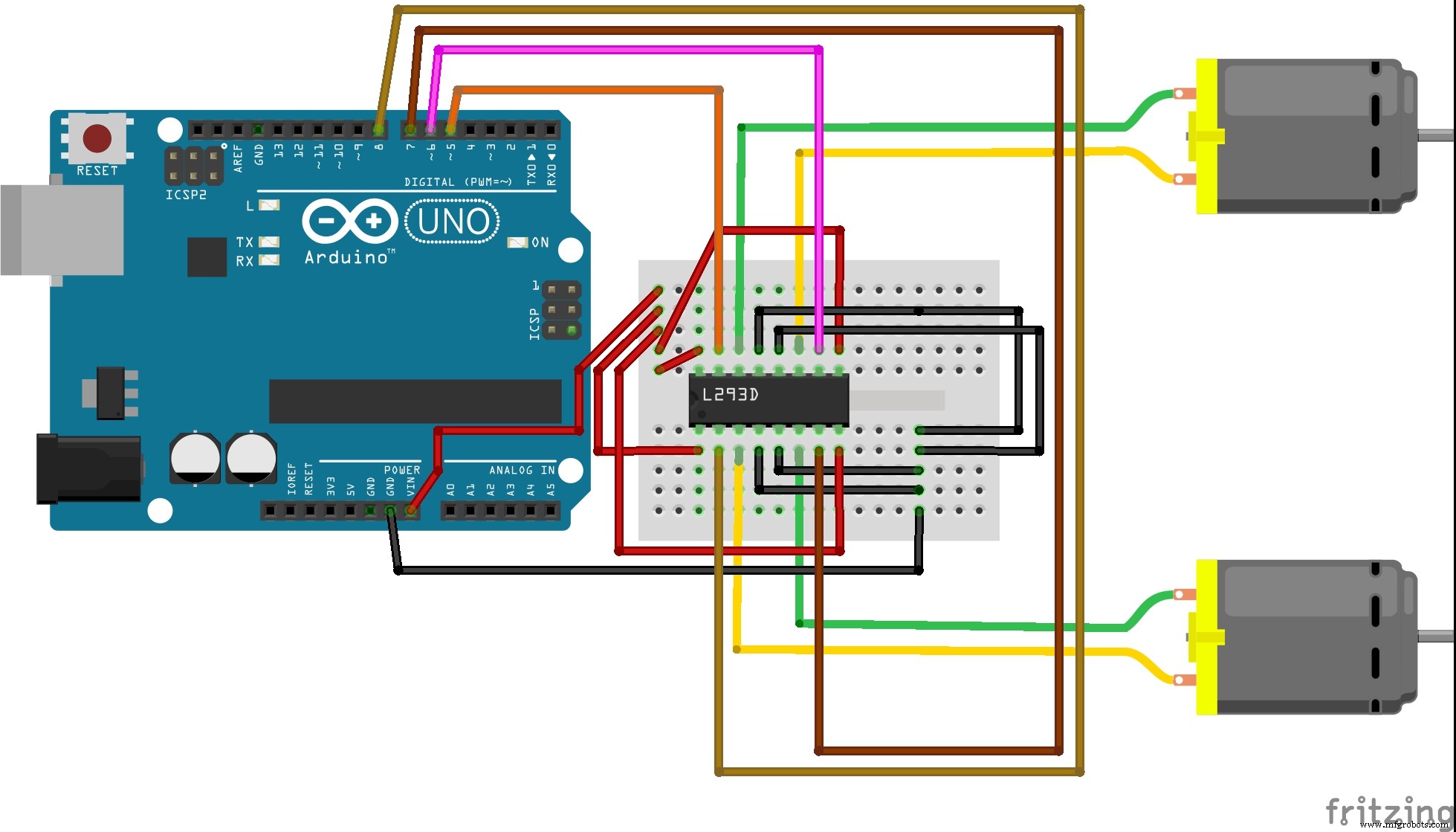 À l'aide d'un émetteur RF24 simple et peu coûteux, le réservoir est capable de communiquer et de recevoir des commandes de l'opérateur.
À l'aide d'un émetteur RF24 simple et peu coûteux, le réservoir est capable de communiquer et de recevoir des commandes de l'opérateur. 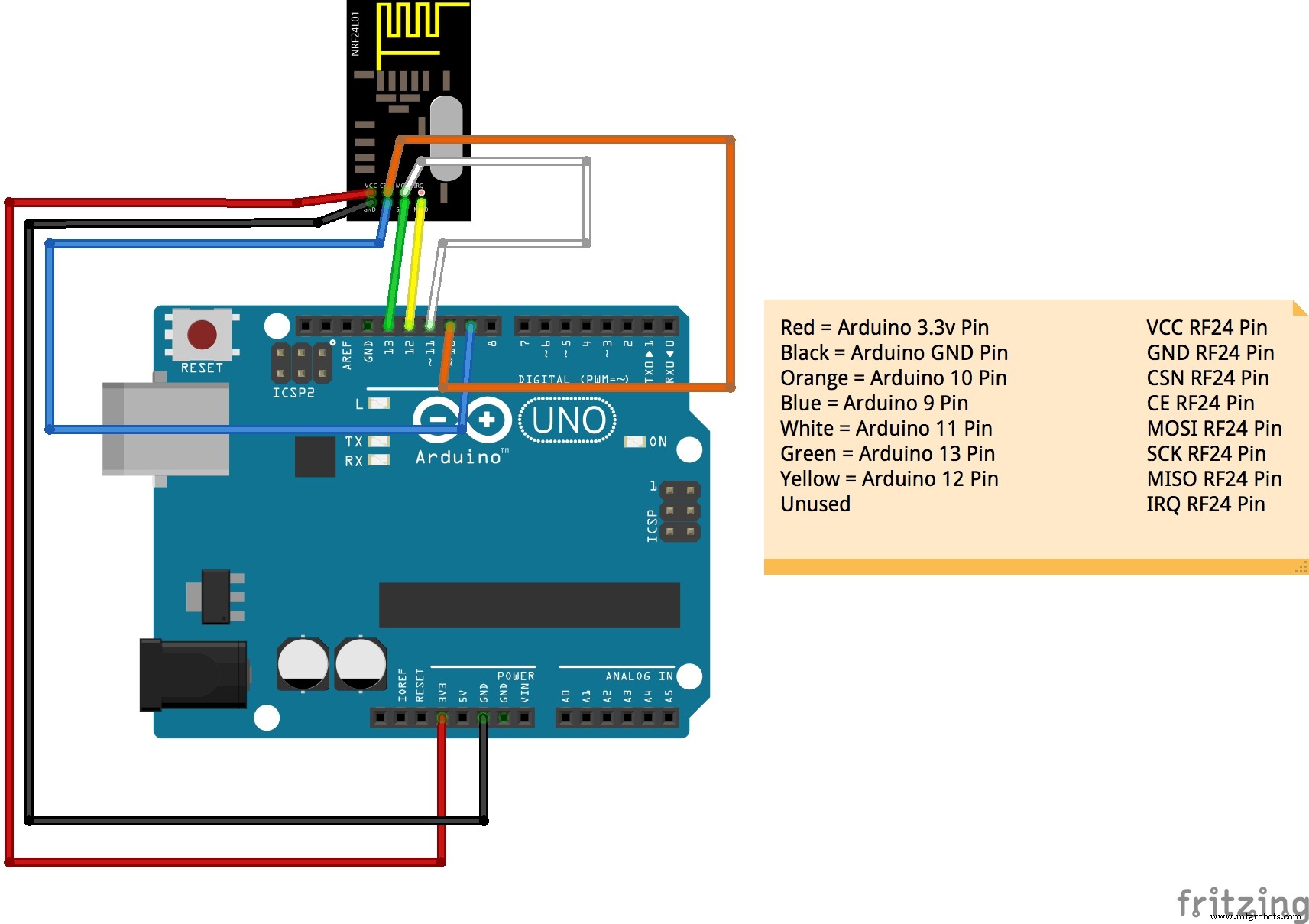 En utilisant un Raspberry Pi2, un émetteur RF24 simple et peu coûteux, et Node JS, l'opérateur est capable de communiquer avec chaque réservoir via des appels API REST.
En utilisant un Raspberry Pi2, un émetteur RF24 simple et peu coûteux, et Node JS, l'opérateur est capable de communiquer avec chaque réservoir via des appels API REST. 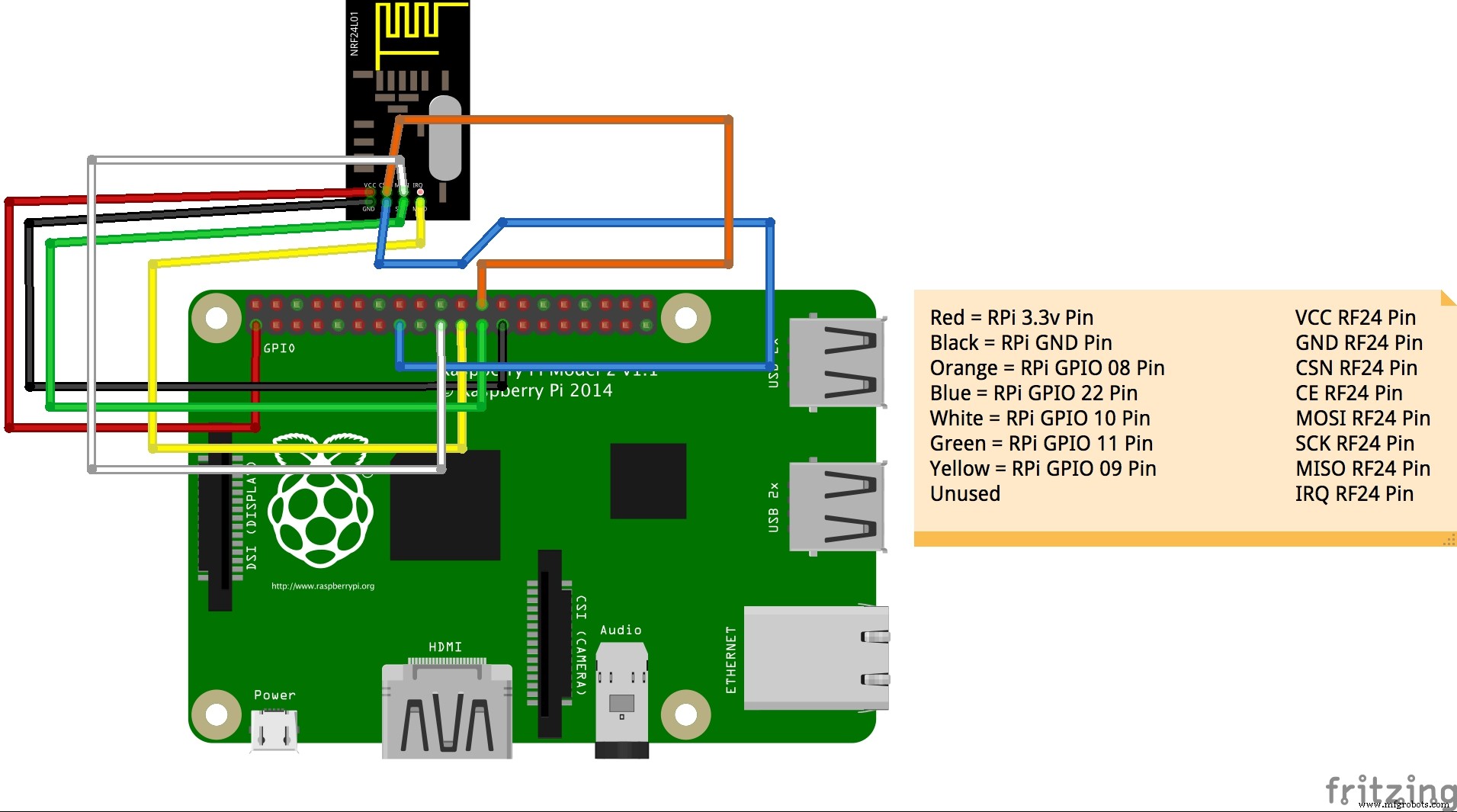
Processus de fabrication
- Guide du marquage laser sur aluminium
- Guide du marquage laser
- Qu'est-ce que le marquage laser à fibre ?
- Pointeur laser
- Laser à semi-conducteur
- Système de capteur de mouvement infrarouge DIY pour Raspberry Pi
- Capteur de mouvement utilisant Raspberry Pi
- MOSMusique
- Trois composants de base de la machine de marquage laser