


HC sr04 :comment fonctionne le capteur de distance à ultrasons et s'interface-t-il avec Arduino ?
Les ultrasons sont des ondes sonores aiguës dont les fréquences dépassent la plage audible de l'audition humaine normale (supérieures à 20 kHz). Un type de capteur à ultrasons est le HC-SR04 qui détecte les objets à 13 pieds de lui. Dans cet article, nous allons vous montrer le fonctionnement du capteur et mener un projet d'interfaçage avec Arduino.
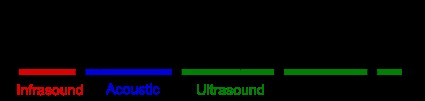
Plages de fréquence par rapport aux ultrasons
Présentation du capteur de distance à ultrasons HC SR04
- Un aperçu du matériel
Un capteur à ultrasons hc-sr04 (US) comprend deux transducteurs à ultrasons ; émetteur et récepteur.

Émetteur (T) et Récepteur (R)
Le récepteur attend et reçoit les impulsions transmises, tandis que l'émetteur convertit les signaux électriques en impulsions sonores ultrasonores de 40KHz.
- Spécifications
Les spécifications consistent en :
Dimensions – 45 x 20 x 15 mm
Signal d'entrée de déclenchement :impulsion TTL de 10 microsecondes
Angle de mesure – 15°
Précision de télémétrie – 3 mm
Portée minimale - 2 cm
Portée maximale - 4 cm
Fréquence de fonctionnement - 40KHz
Tension de fonctionnement - alimentation DC 5V
Broche de capteur de distance à ultrasons Hc-sr04

Broche du capteur à ultrasons HC-SR04
Nous avons résumé la configuration des broches du capteur à ultrasons hc-sr04 dans le tableau suivant.
| N° PIN | Nom de la broche | Description de la broche |
| 1 | Vcc | C'est la broche d'alimentation du capteur (tension d'alimentation 5 V). |
| 2 | Déclencher/ Déclencher | Il fonctionne comme la broche d'entrée. Maintenez-le toujours élevé pendant 10 µs pour commencer à mesurer en envoyant des ondes ultrasonores. |
| 3 | Écho | Il agit comme la broche de sortie. La broche d'écho reste élevée pendant une certaine période, équivalente au temps nécessaire à l'impulsion ultrasonore pour revenir à hc-sr04. |
| 4 | TERRE | Il se connecte à la masse du système. |
Quel est le principe de fonctionnement d'un capteur de distance à ultrasons HC-SR04 ?
Hc-sr04 fonctionne en produisant un ultrason d'environ 40K Hz qui se déplace dans l'air. Si les impulsions sonores ultrasonores rencontrent un obstacle ou un objet sur leur chemin de déplacement, elles rebondissent vers les capteurs.
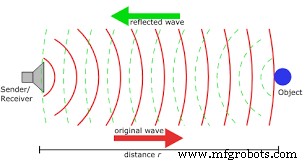
Comment fonctionne un capteur à ultrasons
Génération de l'échographie
Tout d'abord, assurez-vous que le trigPin est dans un état élevé pendant dix microsecondes, en envoyant une rafale ultrasonique de 8 cycles qui se déplace à la vitesse du son. Par la suite, l'echoPin passera à l'état haut après la rafale envoyée. Ensuite, l'echoPin attendra ou écoutera une onde ultrasonore que vous devez réfléchir à partir d'un objet.
L'echoPin passera dans un état bas après 38 ms si aucun objet n'est présent.
Cependant, s'il y a un objet qui reflète une impulsion ultrasonique, l'échoPin passe à l'état bas avant 38 ms.
Avec les informations sur la durée pendant l'état haut de la broche Echo, nous pouvons déterminer la distance parcourue par les ondes sonores. Nous déterminerons également la distance entre hc-sr04 et l'objet.
Distance =(Vitesse X Temps)/2
Par lequel ;
Heure =Durée pendant laquelle echoPin était élevé (en supposant qu'il est de 2 ms)
Vitesse =Vitesse du son (340m/s ou 340cm/s)
La division des résultats par deux permet de mesurer la durée de l'onde sonore nécessaire pour atteindre l'objet avant de rebondir.
Alors;
Distance =(Vitesse × Temps)/2 =(34cm/ms × 1,5ms) / 2 =25,5cm
Maintenant, la distance entre le capteur et l'objet est de 25,5 cm.
Dimensions Hc sr04
Les dimensions du capteur HC-SR04 sont indiquées ci-dessous :

Dimensions HC-SR04
Cependant, notez que les dimensions différeront toujours un peu en raison des différents fabricants.
Hc-sr04 connecté à Arduino
Il existe plusieurs façons d'interfacer votre capteur, notamment en utilisant I2C, Raspberry Pi et Arduino. Pour les projets d'aujourd'hui, nous nous attarderons sur une carte Arduino.
Matériel nécessaire
- Capteur de distance à ultrasons Grove
- Bouclier de base Grove
- Breadboard et fils de raccordement
- Carte Arduino UNO
Consignes
Connexion du matériel
- Commencez par connecter le capteur au blindage basé sur Grove sur le port D7.
- Deuxièmement, branchez votre shield Grove-base sur la carte Arduino.
- Ensuite, utilisez un câble USB pour connecter l'Arduino à un ordinateur.
La connexion des broches se trouve dans le tableau ci-dessous.
| Arduino UNO | Capteur à ultrasons HC-SR04 |
| TERRE | GND |
| -3 (ou toute autre broche d'E/S numérique) | Écho |
| 2 (ou toute autre broche d'E/S numérique) | Broche de déclenchement |
| 5V | Vcc |
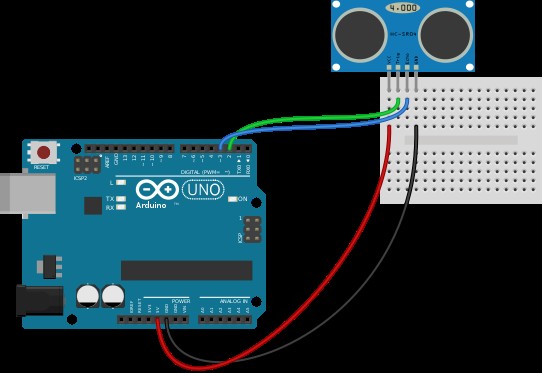
Capteur à ultrasons HC-SR04 et schéma de câblage Arduino
Configuration du logiciel
- Recherchez sur le site Web GitHub et téléchargez la bibliothèque de capteurs à ultrasons d'elle.
- Ensuite, copiez et collez le code dans l'IDE Arduino, où vous le téléchargerez ensuite.
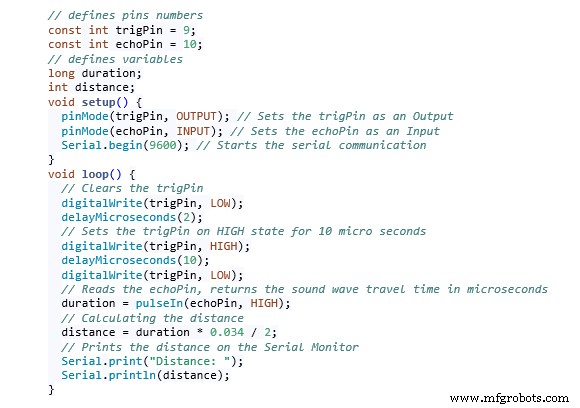
Le code apparaît comme celui ci-dessous.
Élaboration du code
Commencez par définir les broches Echo et Trig, c'est-à-dire pin3 (echoPin) et pin2 (trigPin). Plus loin, nous avons besoin d'une variable entière pour représenter la distance et d'une variable longue ("durée") pour connaître le temps de trajet depuis le capteur.
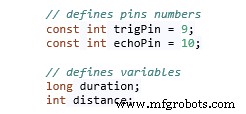
De plus, définissez l'echoPin comme entrée, tandis que le déclenchement sera la sortie. Ensuite, commencez la communication série qui affichera les résultats sur un écran de moniteur série.

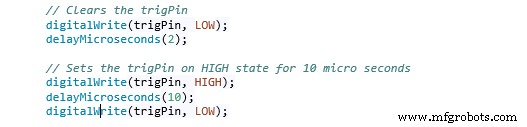
Assurez-vous que vous disposez d'un trigPin clair de sorte que vous puissiez le définir sur un état BAS pendant environ deux microsecondes pendant la boucle. Plus tard, augmentez le réglage de la broche à un état élevé de dix microsecondes pour produire une onde ultrasonore.
Ensuite, il y a un pulseIn() touche de fonction avec deux paramètres, c'est-à-dire
- État du pouls que vous devez lire (faible ou élevé), ou
- Nom de la broche Echo.
Utilisez la fonction pour lire le temps de trajet, puis placez la valeur dans la variable "durée".

Nous allons régler l'échoPin sur Élevé puisque le capteur HC-SR04 le règle automatiquement sur Élevé après avoir transféré la rafale ultrasonique à 8 cycles de l'émetteur. Par conséquent, la synchronisation commence, mais après avoir reçu l'onde sonore réfléchie, la synchronisation s'arrête en raison de la broche d'écho passant au niveau bas.
Finalement, le pulseIn() La fonction renvoie la longueur d'impulsion en microsecondes.
Nous utiliserons la formule discutée plus tôt pour obtenir la distance à partir d'ici. Par conséquent, multipliez la durée par 0,034, puis divisez la valeur par deux.
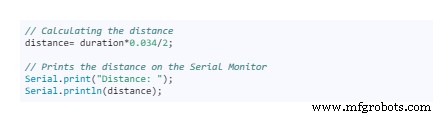
Enfin, imprimez la valeur de distance finale affichée sur le moniteur série.
Limites d'application de HC-SR04
Comparé à d'autres capteurs à ultrasons à faible coût, nous approuvons le capteur HC-SR04 comme étant idéal pour la convivialité et la haute précision. Cependant, le capteur peut poser certains défis, comme dans les exemples ci-dessous.
- Tout d'abord, il peut être difficile pour le capteur de détecter des objets à surface molle et irrégulière comme des animaux en peluche, car les objets absorbent mais ne réfléchissent pas le son.
- Deuxièmement, le montage bas du capteur HC-SR04 sur un appareil entraîne souvent un son réfléchi par le sol, et non par l'appareil. De plus, un objet peut être trop petit et ne pas refléter suffisamment le son vers le HC-SR04.
- Ensuite, si la surface réfléchissante de l'objet solide est à un angle faible, le son ne reflète pas HC-SR04.
- Enfin, si la distance entre l'obstacle/l'objet et le capteur est supérieure à 13 pieds, il n'y aura pas de réflexion sonore.
Conclusion
Le HC-SR04 est un capteur populaire facile à interfacer, abordable et à faible consommation d'énergie, donc idéal pour les appareils fonctionnant sur batterie. Il a une large gamme d'applications consistant à mesurer des distances entre 2 cm et 400 cm, à cartographier des objets dans un environnement, etc.
Si vous souhaitez en savoir plus sur le capteur à ultrasons, vous pouvez nous contacter. Nous serons plus qu'heureux d'avoir de vos nouvelles.
Technologie industrielle
- Comment fonctionne la machine de nettoyage à ultrasons dans tous les domaines de la vie ?
- Qu'est-ce que le cloud computing et comment fonctionne le cloud ?
- Mini radar avec Arduino
- Détecteur de portée à ultrasons avec Arduino
- Capteur à ultrasons HC-SR04 et Arduino – Guide complet
- Qu'est-ce que l'impression 3D ? - Types et comment ça marche
- Qu'est-ce que le soudage à l'arc ? - Types et comment ça marche
- Qu'est-ce que le rapporteur de biseau et comment ça marche ?
- Qu'est-ce qu'une aléseuse CNC et comment fonctionne-t-elle ?