


Conception du système de temps de vol :présentation du système
Onde continue (les caméras de temps de vol CW (ToF) sont un solution puissante offrant une précision élevée pour les applications nécessitant des informations 3D de haute qualité, mais les développeurs doivent prendre en compte plusieurs facteurs pour atteindre le meilleur niveau de performance.
Il s'agit du premier article de notre série de temps de vol (ToF) qui fournira un aperçu de la technologie du système de caméra CMOS ToF à onde continue (CW) et de ses avantages par rapport aux solutions d'imagerie 3D traditionnelles pour les applications de vision industrielle. Les articles suivants approfondiront certains des composants au niveau du système présentés dans cet article, notamment le sous-système d'éclairage, l'optique, la gestion de l'alimentation et le traitement de la profondeur.
Introduction
De nombreuses applications de vision industrielle nécessitent désormais des images de profondeur 3D haute résolution pour remplacer ou augmenter l'imagerie 2D standard. Ces solutions s'appuient sur la caméra 3D pour fournir des informations de profondeur fiables afin de garantir la sécurité, en particulier lorsque les machines fonctionnent à proximité des humains. Les caméras doivent également fournir des informations de profondeur fiables tout en fonctionnant dans des environnements difficiles, comme dans de grands espaces avec des surfaces hautement réfléchissantes et en présence d'autres objets en mouvement.
À ce jour, de nombreux produits ont utilisé des solutions de type télémètre à basse résolution pour fournir des informations de profondeur afin d'augmenter l'imagerie 2D. Cependant, cette approche présente de nombreuses limites. Pour les applications qui bénéficient d'informations de profondeur 3D à plus haute résolution, les caméras CW CMOS ToF offrent les solutions les plus performantes du marché. Certaines des fonctionnalités du système activées par la technologie de capteur CW ToF haute résolution sont décrites plus en détail dans le tableau 1. Ces fonctionnalités du système se traduisent également par des cas d'utilisation grand public tels que le bokeh vidéo, l'authentification faciale et les applications de mesure, ainsi que des cas d'utilisation automobile tels que que la surveillance de la vigilance du conducteur et la configuration automatisée en cabine.
Tableau 1. Caractéristiques du système de temps de vol à onde continue
Fonctionnalité du système Facilitateurs Précision et précision de la profondeur• Fréquence de modulation• Schémas de modulation et traitement de profondeurGamme dynamique• Bruit de lecture
• Fréquence d'images bruteFacilité d'utilisation• Procédure d'étalonnage
• Compensation de température
• Surveillance de la sécurité des yeuxFonctionnement en extérieur• Sensibilité à 940 nm
• Puissance et efficacité d'éclairageFusion 2D/3D• Taille des pixels
• Profondeur et images IR 2DFonctionnement multisystème• Suppression en pixels de la lumière parasite
• Synchronisation de la caméra
Continuous Wave CMOS Time of Flight Camera Overview
Une caméra de profondeur est une caméra où chaque pixel affiche la distance entre la caméra et la scène. Une technique pour mesurer la profondeur consiste à calculer le temps nécessaire à la lumière pour se déplacer d'une source lumineuse sur la caméra à une surface réfléchissante et revenir à la caméra. Ce temps de trajet est communément appelé temps de vol (ToF).
cliquez pour l'image en taille réelle
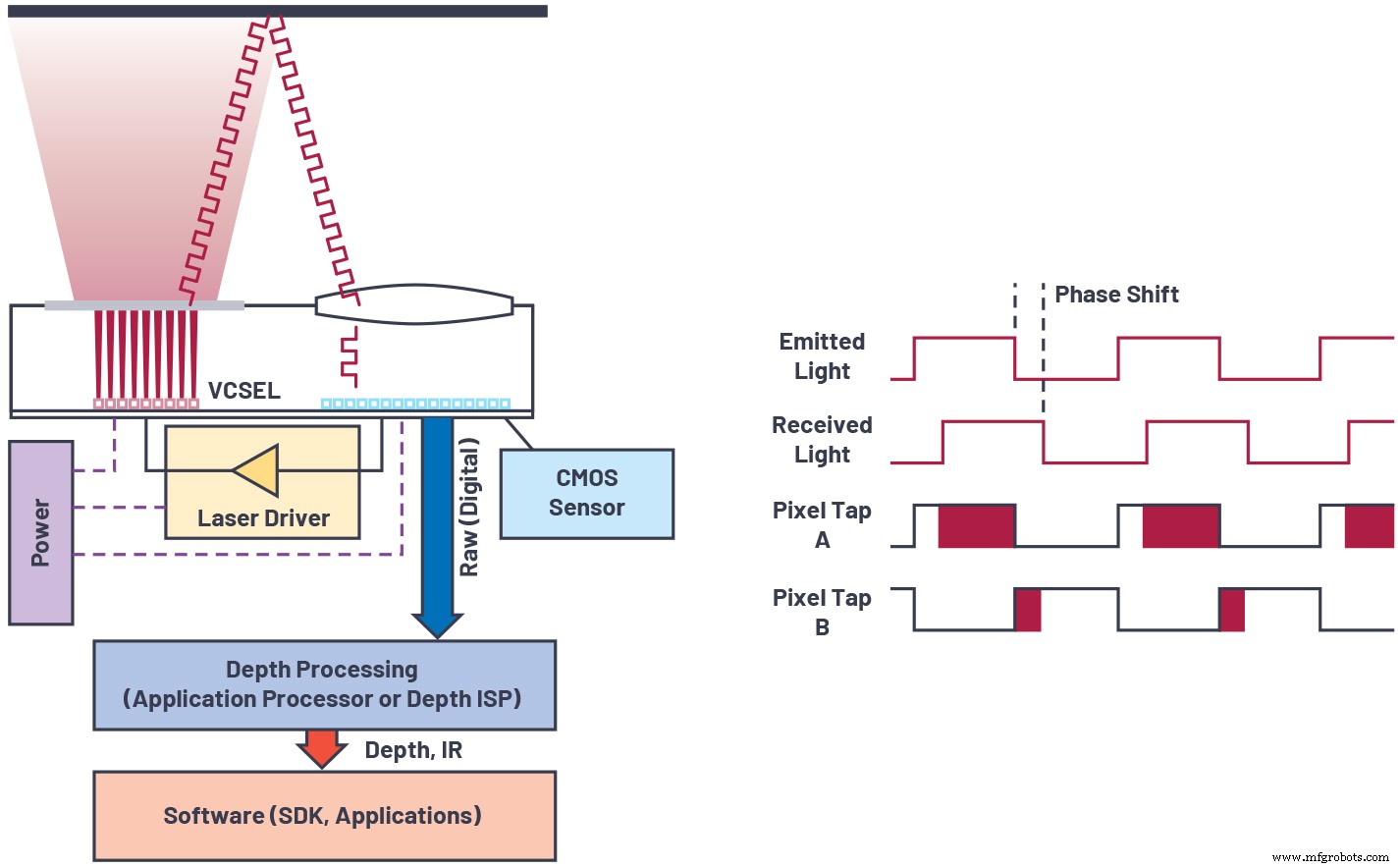
Figure 1. Vue d'ensemble de la technologie des capteurs de temps d'onde continue de vol. (Source :Appareils analogiques)
Une caméra ToF est composée de plusieurs éléments (voir Figure 1), notamment :
- une source lumineuse, telle qu'un laser à cavité verticale à émission par la surface (VCSEL) ou une diode laser à émission latérale, qui émet de la lumière dans le domaine proche infrarouge. Les longueurs d'onde les plus couramment utilisées sont 850 nm et 940 nm. La source lumineuse est généralement une source diffuse (éclairage d'inondation) qui émet un faisceau de lumière avec une certaine divergence (alias, champ d'éclairage ou FOI) pour éclairer la scène devant la caméra.
- un pilote laser qui module l'intensité de la lumière émise par la source lumineuse.
- un capteur avec un réseau de pixels qui collecte la lumière renvoyée par la scène et génère des valeurs pour chaque pixel.
- une lentille qui focalise la lumière renvoyée sur le réseau de capteurs.
- un filtre passe-bande co-localisé avec l'objectif qui filtre la lumière en dehors d'une bande passante étroite autour de la longueur d'onde de la source lumineuse.
- un algorithme de traitement qui convertit les images brutes de sortie du capteur en images de profondeur ou en nuages de points.
On peut utiliser plusieurs approches pour moduler la lumière dans une caméra ToF. Une approche simple consiste à utiliser une modulation à onde continue, par exemple une modulation à onde carrée avec un rapport cyclique de 50 %. En pratique, la forme d'onde laser est rarement une onde carrée parfaite et peut sembler plus proche d'une onde sinusoïdale. Une forme d'onde laser carrée donne un meilleur rapport signal/bruit pour une puissance optique donnée, mais introduit également des erreurs de non-linéarité de profondeur dues à la présence d'harmoniques à haute fréquence.
Une caméra CW ToF mesure le décalage horaire td entre le signal émis et le signal de retour en estimant le déphasage ϕ =2πftd entre les fondamentaux de ces deux signaux. La profondeur peut être estimée à partir du déphasage (ϕ) et de la vitesse de la lumière (c) en utilisant :

où fmod est la fréquence de modulation.
Un circuit de génération d'horloge dans le capteur contrôle les horloges de pixels complémentaires qui contrôlent respectivement l'accumulation de photo-charges dans les deux éléments de stockage de charges (Tap A et Tap B), ainsi que le signal de modulation laser vers le pilote laser. La phase de la lumière modulée renvoyée peut être mesurée par rapport à la phase des horloges des pixels (voir le côté droit de la figure 1). La charge différentielle entre Tap A et Tap B dans le pixel est proportionnelle à l'intensité de la lumière modulée de retour et à la phase de la lumière modulée de retour par rapport à l'horloge du pixel.
En utilisant les principes de détection homodyne, une mesure est effectuée avec plusieurs phases relatives entre l'horloge de pixel et le signal de modulation laser. Ces mesures sont combinées pour déterminer la phase du fondamental dans le signal lumineux modulé de retour. Connaître cette phase permet de calculer le temps nécessaire à la lumière pour voyager de la source lumineuse à l'objet observé et revenir au pixel du capteur.
Avantages des fréquences de modulation élevées
En pratique, il existe des non-idéalités telles que le bruit de photon, le bruit du circuit de lecture et les interférences multi-trajets qui peuvent provoquer des erreurs dans la mesure de phase. Avoir une fréquence de modulation élevée réduit l'impact de ces erreurs sur l'estimation de la profondeur.
Ceci est facile à comprendre en prenant un exemple simple où il y a une erreur de phase ϵϕ — c'est-à-dire que la phase mesurée par le capteur est ϕ =ϕ + ϵϕ . L'erreur de profondeur est alors :

Par conséquent, l'erreur de profondeur est inversement proportionnelle à la fréquence de modulation, fmod . Ceci est illustré graphiquement dans la Figure 2.
cliquez pour l'image en taille réelle
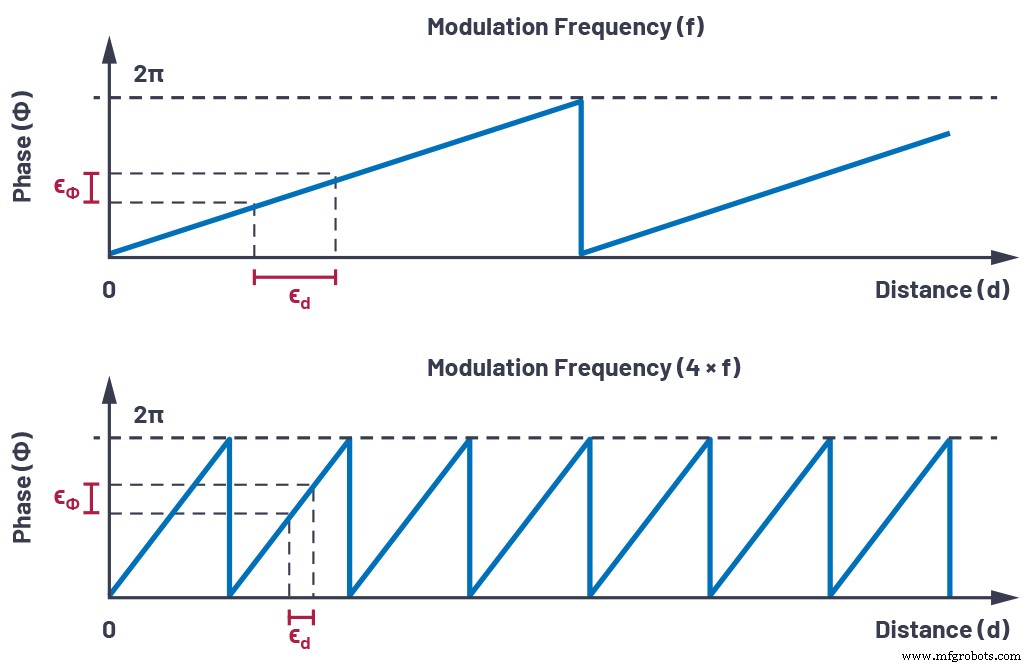
Figure 2. L'effet de l'erreur de phase sur l'estimation de la distance. (Source :Appareils analogiques)
Cette formule simple explique en grande partie pourquoi les caméras ToF avec une fréquence de modulation élevée ont un bruit de profondeur plus faible et des erreurs de profondeur plus petites que les caméras ToF avec une fréquence de modulation plus faible.
Un inconvénient de l'utilisation d'une fréquence de modulation élevée est que la phase s'enroule plus rapidement, ce qui signifie que la plage qui peut être mesurée sans ambiguïté est plus courte. Le moyen courant de contourner cette limitation consiste à utiliser plusieurs fréquences de modulation qui s'enroulent à des vitesses différentes. La fréquence de modulation la plus basse fournit une large plage sans ambiguïté mais des erreurs de profondeur plus importantes (bruit, interférences multivoies, etc.), tandis que des fréquences de modulation plus élevées sont utilisées en tandem pour réduire les erreurs de profondeur. Un exemple de ce schéma avec trois fréquences de modulation différentes est illustré à la figure 3. L'estimation de profondeur finale est calculée en pondérant les estimations de phase non emballées pour les différentes fréquences de modulation, des poids plus élevés étant attribués aux fréquences de modulation les plus élevées.
cliquez pour l'image en taille réelle
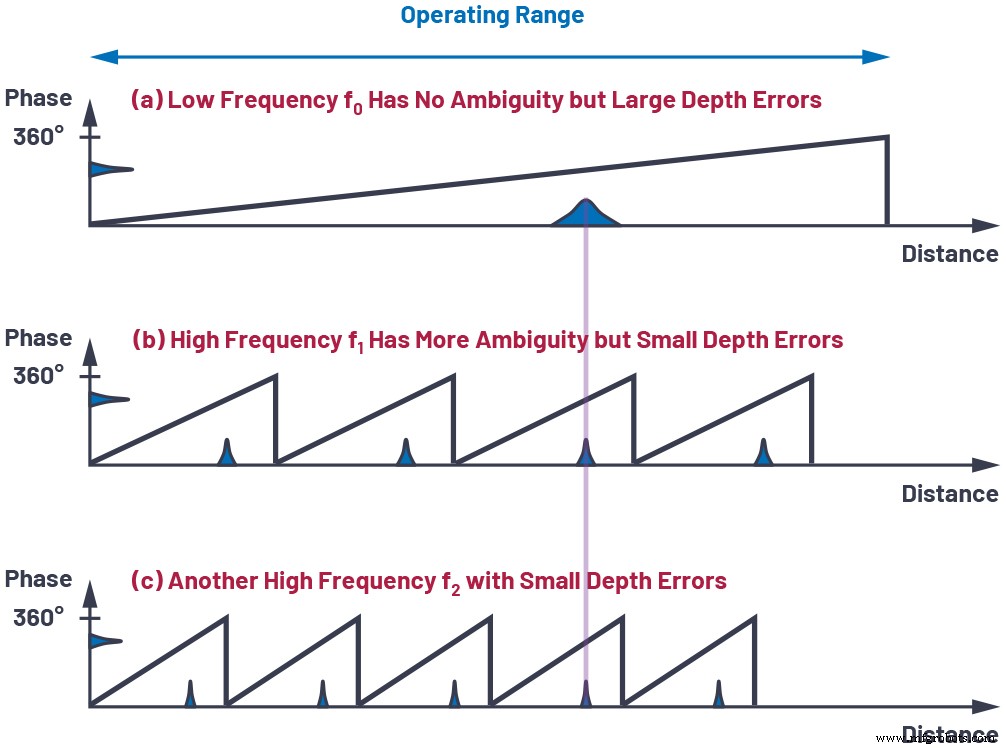
Figure 3. Déroulage de phase multifréquence. (Source :Appareils analogiques)
Si les poids pour chaque fréquence sont choisis de manière optimale, le bruit de profondeur est inversement proportionnel à la moyenne quadratique (rms) des fréquences de modulation choisies dans le système. Pour un budget de bruit de profondeur constant, l'augmentation des fréquences de modulation permet de réduire le temps d'intégration ou la puissance d'éclairage.
Autres aspects du système critiques pour les performances
Il existe de nombreuses fonctionnalités système à prendre en compte lors du développement d'une caméra ToF hautes performances, dont certaines sont brièvement décrites ici.
Capteur d'image
Le capteur d'image est un élément clé d'une caméra ToF. Les effets de la plupart des non-idéalités d'estimation de profondeur (par exemple, biais, bruit de profondeur et artefacts de trajets multiples) sont réduits lorsque la fréquence de modulation moyenne du système augmente. Il est donc important que le capteur ait un fort contraste de démodulation (capacité à séparer les photoélectrons entre la prise A et la prise B) à haute fréquence de modulation (des centaines de MHz). Le capteur doit également avoir une efficacité quantique (QE) élevée dans les longueurs d'onde du proche infrarouge (par exemple, 850 nm et 940 nm), de sorte qu'une puissance optique moindre est nécessaire pour générer des photoélectrons dans le pixel. Enfin, un faible bruit de lecture contribue à la plage dynamique de la caméra en permettant de détecter des signaux de retour faibles (objets lointains ou à faible réflectivité).
Éclairage
Le pilote laser module la source lumineuse (par exemple, VCSEL) à une fréquence de modulation élevée. Afin de maximiser la quantité de signal utile au pixel pour une puissance optique donnée, la forme d'onde optique doit avoir des temps de montée et de descente rapides avec des bords nets. La combinaison du laser, du pilote laser et de la disposition des circuits imprimés dans le sous-système d'éclairage est essentielle pour y parvenir. Une certaine caractérisation est également requise pour trouver les paramètres optimaux de puissance optique et de rapport cyclique afin de maximiser l'amplitude du fondamental dans la transformée de Fourier de la forme d'onde de modulation. Enfin, la puissance optique doit également être fournie de manière sûre avec des mécanismes de sécurité intégrés au niveau du pilote laser et du système pour garantir que les limites de sécurité oculaire de classe 1 sont respectées à tout moment.
Optique
L'optique joue un rôle clé dans les caméras ToF. Les caméras ToF ont certaines caractéristiques distinctes qui entraînent des exigences optiques particulières. Premièrement, le champ d'éclairage de la source lumineuse doit correspondre au champ de vision de la lentille pour une efficacité optimale. Il est également important que l'objectif lui-même ait une ouverture élevée (faible f/#) pour une meilleure efficacité de collecte de la lumière. Les grandes ouvertures peuvent entraîner d'autres compromis autour du vignettage, de la faible profondeur de champ et de la complexité de la conception de l'objectif. Une conception de lentille à faible angle de rayon principal peut également aider à réduire la bande passante du filtre passe-bande, ce qui améliore la réjection de la lumière ambiante et améliore donc les performances en extérieur. Le sous-système optique doit également être optimisé pour la longueur d'onde de fonctionnement souhaitée (par exemple, revêtements antireflet, conception de filtre passe-bande, conception de lentille) afin de maximiser l'efficacité du débit et de minimiser la lumière parasite. Il existe également de nombreuses exigences mécaniques pour garantir que l'alignement optique respecte les tolérances souhaitées pour l'application finale.
Gestion de l'alimentation
La gestion de l'alimentation est également d'une importance cruciale dans la conception d'un module de caméra 3D ToF hautes performances. La modulation laser et la modulation de pixel génèrent de courtes rafales de courants de crête élevés, ce qui impose certaines contraintes sur la solution de gestion de l'alimentation. Certaines fonctionnalités au niveau du circuit intégré du capteur (CI) peuvent aider à réduire la consommation électrique de pointe de l'imageur. Il existe également des techniques de gestion de l'alimentation qui peuvent être appliquées au niveau du système pour faciliter les exigences relatives à la source d'alimentation (par exemple, batterie ou USB). Les principales alimentations analogiques d'un imageur ToF nécessitent généralement un régulateur avec une bonne réponse transitoire et un faible bruit.
cliquez pour l'image en taille réelle
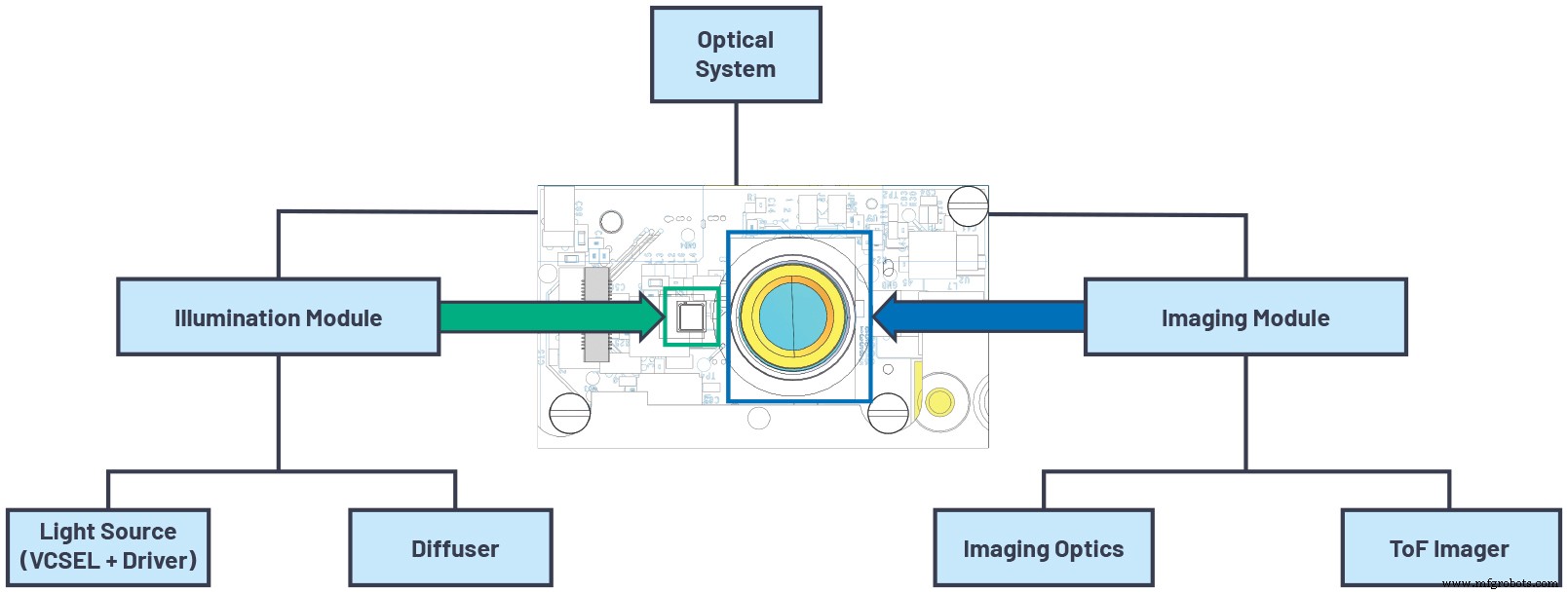
Figure 4. Architecture du système optique. (Source :Appareils analogiques)
Algorithme de traitement en profondeur
Enfin, une autre grande partie de la conception au niveau du système est l'algorithme de traitement en profondeur. Le capteur d'image ToF produit des données de pixels brutes à partir desquelles les informations de phase doivent être extraites. Cette opération nécessite différentes étapes qui incluent le filtrage du bruit et le dépliage de phase. La sortie du bloc de dépliage de phase est une mesure de la distance parcourue par la lumière du laser à la scène et retour au pixel, souvent appelée distance ou distance radiale.
La distance radiale est généralement convertie en informations de nuage de points, qui représentent les informations pour un pixel particulier par ses coordonnées réelles (X,Y,Z). Souvent, les applications finales n'utilisent que la carte d'image Z (carte de profondeur) au lieu du nuage de points complet. La conversion de la distance radiale en nuage de points nécessite de connaître les valeurs intrinsèques de la lentille et les paramètres de distorsion. Ces paramètres sont estimés lors de la calibration géométrique du module caméra. L'algorithme de traitement de la profondeur peut également produire d'autres informations telles que des images de luminosité active (amplitude du signal laser de retour), des images IR 2D passives et des niveaux de confiance, qui peuvent toutes être utilisées dans des applications finales. Le traitement de la profondeur peut être effectué sur le module de caméra lui-même ou dans un processeur hôte ailleurs dans le système.
Un aperçu des différents composants au niveau du système abordés dans cet article est présenté dans le tableau 2. Ces sujets seront traités plus en détail dans les prochains articles.
Tableau 2. Composants au niveau du système des caméras de temps de vol 3D
Composant de niveau système Caractéristiques clés Imager ToFRésolution, contraste de démodulation élevé, efficacité quantique élevée, fréquence de modulation élevée,faible bruit de lectureSource d'éclairagePuissance optique élevée, fréquence de modulation élevée,
fonctionnalités de sécurité oculaireOptiqueHaute efficacité de collecte de la lumière, lumière parasite minimale, bande passante étroiteGestion de l'alimentationFaible bruit , bonne réponse transitoire,
haute efficacité, fournit une puissance de crête élevéeProfondeur de puissanceFaible puissance, prend en charge différents types de sortie
informations de profondeur
Conclusion
Les caméras à temps de vol en onde continue sont une solution puissante offrant une précision élevée pour les applications nécessitant des informations 3D de haute qualité. De nombreux facteurs doivent être pris en compte pour s'assurer que le meilleur niveau de performance est atteint. Des facteurs tels que la fréquence de modulation, le contraste de démodulation, l'efficacité quantique et le bruit de lecture dictent les performances au niveau du capteur d'image. D'autres facteurs sont des considérations au niveau du système, qui incluent le sous-système d'éclairage, la conception optique, la gestion de l'alimentation et les algorithmes de traitement en profondeur. Tous ces composants au niveau du système sont essentiels pour obtenir le système de caméra ToF 3D de la plus haute précision. Ces sujets au niveau du système seront traités plus en détail dans les articles suivants. Pour plus d'informations sur les offres de produits ToF d'ADI, rendez-vous sur analog.com/tof.
 Paul O'Sullivan est ingénieur système chez Analog Devices à Santa Clara, en Californie. Il a rejoint Analog Devices en Irlande en 2004 où il a occupé divers postes de développement de tests et d'ingénierie d'applications avant de déménager en Californie en 2016 pour travailler sur des projets de technologies avancées pour les applications grand public. Il travaille sur le développement et l'étalonnage de modules de caméras 3D ToF depuis 2019. Il est titulaire d'un B.E. diplôme de l'University College Cork et M.Eng. de l'Université de Limerick, Irlande. Il peut être contacté à paul.osullivan@analog.com.
Paul O'Sullivan est ingénieur système chez Analog Devices à Santa Clara, en Californie. Il a rejoint Analog Devices en Irlande en 2004 où il a occupé divers postes de développement de tests et d'ingénierie d'applications avant de déménager en Californie en 2016 pour travailler sur des projets de technologies avancées pour les applications grand public. Il travaille sur le développement et l'étalonnage de modules de caméras 3D ToF depuis 2019. Il est titulaire d'un B.E. diplôme de l'University College Cork et M.Eng. de l'Université de Limerick, Irlande. Il peut être contacté à paul.osullivan@analog.com.  Nicolas Le Dortz est responsable de l'ingénierie système au sein du groupe technologique Time of Flight (ToF) d'Analog Devices. Dans ce rôle, il supervise le développement de l'offre technologique ToF d'ADI, reliant les équipes interfonctionnelles impliquées dans la fourniture de systèmes de caméras ToF et apportant des performances exceptionnelles aux clients d'Analog Devices. Il a reçu un M.S. en génie électrique de l'Ecole Polytechnique, France, en 2010, un M.S. en microélectronique de KTH, Suède, en 2012, et un doctorat. en génie électrique de l'Ecole Centrale-Supelec, France, en 2015, et il a été chercheur invité à l'UC Berkeley de 2013 à 2014. Il est passionné par le travail avec les clients pour créer de l'innovation autour de la détection de profondeur en réunissant des disciplines telles que la vision par ordinateur, traitement du signal, conception de circuits intégrés, développement de logiciels et conception optique. Il peut être contacté à nicolas.ledortz@analog.com.
Nicolas Le Dortz est responsable de l'ingénierie système au sein du groupe technologique Time of Flight (ToF) d'Analog Devices. Dans ce rôle, il supervise le développement de l'offre technologique ToF d'ADI, reliant les équipes interfonctionnelles impliquées dans la fourniture de systèmes de caméras ToF et apportant des performances exceptionnelles aux clients d'Analog Devices. Il a reçu un M.S. en génie électrique de l'Ecole Polytechnique, France, en 2010, un M.S. en microélectronique de KTH, Suède, en 2012, et un doctorat. en génie électrique de l'Ecole Centrale-Supelec, France, en 2015, et il a été chercheur invité à l'UC Berkeley de 2013 à 2014. Il est passionné par le travail avec les clients pour créer de l'innovation autour de la détection de profondeur en réunissant des disciplines telles que la vision par ordinateur, traitement du signal, conception de circuits intégrés, développement de logiciels et conception optique. Il peut être contacté à nicolas.ledortz@analog.com. Contenus associés :
- Les outils remontent la chaîne de valeur pour lever le mystère de Vision AI
- Créer des applications IoT efficaces avec tinyML et l'apprentissage automatique automatisé
- La technologie du temps de vol promet une précision accrue
- Le capteur de temps de vol proche infrarouge réduit les interférences du soleil
- La plate-forme Lidar prend en charge la détection d'occupation et la distanciation sociale
- Le capteur ToF offre une détection 3D rapide
- Le capteur de temps de vol à ultrasons offre une portée de 1 mètre
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
Capteur
- Échecs probables dans les systèmes non prouvés
- Le minuscule capteur d'images 3D utilise la technologie du temps de vol
- Blog :Conception de cartouches microfluidiques pour un système IVD
- Point de défaillance unique | Un aperçu simple
- Conception du système de portes | Coulée | Sciences de la fabrication
- Les changeurs de palettes réduisent le temps d'installation
- Temps de vol par rapport aux systèmes LiDAR FMCW
- Système de propulsion pour vol hypersonique
- Considérations relatives à la conception de l'éclairage pour les systèmes de vision en chirurgie robotique