


Villes intelligentes :le cas du lidar dans les systèmes de transport intelligents
L'un des aspects de l'agenda des villes intelligentes est le déploiement de systèmes de transport intelligents. Un projet pilote utilisant des capteurs lidar à la San Francisco Municipal Transportation Agency (SFMTA) a démontré comment le lidar a fourni une solution pour le pilote de feux de circulation intelligents de la ville, dans le cadre de la politique Vision Zero de San Francisco.
L'objectif de la politique Vision Zero de la ville est d'améliorer la sécurité routière, car on pense que chaque année, environ 30 personnes perdent la vie et plus de 200 autres sont grièvement blessées lors de leurs déplacements dans les rues de San Francisco. L'objectif du pilote de feux de circulation intelligents dans ce cadre plus large était d'explorer l'utilisation des systèmes de feux de circulation intelligents multimodaux (MMITSS), la communication dédiée à courte portée (DSRC), la priorité des signaux de transit (TSP) et la préemption des véhicules d'urgence (EVP ) pour donner la priorité aux véhicules d'urgence et de transport en commun. De plus, le MMITSS devrait également être capable de détecter les piétons et les vélos pour leur fournir des intervalles d'avance, des brouillages et/ou des phases protégées.
La première preuve de concept qui s'est terminée en janvier 2020 a déployé des capteurs lidar à cinq intersections et a démontré la capacité de profiler les données de manière précise et anonyme, avec une précision de 96 %. La deuxième preuve de concept prévoit d'ajouter la couche de données au réseau de contrôle du signal pour permettre l'« intelligence » dans les STI ; ceci est en cours et devrait se terminer au début de 2021.
Nous avons parlé à deux personnes impliquées qui ont fait la lumière sur la technologie, son déploiement et les résultats obtenus, et nous présentons ici les faits saillants des conversations. Tout d'abord, nous nous sommes entretenus avec Enzo Signore, directeur marketing du fournisseur de technologies de capteurs lidar, Quanergy. Ensuite, nous avons approfondi le projet de preuve de concept avec Paul Hoekstra, qui était le consultant indépendant en exécution de la stratégie pour le projet avec SFMTA.
Lidar :suivi des identifiants d'objets de manière anonyme
Enzo Signore de Quanergy explique l'intérêt de la technologie lidar dans ce type d'application, nécessitant le comptage de personnes et de véhicules et la gestion des flux, et surtout avec l'interdiction de la reconnaissance faciale.
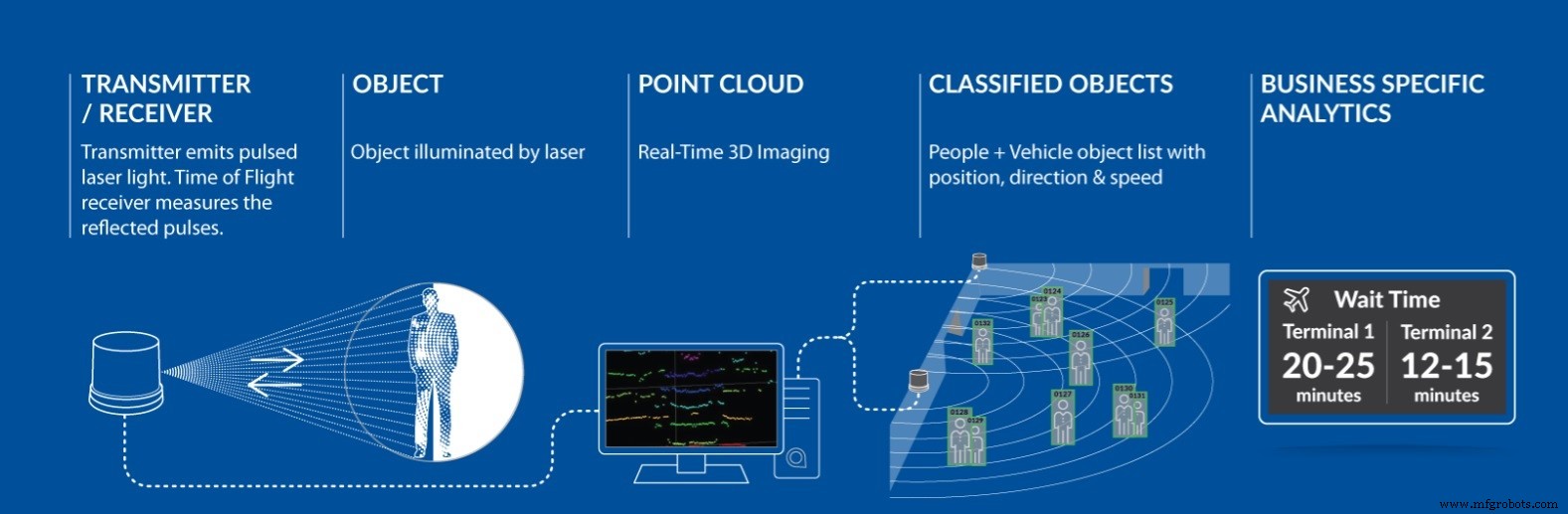
La proposition de valeur clé de la technologie lidar dans des applications telles que les stades et les villes intelligentes est la possibilité de suivre de manière anonyme un objet se déplaçant sur divers points de détection. Par exemple, une voiture traversera de nombreuses intersections ou un piéton traversera de nombreuses zones. Ce que Quanergy peut faire est d'attribuer un identifiant à un objet, et cet identifiant restera avec l'objet tout au long du trajet dans la zone surveillée.
C'est très complexe à faire, car lorsque vous traversez plusieurs intersections, vous avez besoin de plusieurs capteurs et de plusieurs serveurs pour le calcul de périphérie. La plupart des technologies auraient une vue cloisonnée de la zone qu'elles gèrent uniquement, et lors du franchissement de la frontière entre une zone et l'autre, l'identifiant serait perdu et un autre identifiant vous serait attribué. Avec cette approche, vous commencez à perdre la trace de tous les flux de personnes.
Nous avons une technologie appelée remise d'identité automatisée, qui transmettra l'identité de la personne ou du véhicule, d'une zone à l'autre. Tant que nous avons un champ de vision, le même identifiant restera avec l'objet. Cela donne une très bonne visibilité et un suivi de bout en bout. Cela peut être important pour les aéroports, par exemple du trottoir à la porte, où vous pouvez optimiser l'expérience des passagers, et pour les centres commerciaux et les villes. L'ID unique pour chaque individu permet d'activer l'analyse de bout en bout.
Les capteurs de Quanergy, la série M, fournissent une détection à longue portée, comme le MQ-8, spécialement conçu pour les applications de gestion de flux. Voici en quoi ces capteurs sont différents. Les capteurs lidar typiques ont une configuration de faisceau symétrique. Si vous montez le capteur à plat, la moitié du faisceau ira généralement vers le ciel et l'autre moitié vers le sol. S'il est monté à 3 mètres de haut sur un lampadaire de rue en regardant vers le bas pour la vue piétonne, alors dans cette configuration, la moitié du faisceau est gaspillée.
Dans notre conception, tous les faisceaux sont en fait dirigés vers le bas, ce qui permet d'avoir une couverture symétrique du sol. Cela signifie qu'il n'y a pas d'angles morts lorsqu'une personne traverse le champ de vision. Cela donne la possibilité de suivre sans interruption une personne ou un véhicule n'importe où dans le champ de vision. On peut voir un objet jusqu'à une portée de 70 m (soit :15 000 m²). Il s'agit d'une zone très vaste qui aurait autrement besoin de plusieurs caméras pour obtenir une couverture similaire. Par conséquent, cela réduit le nombre de capteurs et également le coût.
Surmonter les problèmes de confidentialité liés à la reconnaissance faciale
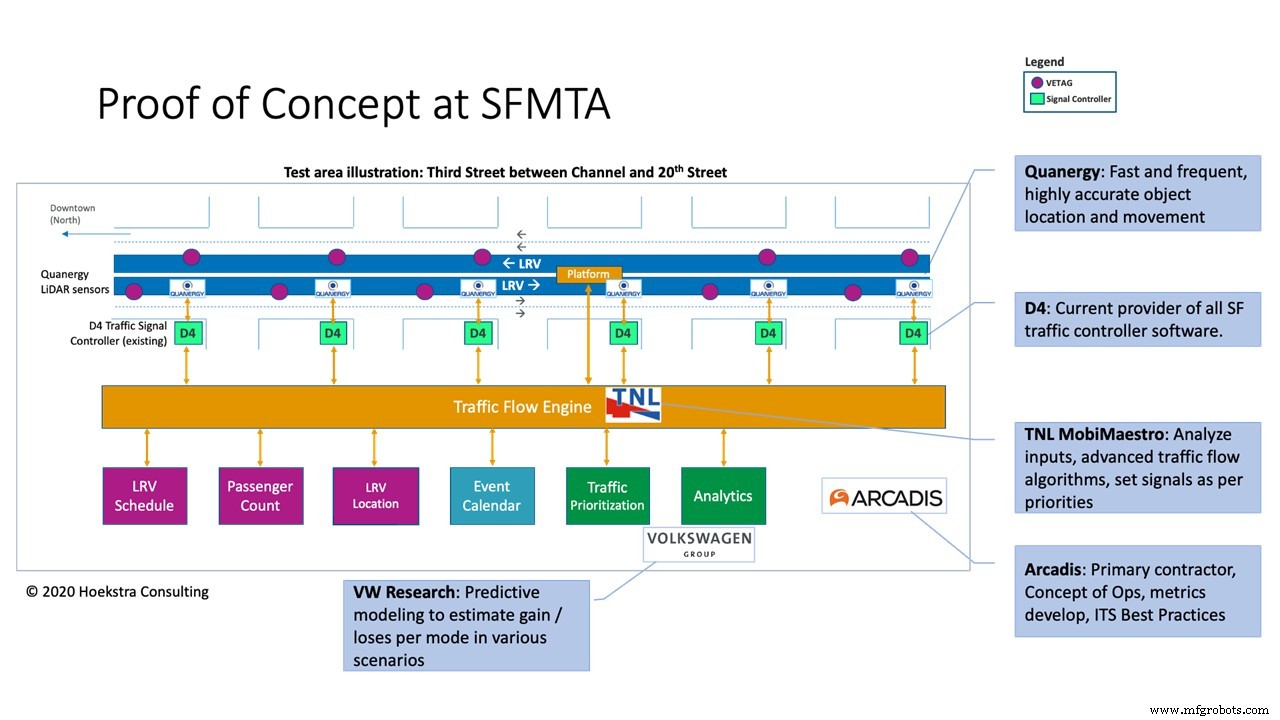
Paul Hoekstra, pour l'ATTM , décrit la réflexion derrière la mise en œuvre et le résultat de la première preuve de concept (PoC) sur cinq intersections le 3 rd Street, et des plans pour étendre la couverture.
Nous avons commencé à travailler avec SFMTA, Cisco et Quanergy en tant que partenaires sur ce projet en avril 2019. Initialement, dans le cadre du package Cisco, nous avions des capteurs DSRC. Nous avons découvert que nous les utilisions uniquement pour écouter toutes les voitures dans le couloir et sur l'autoroute que nous couvions. Nous avons constaté que moins de 1% de toutes les voitures diffusent réellement ce signal DSRC. Du point de vue de ce cas d'utilisation, la conclusion doit être que vous ne pouvez pas utiliser DSRC pour la mesure du flux de trafic. Ce n'est tout simplement pas assez important pour prendre des décisions.
À ce stade, nous avons maintenant terminé le premier (PoC) avec des capteurs Quanergy, et nous sommes maintenant au milieu du deuxième PoC.
Avec le premier PoC, nous avons pris 20 capteurs lidar, les avons installés sur cinq intersections le 3 rd Rue, près du nouveau stade de basket qui a ouvert l'année dernière. Nous avions un calcul de pointe avec Cisco TRX exécutant le logiciel Quanergy QORTEX. Les données du lidar passent par la boîte TRX et le logiciel Qortex publie les données sur le réseau, qui ira au centre de données, un petit cluster de VM exécutant la plate-forme Cisco Kinetic qui stocke tous les messages - tous les 30 millions par semaine.
Chaque dimanche, des rapports y sont publiés, un pour les véhicules, identifiant le véhicule par l'ID lidar à l'intersection, avec tout un tas d'attributs, comme l'heure, le jour de la semaine, d'où vient-il, où est-il allé, combien de fois y a-t-il eu un arrêt, combien de temps a duré l'arrêt, quelle était la vitesse, y avait-il un événement (à partir du calendrier des événements). De cette façon, nous pourrions relier toutes les intersections et suivre les véhicules dans le couloir. Et puis nous pourrions dire des choses comme « c'est le montant qui est entré en direction nord du côté sud du couloir, puis combien se sont éteints, et ainsi de suite ».
Avec le QORTEX de Quanergy, nous l'avons calibré et avons atteint une précision de 96 %. Vous ne pouvez pas simplement compter les identifiants avec le lidar ; vous devez créer une logique pour vous assurer que le même ID est dans la sortie et dans l'entrée. Avec cette logique, nous pouvons suivre les voitures à travers l'intersection. Nous avons une logique qui définit ce qu'est un arrêt. Par conséquent, cette précision de 96% est l'endroit où nous nous sommes retrouvés, c'est très précis. Pour les piétons, avec les zones que nous avons définies, vous pouvez voir si la personne est sur le trottoir ou non. Vous pouvez voir si une personne se trouve à l'intérieur ou à l'extérieur des limites d'un passage pour piétons. Vous pouvez voir à quel point une voiture était proche de la personne. Avec ce genre de données, nous pouvons créer des rapports sur les quasi-accidents. Nous avons défini ce que sont les quasi-accidents - les vecteurs, la vitesse, puis calculons le temps nécessaire pour qu'ils entrent en collision, et si c'est dans une certaine plage, alors vous l'appelez un quasi-accident.
Ceci n'est possible que parce que les données provenant de QORTEX sont si précises, que nous pouvons voir sans jamais avoir à identifier qui que ce soit. Nous ne stockons aucune information personnelle identifiable. Une personne n'est qu'un point. Et une voiture n'est qu'un bloc, vous ne savez pas de quel type de voiture il s'agit. Nous classons en fonction de la taille.
Le premier PoC portait sur l'analyse. Dans le second, nous augmentons le nombre d'intersections. Alors maintenant, nous en avons cinq, et nous allons passer à 10. Autrement dit, un couloir plus grand.
Nous superposerons ensuite toutes les données actuellement verrouillées dans les armoires. Dans les armoires, il y a un contrôleur de signal et sur le contrôleur, il y a de nombreux actionneurs. Il peut s'agir de la détection en boucle d'un véhicule, d'un bouton-poussoir pour piétons ou de capteurs dans la voie ferrée légère. Il y a une priorisation des feux de circulation. Tout cela se trouve dans le contrôleur de signal intégré.
Ce que nous faisons maintenant, c'est permettre un échange d'informations bidirectionnel avec les contrôleurs de signaux, en prenant toutes les données des intersections, telles que les données lidar et la classification des objets (encore une fois complètement anonymes), aux quais et aux arrêts de bus. La classification des objets de ces capteurs (qui sont tous traités sur les capteurs) nous donnera le nombre de personnes, ainsi que leur classification - par exemple, y a-t-il quelqu'un en fauteuil roulant, y a-t-il des gens qui poussent une poussette, ou sont-ils avoir un vélo. Bon nombre de ces facteurs détermineront le temps de séjour du véhicule de transport en commun. Nous voulons connaître le temps de séjour prévu en fonction du nombre de personnes présentes.
À partir du système back-end, nous allons récupérer le nombre de véhicules. Et ensuite, grâce à l'analyse, nous pouvons déterminer si nous avons besoin, par exemple, de 20 secondes de temps d'arrêt ou de 32 secondes de temps d'arrêt. Nous pouvons ensuite extrapoler les 10 intersections,
Traiter l'ensemble du corridor de transport comme un réseau
Pour optimiser l'ensemble du corridor, on ne peut pas le faire sans savoir précisément où se trouvent les personnes et les véhicules et pour combien de temps. Cela signifie que nous traitons l'ensemble du corridor comme un réseau, et non comme un nœud individuel. Cela signifie que nous parcourons les algorithmes à haute fréquence, et maintenant nous nous demandons si nous devons aller plus vite que 1 hertz, nous recalculons tout toutes les secondes.
Ensuite, nous disons au contrôleur de signal, vous passerez au vert en direction du nord. Cela boucle la boucle. En apprenant du travail de la chaîne d'approvisionnement de Cisco, vous savez que c'est la seule façon de déplacer des choses à travers l'intersection. Toute la technologie est disponible, mais elle n'optimise que tous les silos. De cette façon, nous faisons un grand pas en avant avec un nouveau paradigme, la gestion intégrée du trafic.
Il y a déjà 7 000 caméras à San Francisco. Mais les caméras ne vous donnent qu'une image 2D. La précision de la localisation est moins précise que ce que vous pouvez obtenir avec lidar. Le lidar fonctionne toujours, sous la pluie, la nuit. Et cela reste très loin des problèmes de confidentialité. Dès que les gens savent qu'ils sont suivis ou qu'ils peuvent être reconnus, il y a alors le problème des gens qui n'ont pas confiance dans le gouvernement pour les protéger.
Les résultats de ce projet sont de permettre aux véhicules d'urgence d'avoir la priorité en cas d'urgence, d'optimiser les horaires et les arrêts des transports en commun, et même de faire monter les voitures en peloton si aucun transport en commun n'est disponible, pour les déplacer plus efficacement dans le couloir.
Capteur
- Présentation des arguments en faveur des puces neuromorphiques pour l'IA informatique
- Le cas de la suite C pour DDMRP
- Wi-Fi :la solution miracle pour tout intelligent
- Exploiter la puissance des villes intelligentes pour un avenir meilleur
- Les arguments en faveur du rapatriement de la fabrication américaine
- Les entreprises fixent des délais pour les systèmes intelligents
- Le cas de l'impression 3D dans le secteur manufacturier
- Trouver la rentabilité de la fabrication intelligente
- Matériel pour la prochaine génération de capteurs intelligents