


Comprendre le taux d'erreur de code ADC
À mesure que le taux d'échantillonnage des convertisseurs analogique-numérique (CAN) à grande vitesse a augmenté, le problème des erreurs de code - également appelés codes sparkle - dans les données de sortie de l'ADC a augmenté. Une erreur de code est définie comme une erreur dans le code de sortie d'un CAN qui dépasse un seuil défini. Le seuil est le plus souvent défini comme le niveau auquel une erreur dépasse l'amplitude attendue du bruit de l'ADC de sorte que l'erreur peut être facilement identifiée en présence de bruit.
Une autre façon d'expliquer cette définition du seuil d'erreur est que l'amplitude d'erreur se produit avec une probabilité dépassant la probabilité attendue de cette amplitude étant donné le bruit distribué gaussien supposé de l'ADC. Fig. 1 montre un exemple d'erreur de code trouvée dans les échantillons de sortie d'un ADC. L'échantillon erroné est clairement visible par rapport à l'ajustement d'onde sinusoïdale idéale et dépasse de loin le bruit des autres échantillons du tracé.
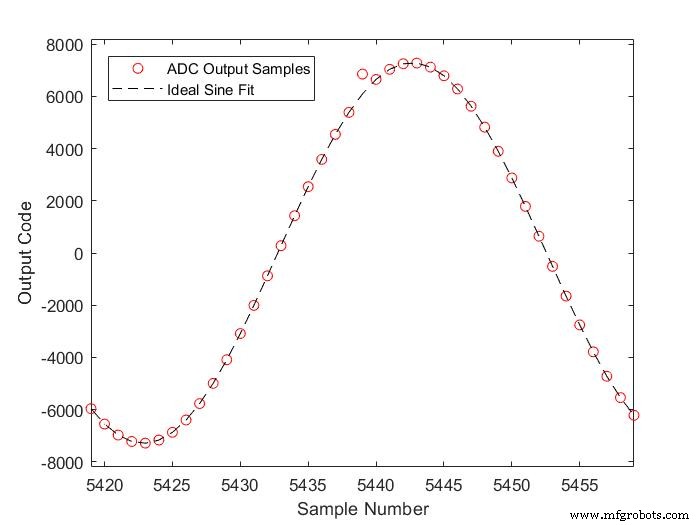
Fig. 1 :Exemple de sortie ADC avec une erreur de code.
Le taux d'erreur de code (CER) d'un ADC, également parfois appelé taux d'erreur de mot (WER) ou taux d'erreur de métastabilité, est défini comme le nombre moyen d'erreurs par échantillon et est mesuré en comptant le nombre moyen d'échantillons entre des erreurs consécutives. Il est le plus souvent défini comme un ordre de grandeur, tel que 10 -12 erreurs/échantillon. Le temps moyen entre les erreurs dépend donc de la fréquence d'échantillonnage du convertisseur. Le CER mesuré n'est précis que lorsque l'ADC fonctionne à la fréquence d'échantillonnage à laquelle le CER a été mesuré. En général, la réduction du taux d'échantillonnage peut améliorer le CER de plusieurs ordres de grandeur.
Examinons d'où viennent les erreurs de code pour voir pourquoi le taux d'échantillonnage est un facteur majeur.
Qu'est-ce qui fait briller un ADC ?
Une architecture ADC à plusieurs étapes, telle qu'un ADC flash en pipeline ou un ADC à registre d'approximations successives (SAR), convertit la tension échantillonnée en bits numériques par étapes, et chaque étape consécutive repose sur le résultat de l'étape précédente. Considérez un CAN haute vitesse flash pipeline de base, comme illustré dans la Fig. 2 . Ce CAN simplifié montre deux étages de conversion dans lesquels chaque étage successif produit un code numérique qui estime plus finement le signal d'entrée.
Le fonctionnement de l'ADC affiché est le suivant :
Le premier étage échantillonne la tension d'entrée et convertit grossièrement le signal d'entrée analogique en un code numérique à l'aide du CAN du premier étage. L'ADC flash dans cette étape fonctionne en comparant la tension échantillonnée aux références de tension statiques, générées à partir de la tension de référence principale de l'ADC (V REF ), à l'aide de comparateurs rapides. La sortie des comparateurs flash est un échantillon numérique codé par un thermomètre représentant la tension d'entrée.
Le code du thermomètre converti est ensuite envoyé directement au DAC du premier étage. Ce DAC sort la tension analogique, qui correspond à l'échantillon grossièrement converti.
La soustraction de la sortie du premier étage DAC de la tension d'entrée d'origine entraîne la tension d'erreur de quantification ou la tension résiduelle (V RES ). Le résidu est ensuite amplifié et rééchantillonné (pipeline) pour la deuxième étape.
Le CAN du deuxième étage quantifie V RES pour obtenir une estimation plus précise (résolution plus élevée) de la tension d'entrée analogique d'origine.
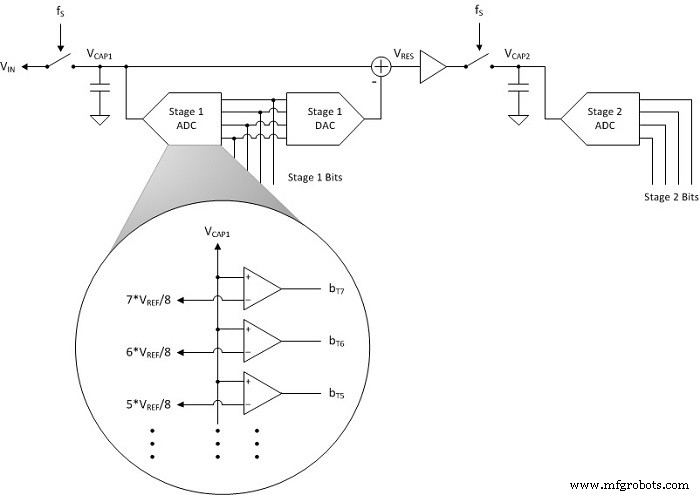
Fig. 2 :Exemple de schéma fonctionnel d'une architecture ADC flash en pipeline.
Le V RES processus de création introduit une boucle de décision à grande vitesse. Au cours d'une période d'horloge d'échantillonnage, la tension échantillonnée doit être convertie en un code numérique par le CAN du premier étage. Le code numérique doit être sorti du DAC du premier étage, soustrait de la tension d'entrée d'origine et rééchantillonné par le deuxième étage. La boucle de décision à grande vitesse introduit des erreurs de code car le comparateur dans le flash CAN a un temps de stabilisation qui est fonction de la différence entre la tension échantillonnée et V REF .
Plus simplement, un comparateur met plus de temps à s'installer lorsque la tension d'entrée (V CAP1 ) est proche de la tension de référence (comme 7 * V REF /8) du comparateur. Théoriquement, si V CAP1 est infiniment proche de la tension de référence du comparateur, le comparateur ne se stabilisera jamais car il fonctionnera dans sa région linéaire.
Le bruit empêchera que cela se produise réellement, mais si le comparateur met trop de temps à s'installer, le DAC du premier étage peut utiliser le code numérique incorrect pour produire la tension analogique quantifiée. Le résultat est un V RES qui ne correspond pas au code de sortie numérique réel du CAN du premier étage. Le CAN du deuxième étage convertit alors le mauvais V RES , ce qui entraîne une erreur de code.
Qu'est-ce qui affecte la RCE ?
Vous devriez maintenant avoir suffisamment de détails pour pouvoir tirer des conclusions sur ce qui affecte le CER. Le CER dépend clairement de la fréquence d'échantillonnage. Un taux d'échantillonnage plus rapide réduit le temps nécessaire à la boucle de décision pour prendre une décision. Moins de temps pour prendre une décision entraîne une augmentation exponentielle de la probabilité que le comparateur ne se soit pas installé à temps.
–Matt Guibord est ingénieur système en convertisseurs haute vitesse chez Texas Instruments.
Embarqué