


Fabriquer une machine à écrire pour les devoirs à la maison
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
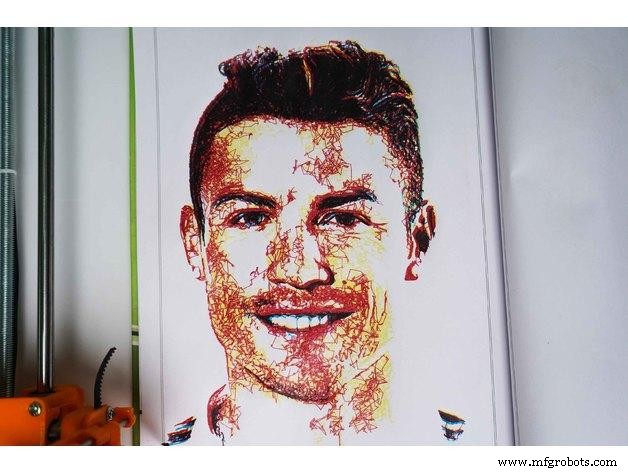
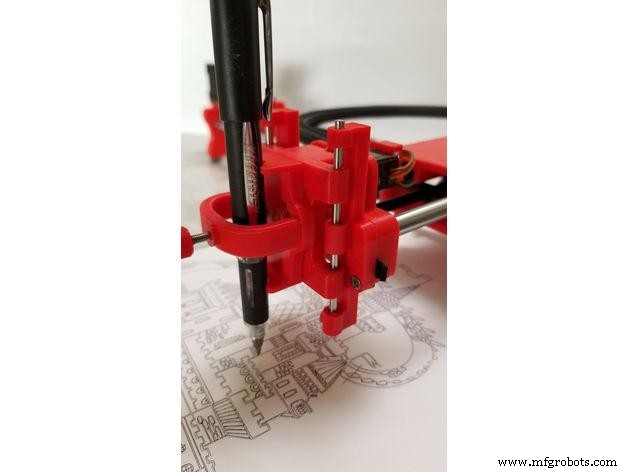
Le robot de dessin/traceur à stylos/machine à dessiner est une version Open Hardware de la célèbre machine AxiDraw qui est un traceur à stylos, capable d'écrire ou de dessiner sur presque toutes les surfaces planes. Il peut écrire avec des stylos, des marqueurs permanents, des crayons et d'autres outils d'écriture pour gérer une variété infinie d'applications.
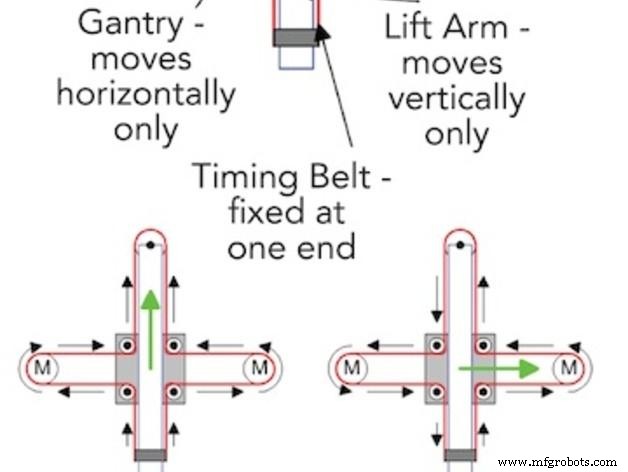
Sa conception unique comprend une tête d'écriture qui s'étend au-delà de la machine, permettant de dessiner sur des objets plus gros que la machine elle-même. Le plus grand avantage de la machine est qu'elle peut être placée sur le livre en raison de la conception d'extension du noyau XY de la machine.
Ce robot de dessin/traceur de stylos/machine de dessin est similaire à l'AxiDraw disponible dans le commerce. Il est alimenté par un contrôleur Arduino Uno, utilise un bouclier CNC et le micrologiciel GRBL
Le coût de construction du robot de dessin se situe entre 75 $, selon l'endroit où vous achetez vos pièces et si vous possédez déjà certaines des pièces telles que l'Arduino.
Vous pouvez retrouver tous mes projets sur https://www.diyprojectslab.com/
Zone de dessin maximale 24 * 30 CM.
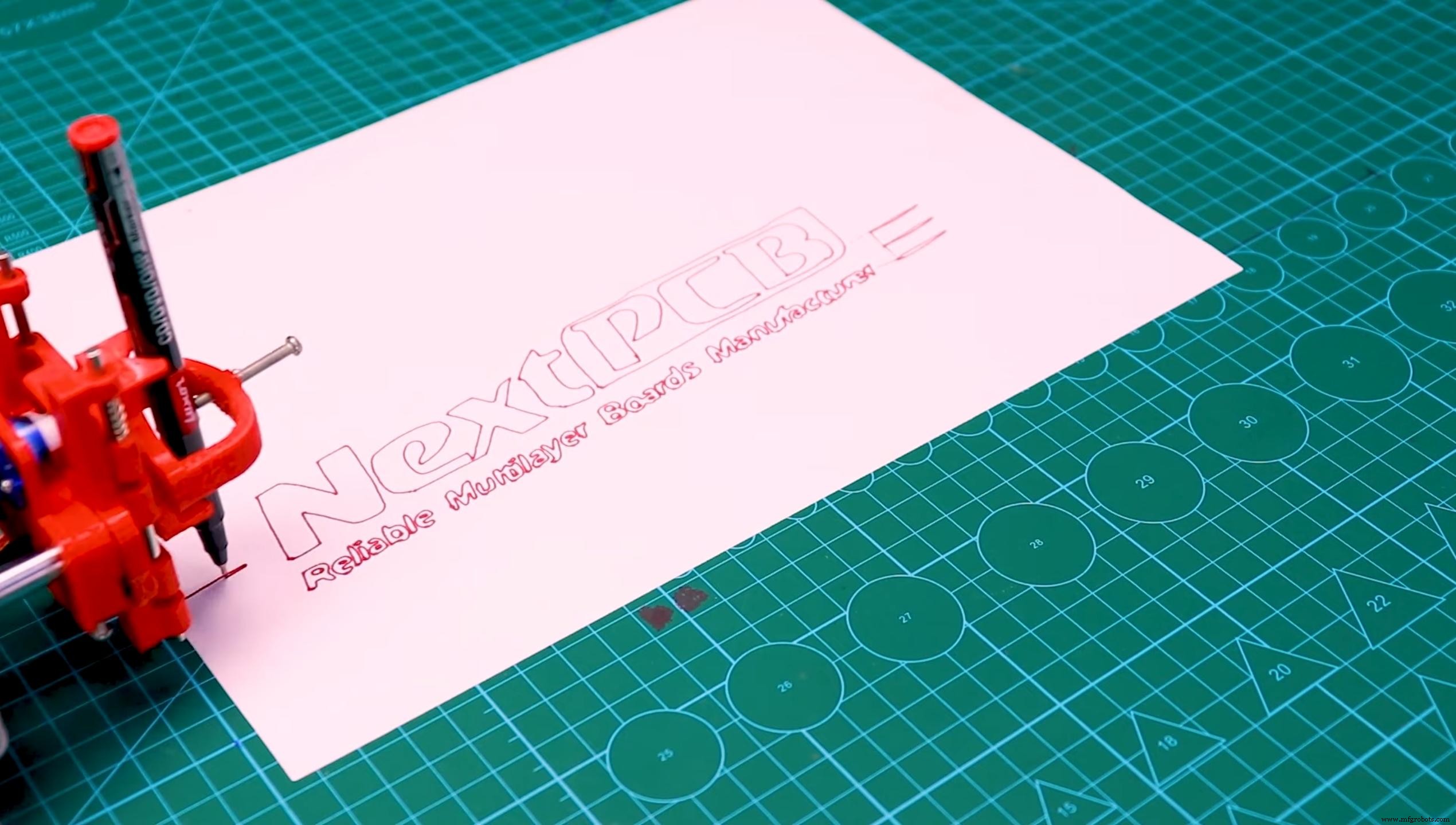
Merci NextPCB
Ce projet est mené à bien grâce à l'aide et au soutien de NextPCB. Les gars, si vous avez un projet PCB, veuillez visiter leur site Web et obtenir des remises et des coupons intéressants.
Livraison gratuite 0$ PCB Prototype:https://www.nextpcb.com/pcb-quote?act=2&code=Romeo...
Tirage au sort de Noël de Thanksgiving 100% gagnant :https://www.nextpcb.com/christmas-lucky-draw?code...
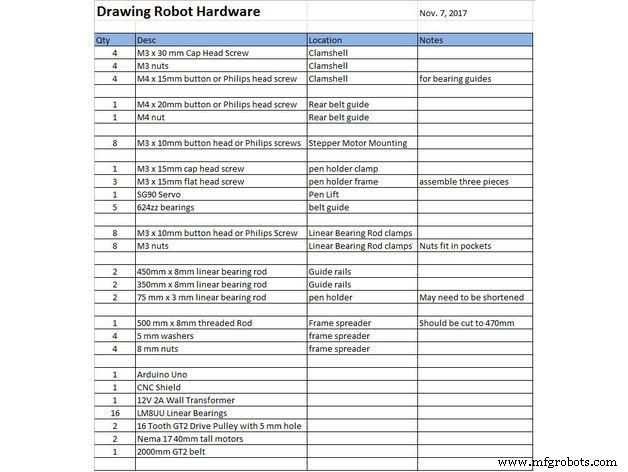
Étape 1 : pièces et matériaux requis

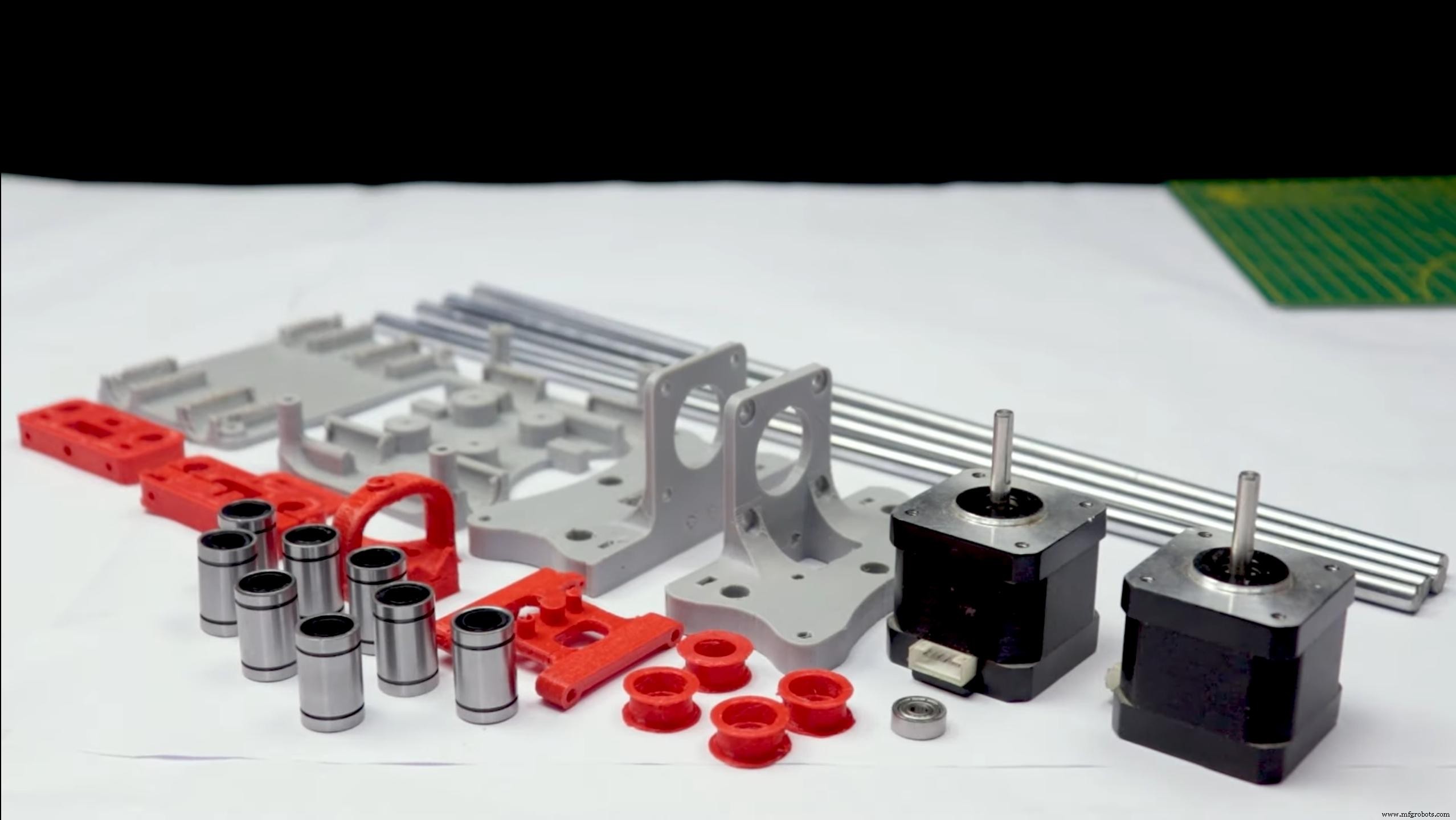
2 x moteurs pas à pas Nema 17 Amazon.com
2 x tige linéaire M8 x 450mm pour axe X Amazon.com
2 x tige linéaire M8 x 350mm pour axe Y Amazon.com
2 x tige linéaire 3 mm pour axe Z (vous pouvez l'obtenir à partir d'un ancien CD-ROM)
1 x tige filetée M8 x 480 mm8 x roulements LM8UU Amazon.com
1 x Servo Sg901 x Ressort 5m (du stylo à bille) Amazon.com
2 x Poulie GT2, 16 dents Amazon.com
5 x roulement 624zz Amazon.com
1 courroie GT2 2000 mm Amazon.com
1 x Arduino Uno Amazon.com
1 x Bouclier CNC Amazon.com
2 x A4988 pilote pas à pas avec dissipateur thermique Amazon.com
6 x Cavaliers Amazon.com
1 x alimentation 12V 2A Amazon.com
Noix
- 7 x M3-0,5
- 5 x M4-0.7
- 4 x 5/16 po-18
Amazon
Vis
- 13 x Phillips M3-0,5 x 16 mm
- 4 x Phillips M3-0,5 x 6 mm
- 5 x Phillips M4-0,7x 35mm
- 1 x Hex M3-0,5 x 20mm
Rondelles
- Laveuse 4 x 5/16 po
- 4 rondelles M3
Étape 2 : impression 3D

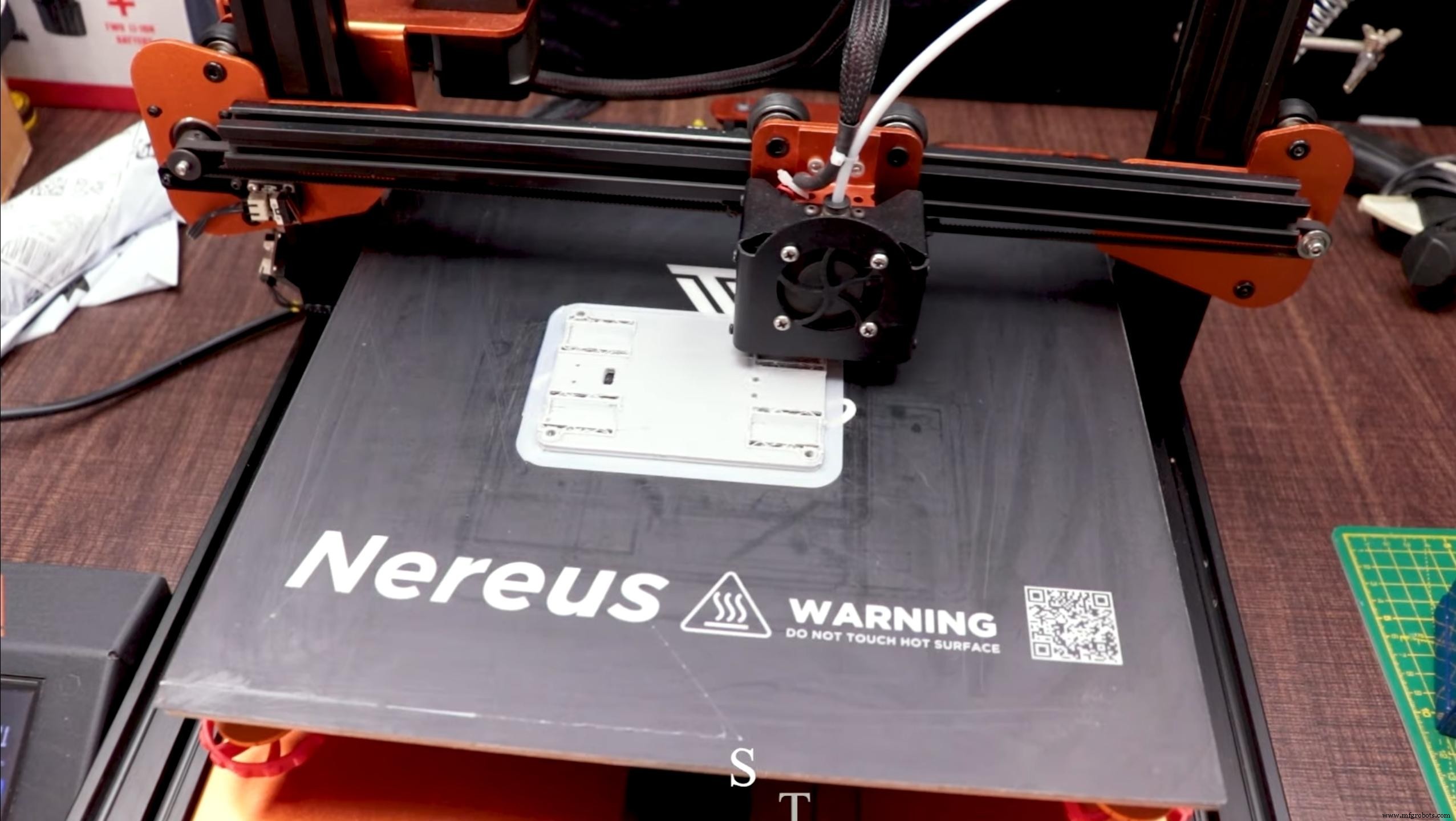
Téléchargez les fichiers depuis Thingiverse
Ouvrez les modèles 3D dans Cura ou tout autre slicer.
Utilisez 75 % de remplissage sur toutes les pièces (un remplissage de 70 - 100 % fonctionnera également)
Impression de toutes les pièces avec une hauteur de couche de 0,10 à 0,20 mm
Imprimé avec du PLA
Utilisez des supports sur le porte-stylo, le curseur, le X_Support_L et le X_Support_R
Remarque :La partie la plus longue a pris environ 10 heures et la plus courte a pris 30 minutes à imprimer
Le PLA convient parfaitement à cette conception. J'imprime à 200C sur BuildTak. Aucune des pièces ne nécessite de radeaux ou de bords. Je suggère des supports uniquement pour le porte-stylo et la plaque d'extrémité de l'axe Z qui est debout.
Étape 3 :Assembler l'axe X
N'oubliez pas que vous avez besoin de (2) tiges linéaires de 350 mm et (2) de 450 mm de long
Prenez le (2) 450mm tiges linéaires et insérez-les dans l'une des pièces de support en x
- Utilisez peut-être besoin d'utiliser une lime ronde pour lisser les trous dans lesquels vous les insérez
- Vous pouvez également utiliser un maillet en caoutchouc pour aider à insérer les tiges
Prenez maintenant la tige filetée et insérez-la dans le trou en dessous. Insérez une rondelle de 5/16 po et un écrou de 5/16 po des deux côtés de la pièce de support en x
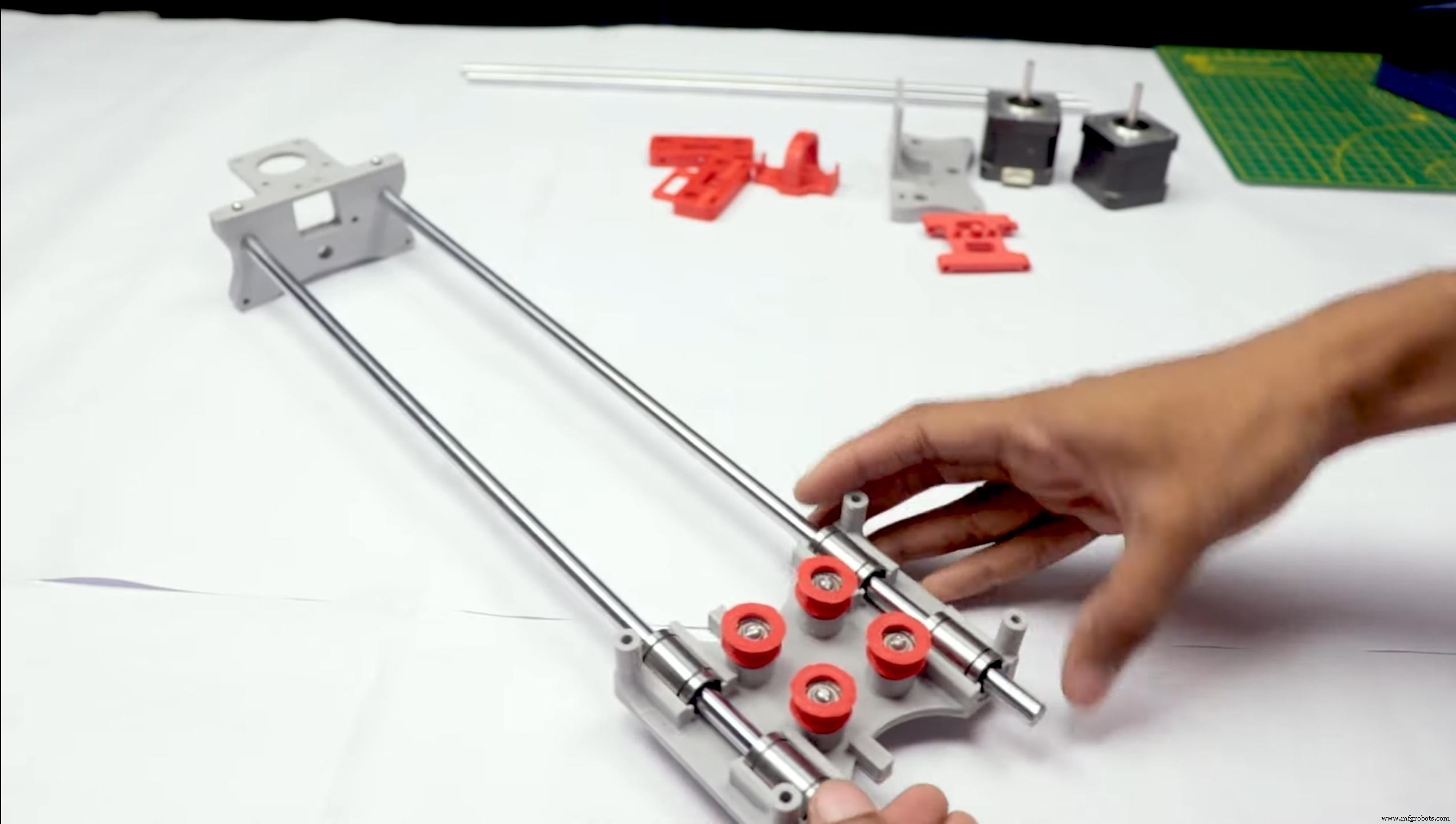
Étape 4 :Assembler le roulement de l'axe X


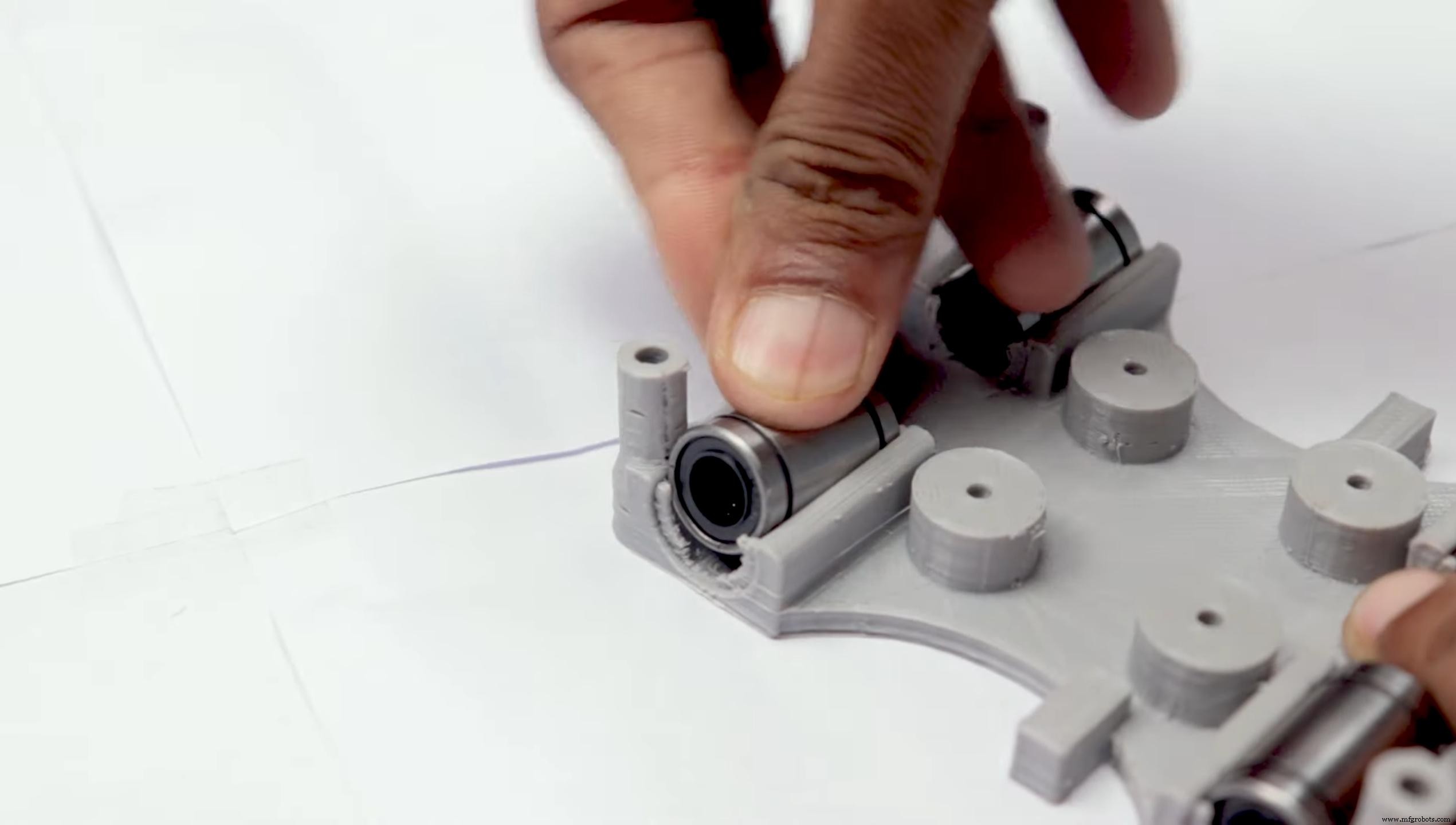


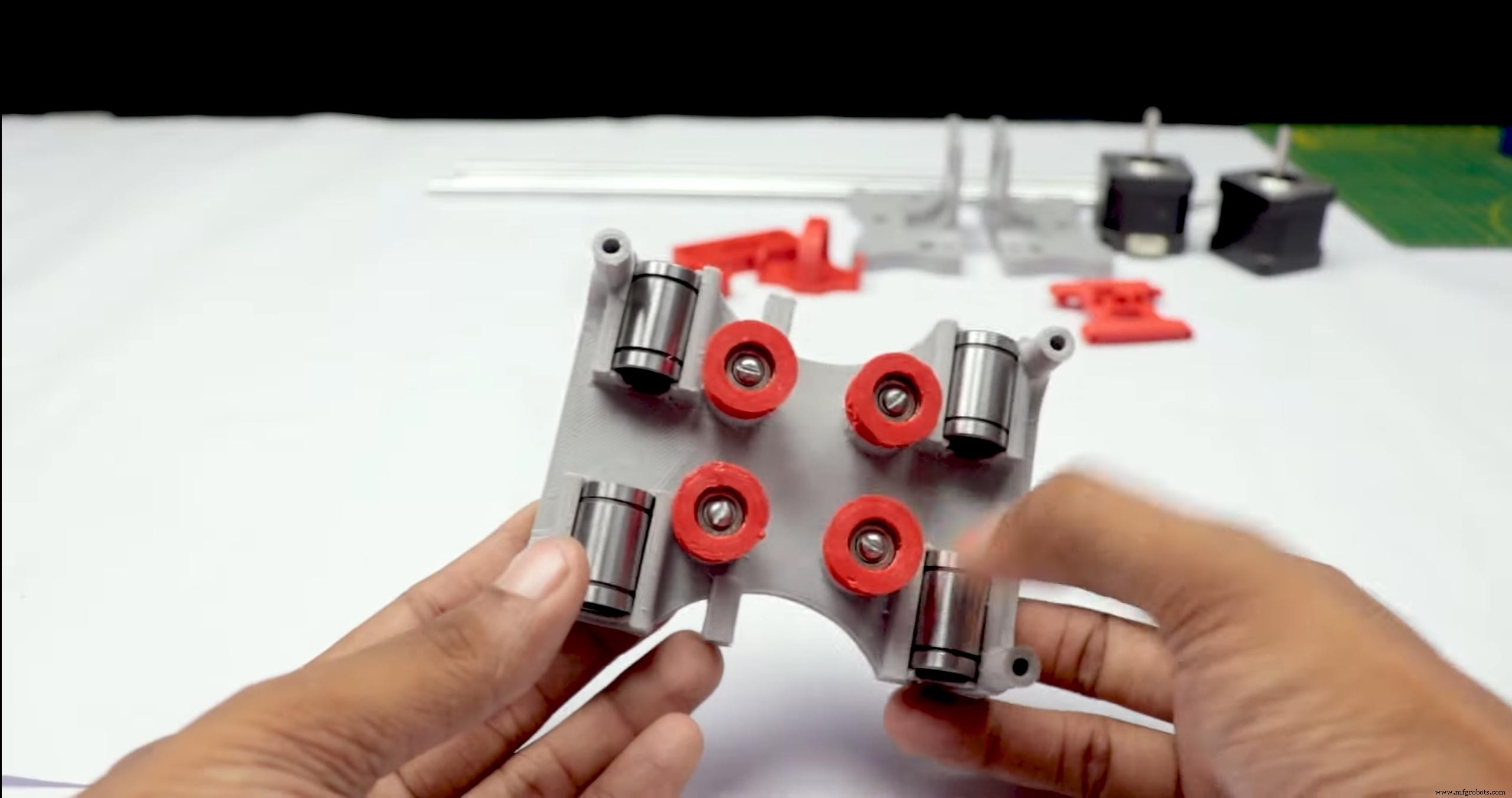
Maintenant, vous voulez pousser les roulements LM8UU à leur place sur le clapet supérieur et inférieur (les clapets supérieur et inférieur prennent chacun (4) roulements)
Prenez (4) roulements 624zz et poussez-les à travers les poulies folles imprimées en 3D. Laissez le 5e roulement pour plus tard lorsque vous assemblerez l'axe Y
Assembler l'axe X (chariot)
- Obtenez (4) vis M3-0,5 x 20 mm, (4) écrous M3, (4) rondelles M3 et (4) roulements 624zz avec les poulies de renvoi installées
- Prenez une vis et insérez une rondelle à travers elle, la rondelle reposera sur le roulement. L'écrou sera au bas du chariot, ce qui maintiendra le roulement en place
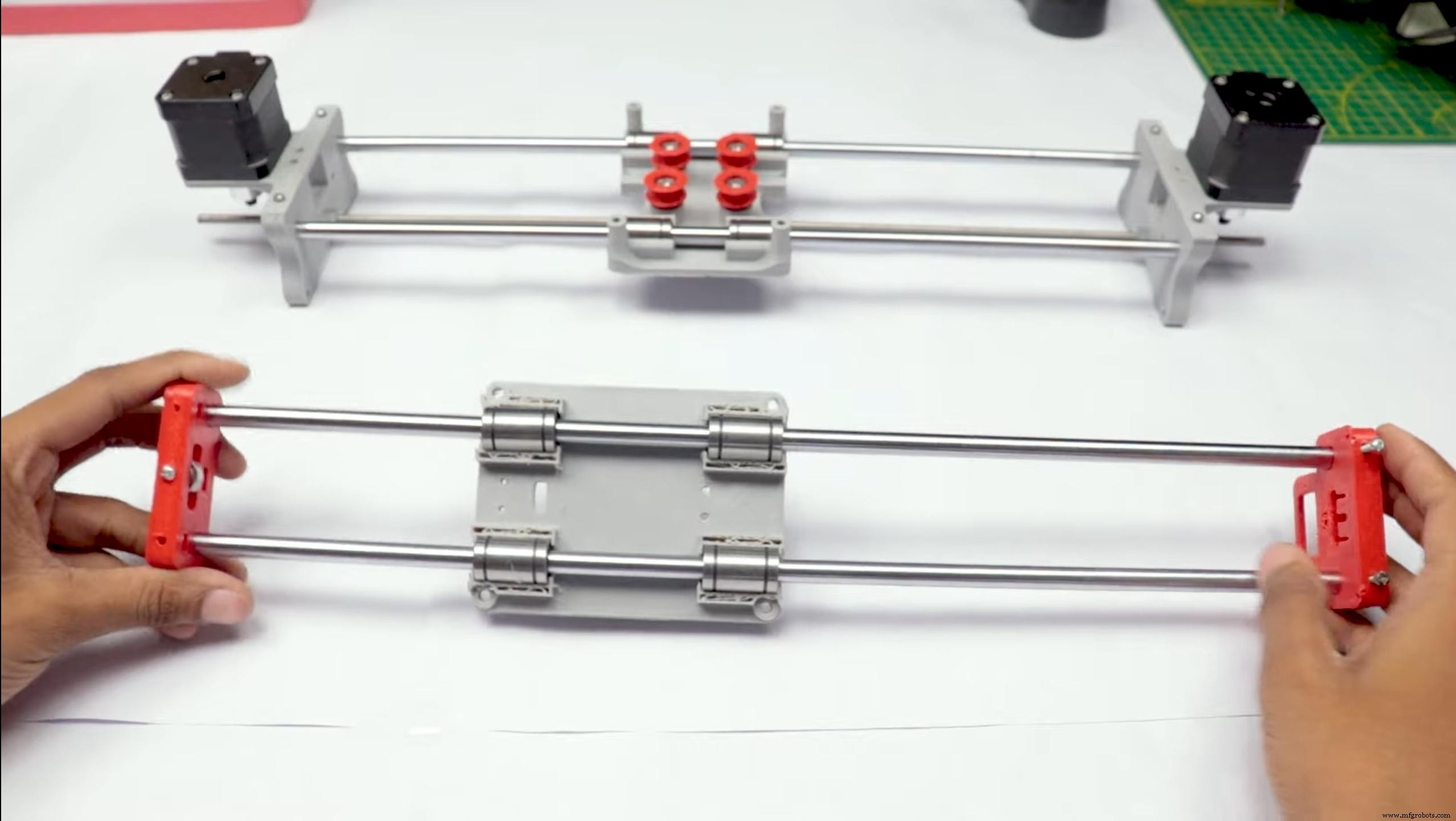
Assembler l'axe X (support X)
- Faites glisser le clapet à travers les tiges linéaires de 450 mm (axe X)
- Utilisez à nouveau un maillet en caoutchouc pour fixer le dernier support en X sur les tiges linéaires
- Assurez-vous que les tiges dépassent également des deux côtés
- Faites glisser l'autre extrémité de la tige filetée dans le trou du support X
- Mettez le dernier jeu d'écrous et de rondelles pour maintenir le support X en place
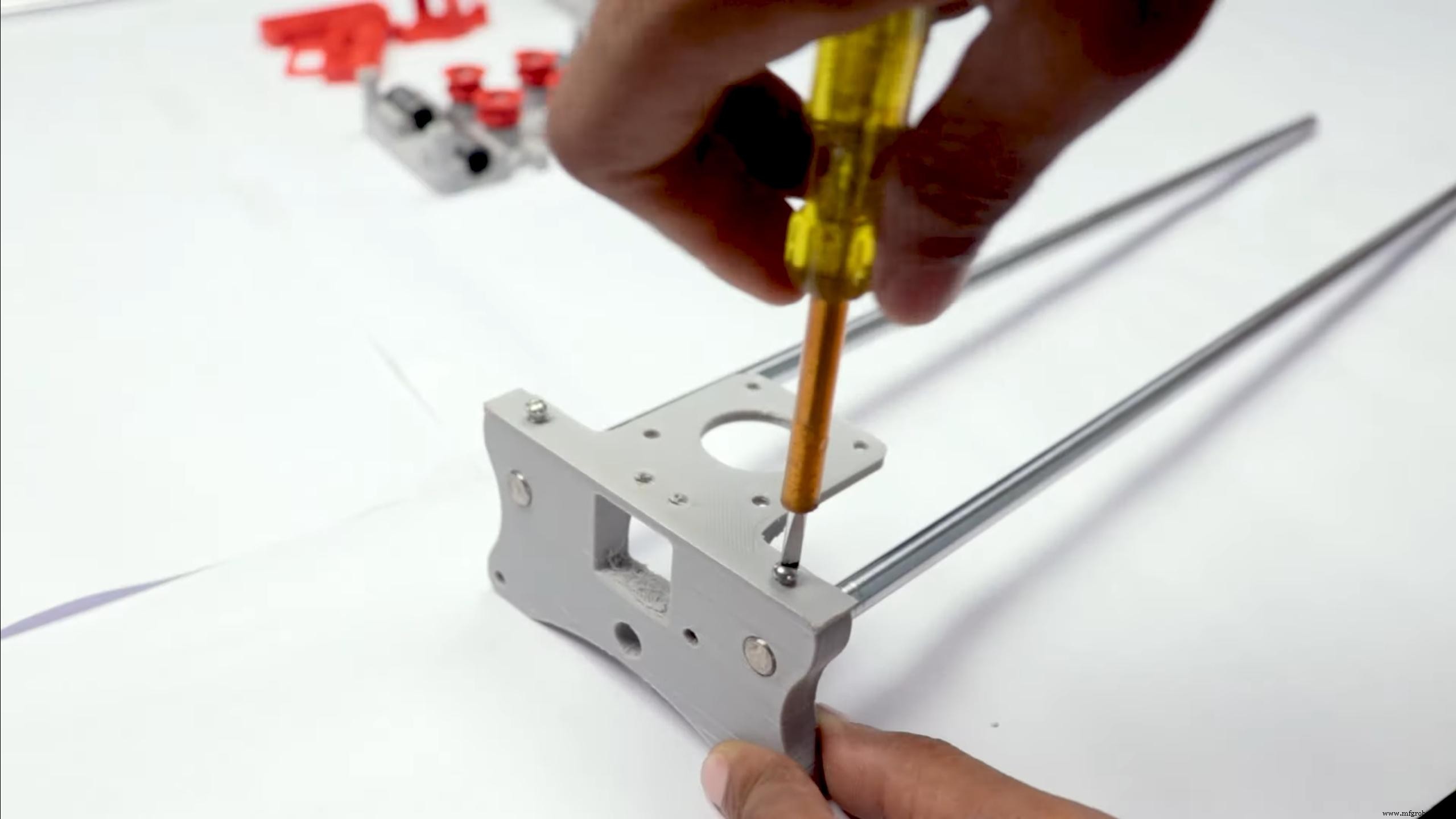
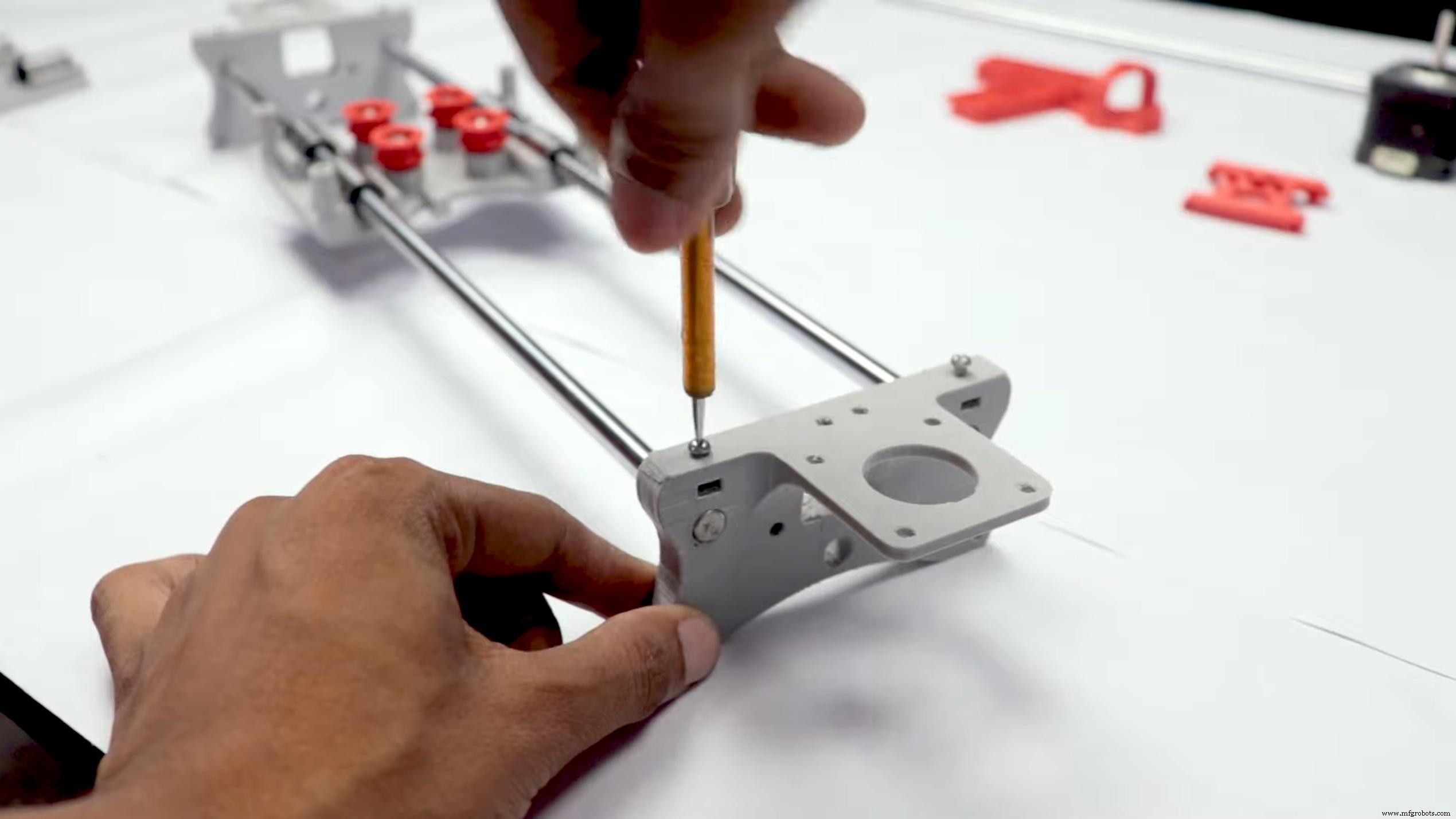
- Maintenant que l'axe X est terminé, vous pouvez utiliser (2) vis Phillips M3-0,5 x 16 mm par support X pour empêcher les tiges linéaires de glisser
Étape 5 :Assembler l'axe Y
Y-Back
- Prenez les (2) tiges linéaires de 350 mm et insérez-les dans la pièce en Y à l'aide d'un maillet en caoutchouc
- Obtenez (1) vis M4-0,5 x 35, (1) écrou M4 et le 5e roulement 624zz
- Obtenez (2) vis M3-0,5 x 16 pour fixer les tiges linéaires
- Faites glisser le roulement lors de l'insertion de la vis à travers la pièce en Y
Front en Y
- Faites glisser les tiges linéaires/pièce arrière en Y à travers les roulements LM8UU et fixez la pièce avant en Y à l'aide d'un maillet en caoutchouc
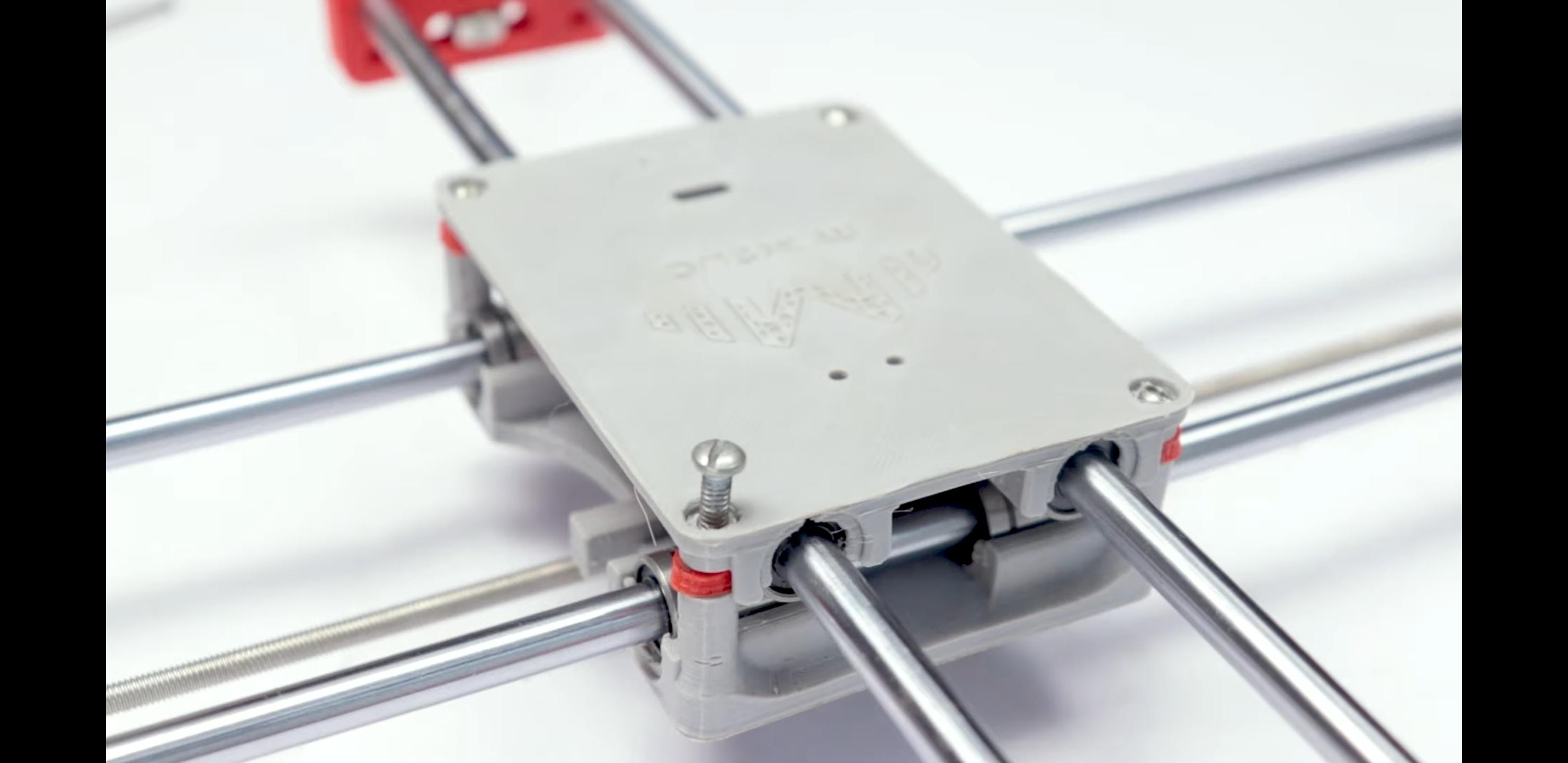
Étape 6 :Assembler l'axe X-Y (courroie)
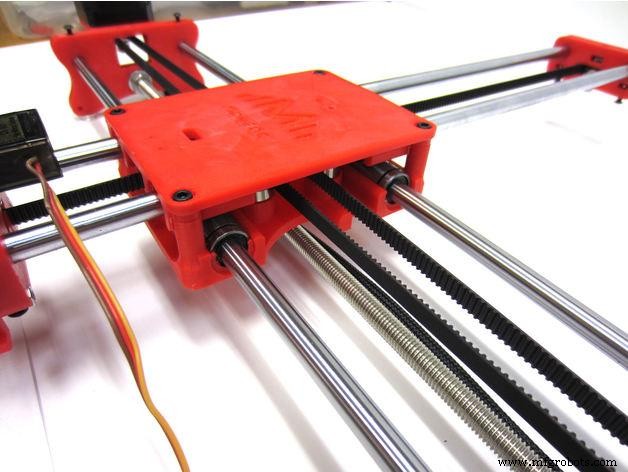

- Utilisez une paire de pinces à bec effilé pour guider la courroie GT2 plus facilement à travers la coquille
- Prenez les deux extrémités de la ceinture et faites-les glisser à travers les « dents » sur le curseur de base
- La ceinture doit être serrée et non lâche
- A noter qu'une fois la courroie GT2 en place, il est normal que la benne preneuse ne bouge pas facilement
Étape 7 :Assemblez l'axe Z

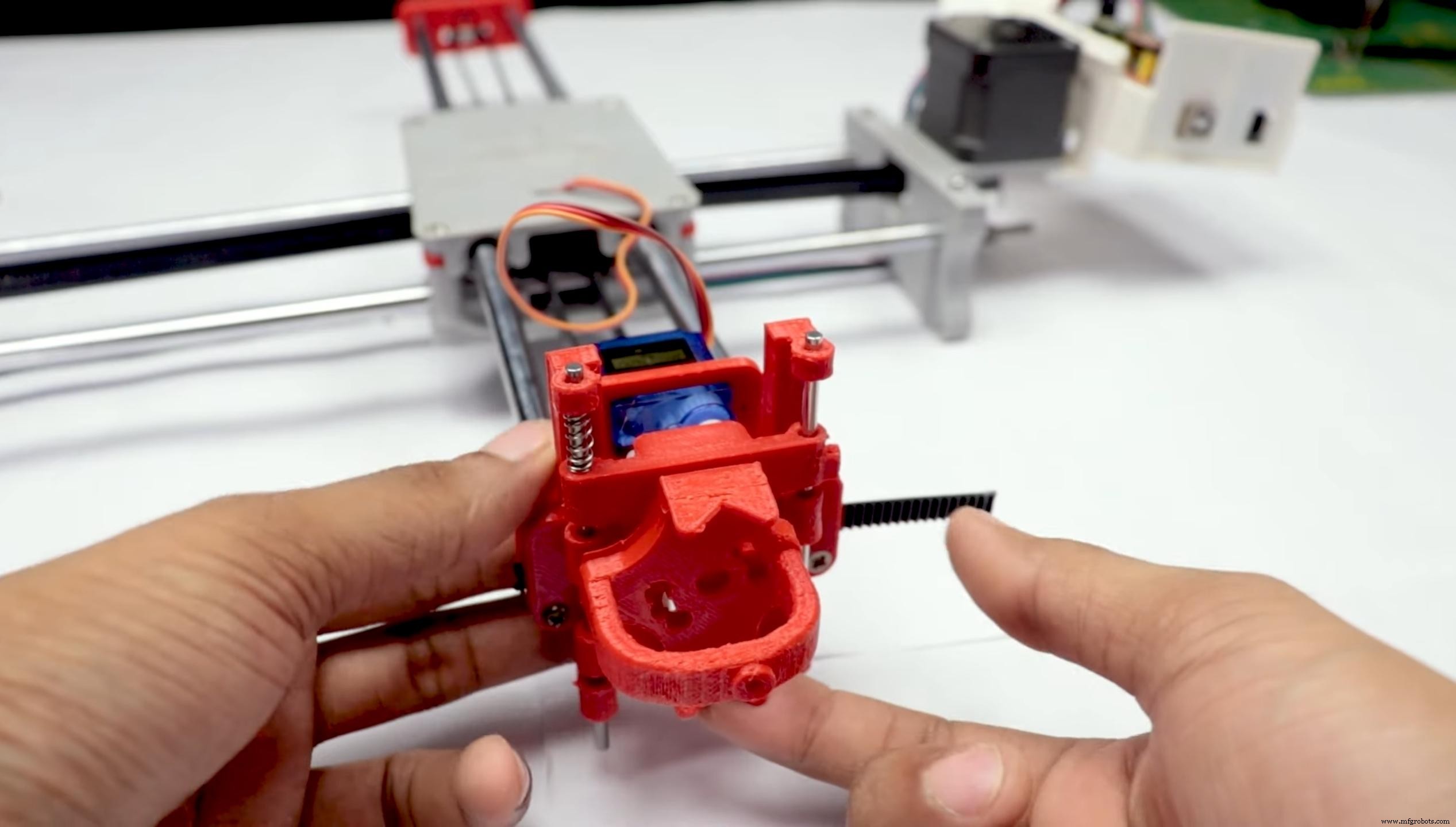
- Obtenez (2) tiges linéaires de 3 mm et les pièces imprimées en 3D suivantes (curseur, porte-stylo, glissière de base, vis à oreilles métriques de 3 MM)
- Obtenez (1) vis hexagonale M3-0,5 x 20 mm et la vis à oreilles métrique et poussez-les ensemble. Utilisez de la superglue pour le garder ensemble.
- Obtenez (3) vis M3-0,5 x 16 mm que vous utiliserez pour fixer la glissière de base à la partie avant en Y. Vous devrez peut-être utiliser (3) écrous M3-0,5 pour le maintenir en place
- Poussez le curseur et le porte-stylo ensemble pour former une seule pièce
- Maintenant, prenez cette nouvelle pièce et les (2) tiges linéaires de 3 mm et faites glisser les tiges dans les trous. Placez un petit ressort entre les deux parties afin qu'il y ait un peu de pression pour soulever le curseur. Vous devrez peut-être couper un peu le ressort jusqu'à ce qu'il y ait une pression adéquate sur le curseur.
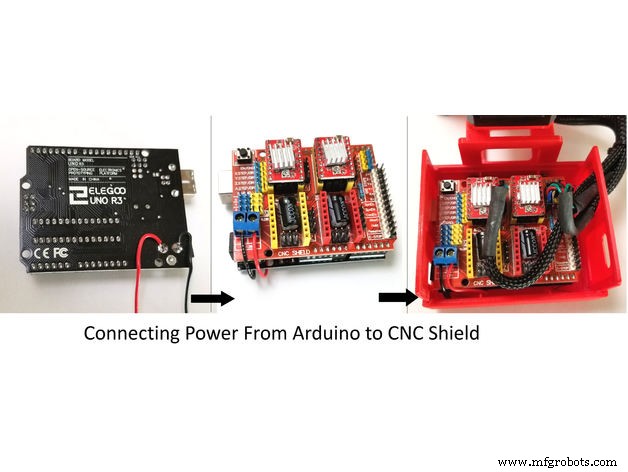
Étape 8 :ÉLECTRONIQUE
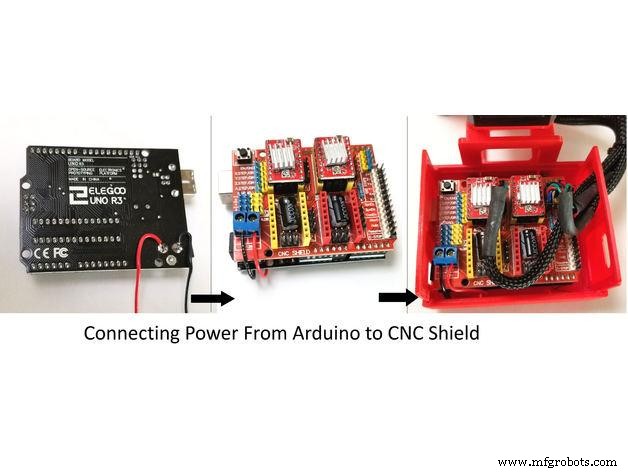
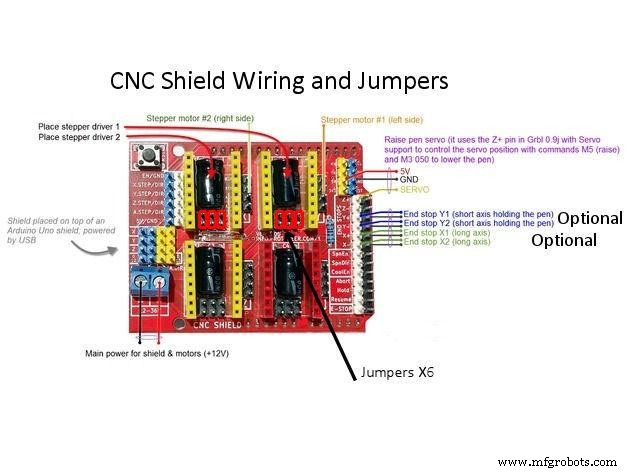

ÉLECTRONIQUE
Je préfère que vous puissiez utiliser Arduino uno CNC Shield
Prêt à tout votre circuit
1) 4pcs A4988 Pilote de moteur pas à pas
2) Pilote de la carte d'extension A4988
3) Arduino UNO Tout d'abord, prenez l'évier et collez le pilote de moteur A4988.
Le pilote de moteur pas à pas 4pcs A4988 se connecte sur la carte d'extension A4988, puis connecte l'arduino avec la carte d'extension et connecte tout le câblage. ferait, nous pouvons faire bouger les moteurs de 1/16 ou 1/32 de pas pour faire bouger le laser avec la plus grande précision possible. Cependant, les moteurs consommeront plus d'électricité :ils chaufferont plus vite.
Pour utiliser les modes de micro-pas, raccourcissez certaines des broches de mode ensemble. Différentes combinaisons donnent des résolutions différentes. Consultez le tableau pour les différentes configurations possibles. Lorsque le blindage est programmé, ajoutez-y les pilotes A4988 et câblez le reste de l'électronique.
Pour trouver les bobines des moteurs pas à pas, utilisez un multimètre. S'il y a une résistance entre les deux fils, vous avez une bobine. Sur le schéma, les bobines sont représentées par deux fils de même couleur.
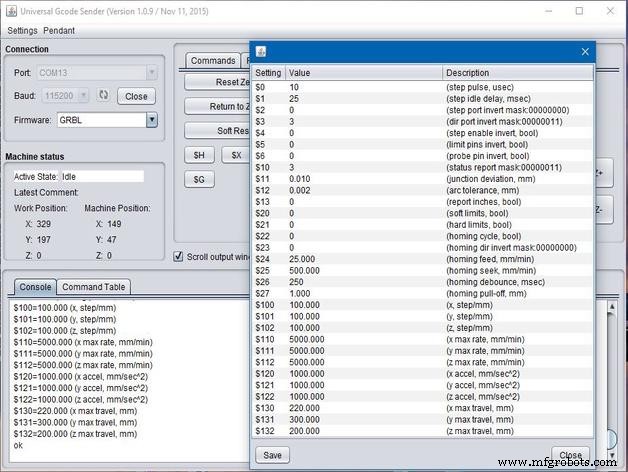
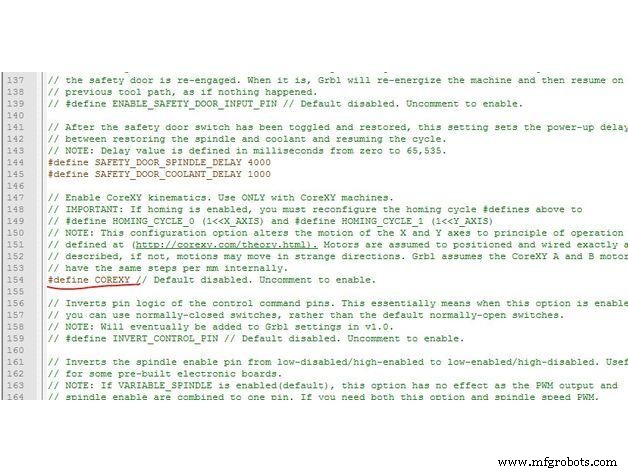
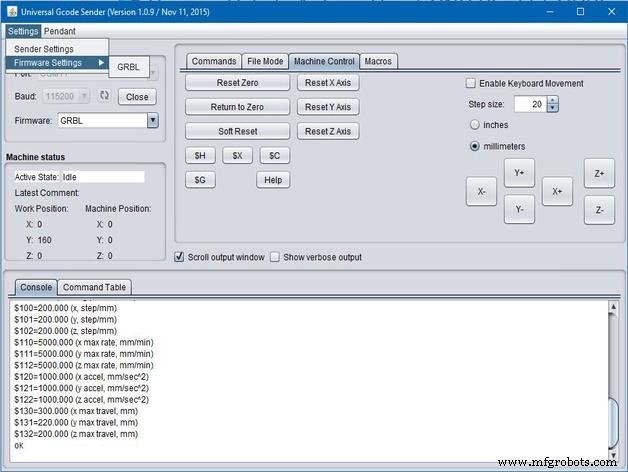
Étape 9 :LOGICIEL
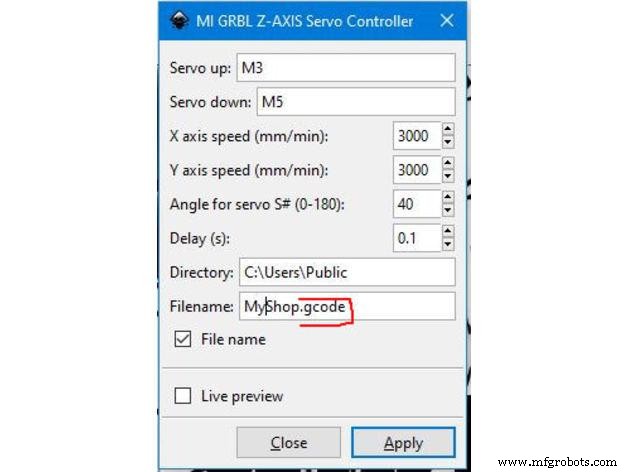
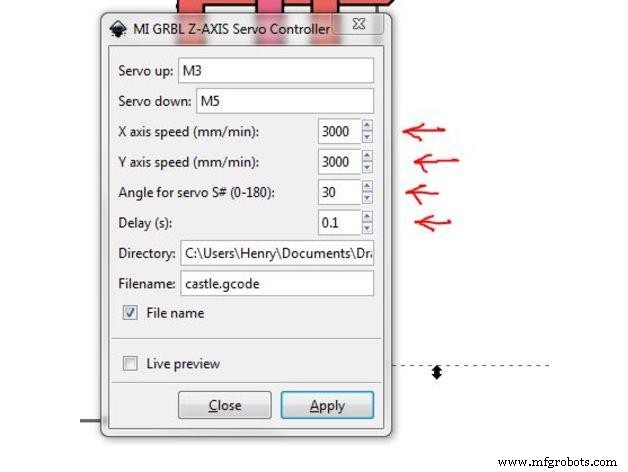
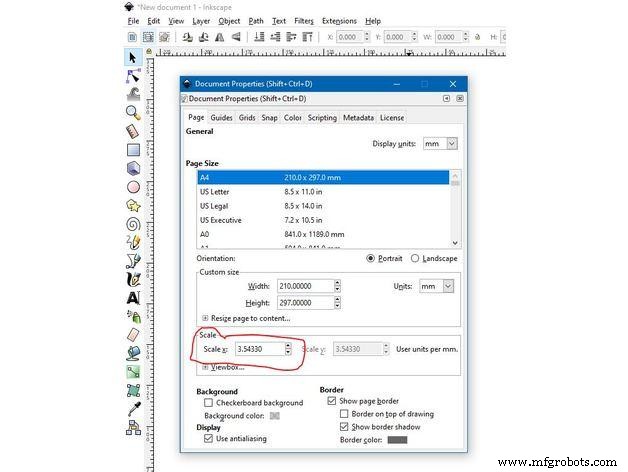
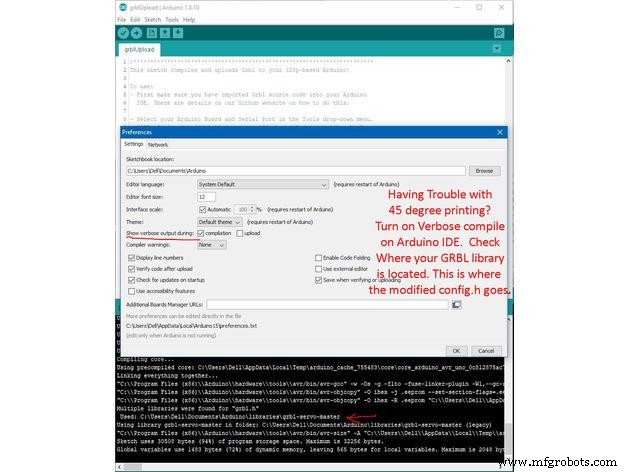
Inkscape qui est le logiciel de conception graphique (dessiner ou importer des graphiques)
Inkscape MI GRBL Extension (convertir les graphiques en G-Code)Universal G Code Sender (envoie le G-Code au robot provoquant le mouvement de dessin)GRBL qui est le firmware Arduino (programmé dans l'Arduino Uno)
Arduino :https://www.arduino.cc/en/software
Expéditeur universel de code G :https://winder.github.io/ugs_website/...
Inkscape :https://inkscape.org/release/inkscape..
Laser 4xiDraw &km :https://drive.google.com/file/d/1YO8-...
Traitement :https://processing.org/download/
dessin au traitement du code G :https://drive.google.com/file/d/1PIFx...
regarder la vidéo pour la configuration complète
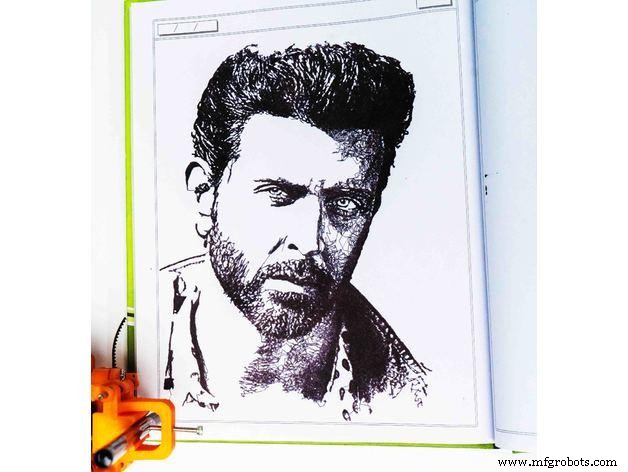
Étape 10 :Machine à dessiner au travail
Code
- code grbl
code grblArduino
Schémas
Processus de fabrication
- Robot suiveur de ligne
- Plateforme de formation Arduino
- Robot assistant domestique autonome
- Machine CNC
- Bras de robot Arduino DIY – Contrôlé par des gestes de la main
- Moniteur d'accueil
- Comment fabriquer un mini oscilloscope à la maison avec Arduino Nano
- Idée de bricolage avec RFID
- Machine à griffes maison