


Tutoriel sur les servomoteurs pour les débutants – Electronicslovers.com
Les servomoteurs sont également largement utilisés en ROBOTIQUE comme dans INDUSTRIES, le servo est au cœur des projets ROBOTIQUE de nos jours tels que bras robotique, voitures RC, antenne radar, bandes transporteuses, positionnement d'antenne, autofocus de caméra, processus d'impression, etc.
Dans de nombreux projets de loisirs, les servomoteurs sont largement utilisés. J'espère que cet article vous fournira de brèves informations sur ce qu'est réellement un servomoteur, le principe de fonctionnement de base d'un servomoteur, différentes variétés de servomoteurs, une comparaison de base entre un servomoteur et un moteur à courant continu normal.

Définition du servomoteur :
" C'est un appareil qui fournit un mouvement en réponse à une commande lorsqu'il régule le mouvement en réponse à un retour négatif. "
La principale caractéristique du servo est de contrôler avec précision la position de son arbre. Il s'agit essentiellement d'un système en boucle fermée (c'est-à-dire une rétroaction négative).
Il y a quatre parties principales dans le système d'asservissement en boucle fermée :
- Moteur à courant continu.
- Circuit de contrôle.
- Engrenages.
- Capteur de retour de position.
La partie principale d'un servomoteur est un petit moteur à courant continu. Ces moteurs à courant continu ont une vitesse élevée (c'est-à-dire un régime élevé) et un couple très faible (c'est-à-dire une force de torsion responsable de l'exécution du travail). Fondamentalement, les petits moteurs à courant continu ont une vitesse très élevée mais n'ont pas un couple beaucoup plus élevé (c'est-à-dire une petite force et une plus grande distance). Mais la conception des engrenages à l'intérieur du servo convertit cette vitesse élevée et ce faible couple d'un moteur à courant continu en une vitesse plus lente et un couple plus élevé (c'est-à-dire une petite distance, une plus grande force).
De nombreux moteurs à courant continu sont plus rapides autour de 5 000 tr/min, mais les engrenages réduisent ce régime très élevé à environ 60 tr/min et un couple élevé. Les servos qui sont peu coûteux ont leurs engrenages en plastique afin de maintenir leur poids plus léger et à faible coût, tandis que les servos conçus pour les travaux plus lourds (c'est-à-dire un couple très élevé) ont leurs engrenages en métal pour, par exemple, les servos utilisés dans les industries .
Lorsque la puissance est appliquée pour la première fois au servo via la ligne d'entrée, le moteur à courant continu tourne à un régime très élevé et à un couple très faible, mais en raison des engrenages, l'arbre du servo est ralenti.
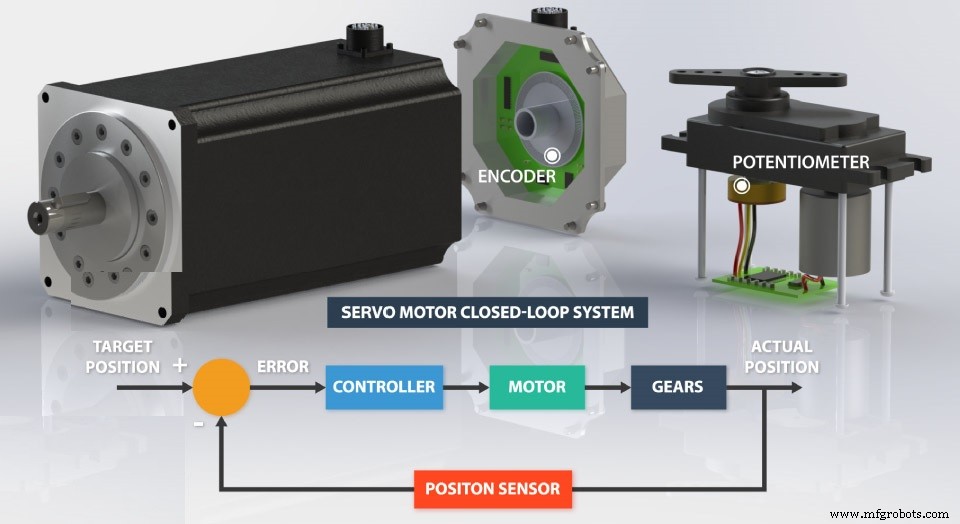 Étant donné que le capteur de retour de position est connecté dans un agencement de retour négatif afin de contrôler la position d'un servo avec précision pour le poste souhaité. Dans les servomoteurs industriels, le capteur de retour de position est un encodeur de haute précision, mais dans un passe-temps, le capteur de position des servomoteurs est un potentiomètre. Le capteur de position (c'est-à-dire le potentiomètre) sur l'engrenage final est connecté au circuit qui contient le détecteur d'erreur (c'est-à-dire que ce détecteur d'erreur est essentiellement un comparateur qui compare deux signaux, l'un provenant de la ligne d'entrée également appelée position cible et l'autre de la sortie via un potentiomètre également appelé position réelle) et un circuit intégré de contrôleur intégré à la carte.
Étant donné que le capteur de retour de position est connecté dans un agencement de retour négatif afin de contrôler la position d'un servo avec précision pour le poste souhaité. Dans les servomoteurs industriels, le capteur de retour de position est un encodeur de haute précision, mais dans un passe-temps, le capteur de position des servomoteurs est un potentiomètre. Le capteur de position (c'est-à-dire le potentiomètre) sur l'engrenage final est connecté au circuit qui contient le détecteur d'erreur (c'est-à-dire que ce détecteur d'erreur est essentiellement un comparateur qui compare deux signaux, l'un provenant de la ligne d'entrée également appelée position cible et l'autre de la sortie via un potentiomètre également appelé position réelle) et un circuit intégré de contrôleur intégré à la carte.
En raison de la rotation des engrenages, le bouton du potentiomètre tourne, en conséquence, les tensions sont produites qui sont connectées au détecteur d'erreur. Maintenant, l'erreur produite en raison de la comparaison de deux signaux par le comparateur, qui est connecté au circuit intégré du contrôleur (c'est-à-dire que ce contrôleur est un pont en H intégré sur une puce). Après comparaison, une erreur est produite qui permet au contrôleur de décider de la rotation de l'arbre dans les deux sens afin d'atteindre la position cible. 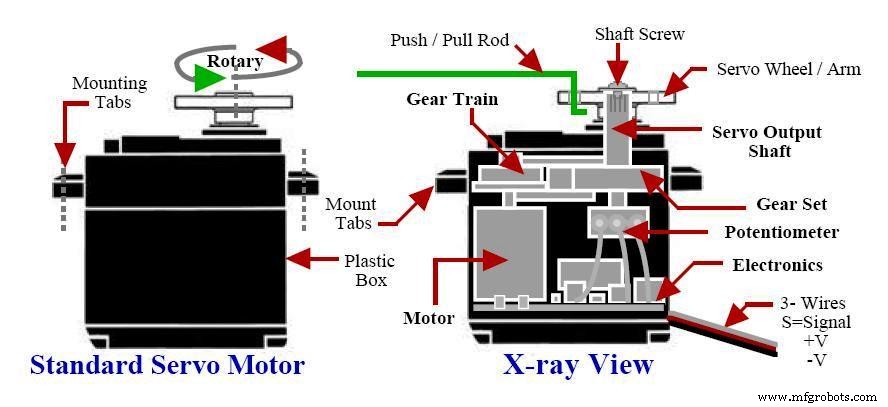
Types de SERVOS :
Les servos sont disponibles en différentes variétés.
- SERVO DE ROTATION DE POSITION :
L'arbre de sortie ne tournera que de 180 degrés. Des butées supplémentaires sont situées pour limiter la rotation supplémentaire de l'arbre en dehors de sa plage (par exemple :bras ROBOTIC, gouvernails, etc.)
- SERVO DE ROTATION CONTINUE :
Il est similaire au servo de rotation de position, mais il peut tourner sur 360 degrés en continu. Les commandes envoyées au servo le feront tourner dans le sens des aiguilles d'une montre ou dans le sens inverse des aiguilles d'une montre à une vitesse variable (par exemple :parabole RADAR, etc.).
- SERVO LINÉAIRE :
Le mouvement de ce servo est dans le sens aller-retour plutôt que dans le sens circulaire (par exemple :machine CNC, imprimantes 3D, etc.).
COMPARAISON DE BASE ENTRE SERVO ET MOTEUR DC :
Les servomoteurs peuvent tourner à 180 degrés d'avant en arrière, mais les moteurs à courant continu peuvent tourner à 360 degrés tant qu'ils sont alimentés. De nos jours, le servo est également disponible en rotation continue qui peut tourner à 360 degrés, mais en raison de la conception de l'engrenage, la vitesse du servo est inférieure à celle du moteur à courant continu. Les moteurs à courant continu sont le meilleur choix pour les robots à fonctionnement libre, tandis que lorsque nous avons besoin de précision (par exemple :BRAS ROBOTIQUE, essuie-glaces, gouvernails de bateau, etc.), le servo est le meilleur choix.
La vitesse du moteur à courant continu est contrôlée par la technique PWM (modulation de largeur d'impulsion) (c'est-à-dire qu'en faisant varier le rapport cyclique, nous pouvons contrôler la vitesse du moteur à courant continu). Par exemple :un rapport cyclique supérieur à 50 % signifie que la vitesse est plus rapide, un rapport cyclique inférieur à 50 % signifie que la vitesse est plus lente.
Alors que la technique PWM dans les servomoteurs détermine la position de son arbre plutôt que sa vitesse. Une fois la commande envoyée au servo, il réglera précisément la position de l'arbre à la position souhaitée. Ainsi, ce comportement réglable automatiquement de son arbre fait du servo le choix parfait pour l'application ROBOTIQUE.
Technologie industrielle
- Renesas étend les options de microcontrôleur pour la servocommande dans les robots industriels
- Construire des robots Raspberry Pi :meilleur tutoriel pour les débutants
- Robot Pi simple
- Langage de programmation C PDF :Tutoriel de base pour les débutants
- Experts en réparation de servomoteurs Fanuc
- Conseils pour les réparations et le dépannage des servomoteurs
- À quel type de découpe laser le servomoteur est-il adapté ?
- Câbles moteur pour variateurs de vitesse
- Un aperçu pour les débutants :qu'est-ce que la fabrication métallique ?