


Protection moteur – Types de défauts et dispositifs de protection
Types de pannes de moteur et dispositifs de protection
Défaillances et pannes courantes du moteur
Il est important de connaître et de comprendre les pannes et les défauts du moteur définir les dispositifs de protection les plus adaptés pour chaque cas . Vous devez également connaître les termes importants liés au contrôle et à la protection des moteurs.
Être des machines non statiques moteurs sont soumis à des contraintes électriques et mécaniques .
Pannes de moteur existent en trois types de base :électrique, mécanique et mécanique qui progresse en électricité .
Types courants de pannes de moteur et de défauts sont :
- Panne de roulement
- Panne d'isolation
- Rotor bloqué
- Surchauffe
- Surcharges (électriques et mécaniques)
- Un déséquilibre de phase et tout déséquilibre de tension entraîneront un déséquilibre de courant encore plus élevé.
- Fonctionnement en marche arrière
- Désalignement de l'arbre
- Vibrations
Surchauffe peut se produire à cause du sous-dimensionnement du moteur , refroidissement insuffisant à basse vitesse lors de l'utilisation de variateurs de vitesse (VSD ), modifications de la charge sur le moteur comme l'équipement bloqué et conditions ambiantes chaudes .
Panne d'isolation , entraînant des enroulements brûlés , implique un court-circuit soit dans le moteur, soit dans le circuit d'alimentation du moteur , et peut être causé par une surchauffe, des surcharges et des surtensions .
Environ 80 % de pannes de moteurs électriques sont le résultat de dommages d'enroulement dans le stator du moteur et de défauts de roulement .
Échec du roulement sur les moteurs peut être une indication des mauvais roulements pour l'application .
Un moteur monté verticalement nécessite des roulements différents puis un moteur monté horizontalement . Un moteur entraînant un entraînement large ou multi-courroies nécessitera des roulements qui supportent de grosses charges radiales . Un moteur boulonné à une plaque de base déformée se tordra .
Relèvements sont généralement petits par rapport aux autres composants majeurs du moteur , les rendant particulièrement vulnérables aux dommages et à l'usure; certaines études attribuent plus de la moitié de toutes les pannes de moteur à un dysfonctionnement des roulements , dont la plupart résultent de trop peu ou trop de lubrification . Une autre cause importante de défaillance des roulements est un désalignement .
Désalignement de l'arbre va détruire roulements bien avant leur pleine vie professionnelle . L'arbre moteur doit être directement aligné avec l'arbre qu'il entraîne ce qui ne peut être réalisé en utilisant des techniques d'alignement de précision comme laser .
Autres problèmes qui peuvent se produire avec les moteurs sont :
- Pénétration d'eau et de poussière dans les bobines du stator ou la boîte à bornes entraînant des courts-circuits
- Pieds du moteur à pied souple boulonnés hors de niveau
- Mauvais montage du moteur ou type de boîtier
- Balourd électrique ou mécanique
Bruit indique des problèmes moteurs mais ne cause généralement pas de dommages . Bruit , cependant, est généralement accompagné de vibrations .
Vibration peut causer des dommages de plusieurs manières . Il a tendance à secouer les enroulements et endommage mécaniquement l'isolation en craquant, écaillant ou abrasant le matériau . La fragilisation des fils conducteurs due à un mouvement excessif et aux étincelles de brosse au niveau des commutateurs ou des anneaux collecteurs de courant résulte également des vibrations.
Enfin, la vibration peut accélérer la défaillance des roulements en provoquant des billes vers des paliers lisses "brinnell" être déformé ou les boîtiers se desserrer dans les coques .
Chaque fois que des bruits ou des vibrations se trouvent dans un moteur en fonctionnement, la source doit être rapidement isolé et corrigé .
Ce qui semble être une source évidente de bruit ou de vibration peut être le symptôme d'un problème caché. Par conséquent, une enquête approfondie est souvent nécessaire.
Bruit et vibrations peut être causé par un arbre moteur mal aligné ou peut être transmis au moteur de la machine entraînée ou du système de transmission de puissance . Ils peuvent également être le résultat d'un déséquilibre électrique ou mécanique dans le moteur .
Déséquilibre électrique se produit lorsque l'attraction magnétique entre le stator et le rotor est inégal autour de périphérie du moteur . Cela fait fléchir l'arbre lorsqu'il tourne en créant un balourd mécanique . Déséquilibre électrique indique généralement une panne électrique comme un enroulement de stator ou de rotor ouvert , un open bar ou ring dans les moteurs à cage d'écureuil ou bobines de champ court-circuitées dans les moteurs synchrones . Un entrefer irrégulier, généralement dû à des paliers lisses très usés, produit également un déséquilibre électrique .
Les principales causes de balourd mécanique inclure un montage déformé, un arbre tordu, un rotor mal équilibré, des pièces détachées sur le rotor ou de mauvais roulements . Bruit peut également provenir du ventilateur frappant le cadre, le carénage ou des objets étrangers à l'intérieur du carénage . Si les roulements sont mauvais , comme indiqué par un bruit de roulement excessif , il est nécessaire de déterminer pourquoi les roulements ont échoué .
Un autre problème auquel les moteurs peuvent être confrontés est un long temps de démarrage . Si un moteur est soumis à de nombreux démarrages successifs , les enroulements du rotor ou les barres du rotor peut être échauffé jusqu'à un point où les connexions électriques entre les barres du rotor et les bagues d'extrémité sont endommagées .
Dispositifs de protection du moteur
Peu importe la tension et la taille nominales les moteurs sont protégés contre les surintensités (court-circuit) et les surcharges .
Moteurs BT de petite et moyenne taille sont généralement uniquement protégés contre les surcharges et les courts-circuits et gros moteurs BT et moteurs MT ont également d'autres protections .
Protections contre les surcharges et les surintensités doit être conçu pour être insensible aux courants d'appel au moment du démarrage , pour éviter coupure de courant intempestive .
Pour les moteurs BT la protection contre les surintensités et les courts-circuits peut être effectué par des fusibles , associés à des interrupteurs-sectionneurs ou des disjoncteurs à déclenchement instantané qui répondent immédiatement (presque instantané ) valeurs de courant provenant d'un court-circuit, d'un défaut à la terre ou d'un courant de rotor bloqué .
Disjoncteurs à temps inverse disposent de fonctions de déclenchement thermique et instantané et sont préréglés pour déclencher à des niveaux normalisés .
Il s'agit du type de disjoncteur le plus couramment utilisé dans les métiers du bâtiment pour la construction résidentielle, commerciale et lourde.
L'action thermique de ce disjoncteur réagit à la chaleur . Si les entrées et sorties de ventilation d'un moteur ne sont pas suffisantes pour dissiper la chaleur des enroulements du moteur, la chaleur sera détectée par l'action thermique du disjoncteur .
Si court-circuit doit se produire, l'action magnétique du disjoncteur détectera les valeurs instantanées du courant et déclenchera le disjoncteur .
Fusibles ne sont généralement pas adaptés à la protection contre les surcharges , car si dimensionné pour fournir une protection contre les surcharges , ils exploseraient au démarrage du moteur en raison du courant d'appel élevé du moteur , bien qu'ils puissent être utilisés comme protection de secours contre les surcharges .
Protection par fusibles présente le risque de dommage monophasé au moteur quand un seul fusible saute sauf si une protection monophasée est fournie; ce sujet sera abordé plus loin dans ce chapitre.
Moteurs BT et moteurs MT de grande taille sont protégés contre les courts-circuits (phase-phase et phase-terre ) par des relais de surintensité (50 ; 50N ; 51 ; 51N ) connecté à CT .
La protection contre les surcharges est normalement assuré par un relais de surcharge thermique . Ce relais peut être des types suivants :
Bande bimétallique
Une protection contre les surcharges thermiques s'adaptera le court courant de démarrage élevé d'un moteur tout en protégeant avec précision à partir d'une surcharge de courant en cours . Le serpentin chauffant et l'action du bilame introduire un délai qui donne au moteur le temps de démarrer et de s'installer dans le courant de fonctionnement normal sans déclenchement de surcharge thermique . Protections contre les surcharges thermiques peut être réinitialisable manuellement ou automatiquement en fonction de leur application et disposent d'un ajusteur qui leur permet d'être précisément réglés sur le courant de fonctionnement du moteur .
Température ambiante dans lequel un démarreur et un moteur sont situés doit être pris en compte lors de la sélection des relais à bilame parce qu'une température ambiante élevée réduit le temps de déclenchement de surcharge .
Réduction du temps de déclenchement de surcharge peut entraîner des déclenchements intempestifs si un moteur est situé à une température ambiante inférieure à celle du démarreur et conduit à l'épuisement du moteur lorsque le moteur est situé à une température ambiante plus élevée que le démarreur .
La plupart des dispositifs de surcharge thermique sont conçus pour une utilisation à une température maximale de 40 ºC , et un déclassement du relais peut être nécessaire .
La plupart des relais sont réglables sur une plage à partir de 85 % à 115 % de leur valeur.
Certains modèles sont disponibles avec compensation ambiante . Un appareils à compensation ambiante point de départ n'est pas affecté par la température ambiante et fonctionne de manière cohérente à la même valeur de courant.
Ce type de relais est couramment utilisé sur les moteurs BT de petite et moyenne taille .
Les normes et les données des fabricants indiquent généralement le point de consigne de régulation recommandé de ce type de relais en fonction de la puissance nominale du moteur; les mêmes tableaux indiquent également les courants nominaux recommandés des fusibles (type aM ou gG – voir Section 2.4) et disjoncteurs instantanés qui sont associés aux relais de protection contre les surintensités , comme indiqué dans le tableau 3.
Tableau 3 – Courant nominal des fusibles pour la protection du moteur 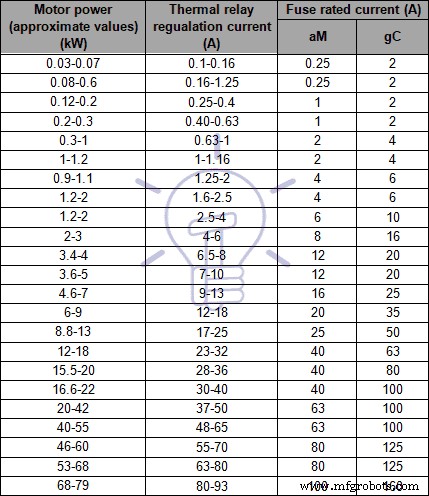
Relais de surcharge numériques électroniques
Ce type de protection est utilisé pour les gros moteurs BT et moteurs HT , et contient un microprocesseur . Ces dispositifs peuvent modéliser l'échauffement des enroulements du moteur en surveillant le courant du moteur et ils peuvent également inclure des fonctions de mesure et de communication.
Protection commune des gros moteurs BT et moteurs MT est généralement effectué par les dispositifs de protection suivants :
- Protection contre les surcharges :49
- Surintensité de phase instantanée :50
- Surintensité de courant de terre instantanée :50N/50G
- Surintensité de phase temporisée :51
- Surintensité temporisée à la terre :51N/51G
Dans certaines situations il est déconseillé de protéger les moteurs contre les surcharges; c'est le cas des pompes à eau anti-incendie et des ventilateurs de désenfumage .
Très gros moteurs BT et moteurs MT sont chers, et il est généralement sage de fournir des programmes de protection plus complets . Ces schémas incluent :
- Surveillance et protection de la température des roulements (38 )
- Protection différentielle (87M )
- Séquence de démarrage incomplète / protection de temps de démarrage long (66 )
- Séquence de phase négative (protection contre l'inversion de phase )
- Protection contre la surchauffe
- Protection contre les déséquilibres de phase ou les défaillances de phase (47 )
- Protection contre le blocage ou le blocage du rotor
- Protection contre les sous-tensions et les surtensions (27 et 59 , respectivement)
- Moniteurs de vibration et protection (39)
- Moniteurs de température de bobinage et dispositifs de protection
Protection différentielle pour moteurs BT et HT
Protection différentielle est souvent fourni pour les moteurs de taille moyenne et grande avec des tensions d'alimentation supérieures à environ 4 kV , et à commande électrique (déclencheur de dérivation )disjoncteurs . La protection différentielle fournit la direction à grande vitesse et l'élimination des défauts sur les enroulements du stator du moteur .
- Lire également :Comment calculer la taille du câble pour les moteurs LT et HT
Là où le système d'alimentation est solidement mis à la terre, la protection différentielle détectera défauts phase-phase et phase-terre .
Avec protection différentielle le courant à chaque extrémité de chaque enroulement est comparé pour déterminer quand une condition de défaut existe .
Cette fonction nécessite deux ensembles de CT , l'un au début du départ moteur, et l'autre au point étoile .
La fonction de protection différentielle ne peut être utilisé que si les deux côtés de chaque phase du stator sont sortis du moteur pour une connexion externe de sorte que le courant de phase entrant et sortant de chaque phase peut être mesuré . L'élément différentiel soustrait le courant sortant de chaque phase du courant entrant dans chaque phase et compare le résultat ou la différence avec le niveau de détection différentiel.
Si cette différence est égale ou supérieure au niveau de ramassage, un voyage se produira .
La Figure 19 montre un exemple de cette protection. 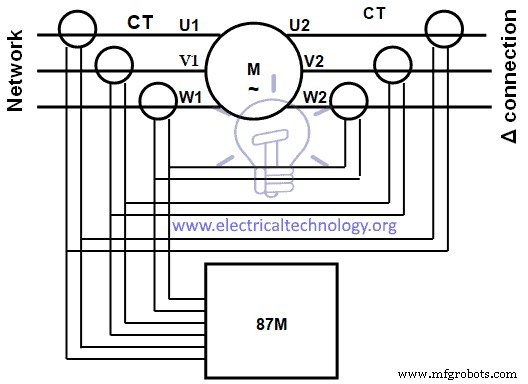
Figure 19 – Protection différentielle du moteur
Utiliser six CT dans une configuration de sommation , lors du démarrage du moteur, les valeurs des deux TC sur chaque phase peuvent ne pas être égales l comme CT ne sont pas parfaitement identiques et courants asymétriques peut faire en sorte que le TC de chaque phase ait des sorties différentes .
Pour éviter les déclenchements intempestifs dans cette configuration, le niveau différentiel peut devoir être défini moins sensible , ou la délai différentiel peut devoir être prolongé pour traverser la période problématique lors du démarrage du moteur .
Le délai différentiel d'exécution peut ensuite être affiné à une application telle qu'elle répond très rapidement et est sensible aux faibles niveaux de courant différentiel .
Surchauffe des enroulements la protection est généralement effectuée avec des détecteurs de température à résistance (RTD ) et thermistance et dispositifs d'arrêt automatique peut être installé. Fixation d'un ventilateur d'appoint séparé pour aider le ventilateur du moteur résout le problème de surchauffe lorsqu'un VSD est utilisé pour contrôler le moteur sp besoin.
Séquence de démarrage incomplète/long temps de démarrage provoque une surchauffe du rotor .
Comme il n'est pas possible de mesurer physiquement la chaleur du rotor sur les moteurs à cage d'écureuil est nécessaire pour déterminer la chaleur en mesurant le courant que le rotor tire à travers le stator pour exciter le rotor. Une réplique thermique du rotor est établi à l'aide d'un I 2 t courbe .
L'interdiction de redémarrage empêchera l'utilisateur de démarrer le moteur si le relais a déterminé que le rotor a atteint une température qui endommagera le rotor devrait-on tenter un démarrage . Le relais n'autorisera donc qu'un redémarrage si le rotor a une réserve thermique suffisante pour démarrer .
Protection de roulement est généralement effectué par RTD et thermistor pour surveiller la température .
Protection contre les vibrations utilise des capteurs/accéléromètres qui sont généralement placés à des endroits clés sur le moteur et les roulements .
Depuis les relèvements sont la partie supportant la charge de la transmission mécanique, les accéléromètres doit être placé sur l'entrée et la sortie
La Figure 20 montre un exemple de capteurs de vibrations et d'emplacements recommandés. 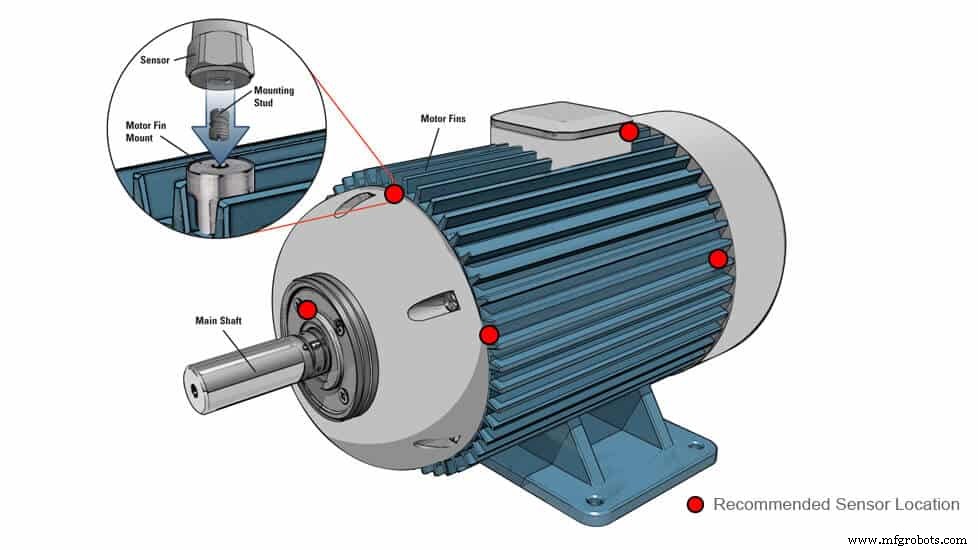
Figure 20 – Capteurs de vibration du moteur
Aujourd'hui IED (voir section 2.1) qui regroupent toutes les fonctions de protection requises sont couramment utilisés pour les gros moteurs BT et moteurs MT .

À propos de l'auteur :Manuel Bolotinha
-Licence en Génie Électrique – Systèmes énergétiques et électriques (1974 – Instituto Superior Técnico/Université de Lisbonne)– Master en Génie Électrique et Informatique (2017 – Faculdade de Ciências e Tecnologia/Nova University of Lisbon)
/> – Consultant senior en sous-stations et systèmes électriques ; Formateur professionnel
Technologie industrielle
- Qu'est-ce que le prototypage rapide ? - Types et fonctionnement
- Qu'est-ce que la fabrication additive ? - Types et fonctionnement
- Qu'est-ce que la soudure ? - Types et comment souder
- Qu'est-ce que les laminoirs et leurs types?
- Qu'est-ce que le soudage par résistance ? - Types et fonctionnement
- Qu'est-ce que le sable de moulage ? - Types et propriétés
- Qu'est-ce que la projection thermique ? - Types et application
- Types de machines à décharge électrique (EDM), avantages et inconvénients
- Types d'opérations de tour et outils de coupe