


Qu'est-ce qu'un moteur pas à pas ? Types, construction, fonctionnement et applications
Types de moteurs pas à pas – Leur construction, leur fonctionnement et leurs applications
L'invention de cartes de commande de moteur pas à pas dédiées et d'autres technologies de contrôle numérique pour interfacer un moteur pas à pas aux systèmes basés sur PC sont la raison de l'acceptation généralisée des moteurs pas à pas ces derniers temps. Les moteurs pas à pas deviennent le choix idéal pour les systèmes d'automatisation qui nécessitent un contrôle précis de la vitesse ou un positionnement précis ou les deux.
Comme nous savons que de nombreux moteurs électriques industriels sont utilisés avec un contrôle de rétroaction en boucle fermée pour obtenir un positionnement précis ou un contrôle précis de la vitesse, d'autre part, un moteur pas à pas capable de fonctionner sur un contrôleur en boucle ouverte. Cela réduit à son tour le coût total du système et simplifie la conception de la machine par rapport à la commande du système d'asservissement. Discutons brièvement du moteur pas à pas et de ses types . 
- Article connexe :servomoteur – types, construction, fonctionnement et applications
Qu'est-ce qu'un moteur pas à pas ?
Moteur pas à pas est un dispositif électromécanique sans balai qui convertit le train d'impulsions électriques appliquées à leurs enroulements d'excitation en une rotation d'arbre mécanique pas à pas définie avec précision. L'arbre du moteur tourne d'un angle fixe pour chaque impulsion discrète. Cette rotation peut être linéaire ou angulaire. Elle obtient un mouvement de pas pour une seule entrée d'impulsion.
Lorsqu'un train d'impulsions est appliqué, il est tourné d'un certain angle. L'angle de rotation de l'arbre du moteur pas à pas à chaque impulsion est appelé angle de pas, généralement exprimé en degrés.
Le nombre d'impulsions d'entrée données au moteur détermine l'angle de pas et, par conséquent, la position de l'arbre du moteur est contrôlée en contrôlant le nombre d'impulsions. Cette caractéristique unique rend le moteur pas à pas bien adapté au système de contrôle en boucle ouverte dans lequel la position précise de l'arbre est maintenue avec un nombre exact d'impulsions sans utiliser de capteur de retour.
Si l'angle de pas est petit, plus le nombre de pas par tour sera grand et plus la précision de la position obtenue sera grande. Les angles de pas peuvent être aussi grands que 90 degrés et aussi petits que 0,72 degrés, cependant, les angles de pas couramment utilisés sont de 1,8 degrés, 2,5 degrés, 7,5 degrés et 15 degrés.
Le sens de rotation de l'arbre dépend de la séquence d'impulsions appliquées au stator. La vitesse de l'arbre ou la vitesse moyenne du moteur est directement proportionnelle à la fréquence (le taux d'impulsions d'entrée) des impulsions d'entrée appliquées aux enroulements d'excitation. Par conséquent, si la fréquence est basse, le moteur pas à pas tourne par pas et pour une fréquence élevée, il tourne en continu comme un moteur à courant continu en raison de l'inertie.
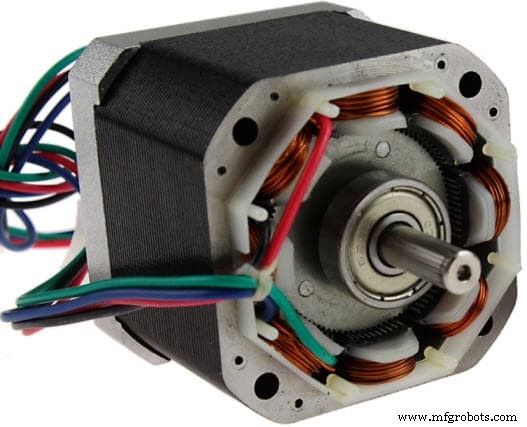
Comme tous les moteurs électriques, il possède un stator et un rotor. Le rotor est la partie mobile dépourvue d'enroulements, de balais et d'un collecteur. Habituellement, les rotors sont à réluctance variable ou à aimant permanent. Le stator est souvent construit avec des enroulements multipolaires et multiphasés, généralement des enroulements triphasés ou quadriphasés enroulés pour un nombre requis de pôles décidé par le déplacement angulaire souhaité par impulsion d'entrée.
Contrairement à d'autres moteurs, il fonctionne sur des impulsions de commande discrètes programmées qui sont appliquées aux enroulements du stator via un entraînement électronique. La rotation se produit en raison de l'interaction magnétique entre les pôles de l'enroulement de stator alimenté séquentiellement et les pôles du rotor.
Il existe plusieurs types de moteurs pas à pas sont disponibles sur le marché actuel dans une large gamme de tailles, de nombre de pas, de constructions, de câblage, d'engrenages et d'autres caractéristiques électriques. Comme ces moteurs sont capables de fonctionner de manière discrète, ils sont bien adaptés pour s'interfacer avec des dispositifs de commande numériques tels que des ordinateurs.
En raison du contrôle précis de la vitesse, de la rotation, de la direction et de la position angulaire, ceux-ci sont particulièrement intéressants dans les systèmes de contrôle de processus industriels, les machines CNC, la robotique, les systèmes d'automatisation de la fabrication et instrumentation.
- Message connexe :Moteur à courant continu sans balais - Construction, principe de fonctionnement et applications
Types de moteurs pas à pas
Il existe trois catégories de base de moteurs pas à pas , à savoir
- Moteur pas à pas à aimant permanent
- Moteur pas à pas à réluctance variable
- Moteur pas à pas hybride
Dans tous ces moteurs, les enroulements d'excitation sont utilisés dans le stator où le nombre d'enroulements se réfère au nombre de phases.
Une tension continue est appliquée comme excitation aux bobines des enroulements et chaque borne d'enroulement est connectée à la source via un interrupteur à semi-conducteurs. Dépend du type de moteur pas à pas, sa conception de rotor est construite comme un rotor en acier doux avec des pôles saillants, un rotor à aimant permanent cylindrique et un aimant permanent avec des dents en acier doux. Discutons de ces types en détail.
- Vous pouvez également lire :Connexion de moteur triphasé étoile/triangle (Y-Δ) Inverser/Avancer avec diagramme de puissance et de contrôle de la minuterie
Moteur pas à pas à réluctance variable
C'est le type de base de moteur pas à pas qui existe depuis longtemps et qui garantit la manière la plus simple de comprendre le principe de fonctionnement d'un point de vue structurel. Comme son nom l'indique, la position angulaire du rotor dépend de la réluctance du circuit magnétique formé entre les pôles du stator (dents) et les dents du rotor.

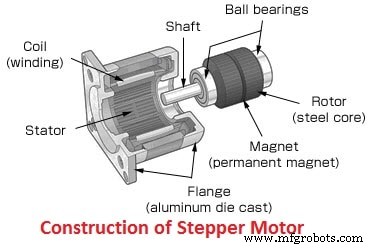
Construction d'un moteur pas à pas à réluctance variable
Il se compose d'un stator bobiné et d'un rotor multident en fer doux. Le stator comporte un empilement de tôles d'acier au silicium sur lesquelles sont enroulés des enroulements de stator. Habituellement, il est bobiné pour trois phases qui sont réparties entre les paires de pôles.
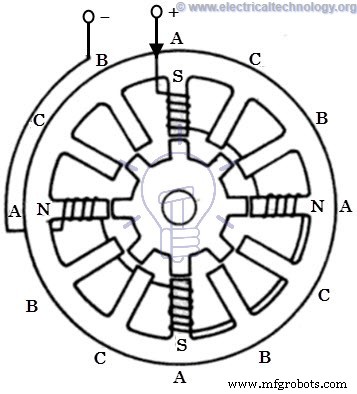
Le nombre de pôles sur le stator ainsi formé est égal à un multiple pair du nombre de phases pour lesquelles les enroulements sont enroulés sur le stator. Dans la figure ci-dessous, le stator a 12 pôles saillants également espacés où chaque pôle est enroulé avec une bobine d'excitation. Ces trois phases sont alimentées à partir d'une source CC à l'aide d'interrupteurs à semi-conducteurs.
Le rotor ne porte aucun enroulement et est de type pôle saillant entièrement constitué de tôles d'acier fendues. Les dents projetées du pôle du rotor ont la même largeur que celles des dents du stator. Le nombre de pôles sur le stator diffère de celui des pôles du rotor, ce qui permet un démarrage automatique et une rotation bidirectionnelle du moteur.
La relation des pôles du rotor en termes de pôles du stator pour un moteur pas à pas triphasé est donnée par Nr =Ns ± (Ns / q). Ici Ns =12, et q=3, et donc Nr =12 ± (12 / 3) =16 ou 8. Un rotor de construction à 8 pôles sans aucune excitation est illustré ci-dessous.
Fonctionnement du moteur pas à pas à réluctance variable
Le moteur pas à pas fonctionne sur le principe que le rotor s'aligne dans une position particulière avec les dents du pôle d'excitation dans un circuit magnétique dans lequel il existe un chemin de réluctance minimum. Chaque fois qu'une puissance est appliquée au moteur et en excitant un enroulement particulier, il produit son champ magnétique et développe ses propres pôles magnétiques.
En raison du magnétisme résiduel dans les pôles de l'aimant du rotor, le rotor se déplacera dans une telle position afin d'atteindre une position de réluctance minimale et donc un ensemble de pôles de rotor s'aligne avec le jeu de pôles sous tension du stator. À cette position, l'axe du champ magnétique du stator correspond à l'axe passant par deux pôles magnétiques du rotor.
Lorsque le rotor s'aligne avec les pôles du stator, il a suffisamment de force magnétique pour empêcher l'arbre de passer à la position suivante, dans le sens des aiguilles d'une montre ou dans le sens inverse des aiguilles d'une montre.
Considérez le schéma de principe d'un triphasé, 6 pôles de stator et 4 dents de rotor illustré dans la figure ci-dessous. Lorsque la phase A-A' est alimentée en courant continu en fermant l'interrupteur -1, le bobinage devient un aimant ce qui fait qu'une dent devient Nord et l'autre Sud. Ainsi, l'axe magnétique du stator se trouve le long de ces pôles.
En raison de la force d'attraction, le pôle nord de la bobine de stator attire la dent de rotor la plus proche de polarité opposée, c'est-à-dire que le pôle sud et le pôle sud attirent la dent de rotor la plus proche de polarité opposée, c'est-à-dire le nord. Le rotor s'ajuste ensuite à sa position de réluctance minimale où l'axe magnétique du rotor correspond exactement à l'axe magnétique du stator.
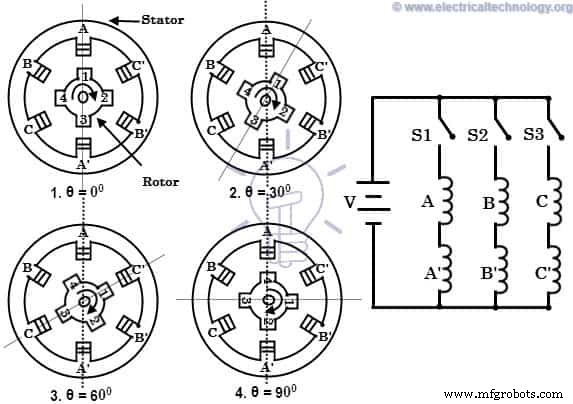
Lorsque la phase B-B' est excitée par en fermant l'interrupteur -2 en maintenant la phase A-A' hors tension en ouvrant l'interrupteur-1, l'enroulement B-B' produira le flux magnétique et donc l'axe magnétique du stator se déplacera le long des pôles ainsi formés par celui-ci. Par conséquent, le rotor se déplace à la moindre réticence avec des dents de stator magnétisées et tourne d'un angle de 30 degrés dans le sens des aiguilles d'une montre.
Lorsque l'interrupteur-3 est activé après l'ouverture de l'interrupteur-2, la phase C-C' est activée, les dents du rotor s'alignent avec la nouvelle position en se déplaçant d'un angle supplémentaire de 30 degrés. De cette manière, le rotor se déplace dans le sens des aiguilles d'une montre ou dans le sens inverse des aiguilles d'une montre en excitant successivement les enroulements du stator dans une séquence particulière. L'angle de pas de ce moteur pas à pas à dents de rotor triphasé à 4 pôles est exprimé par 360/(4 × 3) =30 degrés (comme angle de pas =360 / Nr × q).
L'angle de pas peut être encore réduit en augmentant le nombre de pôles sur le stator et le rotor, dans ce cas, les moteurs sont souvent enroulés avec des enroulements de phase supplémentaires. Ceci peut également être réalisé en adoptant une construction différente de moteurs pas à pas tels que la disposition multi-empilement et le mécanisme de démultiplication.
- Vous pouvez également lire :Schémas de connexion de moteur triphasé STAR/DELTA sans minuterie d'alimentation et de contrôle
Moteur pas à pas à aimant permanent
Le moteur à aimant permanent est peut-être le plus courant parmi plusieurs types de moteurs pas à pas. Comme son nom l'indique, il ajoute des aimants permanents à la construction du moteur. Ce type de moteurs pas à pas est également appelé moteur à empiler ou moteur de boîte de conserve . Le principal avantage de ce moteur est son faible coût de fabrication. Ce type de moteur a 48-24 pas par tour.

Moteur pas à pas à aimant permanent de construction
Dans ce moteur, le stator est multipolaire et sa construction est similaire à celle du moteur pas à pas à réluctance variable, comme indiqué ci-dessus. Il se compose d'une périphérie à fentes sur laquelle sont enroulées des bobines de stator. Il a des pôles projetés sur la structure à fentes où les enroulements bobinés peuvent être à deux, trois ou quatre phases.
Les bornes d'extrémité de tous ces enroulements sont rachetées et connectées à l'excitation CC via des interrupteurs à semi-conducteurs dans le circuit d'entraînement.
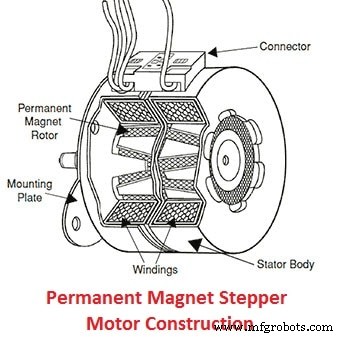
Le rotor est constitué d'un matériau à aimant permanent comme une ferrite qui peut avoir la forme d'un pôle cylindrique ou saillant, mais il est généralement de type cylindrique lisse. Le rotor est conçu pour avoir un nombre pair de pôles magnétiques permanents avec des polarités Nord et Sud alternées.
Fonctionnement du moteur pas à pas à aimant permanent
Le fonctionnement de ce moteur fonctionne sur le principe que les pôles différents s'attirent et que les pôles similaires se repoussent. Lorsque les enroulements du stator sont excités avec une alimentation en courant continu, cela produit un flux magnétique et établit les pôles Nord et Sud. En raison de la force d'attraction et de répulsion entre les pôles du rotor à aimant permanent et les pôles du stator, le rotor commence à monter jusqu'à la position pour laquelle les impulsions sont données au stator.
Considérez un moteur pas à pas biphasé avec deux pôles de rotor magnétiques permanents, comme indiqué dans la figure ci-dessous.
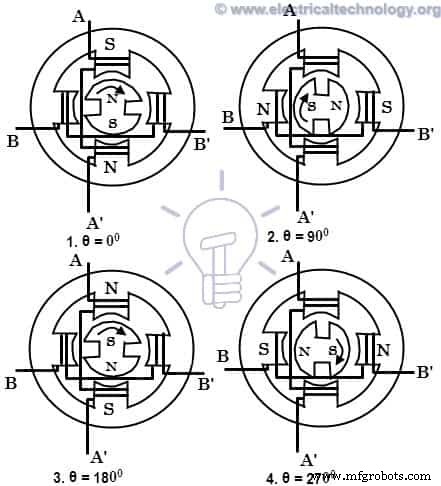
Lorsque la phase A est alimentée avec un positif avec par rapport au A', les enroulements établissent les pôles Nord et Sud. En raison de la force d'attraction, les pôles du rotor s'alignent avec les pôles du stator de sorte que l'axe du pôle magnétique du rotor s'ajuste avec celui du stator, comme indiqué sur la figure.
Lorsque l'excitation est commutée sur la phase B et que la phase A est désactivée, le rotor s'ajuste davantage à l'axe magnétique de la phase B et tourne ainsi de 90 degrés dans le sens des aiguilles d'une montre.
Ensuite, si la phase A est alimentée avec un courant négatif par rapport à A', la formation de pôles de stator fait que le rotor se déplace de 90 degrés supplémentaires dans le sens des aiguilles d'une montre.
De la même manière, si la phase B est excitée avec un courant négatif en fermant l'interrupteur de la phase A, le rotor tourne de 90 degrés supplémentaires dans le même sens. Ensuite, si la phase A est excitée avec un courant positif, le rotor revient à la position d'origine effectuant ainsi une révolution complète de 360 degrés. Cela implique que, chaque fois que le stator est excité, le rotor a tendance à tourner de 90 degrés dans le sens des aiguilles d'une montre.
L'angle de pas de ce moteur à rotor à aimant permanent biphasé à 2 pôles est exprimé par 360/ (2 × 2) =90 degrés. La taille du pas peut être réduite en alimentant deux phases simultanément ou une séquence de modes ON monophasé et ON biphasé avec une polarité appropriée.
- Vous pouvez également lire :Termes et définitions liés au contrôle et à la protection des moteurs
Moteur pas à pas hybride
C'est le type de moteur pas à pas le plus populaire car il offre de meilleures performances que le rotor à aimant permanent en termes de résolution de pas, de couple de maintien et de vitesse. Cependant, ces moteurs sont plus chers que les moteurs pas à pas PM. Il combine les meilleures caractéristiques des moteurs pas à pas à réluctance variable et à aimant permanent. Ces moteurs sont utilisés dans des applications qui nécessitent un très petit angle de pas tel que 1,5, 1,8 et 2,5 degrés.

Construction d'un moteur pas à pas hybride
Le stator de ce moteur est le même que son homologue à aimant permanent ou à réluctance. Les bobines du stator sont enroulées sur des pôles alternés. En cela, les bobines de différentes phases sont enroulées sur chaque pôle, généralement deux bobines à un pôle, ce qui est appelé une connexion bifilaire.
Le rotor est constitué d'un aimant permanent qui est magnétisé dans la direction axiale pour créer une paire de pôles magnétiques (pôles N et S). Chaque pôle est recouvert de dents régulièrement espacées. Les dents sont composées d'acier doux et de deux sections, dont sur chaque pôle sont désalignées l'une de l'autre d'un pas d'un demi-dent.
- Article connexe Pourquoi les moteurs électriques sont-ils évalués en kW au lieu de kVA ?
Fonctionnement du moteur pas à pas hybride
Ce moteur fonctionne de manière similaire à celui du moteur pas à pas à aimant permanent. La figure ci-dessus montre un moteur pas à pas hybride à 2 phases, 4 pôles et rotor à 6 dents. Lorsque la phase A-A' est excitée avec une alimentation en courant continu, en gardant B-B' non excité, le rotor s'aligne de telle sorte que le pôle sud du rotor fait face au pôle nord du stator tandis que le pôle nord du rotor fait face au pôle sud du stator.
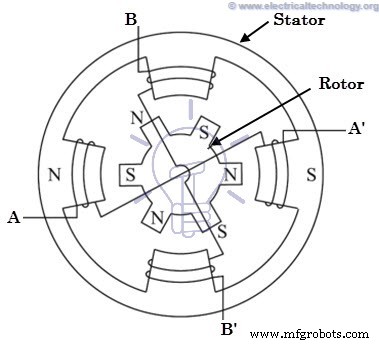
Maintenant, si la phase B-B' est excité, en gardant A-A' éteint de telle manière que le pôle supérieur devient nord et le pôle inférieur devient sud, alors le rotor s'alignera sur une nouvelle position en se déplaçant dans le sens antihoraire. Si la phase B-B' est excitée de manière opposée de sorte que le pôle supérieur devient sud et le pôle inférieur devient nord, alors le rotor tournera dans le sens des aiguilles d'une montre.
Par une séquence appropriée d'impulsions au stator, le moteur tournera dans la direction souhaitée. Pour chaque excitation, le rotor sera verrouillé dans une nouvelle position, et même si l'excitation est supprimée, le moteur maintient toujours son état verrouillé en raison de l'excitation de l'aimant permanent. L'angle de pas de ce moteur à rotor biphasé, 4 pôles et 6 dents est donné comme 360/(2 × 6) =30 degrés. En pratique, les moteurs hybrides sont construits avec un plus grand nombre de pôles de rotor afin d'obtenir une résolution angulaire élevée.
- Article connexe :Qu'est-ce que l'efficacité du moteur et comment l'améliorer ?
Moteurs pas à pas unipolaires et bipolaires
Les moteurs mentionnés ci-dessus peuvent être unipolaires ou bipolaires en fonction des dispositions d'enroulement des bobines. Un moteur unipolaire est utilisé avec deux enroulements par phase et, par conséquent, la direction du flux de courant à travers ces enroulements modifie la rotation du moteur. Dans cette configuration, le flux de courant passe par une direction dans une bobine et une direction opposée dans une autre bobine.
La figure ci-dessous montre un moteur pas à pas unipolaire biphasé dans lequel les bobines A et C sont pour une phase et B et D sont pour l'autre phase. Dans chaque phase, chaque bobine transporte du courant dans le sens opposé à celui de l'autre bobine. Une seule bobine transportera du courant à la fois dans chaque phase pour obtenir un sens de rotation particulier. Ainsi, en inversant simplement les bornes de chaque bobine, le sens de rotation est contrôlé.
Dans le cas d'un moteur pas à pas bipolaire, chaque phase se compose d'un seul enroulement au lieu de deux en cas d'unipolaire. En cela, le sens de rotation est contrôlé en inversant le courant à travers les enroulements. Par conséquent, il nécessite un circuit de commande complexe pour l'inversion du courant.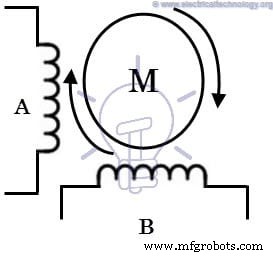
- Vous pouvez également lire :Qu'est-ce qu'un solénoïde et un champ magnétique de solénoïde
Modes pas à pas d'un moteur pas à pas
Une action de pas typique amène le moteur à parcourir une séquence de positions d'équilibre en réponse aux impulsions de courant qui lui sont données. Il est possible de faire varier l'action pas à pas de différentes manières simplement en modifiant la séquence par laquelle les enroulements du stator sont alimentés. Voici les modes de fonctionnement ou de conduite les plus courants des moteurs pas à pas.
- Pas de vague
- Étape complète
- Demi-étape
- Micropas
Mode de pas de vague
Le mode de pas d'onde est le plus simple de tous les autres modes dans lequel un seul enroulement est alimenté à un moment donné. Chaque bobine de la phase est connectée alternativement à l'alimentation. Le tableau ci-dessous montre l'ordre dans lequel les bobines sont alimentées dans un moteur pas à pas à 4 phases.
Dans ce mode, le moteur donne un angle de pas maximal par rapport à tous les autres modes. C'est le mode de progression le plus simple et le plus couramment utilisé; cependant, le couple produit est moindre car il utilise une partie de l'enroulement total à un moment donné. 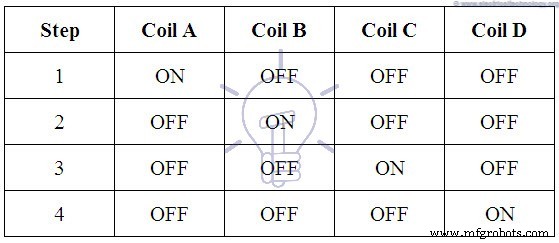
Mode pas à pas complet
Dans ce variateur ou ce mode, deux phases de stator sont alimentées simultanément à un moment donné. Lorsque deux phases sont alimentées ensemble, le rotor subira le couple des deux phases et arrivera à la position d'équilibre, qui sera entrelacée entre deux positions d'étape d'onde adjacentes ou des excitations monophasées. Ainsi, cette étape fournit un meilleur couple de maintien que l'étape d'onde. Le tableau ci-dessous montre l'entraînement pas à pas complet pour moteur pas à pas 4 phases. 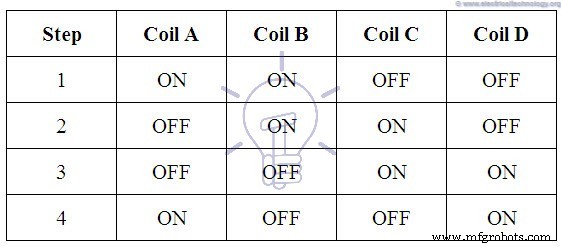
Mode demi-étape
C'est la combinaison des modes vague et pas complet. Dans ce cas, les excitations monophasées et biphasées sont réalisées alternativement, c'est-à-dire monophasées ON, biphasées ON, etc. L'angle de pas dans ce mode devient la moitié de l'angle de pas complet. Ce mode de conduite a le couple et la stabilité les plus élevés par rapport à tous les autres modes. Le tableau contenant la séquence d'impulsions de phase pour un moteur 4 phases en demi-pas est donné ci-dessous. 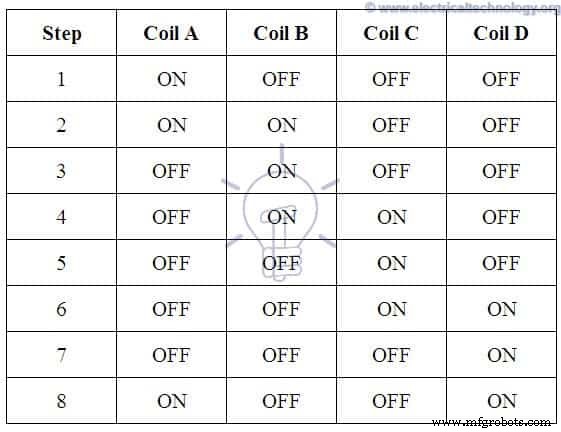
Mode de micro-pas
Dans ce mode, chaque pas du moteur est subdivisé en plusieurs petits pas, voire des centaines de positions fixes, donc une plus grande résolution de positionnement est obtenue. En cela, les courants à travers les enroulements sont continuellement variés afin d'obtenir de très petits pas. En cela, deux phases sont excitées simultanément, mais avec des courants inégaux dans chaque phase.
Par exemple, le courant à travers la phase -1 est maintenu constant tandis que le courant à travers la phase-2 est incrémenté par étapes jusqu'à la valeur maximale du courant, qu'il soit négatif ou positif. Le courant dans la phase 1 est ensuite diminué ou augmenté par paliers jusqu'à zéro. Ainsi, le moteur produira une petite taille de pas.
Tous ces modes pas à pas peuvent être obtenus par chaque type de moteur pas à pas décrit ci-dessus. Cependant, le sens du courant dans chaque enroulement lors de ces étapes peut varier en fonction du type de moteur et qu'il soit unipolaire ou bipolaire.
- Calcul de la taille du câble de poste associé pour les moteurs LT et HT
Avantages du moteur pas à pas
- En position d'arrêt, le moteur a un couple complet. Peu importe s'il n'y a pas de moment ou de changement de position.
- Il réagit bien aux positions de démarrage, d'arrêt et d'inversion.
- Comme il n'y a pas de balais de contact dans le moteur pas à pas, il est fiable et l'espérance de vie dépend des roulements du moteur.
- L'angle de rotation du moteur est directement proportionnel aux signaux d'entrée.
- Il est simple et moins coûteux à contrôler car le moteur fournit un contrôle en boucle ouverte lorsqu'il répond aux signaux d'entrée numériques.
- La vitesse du moteur est directement proportionnelle à la fréquence des impulsions d'entrée, de cette façon une large plage de vitesse de rotation peut être atteinte.
- Lorsque la charge est couplée à l'arbre, il est toujours possible de réaliser la rotation synchrone à faible vitesse.
- Le positionnement exact et la répétabilité du mouvement sont bons car ils ont une précision de 3 à 5 % d'une étape où l'erreur n'est pas cumulative d'une étape à l'autre.
- Les moteurs pas à pas sont plus sûrs et moins coûteux (par rapport aux servomoteurs), ont un couple élevé à basse vitesse, une grande fiabilité avec une construction simple qui fonctionne dans n'importe quel environnement.
Inconvénients des moteurs pas à pas
- Moteurs pas à pas à faible efficacité.
- Il a une faible précision.
- Son couple diminue très rapidement avec la vitesse.
- Comme le moteur pas à pas fonctionne en boucle ouverte, il n'y a pas de retour pour indiquer les étapes manquées potentielles.
- Il a un faible rapport couple/inertie, ce qui signifie qu'il ne peut pas accélérer la charge très rapidement.
- Ils sont bruyants.
Applications des moteurs pas à pas
- Les moteurs pas à pas sont utilisés dans les équipements de production automatisés et les jauges automobiles et les machines industrielles telles que l'emballage, l'étiquetage, le remplissage et la découpe, etc.
- Il est largement utilisé dans les dispositifs de sécurité tels que les caméras de sécurité et de surveillance.
- Dans l'industrie médicale, les moteurs pas à pas sont largement utilisés dans les échantillons, la photographie dentaire numérique, les respirateurs, les pompes à fluide, les machines d'analyse sanguine et les scanners médicaux, etc.
- Ils sont utilisés dans l'électronique grand public dans les scanners d'images, les photocopieurs et les machines d'impression et dans les appareils photo numériques pour les fonctions et positions de zoom et de mise au point automatiques.
- Moteurs pas à pas également utilisés dans les ascenseurs, les tapis roulants et les déviations de voie.
Vous pouvez également lire :
- Entraînements CC – Construction, fonctionnement et classification des entraînements CC électriques
- Schémas de câblage d'alimentation et de commande de moteur triphasé
- Bibliothèque de moteurs électriques (CA et CC)
Technologie industrielle
- Qu'est-ce que l'impression 3D ? Principe de fonctionnement | Types | Candidatures
- Qu'est-ce que l'estampage ? - Types, fonctionnement et application
- Qu'est-ce que le virage ? - Définition et types d'opérations
- Qu'est-ce que le soudage ? - Définition | Types de soudage
- Qu'est-ce que le casting ? - Définition | Types de coulée
- Qu'est-ce qu'un marteau perforateur ? - Types, conception et fonctionnement
- À quoi sert Monel ?
- Quels sont les différents types de construction de sous-sol ?
- Qu'est-ce qu'un Strongback ?