


Comment fonctionnent les capteurs de temps de vol (ToF) ? Un regard sur les caméras 3D ToF
Comment les capteurs de temps de vol déterminent-ils les distances ? En savoir plus sur les caméras ToF à l'aide d'un exemple de caméra 3D.
Comment les capteurs de temps de vol déterminent-ils les distances ? En savoir plus sur les caméras ToF à l'aide d'un exemple de caméra 3D.
Il existe trois principales technologies d'imagerie 3D en compétition pour l'espace dans votre téléphone portable et votre automobile. Ces technologies sont l'imagerie stéréoscopique, la projection de lumière structurée et les caméras à temps de vol (ou ToF). Les données générées par ces appareils peuvent permettre la détection des piétons, authentifier les utilisateurs en fonction des caractéristiques faciales, détecter les mouvements de la main et alimenter les algorithmes SLAM (localisation et cartographie simultanées).
Deux des plus grands acteurs de cet espace sont ams et Infineon. Au moment de la rédaction, ams transporte un de chaque type de capteur et Infineon se concentre uniquement sur les capteurs de temps de vol.
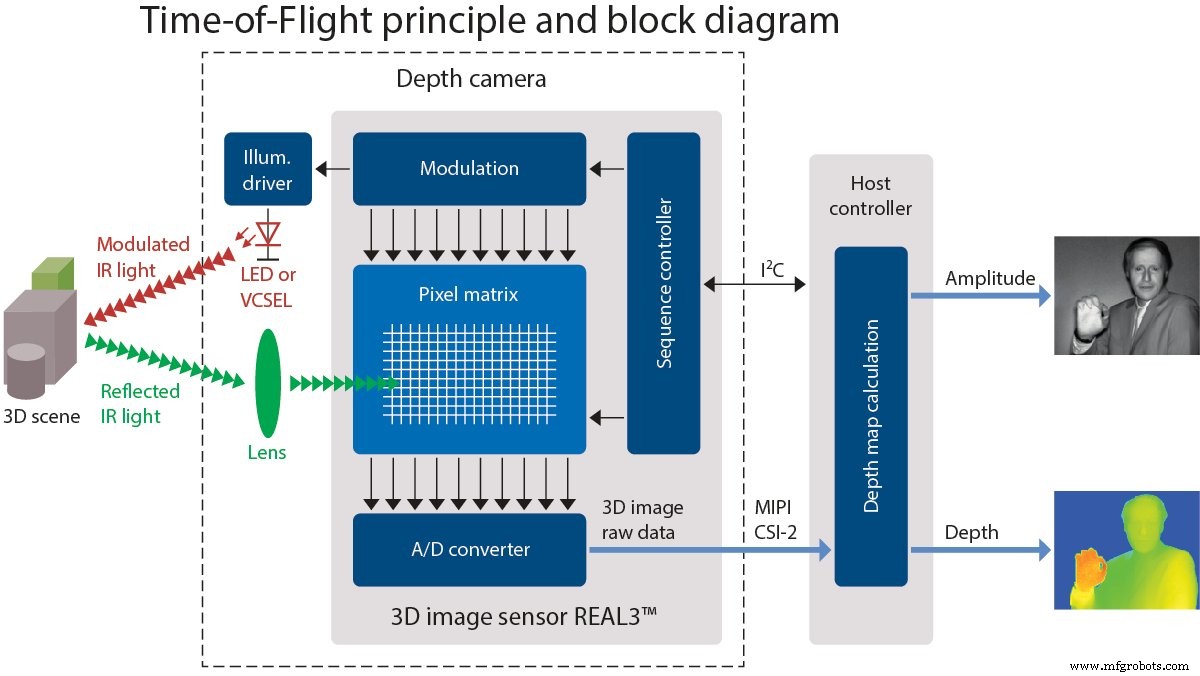
Cet article décrit la technologie derrière les capteurs de temps de vol en se concentrant sur un kit de développement de caméra 3D « pico flexx » de pmdtechnologies. (Avant de demander, "pico flexx" et "pmdtechnologies" sont présentés en minuscules sur leur site Web.).
Le pico flexx est construit autour du capteur d'image 3D REAL3 développé conjointement par Infineon et pmd.
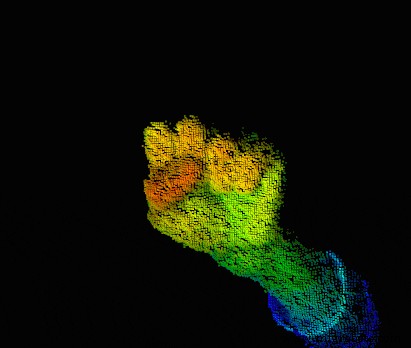
Image 3D en fausses couleurs d'une main prise sur pmdtec.com le 29 avril 2019. Les couleurs sont mappées sur des pixels individuels en fonction de la distance entre le capteur et la main (le rouge est proche, le bleu est loin)
Veuillez noter que pmd nous a fourni un appareil pour cet article.
Qu'est-ce qu'un capteur de temps de vol ?
Les capteurs de temps de vol mesurent le temps qu'il faut à quelque chose pour parcourir une distance à travers un milieu. Typiquement, il s'agit de la mesure du temps écoulé entre l'émission d'une impulsion d'onde, sa réflexion sur un objet et son retour vers le capteur ToF. Une caméra de temps de vol est un appareil qui utilise la mesure ToF pour déterminer les distances entre la caméra et des objets ou des environnements, créant des images générées par des points mesurés individuellement.
Les applications des caméras ToF incluent les systèmes d'imagerie LiDAR sans scanner à laser, la détection et le suivi de mouvement, la détection d'objets pour la vision industrielle et la conduite autonome, la cartographie topographique, etc.
Mais comment ces mesures sont-elles réalisées ?
Ci-dessous, j'ai représenté trois façons d'utiliser le temps de trajet pour déterminer la distance.
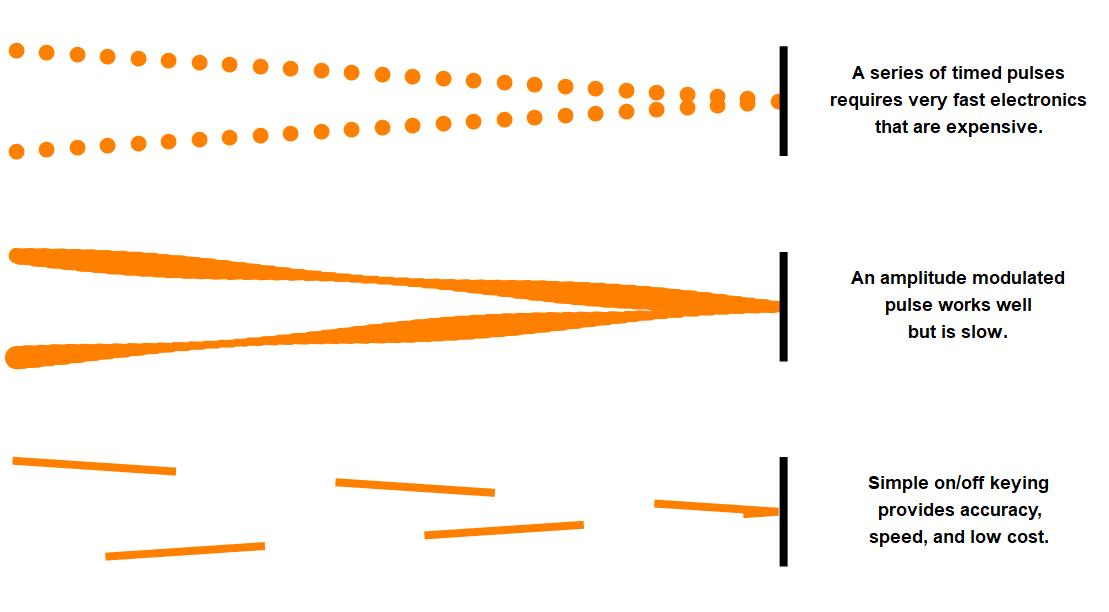
Méthodes d'utilisation du temps de trajet pour déterminer les distances
En haut de l'image, vous pouvez voir la première méthode, qui consiste à envoyer des impulsions et à mesurer l'intervalle de temps jusqu'à ce qu'elles reviennent après réflexion.
Le milieu de l'image montre la deuxième méthode, dans laquelle vous pouvez moduler l'amplitude d'une source lumineuse et enregistrer le déphasage de l'onde réfléchie.
Le bas de l'image représente la troisième méthode, transmettant une onde carrée de rapport cyclique de 50 % et enregistrant la quantité de lumière renvoyée qui arrive dans un intervalle spécifique.
Caméras ToF de précision millimétriques
Les ondes lumineuses et radio se déplacent à près de 300 000 000 000 mm/s, ce qui se traduit par environ 3,3 ps pour qu'une onde parcoure 1 mm (et 3,3 ps supplémentaires pour revenir). Cela signifie que si vous voulez un appareil capable d'imager tous les objets de la pièce dans laquelle vous vous trouvez et que vous voulez une résolution d'environ 1 mm, votre électronique de synchronisation aurait besoin d'une résolution en picosecondes. Cela se traduit par une vitesse d'horloge de centaines de GHz.
Il n'est ni facile ni économique de concevoir des circuits électroniques qui fonctionnent à ces fréquences. Les concepteurs ont donc dû trouver un moyen de travailler à des fréquences plus basses s'ils espéraient rendre les appareils abordables pour le consommateur.
Il existe deux méthodes courantes pour obtenir une précision millimétrique tout en travaillant avec des fréquences raisonnables inférieures au GHz :
- Relation entre le déphasage d'une onde modulée sinusoïdalement et la distance
- Utilisation du déphasage d'une onde carrée de rapport cyclique de 50 % et d'une tension différentielle pour déterminer la distance
Dans les sections ci-dessous, nous examinerons ces deux méthodes plus en détail.
Détermination de la distance par déphasage d'une onde modulée en amplitude
Imaginons que vous cherchiez à aménager un petit bureau ou un grand salon d'une longueur maximale de 15 m. Pour déterminer une fréquence de fonctionnement appropriée pour cette longueur, utilisez $$c=\lambda \cdot f$$ où c est la vitesse de la lumière (c=3x10 8 m/s), est une longueur d'onde (λ=15 m) et est la fréquence. Dans cet exemple, =20 MHz, qui est une fréquence relativement facile à utiliser.
Tout commence lorsqu'une lumière vive a sa sortie modulée avec un signal sinusoïdal de 20 MHz. L'onde lumineuse atteindra éventuellement un objet ou le mur et elle réfléchira et inversera les directions. Une version plus faible de la lumière modulée d'origine reviendra au récepteur. À moins que l'objet ne se trouve exactement à un multiple entier de 15 mètres, la phase sera décalée d'une certaine quantité.
Le déphasage peut être utilisé pour calculer la distance parcourue par l'onde.
Si vous pouvez mesurer avec précision l'angle de phase, vous pouvez déterminer avec précision la distance entre l'objet réfléchissant et le capteur/récepteur.
Comment mesurer l'angle de phase d'un sinusoïde
Alors, comment mesurer rapidement l'angle de phase d'une sinusoïde ? Cela implique de mesurer l'amplitude du signal reçu en quatre points également espacés (c'est-à-dire une séparation de 90° ou 1/4 ).
$$\varphi=ArcTan \left ( \frac{A_1-A_3}{A_2-A_4} \right )$$
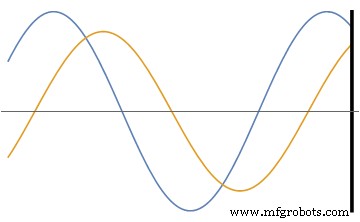
J'ai tenté d'illustrer la relation entre les mesures et l'angle de phase ci-dessous. Le rapport de la différence entre A1 et A3 et la différence entre A2 et A4 est égal à la tangente de l'angle de phase. ArcTan est en fait la fonction arc-tangente à deux arguments qui mappe les quadrants appropriés et définit quand A2 =A4 et A1>A3 ou A3>A1 comme 0° ou 180°, respectivement.
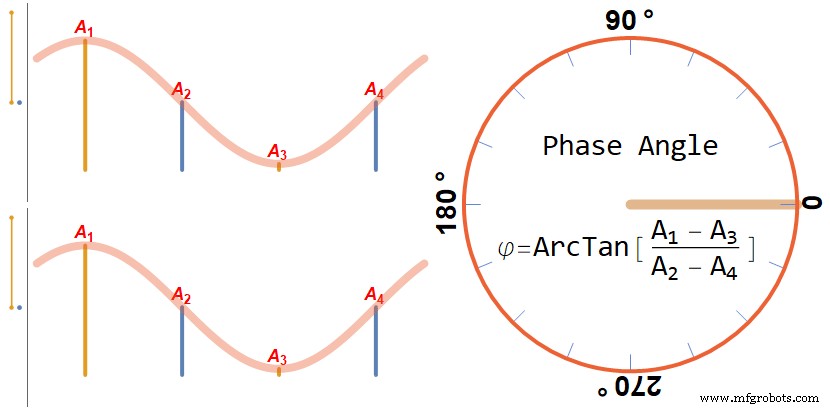
Cliquez sur le diagramme pour voir une image plus compliquée qui illustre comment les différences des variables A1 , A2 , A3 , et A4 s'adapter sur le cercle unité.
Dans l'illustration ci-dessus, l'extrême gauche du graphique a deux droites numériques verticales qui montrent le résultat de la soustraction de A1 et A3 (représenté en jaune foncé) et A2 et A4 (représenté en bleu). Les valeurs mesurées sont affichées sous forme de lignes verticales dans les graphiques sinusoïdaux au milieu.
Notez que ce graphique ne prend pas en compte la réflexion (ce qui déplacerait effectivement tout de 180°).
Détermination de la fréquence de fonctionnement pour une distance donnée
Revenons à notre exemple, la distance à la cible est déterminée avec l'équation :
$$d=\frac{c \cdot \varphi}{4 \pi \cdot f}$$
Où c est la vitesse de la lumière, phi (φ) est l'angle de phase (en radians) et est la fréquence de modulation.
Mesurer le temps de vol réel d'un photon nécessite une électronique de 333 GHz. Cette méthode nécessite au maximum 4x la fréquence de modulation, qui dans ce cas est de 4x20 MHz=80 MHz. Il s'agit d'une réduction phénoménale des ressources. Mais vous serez heureux d'apprendre que certains ingénieurs intelligents ont trouvé un moyen de réduire encore plus la fréquence maximale.
Détermination du déphasage grâce à la mesure de tension différentielle des condensateurs chargés
La prochaine situation de mesure implique une source de lumière stroboscopique et un capteur d'imagerie CMOS avec deux condensateurs par pixel.
Une source d'horloge génère une onde carrée de cycle d'utilisation de 50 % et cette onde carrée contrôle une source de lumière stroboscopique brillante, ainsi que la connexion aux condensateurs de stockage de charge à l'intérieur de chaque pixel.
Un exemple d'un tel système est représenté dans l'image ci-dessous :
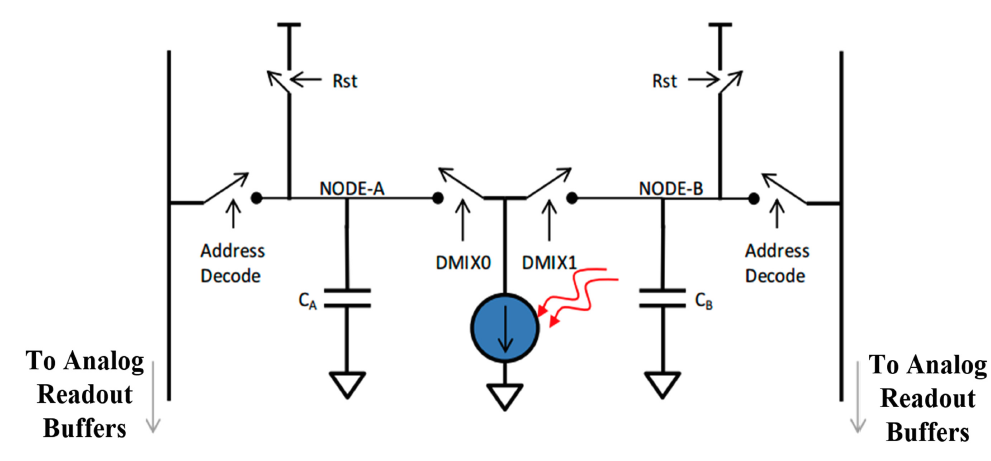
Image de "Une méthode d'étalonnage rapide pour les LiDARS à matrice solide de dispositifs de mélangeur photonique" Cela montre un pixel CMOS avec deux condensateurs de stockage de charge qui sont alternativement connectés pour enregistrer les entrées lumière.
La lumière quitte la source, se réfléchit sur un objet et frappe le pixel où elle sera enregistrée sous forme de charge dans le condensateur CA ou CB montré ci-dessus. Les condensateurs sont alternativement connectés au pixel à la même fréquence que la source d'éclairage, en utilisant la même source d'horloge.
Cette disposition astucieuse signifie que la charge différentielle dans les condensateurs est directement liée au déphasage. Et la phase est déterminée par la longueur d'onde et la distance à la cible et à l'arrière.
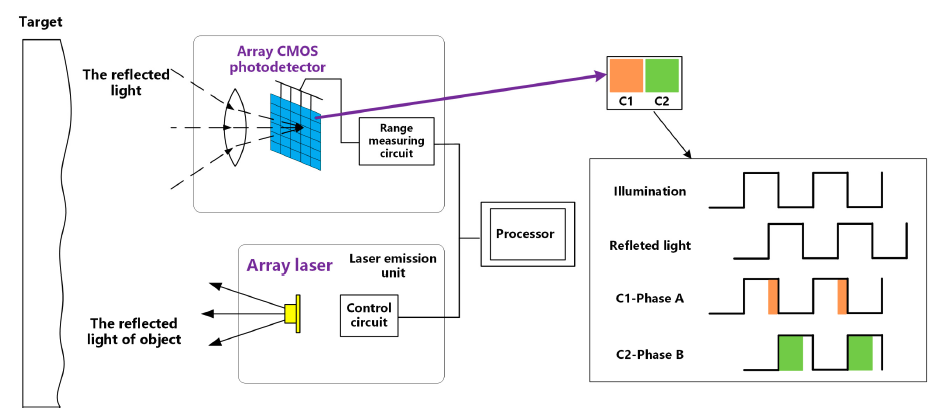
Image de « Une méthode d'étalonnage rapide pour les LiDARS à matrice solide de dispositifs photoniques de mélangeur »
Le sujet peut être éclairé autant de cycles que nécessaire pour remplir les condensateurs. Tant que la distance est constante, les proportions de charge resteront les mêmes
Capteurs de temps de vol en action
Cette méthode fonctionne-t-elle bien ? Mieux que vous ne le pensez.
Le capteur fourni à AAC, combiné avec le logiciel qui l'accompagne, a la capacité d'enregistrer jusqu'à 45 fps. À des taux de rafraîchissement inférieurs, le système peut facilement visualiser les plis d'une chemise.

L'image ci-dessus trace l'emplacement du sommet (x,y,z) de chaque pixel capturé à partir de la caméra pico flexx de pmd.
Les données de profondeur uniquement sont difficiles à visualiser par elles-mêmes. Ainsi, l'image de profondeur est souvent combinée avec une photographie, ou affichée en utilisant de fausses couleurs pour permettre une visualisation plus facile de la scène.
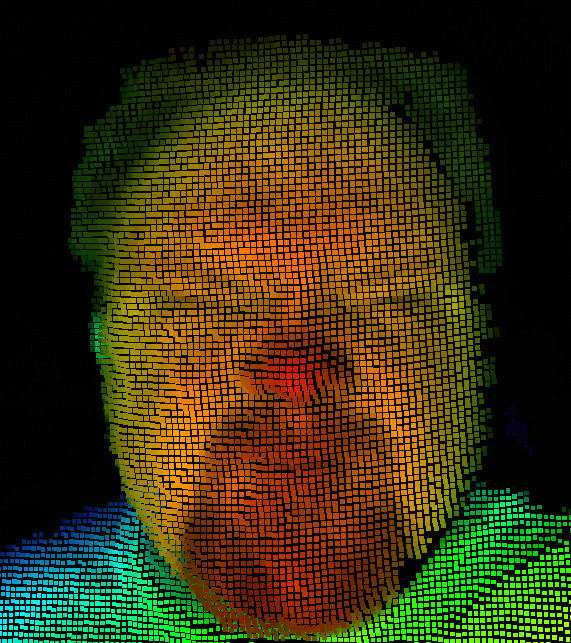
Une superposition de profondeur en fausses couleurs d'une image basse résolution facilite l'interprétation de la scène. Image de l'auteur goober capturée avec le logiciel Royal Viewer de pmd et le kit de développement 3D CamBoard pico flexx.
Les capteurs de temps de vol peuvent être utilisés dans une gamme d'applications, y compris la création d'une carte 3D de l'environnement en combinant la physique intelligente avec l'ingénierie.
Avez-vous déjà utilisé des caméras 3D dans votre travail ? Que pouvez-vous nous dire sur les contraintes de conception de l'utilisation des capteurs de temps de vol ? Partagez vos expériences dans les commentaires ci-dessous.
Technologie industrielle
- Qu'est-ce que les appels Wi-Fi ? Comment ça marche ?
- Problèmes de personnes :comment gérez-vous ?
- Comment fonctionnent les systèmes SCADA ?
- Comment fonctionne la détection des décharges partielles sur les appareillages ?
- Équipement de travail :est-il temps de procéder à une mise à niveau ?
- Comment fonctionne un moteur à courant continu brossé
- Comment fonctionnent les capteurs de niveau de Biz4Intellia - Leurs performances et leur durée de vie
- Comment réduire le temps de changement avec le SMED et le travail standard
- Comment fonctionnent les sécheurs d'air ?