


Avec l'IA, les exosquelettes robotiques gagnent en maîtrise de soi
Les chercheurs en robotique développent des jambes d'exosquelette qui font leurs pas par eux-mêmes, en utilisant une technologie sophistiquée d'intelligence artificielle (I.A.). Les jambes auto-contrôlées pourraient un jour soutenir les mouvements des personnes âgées et des personnes handicapées physiques.
Le système, construit et testé par des chercheurs de l'Université de Waterloo, combine la vision par ordinateur et l'IA d'apprentissage en profondeur. pour imiter une démarche humaine. « Apprenant » à partir d'une collection d'échantillons de promenades dans un environnement, le système ajuste ses mouvements en fonction de l'environnement qu'il détecte.
"Nous donnons une vision aux exosquelettes robotiques afin qu'ils puissent se contrôler", a déclaré Brokoslaw Laschowski , candidat au doctorat en ingénierie de conception de systèmes qui dirige un projet de recherche de l'Université de Waterloo appelé ExoNet .
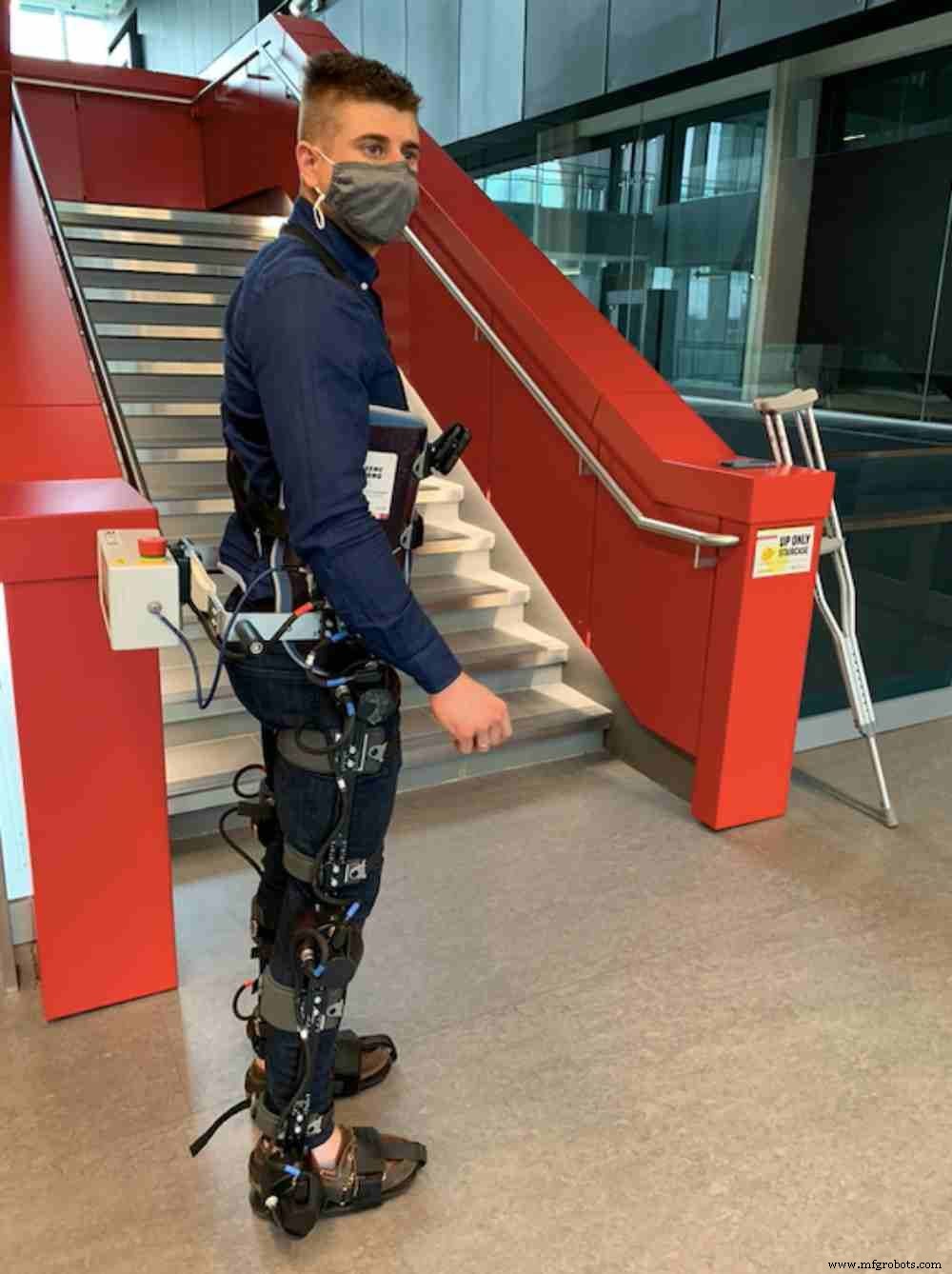
Le système ExoNet, soutenu par l'intelligence artificielle, extrait des données de formation recueillies par l'équipe. Avec des caméras portables attachées à leur poitrine (comme le montre l'image ci-dessus), Laschowski et ses collègues chercheurs ont pris des vidéos d'environnements intérieurs et extérieurs.
I.A. un logiciel informatique a ensuite traité le flux vidéo pour reconnaître avec précision les escaliers, les portes et d'autres éléments de l'environnement.
La réalisation a été détaillée dans la revue Frontiers in Robotics and AI . (Explorer un jeu de données de recherche concernant ce projet d'exosquelette autonome.)
Le dernier d'une série d'articles sur les projets connexes, Simulation of Stand-to-Sit Biomechanics for Robotic Exoskeletons and Prostheses with Energy Regeneration , apparaît dans la revue IEEE Transactions on Medical Robotics and Bionics.
Des jambes d'exosquelette motorisées ont déjà été conçues, mais le porteur a presque toujours eu besoin d'un joystick ou d'une application pour smartphone pour contrôler ses mouvements.
Plus de robots dans les fiches techniques
Un robot en cours de développement à l'université de Tel-Aviv "entend" des signaux électriques, grâce à un capteur naturel :l'oreille d'un criquet mort.
Un nouveau robot n'a pas besoin d'électronique pour se déplacer, juste une source constante d'air sous pression.
"Cela peut être gênant et exigeant sur le plan cognitif", a déclaré Laschowski. "Chaque fois que vous souhaitez effectuer une nouvelle activité locomotrice, vous devez vous arrêter, sortir votre smartphone et sélectionner le mode souhaité."
L'approche de l'Université de Waterloo offre un contrôle plus automatisé, grâce à l'I.A. et capacités de vision par ordinateur.
La prochaine phase du projet de recherche ExoNet consistera à envoyer des instructions aux moteurs afin que les exosquelettes robotiques puissent monter des escaliers, éviter des obstacles ou prendre d'autres mesures appropriées en fonction de l'analyse du mouvement actuel de l'utilisateur et du terrain à venir.
De plus, les chercheurs travaillent également à améliorer l'efficacité énergétique des moteurs des exosquelettes robotiques en utilisant le mouvement humain pour recharger automatiquement les batteries.
"Notre approche de contrôle ne nécessiterait pas nécessairement la pensée humaine", a déclaré Laschowski, qui est supervisé par le professeur d'ingénierie John McPhee , titulaire de la Chaire de recherche du Canada en dynamique des systèmes biomécatroniques, dans son groupe de recherche sur le mouvement laboratoire. "Semblable aux voitures autonomes qui se conduisent elles-mêmes, nous concevons des exosquelettes autonomes qui marchent tout seuls."
Dans une session de questions-réponses avec Tech Briefs ci-dessous, Brokoslaw Laschowski explique plus en détail la technologie ExoNet et explique pourquoi un exosquelette doté de caractéristiques similaires à une voiture autonome doit également inclure des mesures de sécurité similaires à celles d'un véhicule.
Fiches techniques : Comment assurez-vous la sécurité ? L'utilisateur peut-il prendre le contrôle si l'exosquelette fait par erreur quelque chose de dangereux ? L'analogie est ADAS vs véhicules complètement autonomes. Comment l'utilisateur contrôlerait-il la vitesse et les arrêts et départs ? Comment ces contrôles s'interfaceraient-ils avec l'utilisateur ?
Brokoslaw Laschowski :La sécurité est la plus haute importance. Ces dispositifs robotiques sont conçus pour aider les personnes âgées et les personnes handicapées physiques (par exemple, accident vasculaire cérébral, lésion de la moelle épinière, paralysie cérébrale, arthrose, etc.). Nous ne pouvons pas nous permettre que l'exosquelette prenne de mauvaises décisions et provoque potentiellement des chutes ou des blessures. Par conséquent, nous nous concentrons entièrement sur l'amélioration de la précision et du contrôle de la classification en développant un système de reconnaissance de l'environnement pour permettre à l'exosquelette de détecter et de réagir de manière autonome en temps réel à l'environnement de marche. Nous optimisons les performances du système à l'aide d'ordinateurs et de prototypes portables avec des contrôles "sains" avant les tests cliniques. Cependant, l'utilisateur de l'exosquelette aura toujours la possibilité de prendre le contrôle manuel (par exemple, l'arrêt et la direction).
Fiches techniques :Pouvez-vous me présenter une application que vous envisagez pour ce type d'exosquelette ? Où cela sera-t-il le plus précieux ?
Brokoslaw Laschowski :Ces dispositifs robotiques sont conçus pour aider les personnes âgées et les personnes handicapées physiques à effectuer des activités locomotrices. Un exemple d'application de notre système de contrôle automatisé adaptatif à l'environnement est la commutation entre différentes activités locomotrices. Dans les exosquelettes disponibles dans le commerce, lors de la transition de la marche au sol vers la montée des escaliers, par exemple, l'utilisateur s'approche de l'escalier, s'arrête et communique manuellement à l'exosquelette l'activité prévue à l'aide d'une interface mobile, de boutons-poussoirs ou d'autres commandes manuelles (selon l'appareil).
En revanche, avec un système de contrôle autonome, lorsque l'utilisateur s'approche d'un escalier incliné, des capteurs embarqués tels que des unités de mesure inertielle (IMU) détectent et classent en permanence les mouvements actuels de l'utilisateur, et le système de caméra portable détecte et classe le terrain à venir. La fusion de ces différentes technologies de capteurs et algorithmes de reconnaissance de formes est utilisée pour prédire l'intention locomotrice de l'utilisateur et contrôler l'exosquelette.
Fiches techniques :Comment l'exosquelette est-il "formé" pour fonctionner sans pensée humaine ?
Brokoslaw Laschowski :Nous utilisons la vision par ordinateur et l'apprentissage en profondeur pour la classification de l'environnement. À l'aide de millions d'images du monde réel, nos réseaux de neurones convolutifs sont entraînés automatiquement et efficacement pour prédire les différents environnements de marche présentés dans les images. Ces informations sur l'environnement de marche sont ensuite utilisées pour contrôler l'exosquelette robotique en termes de planification de trajectoire optimale, d'évitement d'obstacles et de commutation entre différentes activités locomotrices (par exemple, marcher sur un terrain plat pour monter des escaliers).
Fiches techniques :Quelle est la prochaine étape pour cet exosquelette ? Sur quoi travaillez-vous maintenant ?
Brokoslaw Laschowski :Du point de vue de la sécurité, ces systèmes de contrôle d'exosquelette alimentés par l'IA doivent fonctionner avec précision et en temps réel. Par conséquent, nous nous concentrons sur l'amélioration de la précision de la classification de l'environnement tout en utilisant des architectures de réseau de neurones avec des exigences minimales en matière de calcul et de stockage de mémoire pour favoriser l'inférence en temps réel intégrée.
Qu'en pensez-vous ? Partagez vos questions et commentaires.
Capteur
- Contrôlez votre production grâce à une planification efficace de la capacité
- Contrôle d'accès avec QR, RFID et vérification de la température
- Amélioration du contrôle qualité avec le cycle de Deming
- Meilleur contrôle qualité avec les pièces imprimées en 3D
- Comment contrôler les systèmes de transfert robotique avec des capteurs de distance laser
- Automatisation du contrôle qualité à l'aide de la technologie
- Tour avec CNC
- Tests de méthode de mesure Ajustement des exosquelettes
- Exosquelette robotique du haut du corps