


L'approche rend les agents sans personnel autonomes
Les chercheurs ont développé une approche qui permet à un véhicule aérien sans pilote (UAV) à voilure tournante d'atterrir sur un véhicule terrestre sans pilote (UGV) en mouvement sans l'aide du GPS et de se recharger avant de continuer. Des équipes d'agents aériens et terrestres autonomes permettront des opérations dans des environnements de recherche et de sauvetage qui sont trop éloignés ou dangereux pour les humains, mais qui nécessitent souvent une infrastructure de positionnement et de communication étendue.
Une fonction essentielle des drones est d'atterrir de manière autonome sur des véhicules terrestres statiques et mobiles, de se recharger, puis de décoller pour effectuer de nouvelles missions. Les drones ne pourront pas compter sur le GPS, car il est facilement perturbé, de sorte que ces comportements devront être effectués à l'aide d'autres sources telles que la vision embarquée.
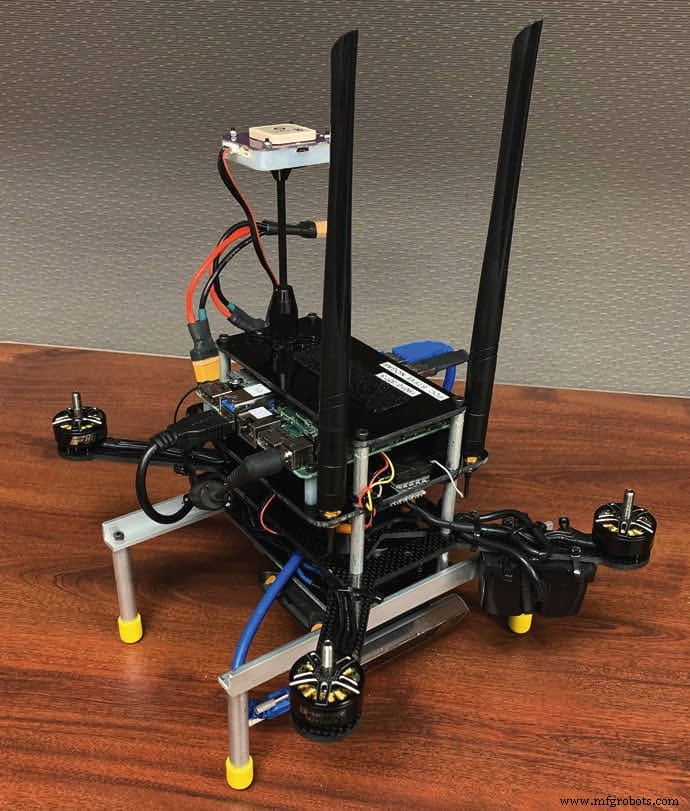
Les chercheurs ont effectué des calculs à bord du véhicule à l'aide de capteurs et d'ordinateurs à faible coût. De plus, aucune communication n'a eu lieu entre l'UAV et l'UGV. L'équipe a mené à la fois des simulations logicielles dans la boucle et des expériences en extérieur et a démontré que l'algorithme était efficace pour effectuer des manœuvres d'atterrissage. À l'aide d'un petit quadrotor construit sur mesure et d'un UGV à des vitesses de jogging, les chercheurs ont expérimenté des atterrissages.
Le travail combine des comportements interdits par le GPS et un comportement prouvé expérimentalement. Il utilise une localisation basée sur la vision avec une odométrie visuelle-inertielle, un marqueur unique au-dessus du véhicule terrestre conçu pour cette application, ainsi que des comportements et un contrôle à bord. De plus, ces comportements ont été effectués à bord d'un petit UAS avec des contraintes de calcul importantes.
Le marqueur personnalisé sur le dessus du véhicule au sol est spécialement conçu pour la tâche d'atterrissage. Il contient des marqueurs plus petits à l'intérieur du plus grand marqueur qui peuvent toujours être visualisés même lorsque la caméra s'approche du marqueur. L'approche pourrait réduire la dépendance vis-à-vis du marqueur de repère au-dessus du véhicule terrestre et le remplacer par une intelligence artificielle qui reconnaîtrait le véhicule sur lequel il souhaite atterrir.
Capteur
- Qu'est-ce qu'un alternateur ?
- Agents logiciels portables :une approche « Goldilock » de la connectivité IoT
- Qu'est-ce qu'un innovateur ?
- Détecteur rapide d'aérosols d'agents biologiques
- EV vs ICE :en quoi la conception des faisceaux de câbles diffère-t-elle ?
- L'adaptateur rend tous les écouteurs intelligents
- Véhicule aérien sans pilote (UAV) à haute altitude pour la surveillance des paramètres météorologiques
- Port de charge pour essaims de drones autonomes
- Le public est-il prêt pour un véhicule autonome de niveau 4 ?