


Essais de véhicules autonomes :simulation, circuit fermé et routes publiques
Avant qu'un véhicule autonome puisse prendre la route, il doit être testé pour autant de scénarios que possible.
- Les logiciels de simulation et les outils de développement basés sur des modèles peuvent créer des environnements de test virtuels.
- Les tests HIL, ou "hardware-in-the-loop", connectent les signaux réels d'un contrôleur à un système de test qui simule la réalité. Un contrôleur comme un calculateur de moteur, par exemple, peut, en effet, être amené à "penser" qu'il se trouve dans la voiture finie. Avec HIL, les fabricants sont alors en mesure de soumettre les composants du véhicule à une gamme de scénarios possibles, sans les coûts des lecteurs de mots réels.
- Et puis, bien sûr, il faut sortir la voiture pour un vrai tour, à la fois sur route ouverte et sur circuit fermé.
Dans un Tech Briefs en direct présentation intitulée Standardization for Automated-Vehicle Testing and Simulation, un lecteur avait la question suivante pour deux experts de l'industrie.
"Pour les tests AV, quel est le rôle respectif de la simulation, du circuit fermé et des tests sur la voie publique ? "
Lisez ci-dessous les réponses modifiées de Jamie Smith, directeur de la recherche et de la conception des transports chez le fabricant de tests automatisés National Instruments, et Jeffrey Wishart, ingénieur en chef de la société de conseil Exponent.
Jamie Smith, NI :Le plus grand changement a été d'adopter la simulation. Nous utilisons la simulation dans la conception des commandes depuis des années et nous nous sommes rendu compte que la seule façon de relever les défis auxquels l'industrie est confrontée est de combiner les tests HIL, les tests sur route et les tests de simulation. Cela a été un grand changement dans notre philosophie, ainsi que dans les domaines dans lesquels nous réalisons des investissements.
Une autre question de lecteur pour Jeff et Jamie
Un lecteur demande :"Le public est-il prêt pour un véhicule autonome de niveau 4 ?"
Jeffrey Wishart, exposant : Je pense que les pourcentages de Jamie concernant principalement la simulation, avec des circuits fermés et d'autres sur route, sont à peu près corrects, et vers où l'industrie semble se diriger.
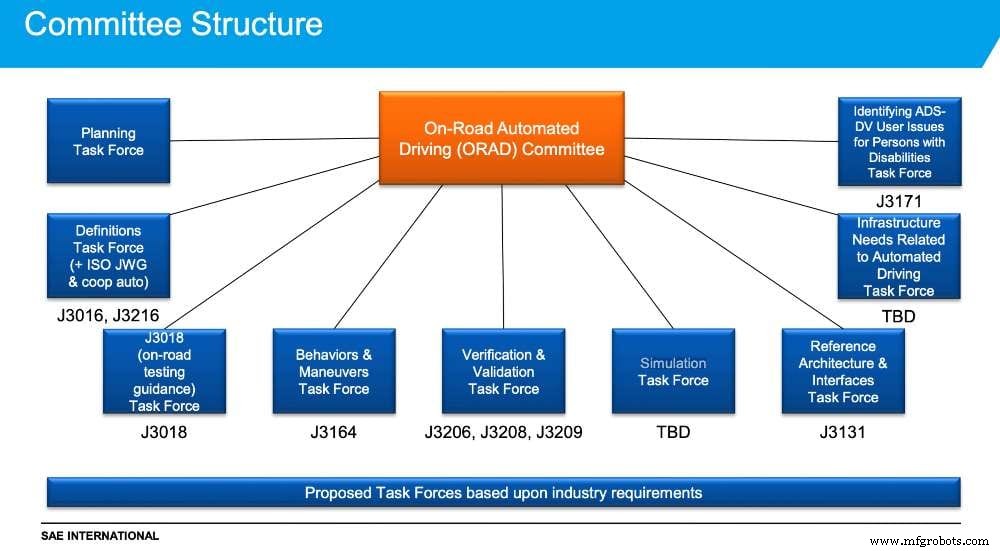
Je pense que la fidélité de la simulation est un élément clé, et nous devons comprendre à quel point la simulation est proche du monde réel, afin de comprendre sa valeur. Si vous faites un million de scénarios et de tests mais que la fidélité est faible, quelle en est la valeur ? SAE dispose d'un groupe de travail sur la conduite automatisée sur route (ORAD) qui travaille actuellement sur ce sujet.
Le cours fermé est vraiment précieux, car vous pouvez valider vos simulations, ou un sous-ensemble de vos tests de simulation. Mais c'est cher et cela prend beaucoup de temps.
Les essais sur route publique sont très utiles car vous obtiendrez des scénarios que vous n'avez peut-être jamais vus auparavant ou auxquels vous n'avez pas pensé, mais cela prend aussi beaucoup de temps et vous faites beaucoup de conduite qui n'est pas du tout utile. Cela peut sembler très ennuyeux la plupart du temps, avec seulement un petit pourcentage [de scénarios de conduite] intéressants. Et les tests sur la voie publique sont également très coûteux à réaliser.
Ils ont chacun leur rôle. Tout le monde fera les trois, mais il s'agit de comprendre les limites et les avantages de chacun.
Que pensez-vous des options d'essai des véhicules ? Partagez vos questions et commentaires ci-dessous.
Capteur
- Qu'est-ce qu'un alternateur ?
- Woven Capital de Toyota investit dans la plateforme de flotte de véhicules autonomes Ridecell
- La simulation informatique modélise avec précision des voitures en mouvement
- Tester des capteurs dans le brouillard pour rendre les futurs transports plus sûrs
- Un robot autonome ouvre des portes
- Logiciel de simulation de véhicule :comment tester le radar et le lidar dans la neige
- Outil de simulation du trafic aérien
- Système de suivi de mouvement 3D pour technologie autonome
- Le public est-il prêt pour un véhicule autonome de niveau 4 ?