


La conception de référence simplifie le contrôle de moteur robotique industriel
Une nouvelle conception de référence accélère le développement de l'outillage en bout de bras pour robotique industrielle utilisant un module de servocontrôleur/pilote à axe unique avec contrôle de mouvement intégré.
Trinamic, qui fait maintenant partie de Maxim Integrated, a présenté une gamme de solutions de contrôle de puissance à la pointe de l'APEC, y compris ses dernières solutions qui simplifient le développement de l'outillage en bout de bras (EoAT) pour la robotique industrielle et le servocontrôleur à axe unique/ pilote avec contrôle de mouvement intégré. Dans une interview avec Power Electronics, Jeff DeAngelis, vice-président des communications industrielles chez Maxim Integrated, ainsi que Jonas Proeger, directeur de la gestion commerciale, et Stephan Kubisch, directeur de la définition des produits, tous deux chez Trinamic, ont souligné ces dernières solutions qui accélèrent le temps de développement dans diverses applications d'automatisation industrielle.
La conception de référence open source TMCM-1617-GRIP-REF intègre un contrôleur matériel orienté sur le terrain (FOC) et trois ports de communication. Il comprend le circuit intégré de qualité industrielle MAX22000 de Maxim Integrated, l'émetteur-récepteur IO-Link MAX22515, une E/S analogique haute précision configurable par logiciel et le MAX14906, une E/S numérique à quatre canaux utilisée pour configurer le mode de fonctionnement de l'unique servomoteur d'axe.
Le nouveau module de servocontrôleur/pilote TMCM-1321 est destiné à optimiser les performances des moteurs pas à pas bipolaires biphasés en optimisant la vitesse et la synchronisation des axes et en réduisant les pertes de puissance. Maxim Integrated a souligné que l'appareil intègre un encodeur magnétique et des entrées numériques pour les encodeurs optiques afin de simplifier l'asservissement avec un retour d'information et des diagnostics avancés.
Plateforme Open Source
« L'avantage de la conception de référence TMCM-1617-GRIP-REF est sa capacité à intégrer plusieurs circuits sur une seule carte qui serait généralement distribuée sur plusieurs cartes ou composants à l'extrémité d'un bras robotique. Cette empreinte compacte combine une interface de bus de communication simplifiée qui réduit les charges de câblage et fournit un moyen rationalisé de déplacer à la fois les données et l'alimentation sur une seule ou deux paires de fils, ainsi que la possibilité de mettre l'outil en service correctement. Cette interface de bus de communication et de configuration de taille compacte et simplifiée est associée à notre environnement de développement logiciel TMCL-IDE, ce qui en fait une conception de référence très polyvalente pour l'outillage en bout de bras », a déclaré DeAngelis. Il a ajouté : « en plus de sa taille compacte, un autre facteur important obtenu est le poids très léger de 24 grammes pour ce module. »
Comme Proeger l'a décrit, le schéma fonctionnel de la figure 1 montre une cellule de charge pour détecter la force qui vient du bras ou de la pince, ou du capteur de proximité. TMCM-1617-GRIP-REF prend en charge les protocoles de communication industriels EtherCAT, IO-Link et RS-485, et fournit un signal analogique et des entrées/sorties numériques programmables par logiciel et peut être configuré à l'aide de l'environnement de développement intégré Trinamic Motion Control Language (TMCL- IDE). « Nous offrons l'option de communication RS-485 avec 100 mégabits par seconde, ce qui est toujours populaire. L'avantage est qu'il s'agit toujours d'un câblage haut débit traditionnel pour répondre aux exigences de cette application. C'est un produit très flexible du point de vue de la communication en tant qu'approche plus traditionnelle du contrôle du moteur », a déclaré Proeger.
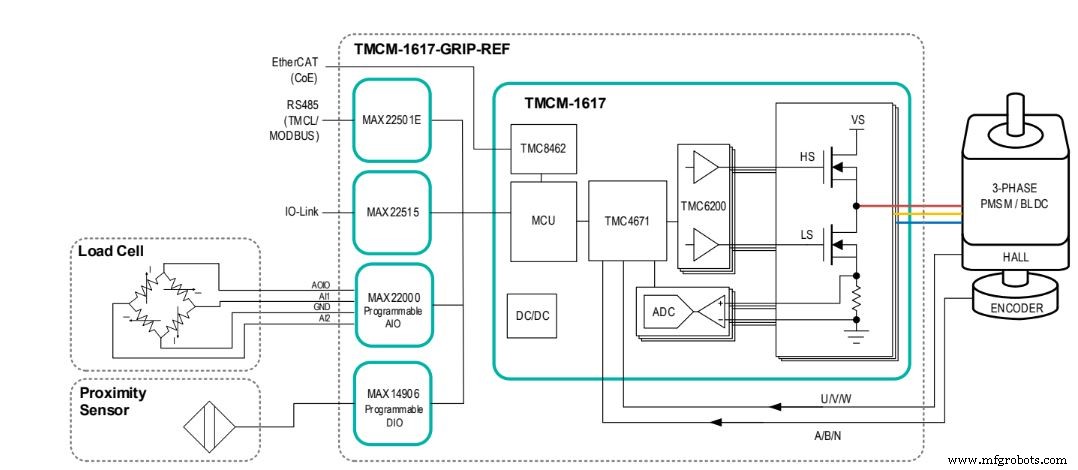
Figure 1 : Schéma fonctionnel de TMCM-1617-GRIP-REF (Source :Maxim Integrated)
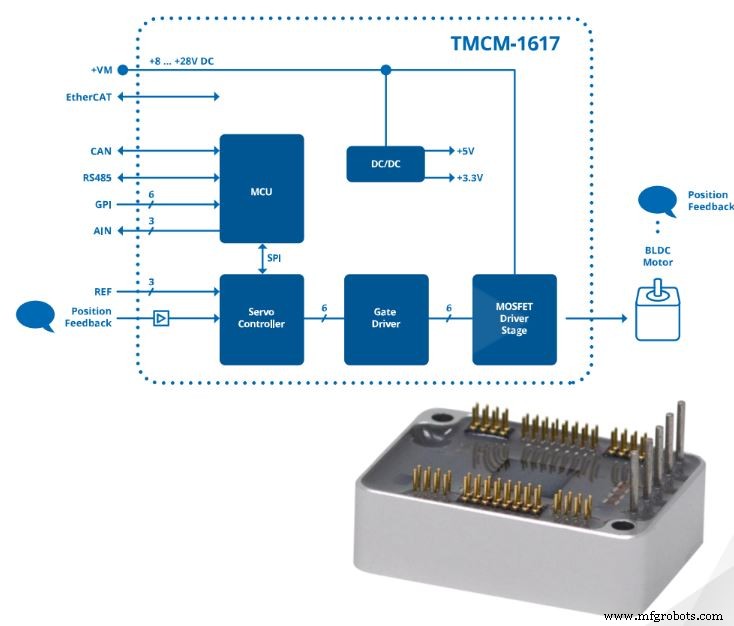
Figure 2 :TMCM-1617 – Le plus petit servocontrôleur (Source :Maxim Integrated)
« Nous fournissons tous les rails d'alimentation nécessaires pour prendre en charge les périphériques externes et les capteurs sans nécessiter de source d'alimentation supplémentaire », a déclaré Kubisch. Il a ajouté :« un contrôle parfait du courant a le plus grand impact sur l'efficacité globale du système. »
Avec des architectures de bus à la pointe de la technologie, combinées à un contrôle et à des diagnostics intégrés dans une solution unique, Maxim Integrated pense que la conception de référence peut augmenter la productivité dans l'usine et amener l'intelligence artificielle à la périphérie. Par exemple, les fonctionnalités embarquées du MAX22515 telles qu'une protection intégrée étendue pour assurer une communication robuste dans les environnements industriels difficiles. Toutes les broches de l'interface de ligne IO-Link (V24, C/Q, DI et GND) sont protégées contre les tensions inverses, les courts-circuits, les connexions à chaud et disposent d'une protection intégrée contre les surtensions de ± 1,2 kV/ 500 Ω.
Pour l'avenir de la commande de moteur et de mouvement, la complexité croissante liée à la demande de fiabilité ultime conduira à plus d'intelligence du système - et cela doit être à la périphérie, décentralisé. Les décisions doivent être prises en temps réel, les données doivent être collectées à la source et partagées dans le cloud.
Servocontrôleur/pilote TMCM-1321
Le TMCM-1321 est un contrôleur/pilote à axe unique pour moteurs pas à pas bipolaires biphasés avec un encodeur magnétique intégré et des entrées numériques, tous offrant une logique de contrôle en boucle fermée pour optimiser le contrôle du moteur.
Maxim Integrated a souligné que le facteur de forme est censé être nettement plus petit que les autres solutions et que la carte prend en charge le micropas 256x avec un fonctionnement sans bruit. L'encodeur magnétique intégré peut être utilisé lorsqu'un aimant approprié est fixé à l'axe du moteur, permettant un fonctionnement en boucle fermée. Alternativement, un encodeur optique peut être connecté via les entrées numériques ABN. Différentes formes de rampe peuvent être sélectionnées. En plus de la rampe linéaire et de la rampe Trinamic SixPoint™, le module TMCM-1321 met en œuvre une rampe en forme de S qui peut accélérer le temps de transfert réel.
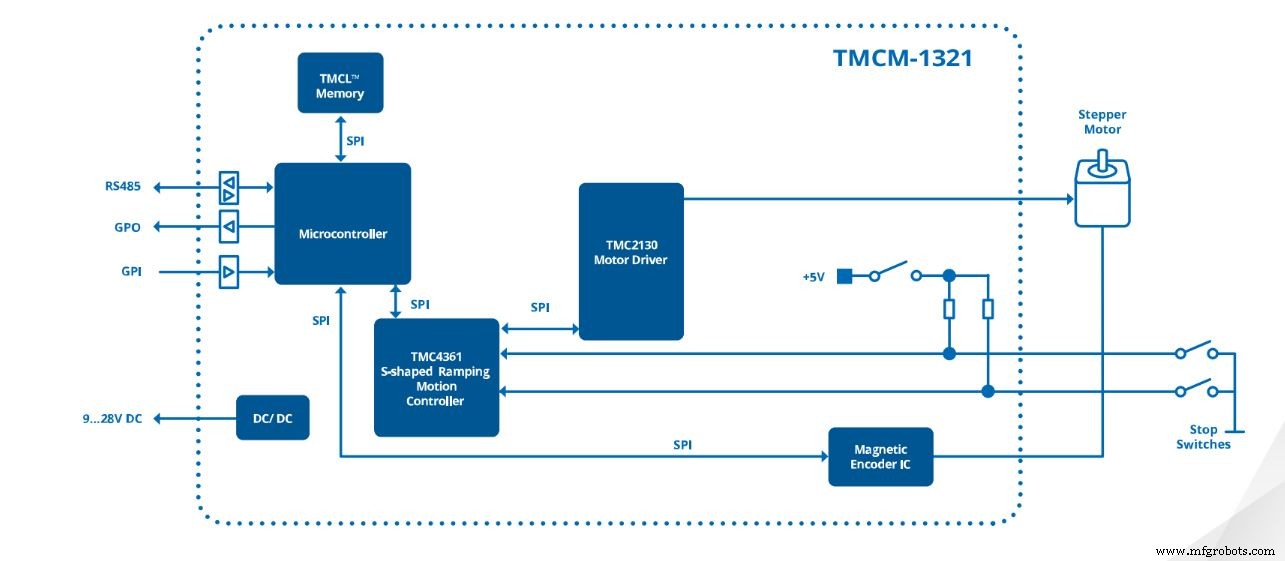
Figure 3 : Schéma fonctionnel du TMCM-1321 (Source :Maxim Integrated)

Figure 4 :Carte TMCM-1321 (Source :Maxim Integrated)
Le TMCM-1321 a été conçu pour des courants de bobine jusqu'à 0,7 A RMS et une tension d'alimentation de 24 V CC. Trois entrées numériques peuvent être utilisées comme entrées de commutateur de fin de course et de commutateur d'origine ou comme entrées à usage général.
La commande de moteur et les entraînements sont fondamentaux dans de nombreuses applications, car ils permettent d'obtenir un degré élevé de précision, ce qui se traduit à son tour par des coûts inférieurs et une plus grande efficacité. La fonction vitale remplie par un circuit de commande de moteur est de s'assurer que le rotor prend, dans différentes conditions de fonctionnement et de charge, une position précise concernant les enroulements, pour déterminer son emplacement avec un degré de précision suffisant.
>> Cet article a été initialement publié sur notre site frère, Power Nouvelles de l'électronique.
Contenus associés :
- Conception de commandes de moteurs pour systèmes robotiques
- Créer des robots avec Ada, 2e partie – Conduire les moteurs
- Résoudre les défis de conception déterministe de la commande de moteur multi-axes
- Le logiciel facilite la conception du pilote de moteur BLDC
- Les kits de développement offrent des plates-formes pour les conceptions de commande de moteur à alimentation numérique
- Conception d'un système de rétroaction à réaction rapide pour les conceptions miniaturisées entraînées par moteur
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
Embarqué
- Renesas étend les options de microcontrôleur pour la servocommande dans les robots industriels
- Le module frontal simplifie la conception du WI-Fi 6
- Conception de commandes de moteurs pour systèmes robotiques
- Le contrôleur de moteur intègre le noyau Arm Cortex-M0
- Les pilotes intégrés facilitent la conception des moteurs pas à pas
- Avantages de la convergence du contrôle industriel
- Comprendre les panneaux de contrôle industriels
- Principes de base de la conception du panneau de commande
- Qu'est-ce que le prototypage de design industriel ?