


nRF24L01 - Comment ça marche, Interface Arduino, Circuits, Codes
Dans ce tutoriel, nous allons apprendre à établir une communication sans fil entre deux cartes Arduino en utilisant le nRF24L01 modules émetteurs-récepteurs. Le module nRF24L01 est un choix très populaire pour la communication sans fil lors de l'utilisation d'Arduino.
J'ai déjà utilisé ce module pour de nombreux projets Arduino et vous pouvez en découvrir quelques-uns ici :
Vous pouvez regarder la vidéo suivante ou lire le tutoriel écrit ci-dessous. Il comprend tout ce que nous devons savoir sur le module émetteur-récepteur nRF24L01, comme le brochage du module, le principe de fonctionnement, le câblage et plusieurs exemples de code.
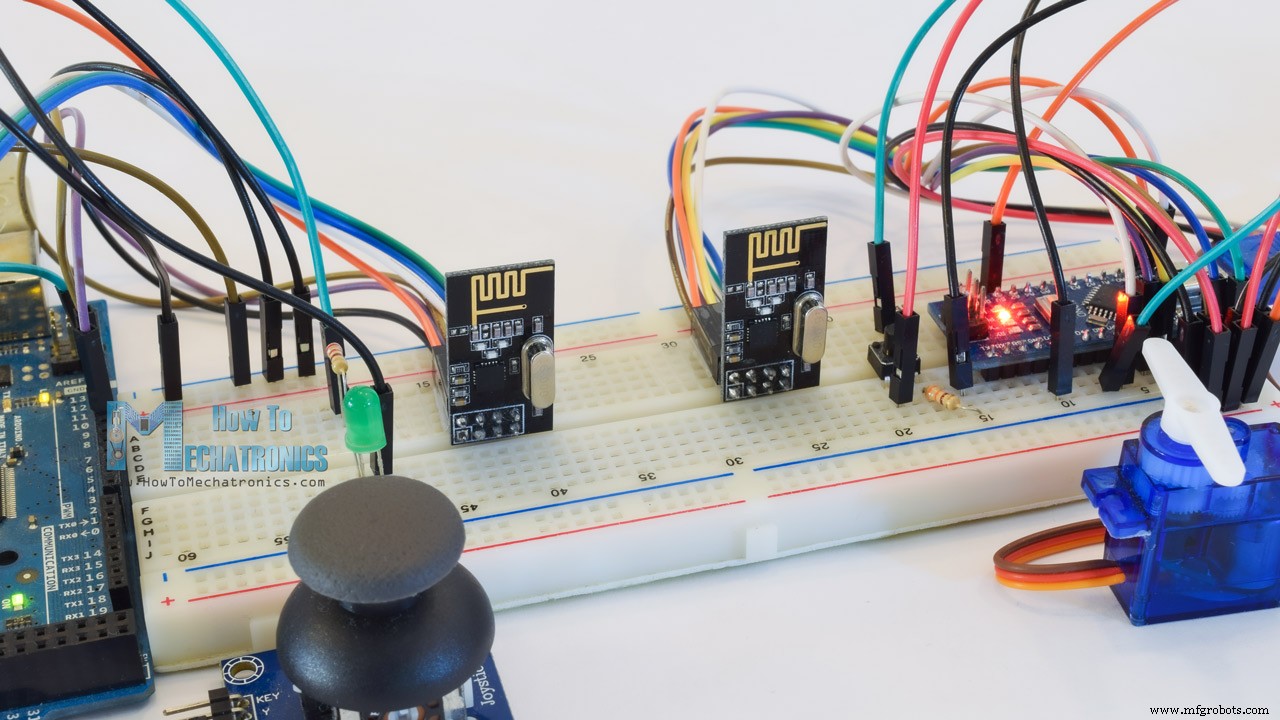
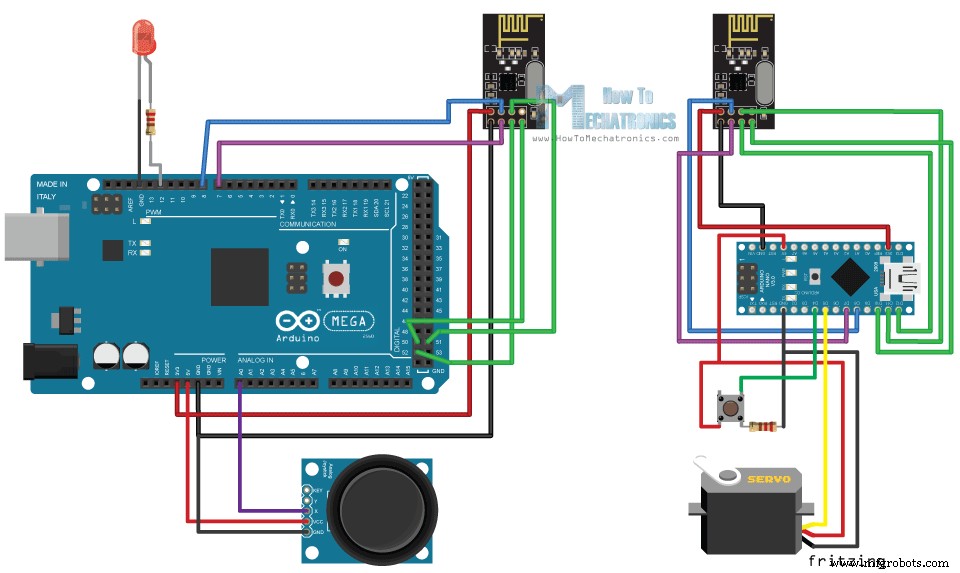
Pour expliquer la communication sans fil, nous ferons deux exemples, le premier enverra un simple message "Hello World" d'un Arduino à un autre, et dans le deuxième exemple, nous aurons une communication bidirectionnelle entre les cartes Arduino, où l'utilisation le Joystick sur le premier Arduino, nous contrôlerons le servomoteur sur le deuxième Arduino, et vice versa, en utilisant le bouton poussoir sur le deuxième Arduino, nous contrôlerons la LED sur le premier Arduino.
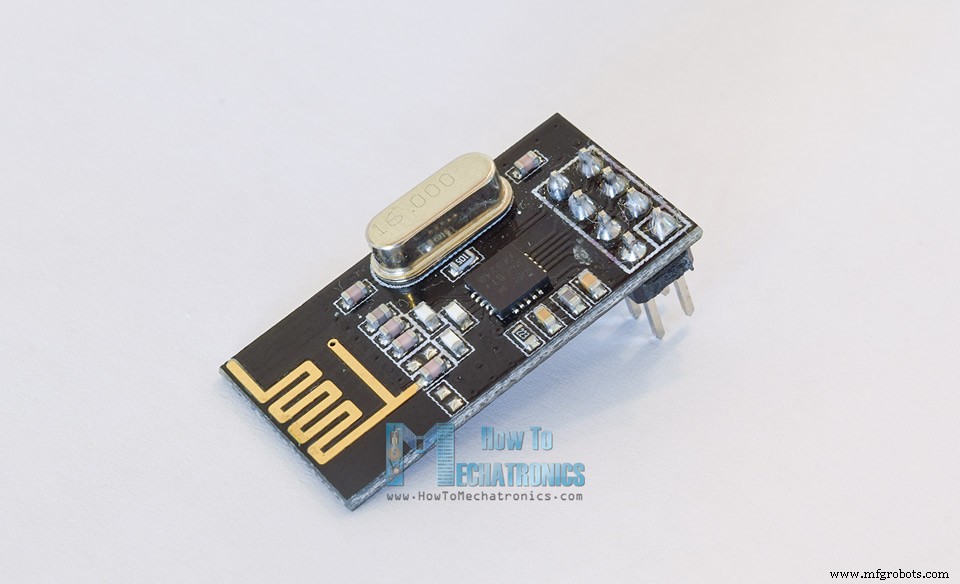
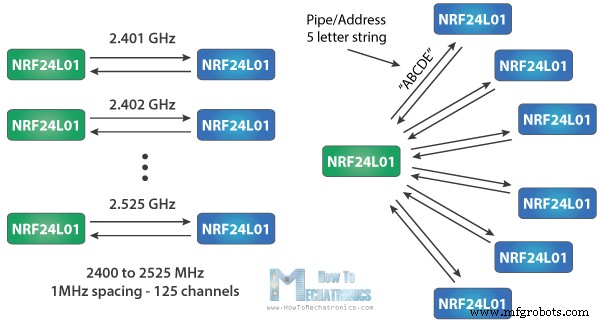
Examinons de plus près le module émetteur-récepteur NRF24L01. Il utilise la bande 2,4 GHz et peut fonctionner avec des débits en bauds allant de 250 kbps à 2 Mbps. S'il est utilisé dans un espace ouvert et avec un débit en bauds inférieur, sa portée peut atteindre jusqu'à 100 mètres.
Voici les spécifications complètes :
Le module peut utiliser 125 canaux différents, ce qui donne la possibilité d'avoir un réseau de 125 modems fonctionnant indépendamment en un seul endroit. Chaque canal peut avoir jusqu'à 6 adresses, ou chaque unité peut communiquer avec jusqu'à 6 autres unités en même temps.
La consommation électrique de ce module est d'environ 12 mA pendant la transmission, ce qui est encore plus faible qu'une seule LED. La tension de fonctionnement du module est de 1,9 à 3,6 V, mais la bonne chose est que les autres broches tolèrent la logique 5 V, nous pouvons donc facilement le connecter à un Arduino sans utiliser de convertisseurs de niveau logique.
Trois de ces broches sont destinées à la communication SPI et doivent être connectées aux broches SPI de l'Arduino, mais notez que chaque carte Arduino a des broches SPI différentes. Les broches CSN et CE peuvent être connectées à n'importe quelle broche numérique de la carte Arduino et elles sont utilisées pour mettre le module en mode veille ou actif, ainsi que pour basculer entre le mode émission ou commande. La dernière broche est une broche d'interruption qui n'a pas besoin d'être utilisée.
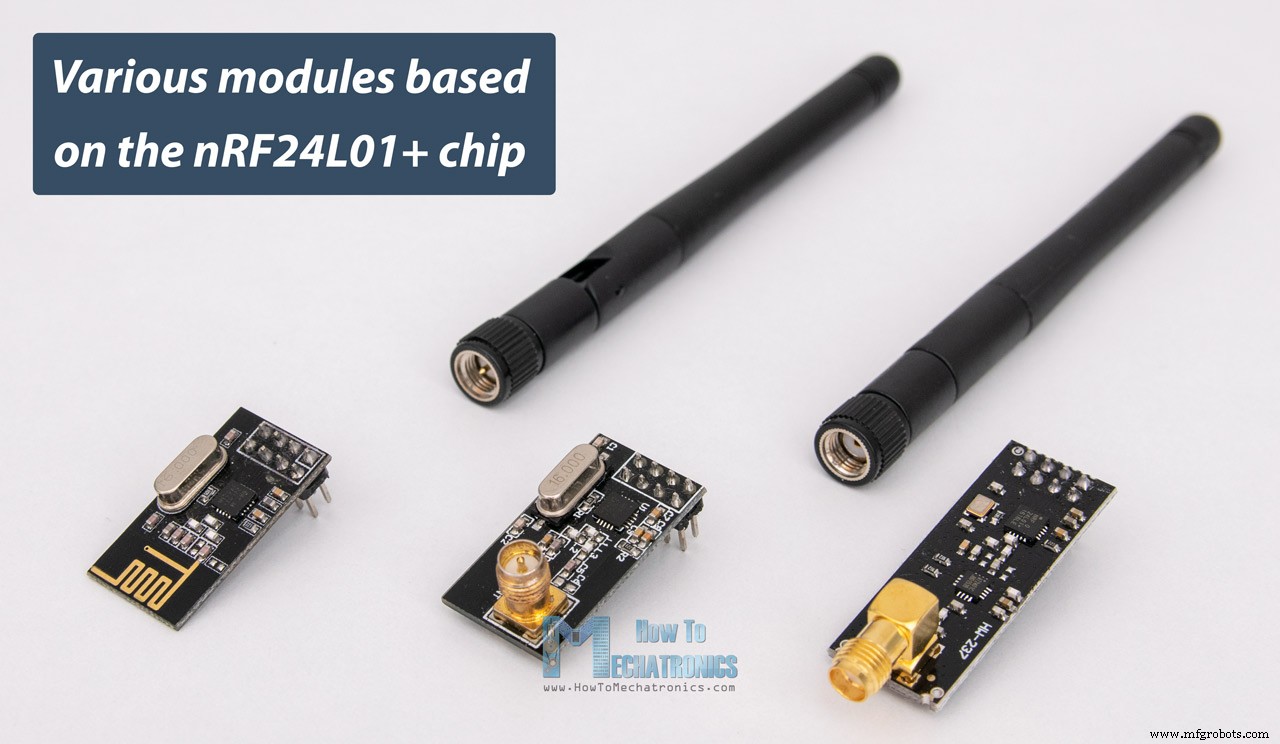
Il existe plusieurs variantes des modules NRF24L01. Le plus populaire est celui avec antenne embarquée. Cela rend le module plus compact, mais d'autre part, réduit la portée de transmission à une distance d'environ 100 mètres.
La deuxième variante, au lieu d'antenne embarquée, dispose d'un connecteur SMA et auquel nous pouvons attacher une antenne canard pour une meilleure portée de transmission.
La troisième variante illustrée ici, en plus de l'antenne canard, possède une puce RFX2401C qui inclut PA (amplificateur de puissance) et LNA (amplificateur à faible bruit). Cela amplifie le signal NRF24L01 et permet une portée de transmission encore meilleure jusqu'à 1000 mètres en espace ouvert.
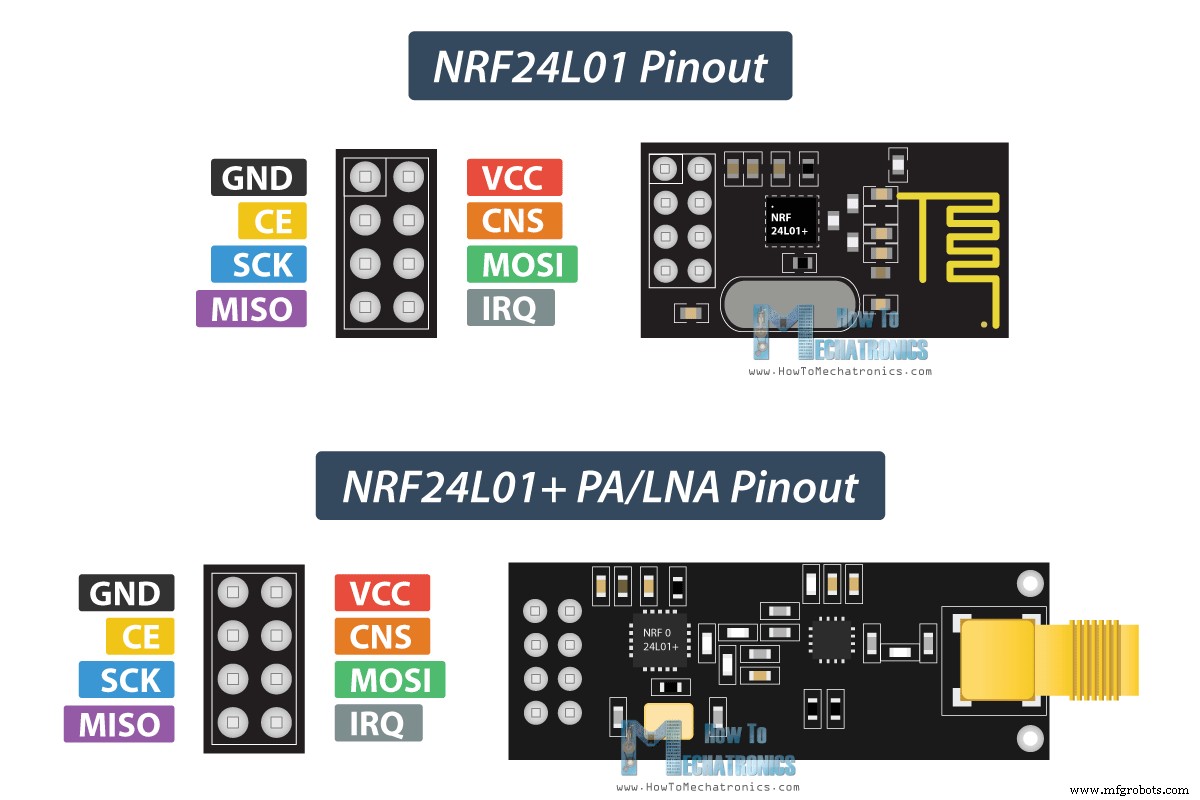
Voici un aperçu détaillé du brochage NRF24L01, ainsi que du module NRF24L01+ PA/LNA.
Les deux modules, le NRF24L01 et le NRF24L01+ PA/LNA ont le même brochage, nous pouvons donc les connecter dans notre circuit de la même manière.
Voici comment nous devons connecter les modules NRF24L01 aux cartes Arduino.
Comme je l'ai déjà mentionné, chaque carte Arduino a des broches SPI différentes, alors gardez cela à l'esprit lorsque vous connectez les modules à votre carte Arduino.
Vous pouvez obtenir les composants nécessaires pour ce didacticiel Arduino à partir des liens ci-dessous :
Une fois que nous avons connecté les modules NRF24L01 aux cartes Arduino, nous sommes prêts à créer les codes pour l'émetteur et le récepteur.
Nous devons d'abord télécharger et installer la bibliothèque RF24, ce qui rend la programmation moins difficile. Nous pouvons également installer cette bibliothèque directement à partir du gestionnaire de bibliothèque Arduino IDE. Recherchez simplement "rf24" et trouvez et installez celui par "TMRh20, Avamander".
Voici les deux codes pour la communication sans fil et ci-dessous en est la description.
Nous devons donc inclure le SPI de base et les bibliothèques RF24 nouvellement installées et créer un objet RF24. Les deux arguments ici sont les broches CSN et CE.
Ensuite, nous devons créer un tableau d'octets qui représentera l'adresse, ou le soi-disant tube par lequel les deux modules communiqueront.
Nous pouvons changer la valeur de cette adresse en n'importe quelle chaîne de 5 lettres et cela permet de choisir à quel récepteur nous parlerons, donc dans notre cas nous aurons la même adresse à la fois au récepteur et à l'émetteur.
Dans la section de configuration, nous devons initialiser l'objet radio et, à l'aide de la fonction radio.openWritingPipe(), nous définissons l'adresse du récepteur auquel nous enverrons des données, la chaîne de 5 lettres que nous avons précédemment définie.
De l'autre côté, au niveau du récepteur, en utilisant la fonction radio.setReadingPipe(), nous définissons la même adresse et nous activons ainsi la communication entre les deux modules.
Ensuite, en utilisant la fonction radio.setPALevel(), nous définissons le niveau de l'amplificateur de puissance. Dans notre cas, je le définirai au minimum car mes modules sont très proches les uns des autres.
Notez que si vous utilisez un niveau supérieur, il est recommandé d'utiliser des condensateurs de dérivation entre GND et 3,3 V des modules afin qu'ils aient une tension plus stable pendant le fonctionnement.
Ensuite, nous avons la fonction radio.stopListening() qui définit le module comme émetteur, et de l'autre côté, nous avons la fonction radio.startListening() qui définit le module comme récepteur.
Dans la section boucle, au niveau de l'émetteur, nous créons un tableau de caractères auquel nous attribuons le message "Hello World". En utilisant la fonction radio.write() nous enverrons ce message au récepteur. Le premier argument ici est la variable que nous voulons envoyer.
En utilisant le "&" avant le nom de la variable, nous définissons en fait une indication de la variable qui stocke les données que nous voulons envoyer et en utilisant le deuxième argument, nous définissons le nombre d'octets que nous voulons prendre de cette variable. Dans ce cas, la fonction sizeof() récupère tous les octets des chaînes "text". À la fin du programme, nous ajouterons 1 seconde de retard.
En utilisant la fonction radio.write() nous pouvons envoyer un maximum de 32 octets à la fois.
De l'autre côté, au niveau du récepteur, dans la section boucle utilisant la fonction radio.available() nous vérifions s'il y a des données à recevoir. Si c'est vrai, nous créons d'abord un tableau de 32 éléments, appelé "texte", dans lequel nous enregistrerons les données entrantes.
En utilisant la fonction radion.read(), nous lisons et stockons les données dans la variable « text ». À la fin, nous imprimons simplement du texte sur le moniteur série. Ainsi, une fois que nous avons téléchargé les deux programmes, nous pouvons exécuter le moniteur série sur le récepteur et nous remarquerons que le message "Hello World" est imprimé chaque seconde.
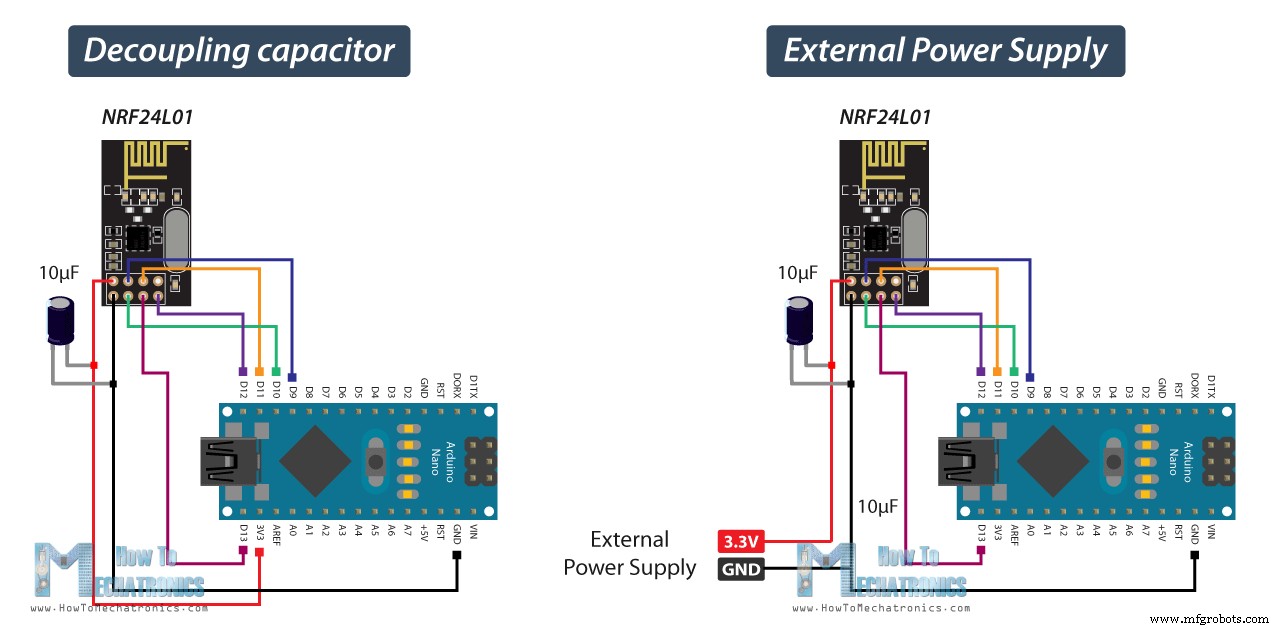
Il convient de noter que le bruit de l'alimentation est l'un des problèmes les plus courants rencontrés par les utilisateurs lorsqu'ils tentent d'établir une communication réussie avec les modules NRF24L01. Généralement, les circuits RF ou les signaux radiofréquence sont sensibles au bruit de l'alimentation. Par conséquent, c'est toujours une bonne idée d'inclure un condensateur de découplage sur la ligne d'alimentation. Le condensateur peut être n'importe quoi de 10uF à 100uF.
Un autre problème courant est que la broche 3,3 V des cartes Arduino ne peut pas toujours fournir suffisamment d'énergie au module NRF24L01. Donc, alimenter le module avec une source d'alimentation externe est également une bonne idée.
Voyons le deuxième exemple, une communication sans fil bidirectionnelle entre deux cartes Arduino. Voici les schémas du circuit :
Vous pouvez obtenir les composants nécessaires pour cet exemple à partir des liens ci-dessous :
Voici les deux codes et leur description ci-dessous.
Code émetteur
Code du destinataire
Ce qui est différent ici de l'exemple précédent, c'est que nous devons créer deux canaux ou adresses pour la communication bidirectionnelle.
Dans la section de configuration, nous devons définir les deux canaux et noter que l'adresse d'écriture sur le premier Arduino doit être l'adresse de lecture sur le deuxième Arduino, et vice versa, l'adresse de lecture sur le premier Arduino doit être l'adresse d'écriture sur le deuxième Arduino.
Dans la section boucle en utilisant la fonction radio.stopListening(), nous définissons le premier Arduino comme émetteur, lisons et mappons la valeur de Joystick de 0 à 180, et en utilisant la fonction radio.write() envoyons les données au récepteur.
De l'autre côté, en utilisant la fonction radio.startListening(), nous définissons le deuxième Arduino comme récepteur et nous vérifions s'il y a des données disponibles. Tant qu'il y a des données disponibles, nous les lirons, les enregistrerons dans la variable "angleV", puis utiliserons cette valeur pour faire tourner le servomoteur.
Ensuite, au niveau de l'émetteur, nous définissons le premier Arduino comme récepteur et avec une boucle "while" vide, nous attendons que le deuxième Arduino envoie les données, et ce sont les données pour l'état du bouton-poussoir, qu'il soit enfoncé ou non. Si le bouton est enfoncé, la LED s'allume. Ainsi, ces processus se répètent constamment et les deux cartes Arduino envoient et reçoivent constamment des données.
Examinons un autre exemple de code utilisant les modules NRF24L01. Tout reste le même que dans les exemples précédents, sauf pour la façon dont nous structurons et envoyons la date.
Code émetteur
Ainsi, nous pouvons créer une structure qui est en fait une collection de différents types de variables.
Nous devons garder à l'esprit que la taille maximale de ces données de structure peut être de 32 octets. Ici, nous pouvons voir que j'ai inclus trois variables de type octet, une variable entière (4 octets), une variable flottante (4 octets) et une chaîne contenant quatre caractères (4 octets). C'est un total de 15 octets.
Code du destinataire
Côté récepteur, nous devons définir les mêmes données de structure afin de pouvoir recevoir les données entrantes. Pour tester si la communication sans fil fonctionne correctement, j'ai imprimé chaque variable sur le moniteur série.
Le module NRF24L01 est une excellente option lorsque vous avez besoin d'une communication sans fil pour votre projet Arduino. J'ai déjà utilisé ce module dans plusieurs de mes projets Arduino.
Ici, je vais lister tous mes projets dans lesquels j'ai utilisé ces modules.
Chacun de ces projets/tutoriels contient une explication détaillée de l'utilisation du module NRF24L01, y compris des schémas de circuit, une implémentation de code améliorée pour une meilleure communication, etc.
Mon projet préféré est cet émetteur RC Arduino conçu sur mesure. Il s'agit en fait d'un contrôleur RC à 14 canaux qui peut être utilisé pour contrôler à peu près n'importe quel projet Arduino.
C'est tout pour ce tutoriel, j'espère que vous l'avez apprécié et appris quelque chose de nouveau. Comme toujours, n'hésitez pas à poser des questions dans la section des commentaires ci-dessous.
Aperçu
Module émetteur-récepteur nRF24L01
Plage de fréquences Bande ISM 2,4 – 2,5 GHz Débits de données 250Kbps / 1Mbps / 2Mbps Max. puissance de sortie 0dBm Tension de fonctionnement 1.9 – 3.6V Max. courant de fonctionnement 12,3 mA Courant de veille 22µA Entrées logiques tolérant 5 V Portée de communication 100 m (espace ouvert) Comment ça marche

Variantes de modules
Broche du module nRF24L01
Comment connecter le nRF24L01 à Arduino
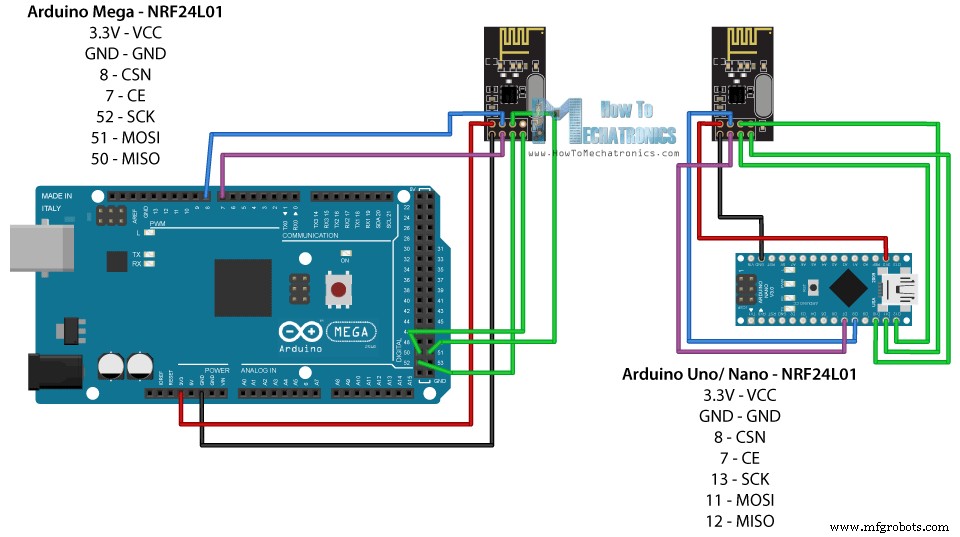
Arduino SCK MISO MOSI SS Uno 13 12 11 10 Nano 13 12 11 10 Méga 52 50 51 53
Code Arduino et nRF24L01
Code émetteur
/*
* Arduino Wireless Communication Tutorial
* Example 1 - Transmitter Code
*
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
* Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8); // CE, CSN
const byte address[6] = "00001";
void setup() {
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MIN);
radio.stopListening();
}
void loop() {
const char text[] = "Hello World";
radio.write(&text, sizeof(text));
delay(1000);
}Code language: Arduino (arduino)Code du destinataire
/*
* Arduino Wireless Communication Tutorial
* Example 1 - Receiver Code
*
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
* Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8); // CE, CSN
const byte address[6] = "00001";
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
radio.startListening();
}
void loop() {
if (radio.available()) {
char text[32] = "";
radio.read(&text, sizeof(text));
Serial.println(text);
}
}Code language: Arduino (arduino)Description du code
RF24 radio(7, 8); // CE, CSNCode language: Arduino (arduino)const byte address[6] = "00001";Code language: Arduino (arduino)radio.openWritingPipe(address);Code language: Arduino (arduino)radio.openReadingPipe(0, address);Code language: Arduino (arduino)radio.setPALevel(RF24_PA_MIN);Code language: Arduino (arduino)// at the Transmitter
radio.stopListening();Code language: Arduino (arduino)// at the Receiver
radio.startListening();Code language: Arduino (arduino)void loop() {
const char text[] = "Hello World";
radio.write(&text, sizeof(text));
delay(1000);
}Code language: Arduino (arduino)void loop() {
if (radio.available()) {
char text[32] = "";
radio.read(&text, sizeof(text));
Serial.println(text);
}
}Code language: Arduino (arduino)Dépannage
Communication sans fil bidirectionnelle avec deux NRF24L01 et Arduino
Code source nRF24L01
/*
* Arduino Wireless Communication Tutorial
* Example 2 - Transmitter Code
*
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
* Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#define led 12
RF24 radio(7, 8); // CE, CSN
const byte addresses[][6] = {"00001", "00002"};
boolean buttonState = 0;
void setup() {
pinMode(12, OUTPUT);
radio.begin();
radio.openWritingPipe(addresses[1]); // 00002
radio.openReadingPipe(1, addresses[0]); // 00001
radio.setPALevel(RF24_PA_MIN);
}
void loop() {
delay(5);
radio.stopListening();
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
radio.write(&angleValue, sizeof(angleValue));
delay(5);
radio.startListening();
while (!radio.available());
radio.read(&buttonState, sizeof(buttonState));
if (buttonState == HIGH) {
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}Code language: Arduino (arduino)/*
* Arduino Wireless Communication Tutorial
* Example 2 - Receiver Code
*
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
* Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
#define button 4
RF24 radio(7, 8); // CE, CSN
const byte addresses[][6] = {"00001", "00002"};
Servo myServo;
boolean buttonState = 0;
void setup() {
pinMode(button, INPUT);
myServo.attach(5);
radio.begin();
radio.openWritingPipe(addresses[0]); // 00001
radio.openReadingPipe(1, addresses[1]); // 00002
radio.setPALevel(RF24_PA_MIN);
}
void loop() {
delay(5);
radio.startListening();
if ( radio.available()) {
while (radio.available()) {
int angleV = 0;
radio.read(&angleV, sizeof(angleV));
myServo.write(angleV);
}
delay(5);
radio.stopListening();
buttonState = digitalRead(button);
radio.write(&buttonState, sizeof(buttonState));
}
}Code language: Arduino (arduino)const byte addresses[][6] = {"00001", "00002"};Code language: Arduino (arduino)// at the Transmitter
radio.openWritingPipe(addresses[1]); // 00001
radio.openReadingPipe(1, addresses[0]); // 00002Code language: Arduino (arduino)// at the Receiver
radio.openWritingPipe(addresses[0]); // 00002
radio.openReadingPipe(1, addresses[1]); // 00001Code language: Arduino (arduino)radio.stopListening();
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
radio.write(&angleValue, sizeof(angleValue));Code language: Arduino (arduino)radio.startListening();
if ( radio.available()) {
while (radio.available()) {
int angleV = 0;
radio.read(&angleV, sizeof(angleV));
myServo.write(angleV);
}Code language: Arduino (arduino)Exemple 3 - Envoi de plusieurs variables dans un seul package
/*
Arduino Wireless Communication Tutorial
Example 1 - Transmitter Code
by Dejan Nedelkovski, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8); // CE, CSN
const byte address[6] = "00001";
// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte a = 0;
byte b = 125;
byte c = 255;
int d = 1024;
float e = 3.141592;
String f = "Test";
};
Data_Package data; // Create a variable with the above structure
void setup() {
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MIN);
radio.stopListening();
}
void loop() {
// Send the whole data from the structure to the receiver
radio.write(&data, sizeof(Data_Package));
delay(500);
}Code language: Arduino (arduino)// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte a = 0;
byte b = 125;
byte c = 255;
int d = 1024;
float e = 3.141592;
String f = "Test";
};
Data_Package data; // Create a variable with the above structureCode language: Arduino (arduino)/*
Arduino Wireless Communication Tutorial
Example 1 - Receiver Code
by Dejan Nedelkovski, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8); // CE, CSN
const byte address[6] = "00001";
// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte a = 0;
byte b = 125;
byte c = 255;
int d = 1024;
float e = 3.141592;
String f = "Test";
};
Data_Package data; //Create a variable with the above structure
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
radio.startListening();
}
void loop() {
// Check whether there is data to be received
if (radio.available()) {
radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure
}
Serial.print("a: ");
Serial.print(data.a);
Serial.print(" b: ");
Serial.print(data.b);
Serial.print(" c: ");
Serial.print(data.c);
Serial.print(" d: ");
Serial.print(data.d);
Serial.print(" e: ");
Serial.print(data.e);
Serial.print(" f: ");
Serial.println(data.f);
}Code language: Arduino (arduino)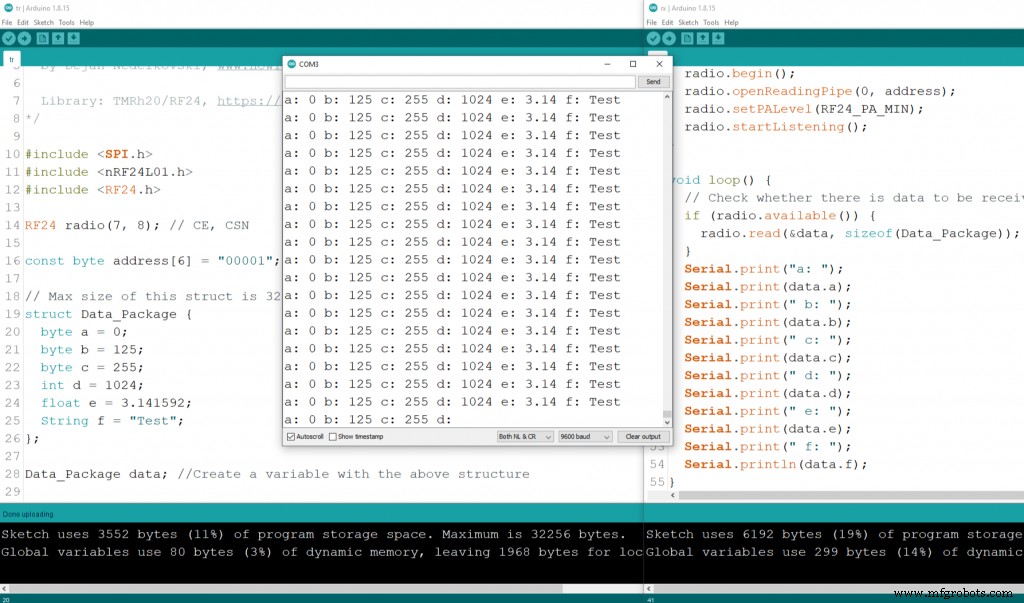
Conclusion

Processus de fabrication
- Comment mesurer la qualité de l'air sur OpenSensors
- Comment pirater des télécommandes infrarouges
- Comment mesurez-vous ?
- Générateur d'ondes JX
- Planche à roulettes en réalité virtuelle DIY
- Comment interfacer Arduino Mega avec le module GPS NEO-6M
- Est-il facile d'utiliser une thermistance ? !
- Comment faire de la musique avec un Arduino
- Voici une idée :comment fonctionne une interface cerveau-ordinateur