


Contrôle Web dynamique Arduino
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
À propos de ce projet
Présentation
Si vous êtes débutant, je vous recommande de lire sur Arduino - Servo Motor et Arduino - Wifi.
Pour connecter Arduino à Internet, nous devons utiliser une sorte de bouclier Internet tel qu'un bouclier Ethernet, un bouclier Wifi, un bouclier PHPoC ou un bouclier PHPoC Wifi.
La caractéristique exceptionnelle de PHPoC shield est qu'il fournit non seulement une connexion Internet comme Ethernet et Wifi shield, mais fournit également un serveur Web qui permet de contrôler et de surveiller Arduino à partir d'un navigateur Web. Il prend également en charge WebSocket, nous pouvons donc contrôler et surveiller Arduino en temps réel sans recharger une page Web.
PHPoC Shield a quelques applications Web intégrées. Référez-vous à ce lien pour plus de détails.
Dans ce projet, j'ai modifié l'UI (User Interface) de Web Remote Control/Slide application Web et a écrit le code Arduino pour faire pivoter l'angle du servomoteur en fonction de l'angle reçu du navigateur Web.
Câblage
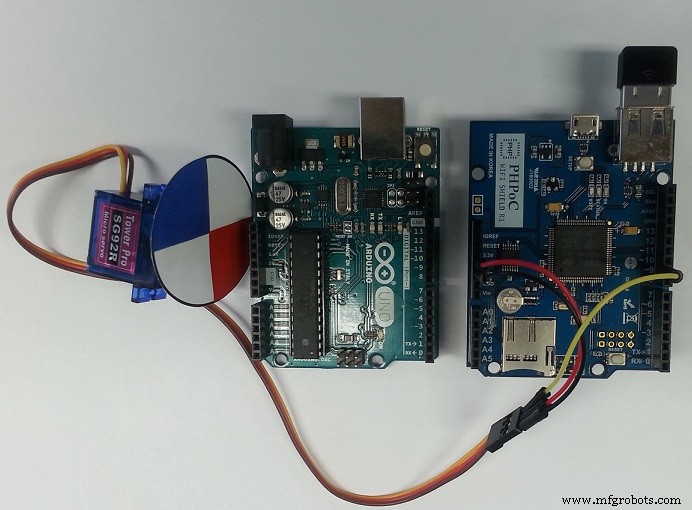
- Empiler le shield PHPoC sur Arduino
- Connectez la broche GND, VCC et le signal du servomoteur à GND, 5V et la broche 9 d'Arduino, respectivement.
Flux de données
Navigateur Web ---> PHPoC Shield ---> Arduino
L'application Web calculera l'angle en fonction de l'événement tactile ou de la souris, l'enverra au bouclier PHPoC via Websocket. Lors de la réception de ces données, le bouclier PHPoC les transmet à Arduino. Arduino fait tourner le servomoteur en fonction de l'angle.
Ce que nous devons faire
- Définir les informations Wifi pour le bouclier PHPoC (SSID et mot de passe)
- Télécharger la nouvelle interface utilisateur vers le bouclier PHPoC
- Écrire le code Arduino
Configuration des informations Wifi pour PHPoC Shield
Voir cette instruction :http://www.phpoc.com/support/manual/p4s-347_user_manual/contents.php?id=network_first_setup
Télécharger une nouvelle interface utilisateur vers PHPoC Shield
- Télécharger le code source PHPoC remote_rotate.php (dans la section code)
- Téléchargez-le sur PHPoC shield à l'aide du débogueur PHPoC conformément à cette instruction
Écrire le code Arduino
- Installez la bibliothèque pour Arduino sur Arduino IDE (voir les instructions) et redémarrez Arduino IDE.
- Sur Arduino IDE, accédez à Fichier -> Exemples -> Phpoc -> WebRemoteSlide et Fichier -> Exemples ->Servo->balayage.
- Combinez deux exemples en un seul, nous avons le code pour contrôler le servomoteur via la page Web (voir le code source dans la section code).
Tests
- Cliquez sur le bouton série sur Arduino IDE pour voir l'adresse IP
- Ouvrez le navigateur Web, saisissez http://replace_ip_address /remote_rotate.php
- Cliquez sur le bouton de connexion et testez-le
Le meilleur kit de démarrage Arduino pour débutant
Si vous recherchez un kit Arduino, consultez Le meilleur kit Arduino pour les débutants
Références de fonction
- Arduino - Bibliothèque Servo
- Servo.attach()
- Servo.write()
- Servo.writeMicroseconds()
- Servo.read()
- Servo.attaché()
- Servo.detach()
- Serial.begin()
- Série.println()
- retard()
- boucle for
- boucle while
- si autre
- boucle()
- configuration()
- String.toInt()
Code
- remote_rotate.php
- Code Arduino
remote_rotate.phpPHP
PHPoC Shield - Télécommande Web pour Arduino
Télécommande Web / Rotation
WebSocket :null
Angle :0
Code ArduinoArduino
/* serveur Web arduino - télécommande (interrupteur à glissière) */#include "SPI.h"#include "Phpoc.h"#includePhpocServer server (80);Servo myservo; // crée un objet servo pour contrôler un servochar slideName;int slideValue;void setup() { Serial.begin(9600); while(!Série); Phpoc.begin(PF_LOG_SPI | PF_LOG_NET); //Phpoc.begin(); server.beginWebSocket("remote_slide"); Serial.print("Adresse du serveur WebSocket :"); Serial.println(Phpoc.localIP()); monservo.attach(9) ; // attache le servo sur la broche 9 à l'objet servo myservo.write(1); }void loop() { // attend un nouveau client :PhpocClient client =server.available(); if (client) { String slideStr =client.readLine(); if(slideStr) { slideValue =slideStr.substring(1).toInt(); monservo.write(slideValue); Serial.print("Angle :"); Serial.println(slideValue); } }}
Processus de fabrication
- Contrôleur DMX Web
- Arduino Spybot
- Contrôler l'accepteur de pièces avec Arduino
- Contrôler les appareils électroménagers via le Web ou le mobile
- Centre de contrôle Arduino
- Arduino avec Bluetooth pour contrôler une LED !
- Contrôle de l'humidificateur Arduino
- Arduino Nano :contrôler 2 moteurs pas à pas avec joystick
- Arduino - Envoyer la température au Web via série