


AR DRONE et 1SHEELD - Découvrez le monde autour de votre drone
Composants et fournitures
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 |
À propos de ce projet
Notre projet voit le contrôle de diverses données de vol enregistrées par un smartphone et transmises en temps réel à votre ordinateur, comme le capteur d'accéléromètre, la position GPS, le drone de bruit, l'orientation, le gyroscope et plus encore.
Nous utilisons deux Arduino pour le contrôle des données, un monté sur le drone et un sur l'ordinateur, deux xBee pour communiquer les données à distance du 1sheeld à votre PC.
Une façon amusante et facile de profiter de toutes les fonctionnalités et capteurs du smartphone, et aussi de prendre de belles photos;)
Code
- Code maître
- Esclave
Code maîtreC/C++
Ce code est chargé sur arduino qui se connecte au PC, pour contrôler l'arduino sur dronevous devez d'abord télécharger la bibliothèque https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
#includeint verifica=0;AltSoftSerial xBee;char c;char h;char stop='s ';void setup() { Serial.begin(115200); Serial.println("Master OK"); Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.begin(9600);}boucle vide() { Serial.flush(); if (Serial.available()>0) { c =Serial.read(); if(c=='o'||c=='a'||c=='m'||c=='g'||c=='b'||c=='p'){ //----------Orientation--------------------------------------- ---- if(c=='o'){ Serial.println("Orientation"); c='1'; xBee.print(c); for(int i=0; i<10;i++){ delay(20); c='o'; xBee.print(c); faire{ h=0; h=xBee.read(); Serial.print(h); } while(xBee.available()>0) ; retard (100); i=i-1 ; if(Serial.available()>0) ; if(stop==Serial.read()){ Serial.println("Analyse arrêtée"); c='0'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); i=11 ; } } } //----------Accélération---------------------------------- ------- if(c=='a'){ Serial.println("Accélération"); c='2'; xBee.print(c); for(int i=0; i<10;i++){ delay(20); c='a'; xBee.print(c); faire{ h=0; h=xBee.read(); Serial.print(h); } while(xBee.available()>0) ; retard (100); i=i-1 ; if(Serial.available()>0) ; if(stop==Serial.read()){ Serial.println("Analyse arrêtée"); c='0'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); i=11 ; } } } //----------Luminosité---------------------------------- ------ if(c=='b'){ Serial.println("Luminosité"); c='3'; xBee.print(c); for(int i=0; i<10;i++){ delay(20); c='b'; xBee.print(c); faire{ h=0; h=xBee.read(); Serial.print(h); } while(xBee.available()>0) ; retard (50); i=i-1 ; if(Serial.available()>0) ; if(stop==Serial.read()){ Serial.println("Analyse arrêtée"); c='0'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); i=11 ; } } } //----------GPS---------------------------------- ------- if(c=='g'){ Serial.println("Posizione GPS'"); c='4'; xBee.print(c); for(int i=0; i<10;i++){ delay(20); c='g'; xBee.print(c); faire{ h=0; h=xBee.read(); Serial.print(h); } while(xBee.available()>0) ; retard (500); i=i-1 ; if(Serial.available()>0) ; if(stop==Serial.read()){ Serial.println("Analyse arrêtée"); c='0'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); i=11 ; } } } //----------MICROFONO---------------------------------- ------- if(c=='m'){ Serial.println("Microphone"); c='5'; xBee.print(c); for(int i=0; i<10;i++){ delay(20); c='m'; xBee.print(c); faire{ h=0; h=xBee.read(); Serial.print(h); } while(xBee.available()>0) ; retard (100); i=i-1 ; if(Serial.available()>0) ; if(stop==Serial.read()){ Serial.println("Analyse arrêtée"); c='0'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); i=11 ; } } } //----------DES PHOTOS---------------------------------- ------- if(c=='p'){ Serial.println("Prendre des photos"); c='6'; xBee.print(c); retard(20); c='p'; Serial.println(); Serial.println("Chiffre pour :"); Serial.println(""o" valeur du capteur d'orientation"); Serial.println("'une' valeur du capteur d'accélération"); Serial.println("'b' valeur du capteur de luminosité"); Serial.println("'g' position GPS"); Serial.println("'m' bruit de micro"); Serial.println("'p' prend une photo"); xBee.print(c); } } }}
Esclave C/C++
Ce code est chargé sull'arduino qui se monte sur le drone, qui fournira les données au drone au solvous devez d'abord télécharger la bibliothèque https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
et http://1sheeld.com/downloads/
#include#include char variabile;AltSoftSerial xBee;char master;int voce=0;void setup(){ Serial.begin (115200); Serial.println("Esclave ok"); OneSheeld.begin(); xBee.begin(9600);}boucle vide(){recevoirEvent(); requestEvent();}void receiveEvent(){ while(xBee.available()>0){ master=xBee.read(); variable=maître; }}void requestEvent(){ if(variabile=='o'){ xBee.print("Asse x:"); xBee.print(OrientationSensor.getX()); xBee.print(" Asse y :"); xBee.print(OrientationSensor.getY()); xBee.print(" Asse z:"); xBee.println(OrientationSensor.getZ()); variable=0 ; } if(variabile=='a'){ xBee.print("Asse x:"); xBee.print(AccelerometerSensor.getX()); xBee.print(" Asse y :"); xBee.print(AccelerometerSensor.getX()); xBee.print(" Asse z:"); xBee.println(AccelerometerSensor.getX()); variable=0 ; } if(variabile=='g'){ xBee.print("Longitudine :"); xBee.print(GPS.getLongitude()); xBee.print(" Latitudine;:"); xBee.println(GPS.getLatitude()); variable=0 ; } if(variabile=='m'){ xBee.print("db:"); xBee.println(Mic.getValue()); variable=0 ; } if(variabile=='b'){ xBee.print("Lumen:"); xBee.println(LightSensor.getValue()); variable=0 ; } if(variabile=='p'){ Camera.setFlash(ON); Camera.rearCapture(); xBee.println("Photos prises"); variable=0 ; } if(variabile=='1'){ TextToSpeech.say("orientation de l'analyse"); variable=0 ; } if(variabile=='2'){ TextToSpeech.say("accélération de l'analyse "); variable=0 ; } if(variabile=='3'){ TextToSpeech.say("intensité de la luminosité de l'analyse"); variable=0 ; } if(variabile=='4'){ TextToSpeech.say("analyse position GPS"); variable=0 ; } if(variabile=='5'){ TextToSpeech.say("analyse du bruit en décibels"); variable=0 ; } if(variabile=='6'){ TextToSpeech.say("Prendre une photo"); variable=0 ; } if(variabile=='0'){ TextToSpeech.say("analyse arrêtée"); variable=0 ; }}
Schémas
C'est la connexion entre Arduino et xbee, idem pour l'Arduino qui se connecte à l'ordinateur et l'Arduino sur drone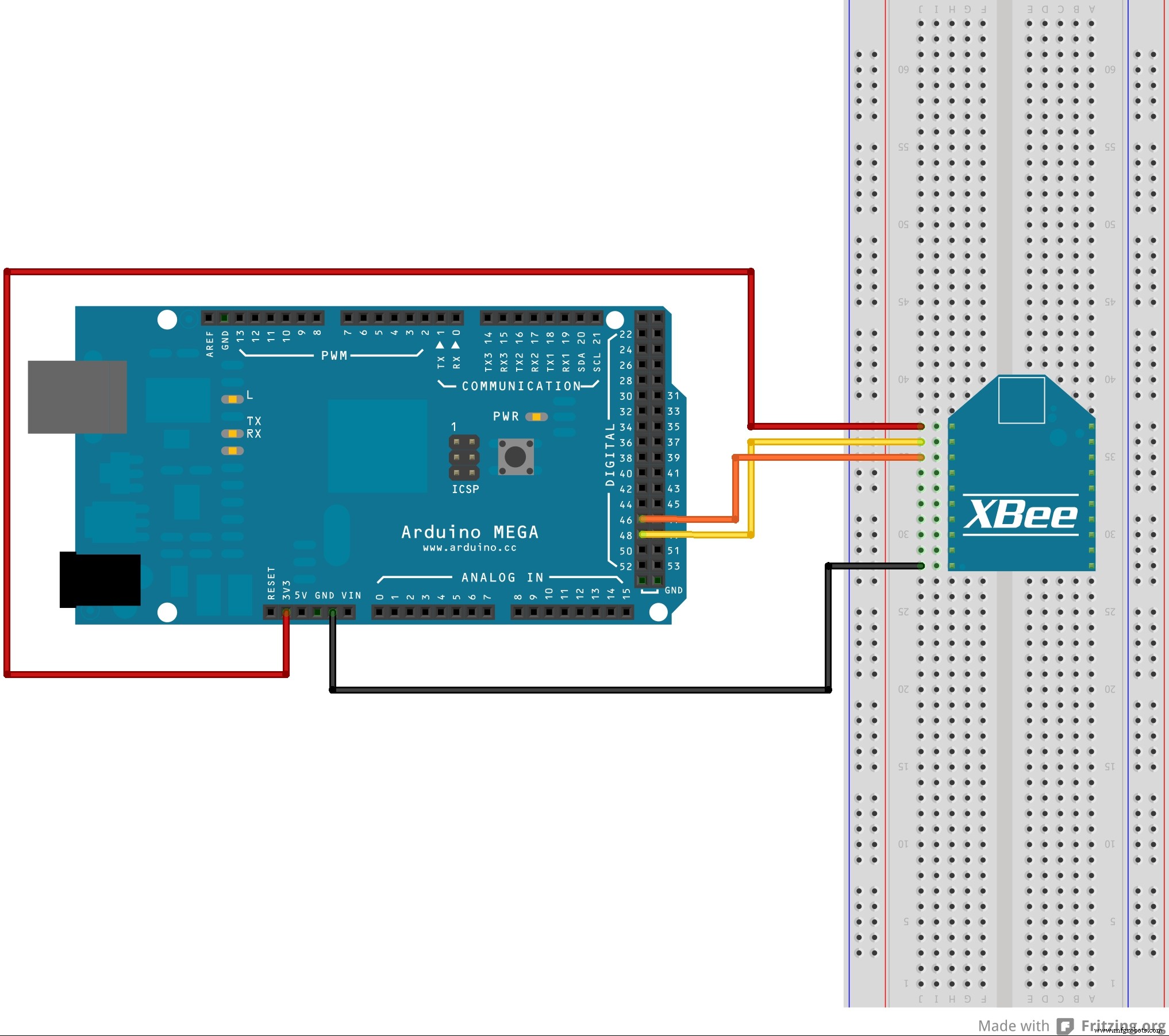
Processus de fabrication
- Le cloud et comment il change le monde informatique
- Contrôles de la réalité subis par l'industrie de la teinture dans le monde
- Le Drone Pi
- Votre smartphone et la voiture connectée
- 6 façons dont l'IA et l'IoT transforment votre monde des affaires en 2019
- The Edge and IoT :Insights from IoT World 2019
- L'IA peut désormais détecter et cartographier les implantations informelles dans le monde
- Au service du monde des composites en Israël et aux États-Unis
- Les avantages et les inconvénients du revêtement de votre pompe