


Arduino Trash-Bot (ouverture/fermeture automatique de la corbeille)
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
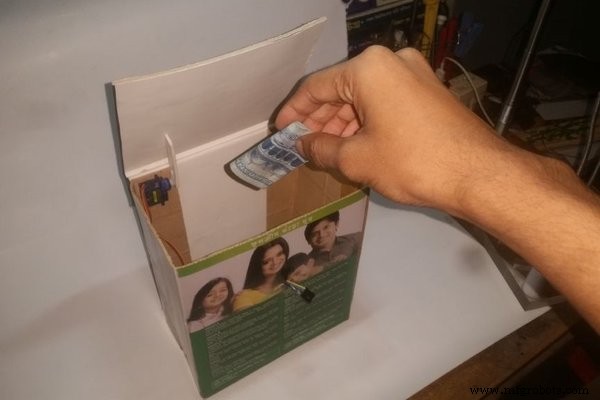
Tout devient plus intelligent, n'est-ce pas ? Alors pourquoi pas votre poubelle ? Cette poubelle s'ouvre et ferme son couvercle si elle voit des déchets devant elle. Vous n'avez qu'à y apporter les déchets et il s'ouvrira automatiquement et attendra que vous le nourrissiez plus qu'après un certain délai, il se fermera automatiquement. Regardez la vidéo pour voir exactement ce qu'il peut faire.
Commençons.
Étape 1 : Composants



(2 autres images)
- Arduino Uno (n'importe quelle carte)
- Servomoteur (j'utilise un micro servo sg90)
- Capteur à ultrasons HCSR04
- Bras de servo (à côté du servo sur la photo 2)
- Carton (il suffit de trancher le morceau)
- Corbeille
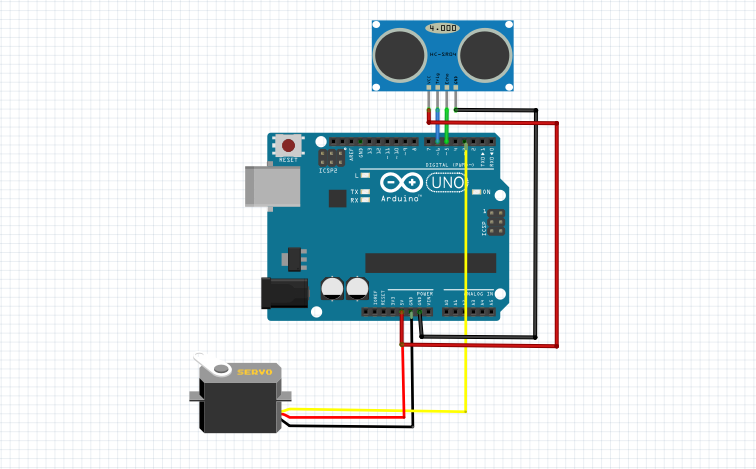
Étape 2 : Construisez le circuit
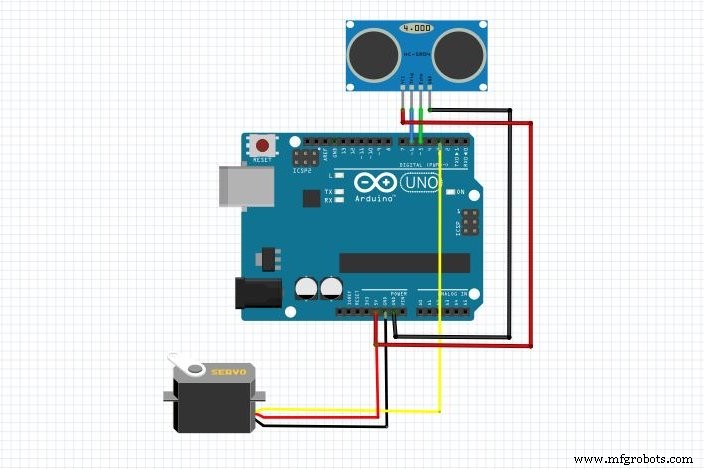
Le circuit est si facile. Comme le servo et le sonar ne consomment que moins d'énergie, vous pouvez simplement les alimenter directement à partir de la source Arduino 5v. N'oubliez pas d'alimenter l'Arduino avec plus de 7,4 V CC ou au moins 7 V.
- Données du servo (jaune) vers la broche 3 de l'arduino
- Servo vcc (rouge) à 5v d'Arduino
- Masse servo (noir/gris) vers Arduino Gnd
- Déclenchement du capteur sonar vers Arduino 6
- Echo du capteur sonar vers Arduino 5
- Vcc vers Arduino 5v
- Gnd vers Arduino Gnd
Étape 3 :Connectez le bras servo



Prenez simplement ce bras servo et connectez-le à un long morceau de carton avec de la colle chaude ou d'autres colles. Vous pouvez également utiliser un bâtonnet de crème glacée à la place du carton. Ensuite, connectez le long bras de servo au servomoteur.
Étape 4 : ajouter le capteur servo et sonar à la corbeille



Connectez le capteur sonar face au bac comme ceci. Et puis ajoutez le servomoteur comme celui-ci sur les photos 2 et 3, afin que le servo puisse tourner vers le haut.
Étape 5 :Le code
Lien de code :https://github.com/ashraf-minhaj/Trash-bot
J'ai programmé l'Arduino de sorte que s'il voit des déchets (littéralement n'importe quoi) dans une plage de 50 cm, le servo passe à 50 degrés et frappe le couvercle supérieur de la poubelle, de sorte que le couvercle supérieur soit ouvert, attend trois secondes, puis tourne automatiquement à 160 degrés et ainsi le couvercle supérieur se ferme. Alors maintenant, vous voyez une poubelle à ouverture/fermeture automatique.
#includeServo servo;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); servo.attach(3);}boucle vide(){ int durée, distance;digitalWrite(trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW);// Mesurer l'entrée d'impulsion en écho pinduration =pulseIn(echoPin, HIGH);// La distance est la moitié de la durée divisée par 29,1 (à partir de la fiche technique)distance =(durée/2) / 29.1;// si la distance est inférieure à 0,5 mètre et supérieure à 0 (0 ou moins signifie dépassement de la plage) if (distance <=50 &&distance>=0) { servo.write(50); delay(3000);} else { servo.write(160);}
Étape 6 :Vous avez terminé

Alors maintenant, alimentez simplement l'Arduino avec plus de 7v et vous avez un robot poubelle.
Merci.
[Si vous aimez mon travail, merci de me soutenir en vous abonnant à ma chaîne YouTube]
Code
- code du robot poubelle arduino
code arduino trash-botC/C++
#includeServo servo;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); servo.attach(3);}boucle vide(){ int durée, distance;digitalWrite(trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW);// Mesurer l'entrée d'impulsion en écho pinduration =pulseIn(echoPin, HIGH);// La distance est la moitié de la durée divisée par 29,1 (à partir de la fiche technique)distance =(durée/2) / 29.1;// si la distance est inférieure à 0,5 mètre et supérieure à 0 (0 ou moins signifie dépassement de la plage) if (distance <=50 &&distance>=0) { servo.write(50); delay(3000);} else { servo.write(160);}// Attendre 60 ms ne fera pas de mal à undelay(60);}
Schémas
code du robot poubelle arduino
https://github.com/ashraf-minhaj/Trash-botProcessus de fabrication