


Créer un robot de combat contrôlé avec une manette PS2
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Outils et machines nécessaires
| ||||
|
Applications et services en ligne
 |
|
À propos de ce projet
Nous avons créé des robots de combat en utilisant l'Arduino UNO et d'autres pièces abordables. Ces robots de combat ont été fabriqués dans un club de robotique pour les élèves de la 5e à la 8e année à la Trivium Personalized Learning Public Charter School. C'était une façon amusante pour les enfants d'en apprendre davantage sur l'Arduino et la robotique.
Voir "SCHÉMAS" pour voir des diagrammes visuels sur la façon dont tout est câblé. Il existe des schémas pour la carte du moteur, le blindage du capteur, le contrôleur PS2 et également un moteur supplémentaire connecté à une planche à pain pour un flipper / spinner. Le flipper/spinner est programmé pour s'activer lorsque vous appuyez sur le bouton X de la manette PS2.
Nous avons essayé d'utiliser des fournitures abordables et avons donné aux enfants une liberté créative sur la façon de concevoir leurs robots de combat. Nous avons utilisé des pièces qui ne nécessitaient pas de soudure, ce qui facilite l'assemblage pour les débutants.
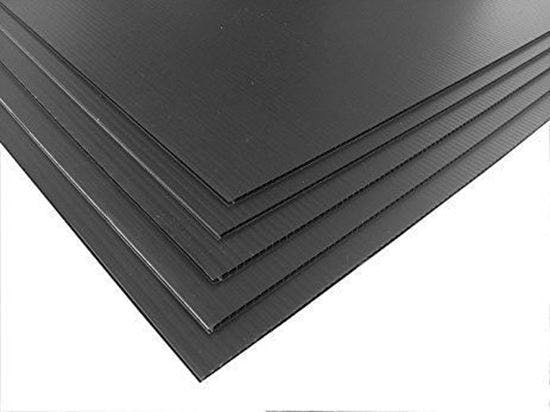
Coroplaste
Coroplast a été utilisé pour construire les corps. Il est abordable, plus solide que le carton et assez facile à couper et à plier.
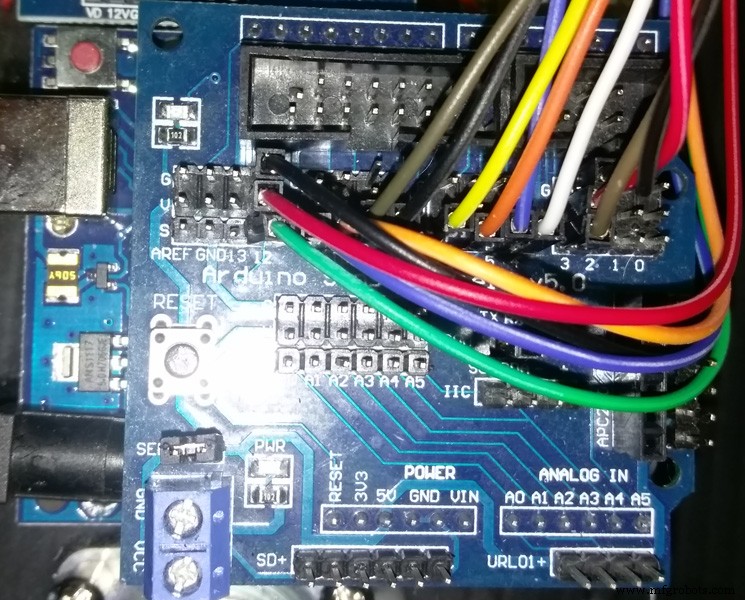
Arduino UNO et bouclier de capteur
Nous avons utilisé le bouclier de capteur UNO R3 pour que les enfants puissent connecter plus facilement les pièces. Vous enclenchez ce bouclier sur l'Arduino et il est prêt à l'emploi.
Carte de commande de moteur
Nous avons utilisé ce bouclier de pilote de moteur afin de permettre aux enfants de connecter plus facilement leurs moteurs.
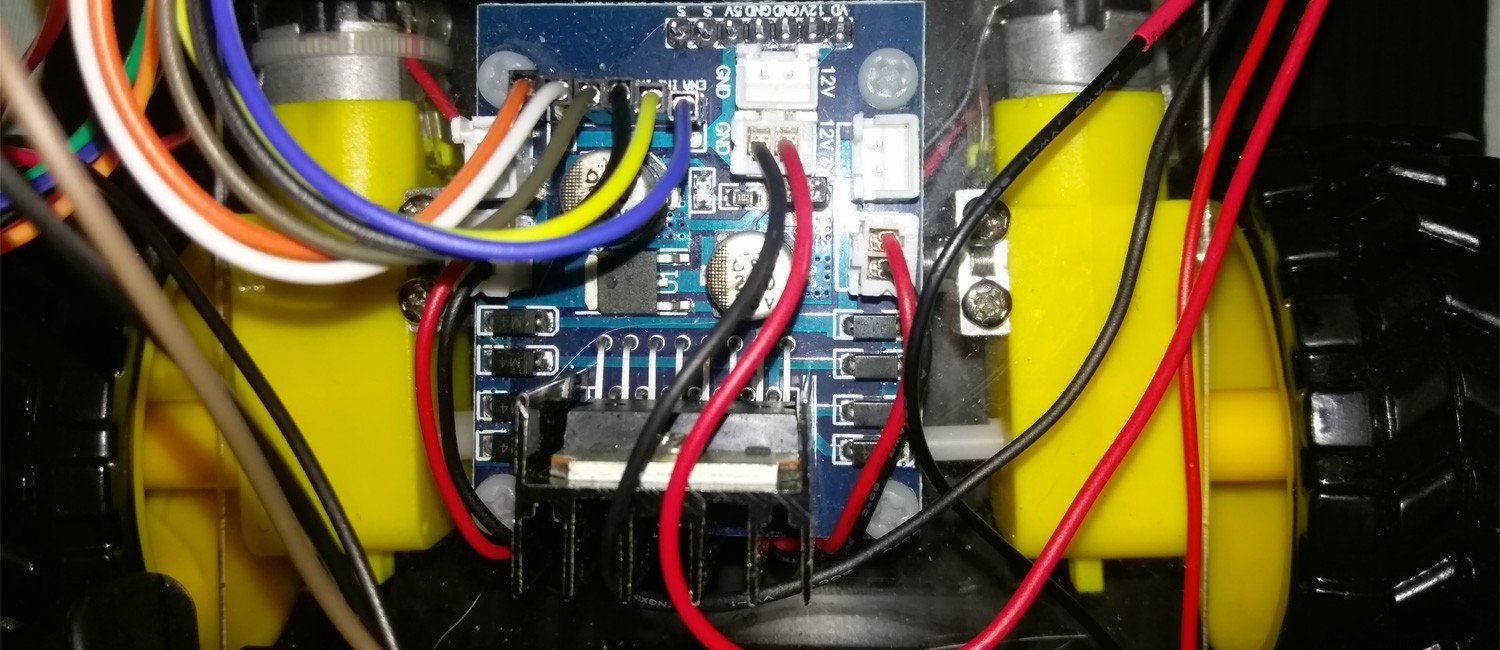
Pour économiser sur les coûts, nous avons fabriqué nos robots 2WD avec 2 moteurs arrière et une roue avant pivotante. Cependant, le blindage du pilote de moteur prend en charge les 4 roues motrices, vous pouvez donc facilement assembler 2 moteurs supplémentaires pour l'avant.
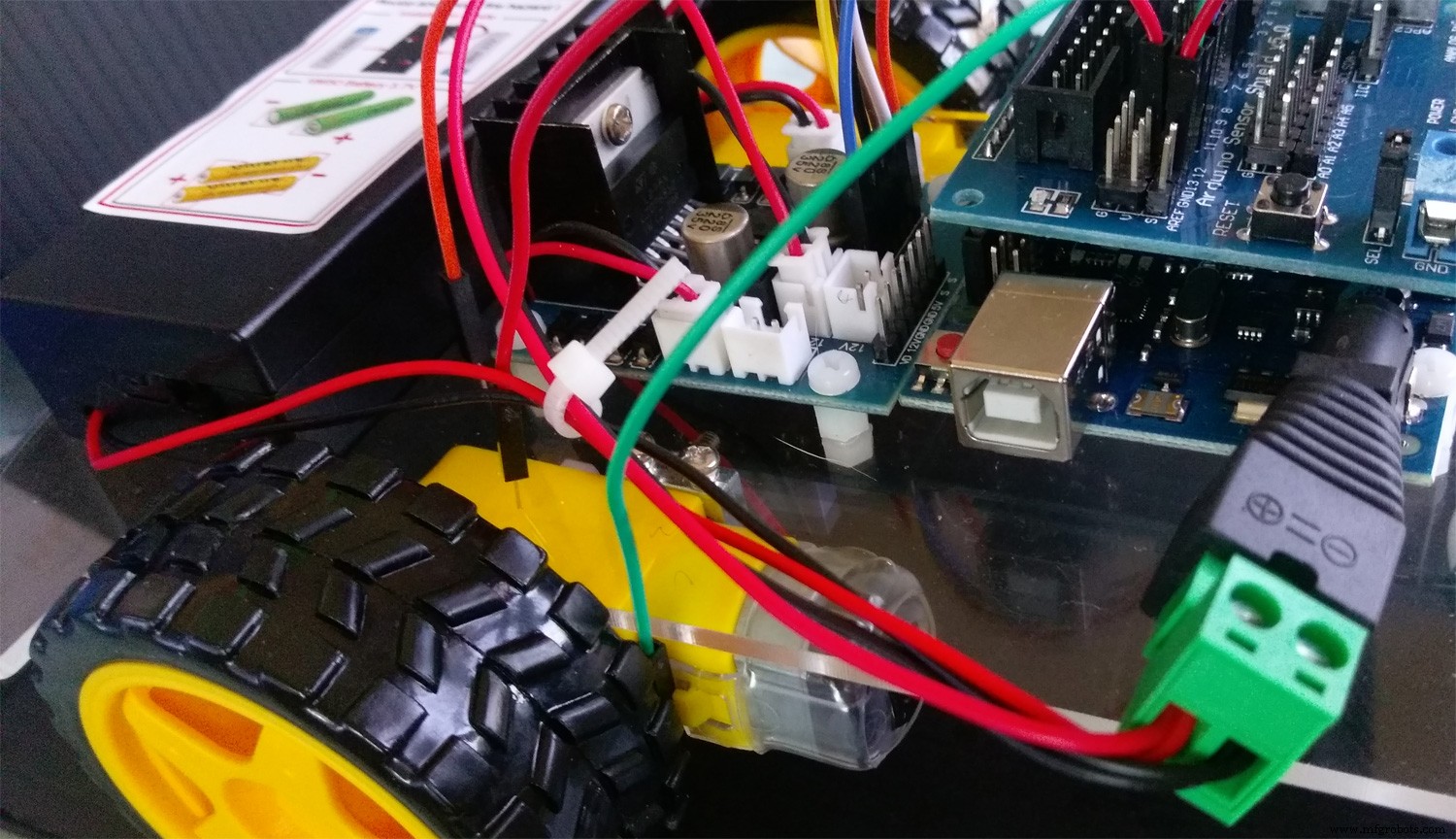
Boîtier de batterie 18650
Nous avons choisi ces boîtiers de batterie car ils avaient des fils de 6" facilitant la connexion à l'Arduino.
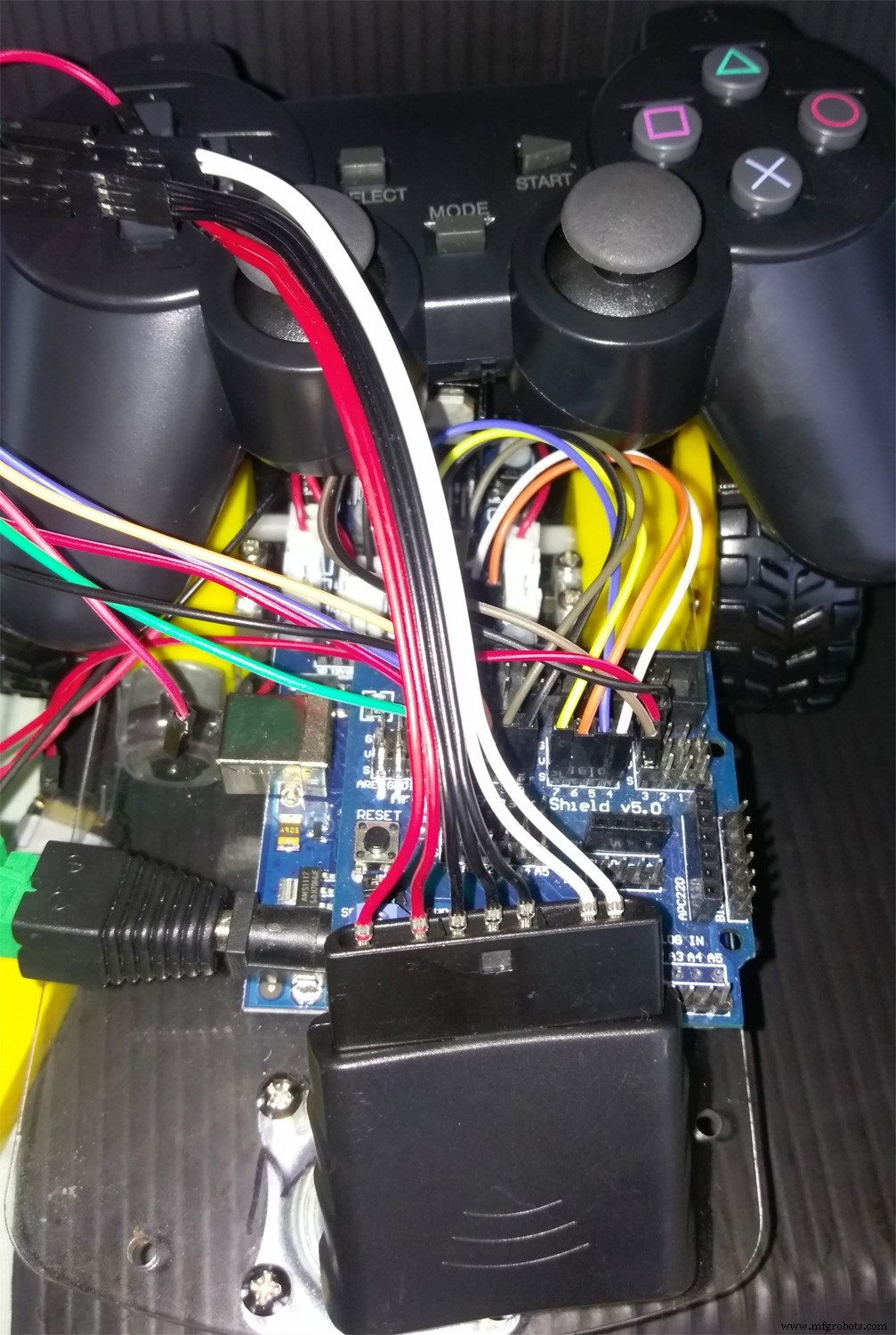
Manette PS2
Nous avons également connecté les robots à une manette PS2 connectée via Bluetooth.
Il existe des tutoriels qui vous apprendront comment modifier une manette PS2 existante pour une utilisation avec votre bot, mais nous en avons utilisé une que nous avons obtenue d'eBay et qui a déjà été modifiée. Il y a un lien vers ce contrôleur sous les composants et fournitures.
Autres fournitures
Nous avons également utilisé des cavaliers (mâle/mâle et femelle/mâle), du ruban adhésif, des vis, des écrous, des boulons, des chevilles en bois, du ruban adhésif double face et du ruban velcro pour assembler les pièces.
De plus, nous avons imprimé en 3D certaines pièces personnalisées qui ont été utilisées pour les palmes, les fileurs et les connecteurs de moteur. Il existe des liens vers les fichiers STL pour l'un des cônes et les connecteurs du moteur sous "PIÈCES ET BOÎTIERS PERSONNALISÉS".
C'était très amusant de construire ces robots de combat ! Nous avons adoré voir certains des concepts proposés par les enfants en utilisant les fournitures limitées qui leur ont été données. C'était formidable de voir les progrès qu'ils ont accomplis alors qu'ils testaient leurs bots au combat et apportaient des modifications en fonction de l'endroit où ils voyaient les faiblesses.

Vidéos de combat
- Voir le câblage et les schémas ici
- Téléchargez le code ici
- Téléchargez les pièces imprimées en 3D ici
- Obtenir la liste des pièces utilisées ici
Code
Battlebot avec manette PS2
Code qui permet de contrôler le robot de combat avec une manette PS2Pièces et boîtiers personnalisés
Il s'agit d'une toupie imprimée en 3D que l'un des étudiants a créée et qui était attachée à l'un des moteurs. Il est activé lorsque le bouton X de la manette PS2 est enfoncé. Il s'agit d'une pièce de connecteur imprimée en 3D que nous avons utilisée pour fixer aux extrémités des moteurs afin que nous puissions facilement y connecter des chevilles.12 pack de la pièce de connecteur imprimée en 3D que nous avons utilisée à fixer aux extrémités des moteurs. Utilisez ceci si vous souhaitez en imprimer beaucoup pour une classe, sinon utilisez le connecteur de moteur - Single Piece .stl pour n'en imprimer que 1.Schémas
C'est le câblage de la carte moteur. Montre comment les moteurs sont connectés à la carte moteur et également comment les fils sont connectés de la carte moteur au blindage du capteur.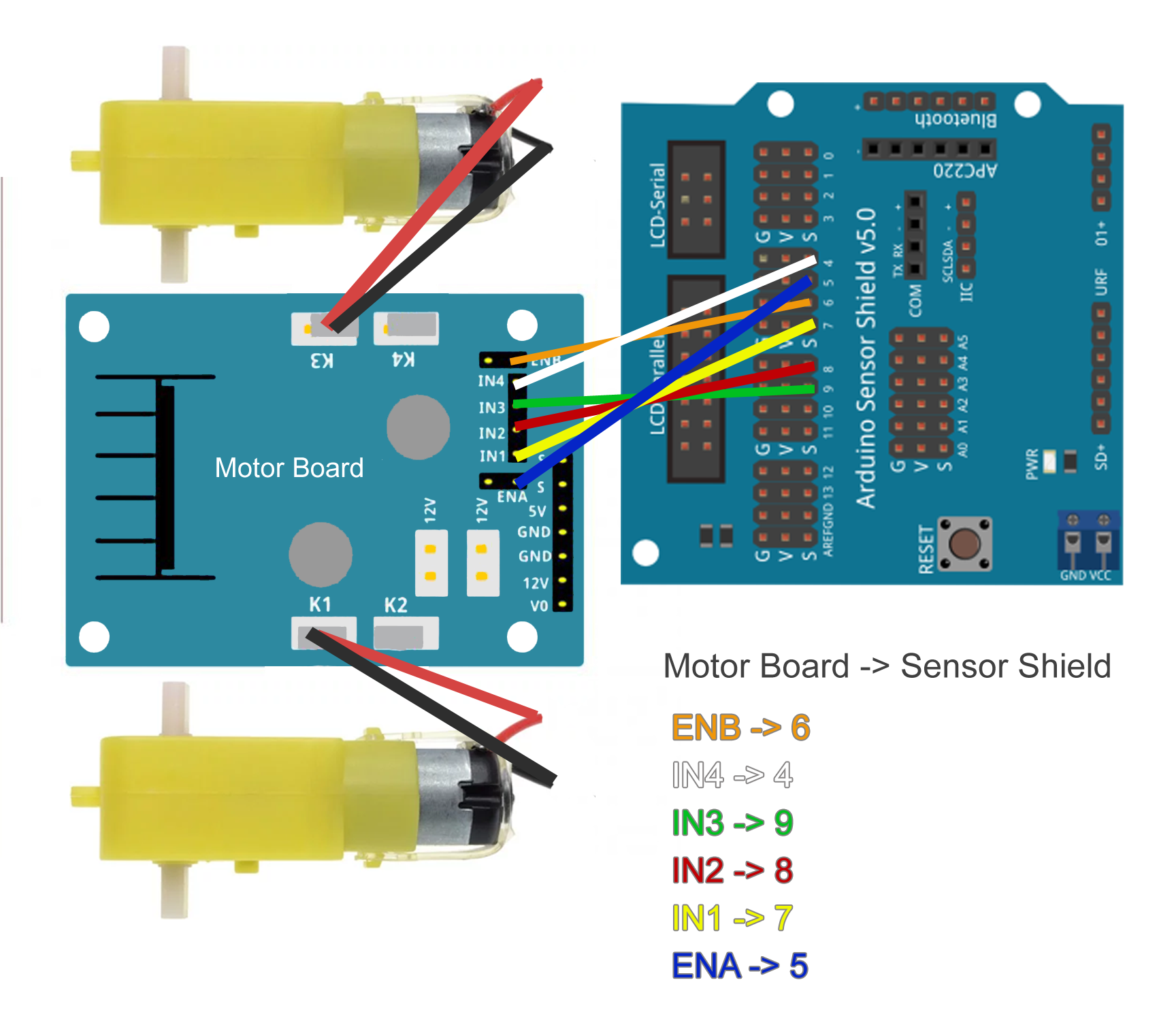 Schéma qui montre comment connecter le câblage Bluetooth jusqu'au blindage du capteur.
Schéma qui montre comment connecter le câblage Bluetooth jusqu'au blindage du capteur. 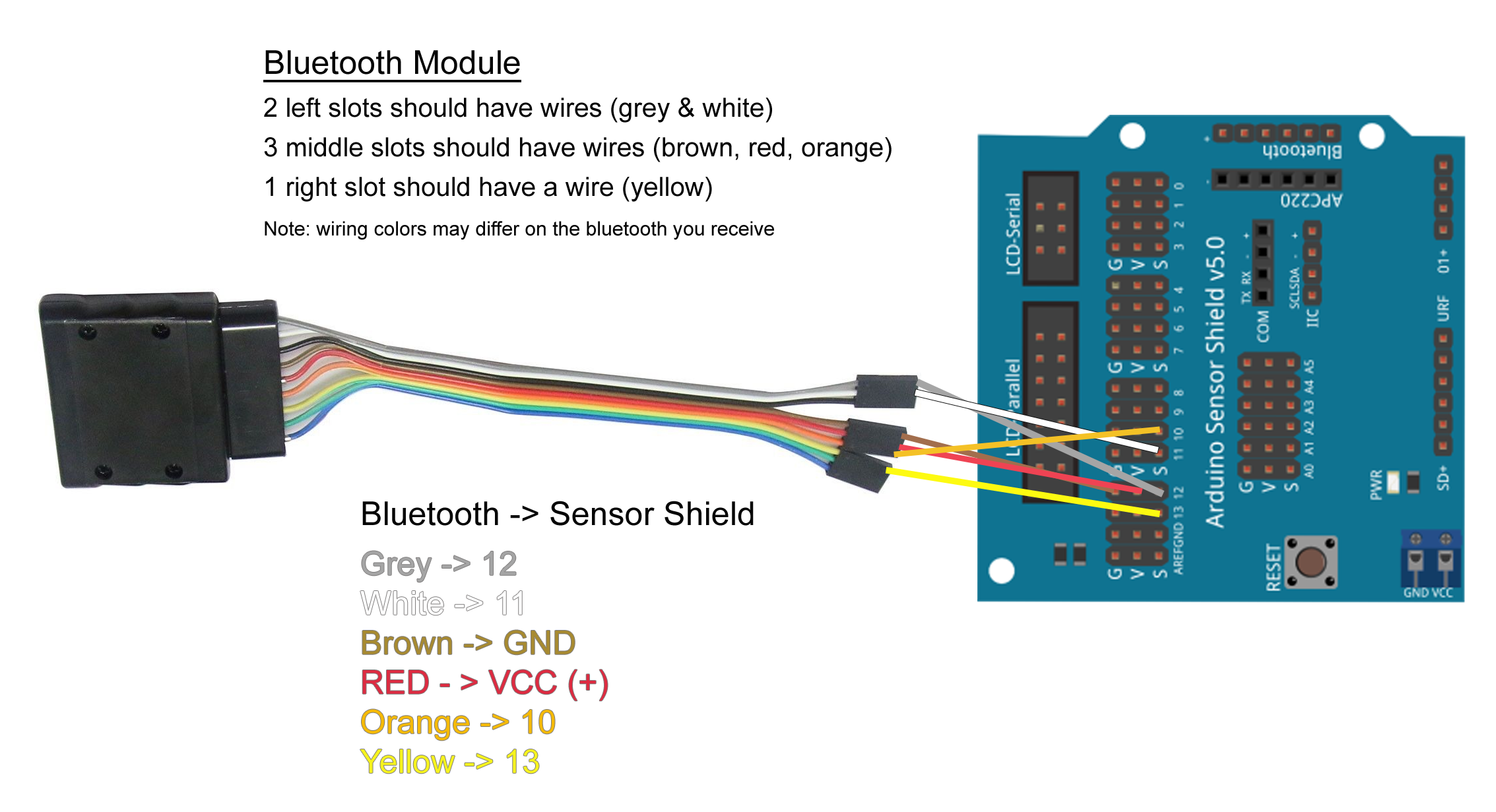 Ceci est un moteur supplémentaire qui a été ajouté pour activer un flipper lorsque le bouton PS2 X est enfoncé.
Ceci est un moteur supplémentaire qui a été ajouté pour activer un flipper lorsque le bouton PS2 X est enfoncé. 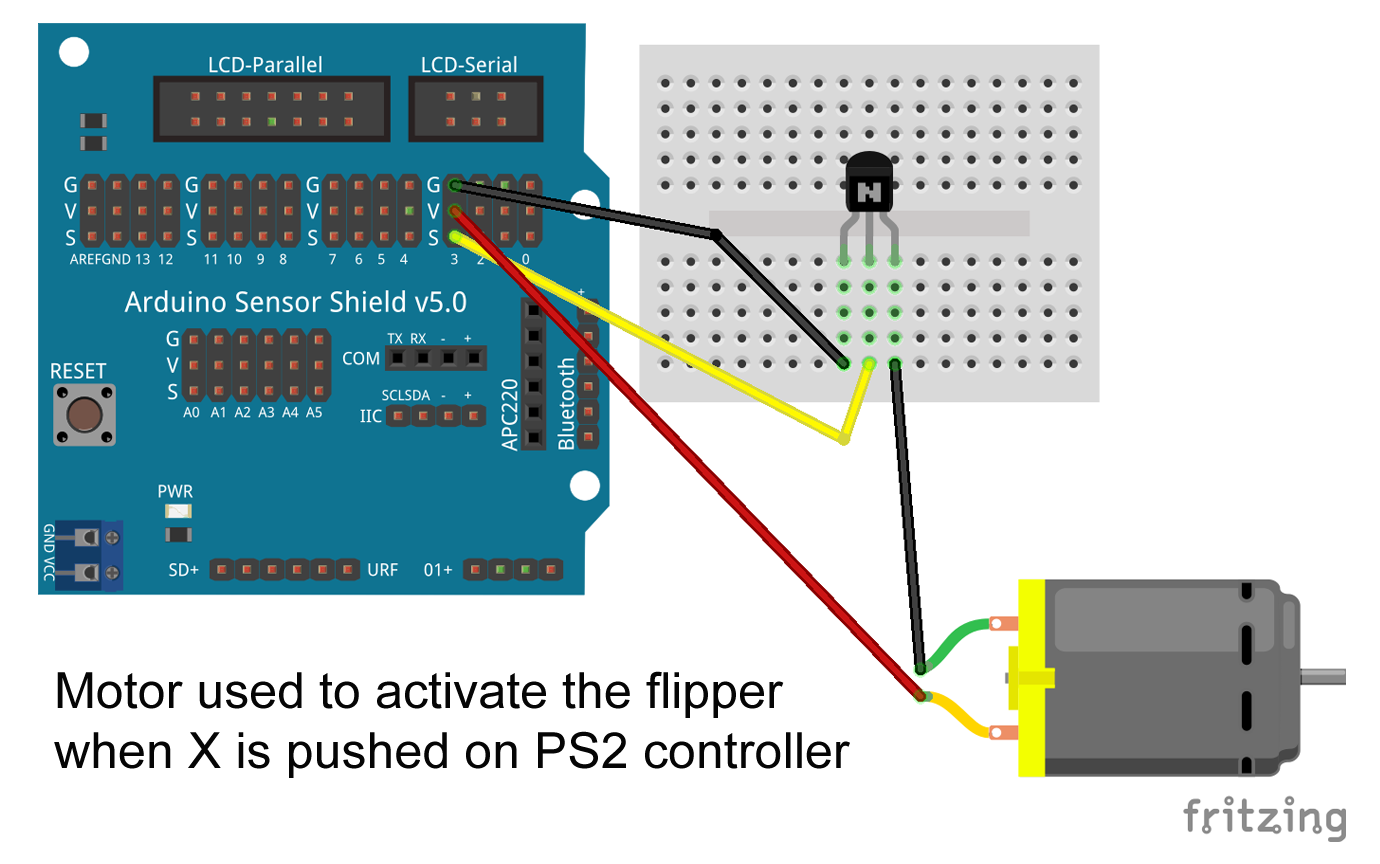
Processus de fabrication
- Contrôleur Smart Home 433MHz avec Sensorflare et RaspberryPi
- Contrôleur d'irrigation Win10 IOT avec capteurs d'humidité
- Utilisation de la carte PSoC 6 Pioneer avec le Pioneer IoT Add-on Shield
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Construire une poupée Squid Games avec Arduino UNO
- Contrôleur DMX Web
- Horloge Arduino avec heures de prière islamique
- Contrôle de ventilateur PWM 4 broches 25 kHz avec Arduino Uno
- Constructions en plusieurs étapes avec conteneur