


Réservoir de WalaBeer
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Outils et machines nécessaires
 |
| |||
 |
| |||
| ||||
| ||||
|
Applications et services en ligne
 |
| |||
 |
| |||
 |
| |||
 |
| |||
| ||||
|
À propos de ce projet
Résumé
Il y a des choses que tout homme veut avoir au fond de lui. La combinaison de la bière et des réservoirs est l'une de ces choses ! Ce projet portera sur cette chose, un réservoir à commande vocale qui vous livre de la bière avec une fonction "follow me" autonome ou avec une commande RC. Construisons la citerne à bière de nos rêves !

Châssis
Nous avons besoin d'une bonne base pour le réservoir. J'ai trouvé ce châssis sur banggood. C'était assez bon marché et ça avait l'air si cool que j'avais besoin d'en acheter un.

Juste après avoir reçu le produit est venu le premier problème. En raison d'un emballage inapproprié, il a subi de graves blessures lors de l'expédition.
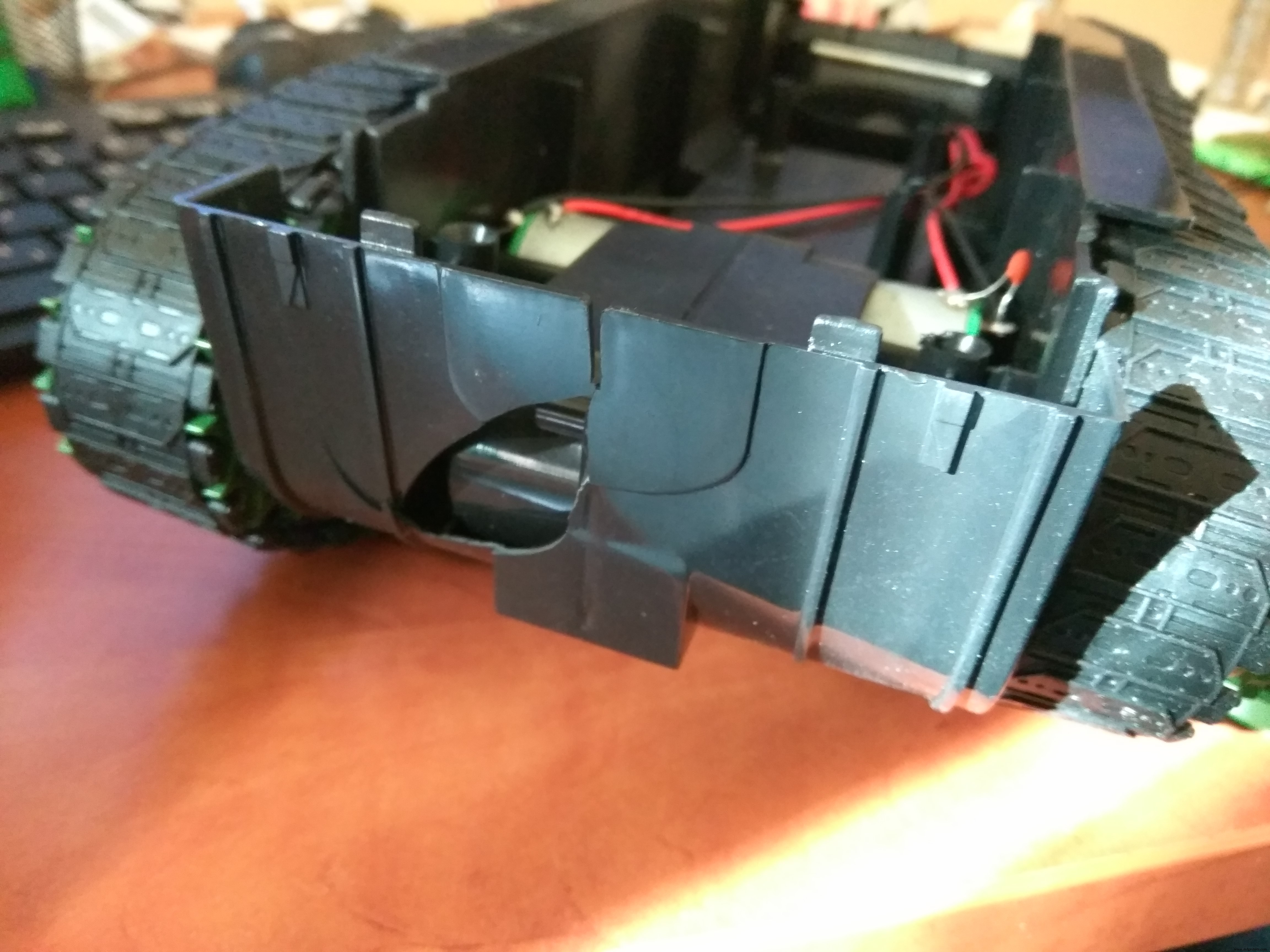




Cela m'a pris beaucoup d'heures et beaucoup de colle, mais heureusement, j'ai surtout pu le réparer.
Grue
Le châssis du réservoir contient à la fois les moteurs et les boîtes de vitesses, l'étape suivante consistait donc à déterminer comment servir la bière. Après de nombreuses idées, j'ai compris que la façon la meilleure et la plus cool de le faire était de cacher la bière, puis de l'élever à l'aide d'une grue. Voici le design de base que j'ai proposé :
J'ai utilisé mon ancien kit de construction en métal car j'avais besoin d'un squelette solide mais facile à modifier. La grue est connectée à un moteur pas à pas avec une ligne de pêche. Le moteur pas à pas 28byj-48 était idéal à cet effet. Il n'est pas rapide mais il pourrait facilement soulever la grue et la bière. En fait, le moteur est si puissant que si je ne l'arrêtais pas à temps, il cassait la ligne de pêche.
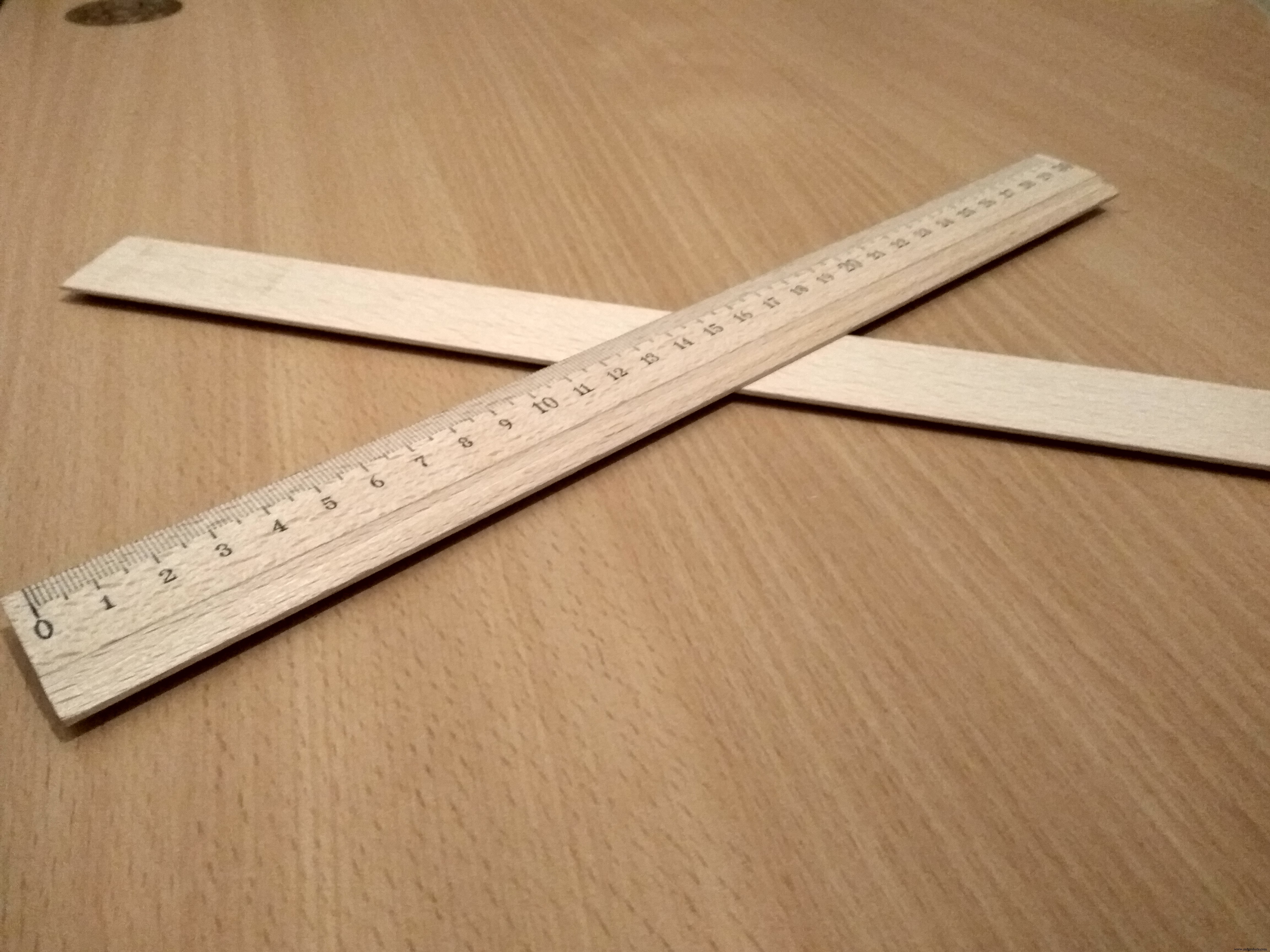
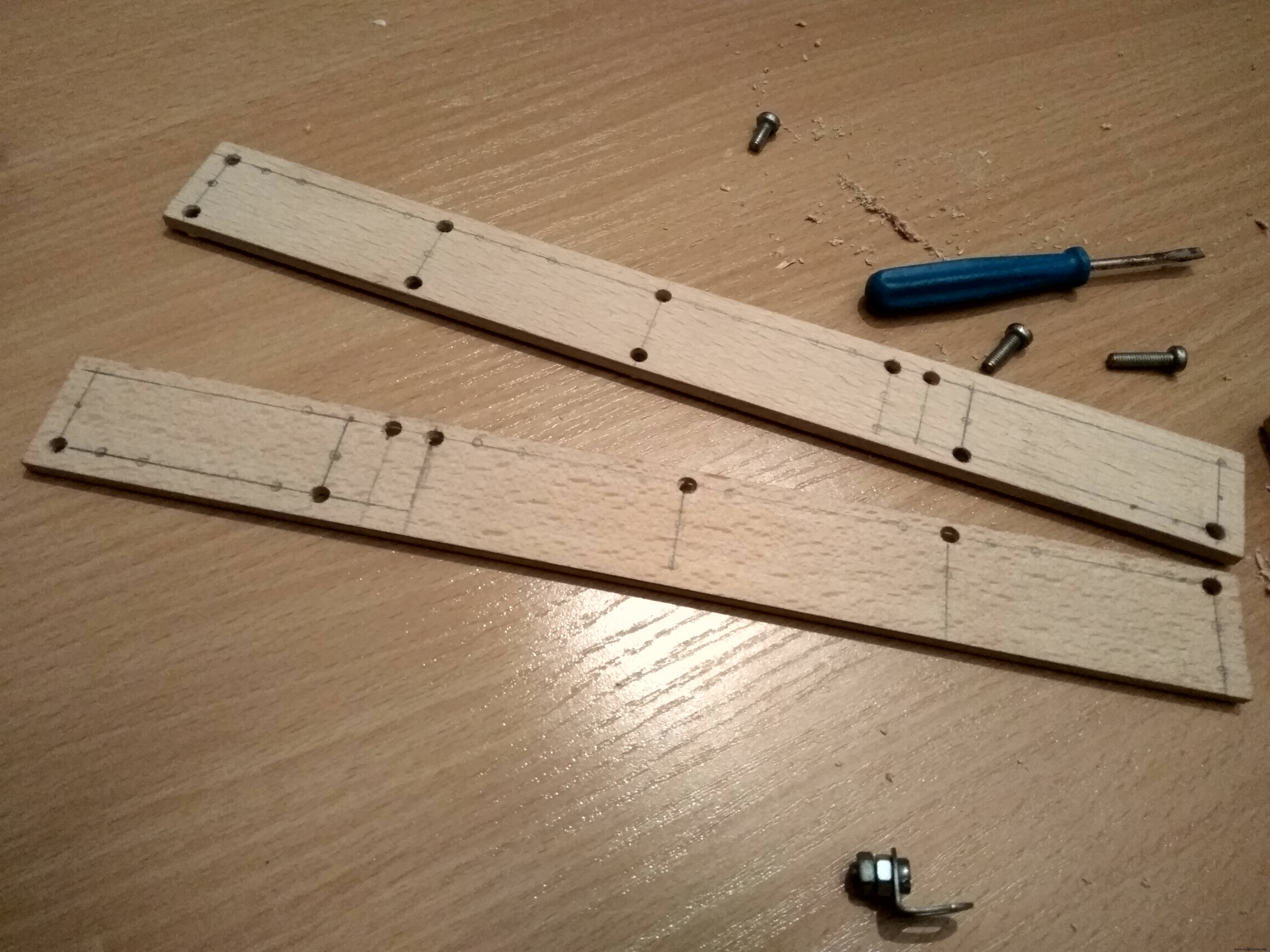
Cela a fonctionné à merveille, cependant le squelette n'était pas assez solide et a commencé à se plier très tôt. Pour résoudre ce problème, j'avais besoin d'augmenter l'intégrité structurelle. J'ai utilisé deux règles en bois dur de 30 cm de long et quelques pièces supplémentaires pour le rendre plus solide. Après quelques perçages, sciage et râpage voici la prochaine version :
Comme vous pouvez le voir, les modifications ont résolu le problème de flexion et il est très stable.
Cas
Un Walabot (version développeur) sera l'« œil » du tank. Plus d'informations sur Walabot dans la section Walabot. La place avant a une partie support pour le Walabot. J'avais une pièce métallique qui a la taille parfaite pour utiliser le support magnétique de Walabot. J'ai également réalisé une forme de logo Walabot avec de la colle chaude pour empêcher le Walabot de tourner sur la partie ronde :



Le montage magnétique est génial car je peux facilement utiliser un Walabot dans plusieurs projets sans aucun démontage sérieux et il est également assez solide.
J'ai commencé à faire un cache autour du cadre pour cacher les pièces. J'ai utilisé du papier cartonné noir et des feuilles de plastique pour la couverture.



À ce stade, la partie avant et médiane n'était pas couverte. J'avais aussi besoin d'une trappe sur le dessus pour cacher complètement la bière. Pour déplacer la trappe, j'ai utilisé deux servos, du bleu chaud et du ruban isolant. Cette porte supérieure utilisée uniquement pour le design, elle ne protège pas vraiment la bière. Cependant, il fait très frais lorsqu'il s'ouvre et élève la bière.


Les portes sont constituées de deux feuilles de plastique, de bâtons de bois et de papier collé et enroulé, collés ensemble avec de la colle chaude. Ce n'est pas la plus jolie chose, mais dans la vraie vie, ça n'a pas l'air si mal. J'ai tout peint en noir. Dans la vraie vie, il est beaucoup plus difficile de voir la différence entre les parties noires.

Grue - Vol. 2
Revenons à la grue une fois de plus. J'avais besoin d'une autre chose pour l'utiliser de manière fiable :les commentaires.
À l'origine, je voulais utiliser un simple retour binaire pour cela. Lorsque la grue est abaissée, elle ferme un circuit. Une fois élevé, il s'ouvrirait :les vis et le ressort dans le cercle rouge auraient été cet interrupteur. Il aurait utilisé une minuterie pour déterminer la position supérieure.
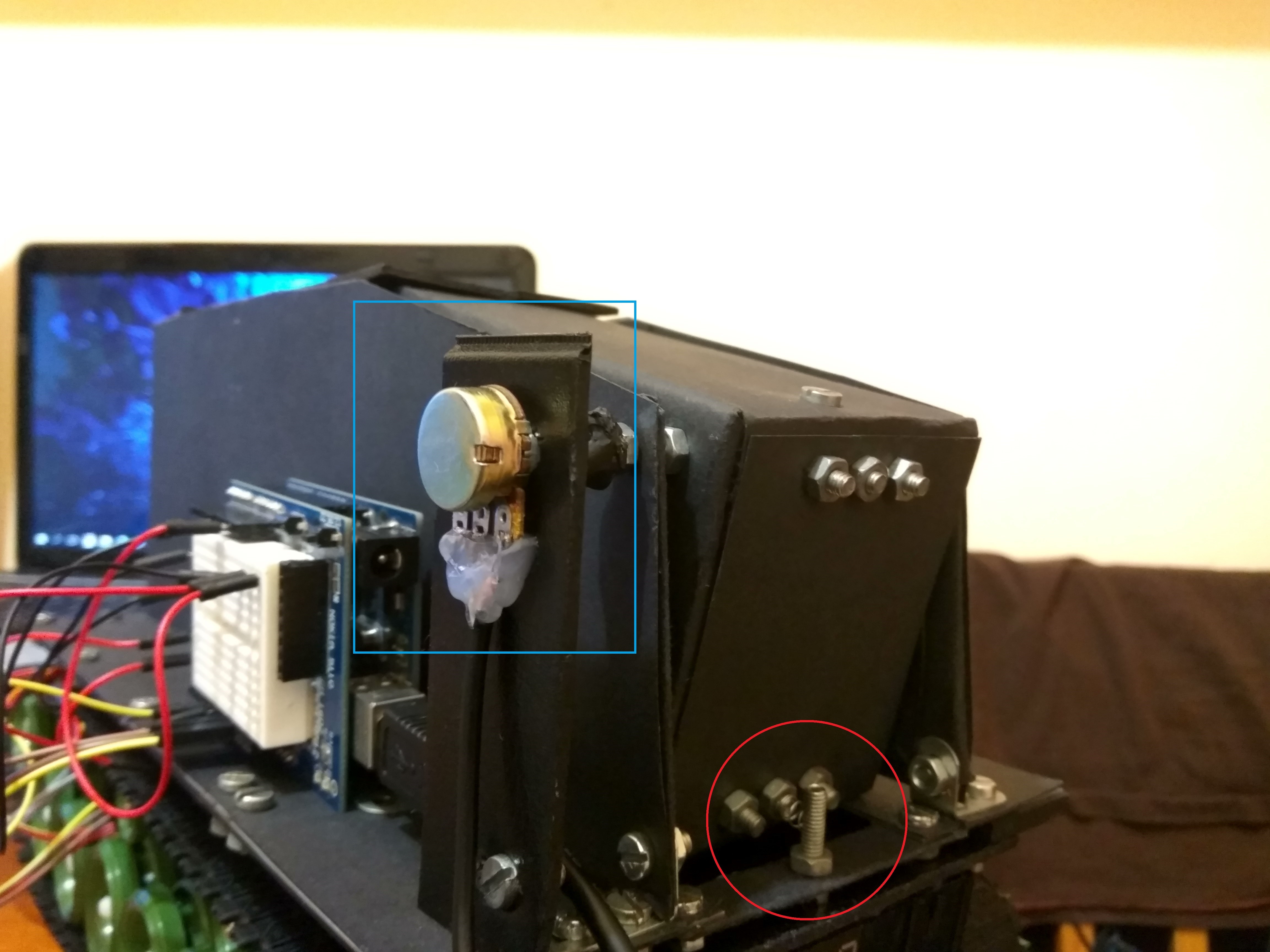
Ce n'était pas trop sophistiqué mais l'idée est travaillée. Malheureusement, ce n'était pas du tout fiable et cela aurait pu facilement endommager la grue.
J'ai trouvé une autre solution bien meilleure, celle du rectangle bleu. J'ai collé un potentiomètre 10K sur le et de l'arbre de la grue, j'ai donc un retour fiable sur l'angle actuel de la grue. Il est très facile de déterminer les positions supérieure et inférieure de cette manière. Pour info :jusqu'à présent, j'ai utilisé mon bon vieil Arduino Uno pour les tests car son proto shield est très pratique.


En fait, j'aime beaucoup cette partie des commentaires. Ce n'était pas prévu mais cela ajoute un peu plus de fraîcheur au look du char.
Circuit
D'accord, le corps du char est terminé mais il nous faut de l'électronique pour le faire bouger !
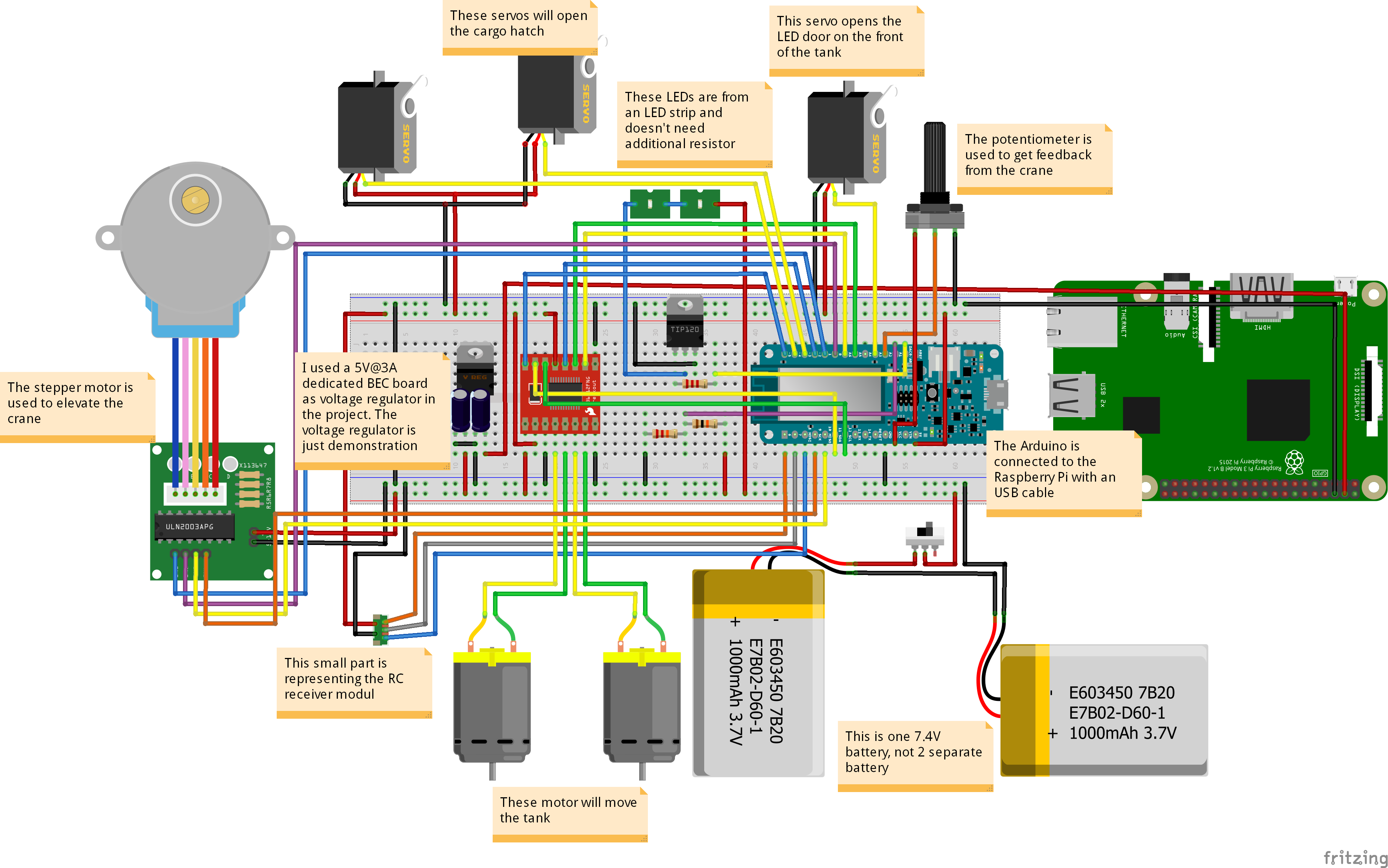
J'ai également placé cette image dans la section Schémas, mais ici vous pouvez l'agrandir sans la télécharger. Le circuit peut sembler un peu complexe au début mais en réalité il est assez simple. Les notes jointes devraient vous aider pour tout ce qui nécessite des explications.
Ce projet n'utilise pas la fonctionnalité WiFi de l'Arduino MKR1000 pour le moment, mais comme je le sais, vous ne pouvez pas simplement le remplacer par un Arduino Uno si vous souhaitez contrôler le réservoir à l'aide d'un émetteur RC. Mon projet utilise 3 canaux pour contrôler la vitesse, le virage et la grue. J'ai besoin de 3 broches avec une capacité d'interruption externe. Les Arduino Uno n'ont que 2 broches à cet effet. Nous avons besoin de ces broches pour lire les valeurs PWM des canaux correspondants du récepteur RC.
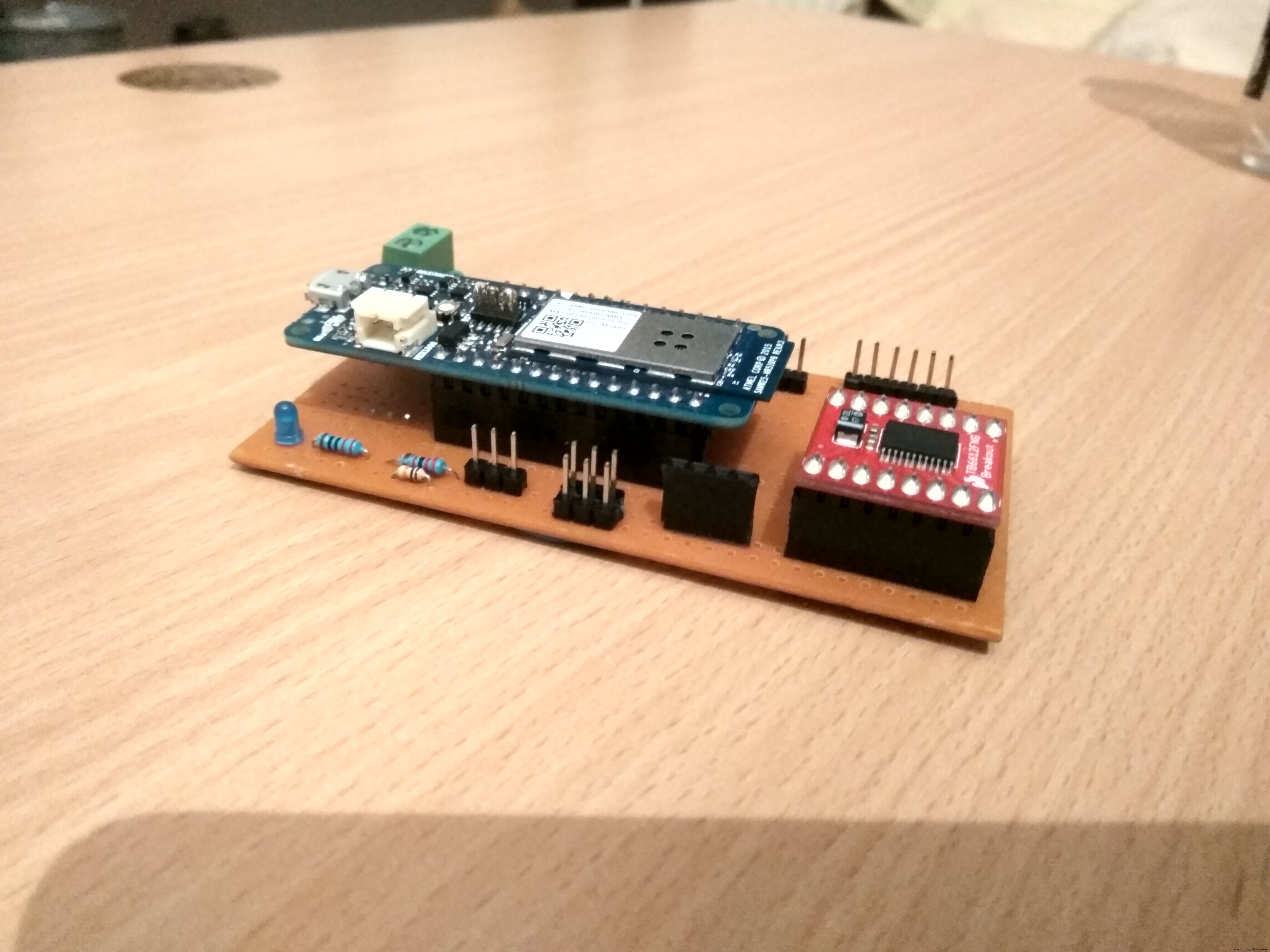
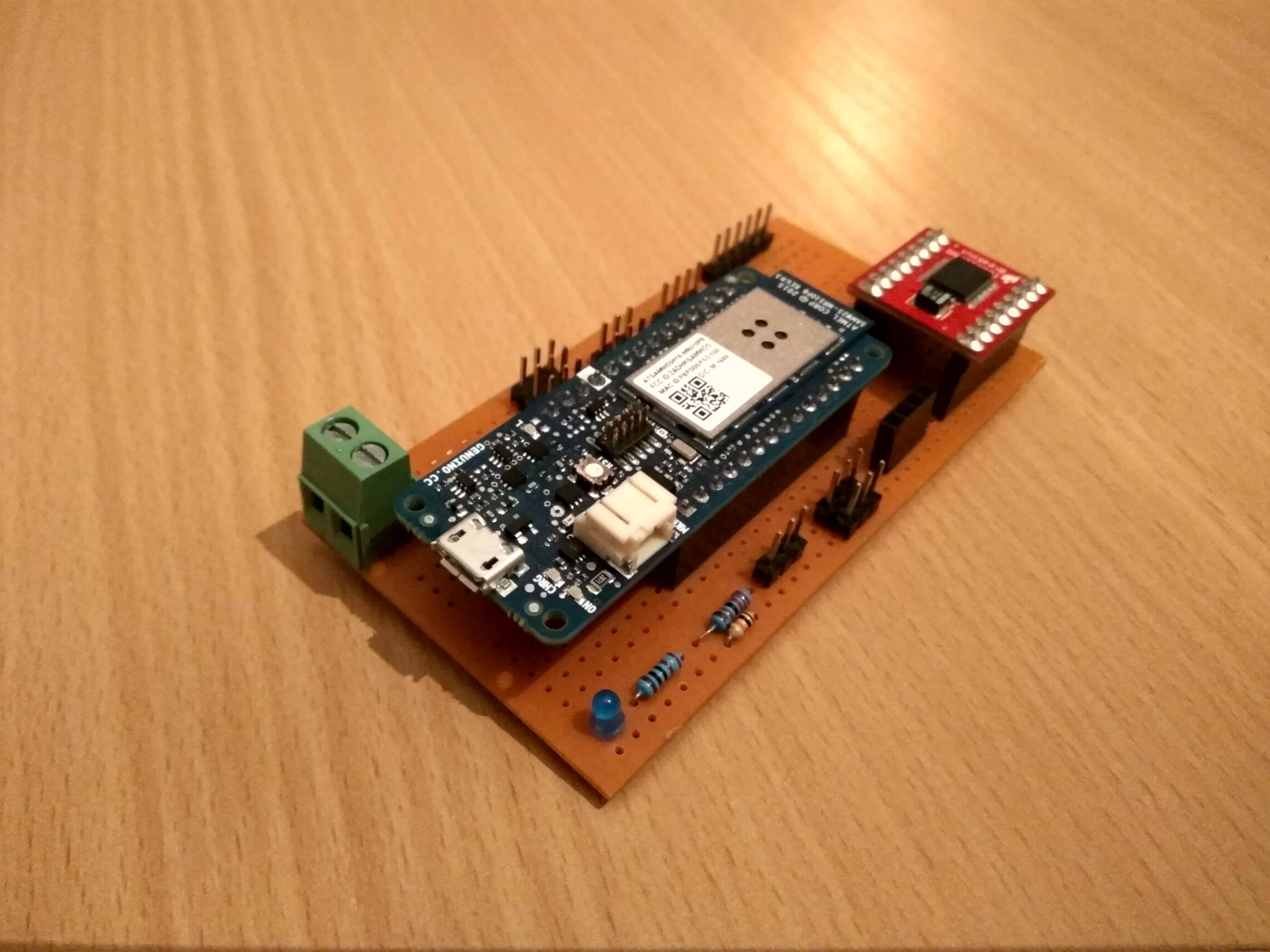
J'ai construit le circuit sur un proto PCB. Il est devenu assez compact. La LED bleue sur la gauche aurait été une simple LED "intégrée" pour le débogage, mais je ne l'ai jamais réellement utilisée. Le connecteur vert est utilisé pour connecter la batterie LiPo.
La plupart des fils qui se connectent à cette carte se trouvent sur la partie supérieure du réservoir. Il était évident d'y coller la planche pour éviter l'enfer du fil.
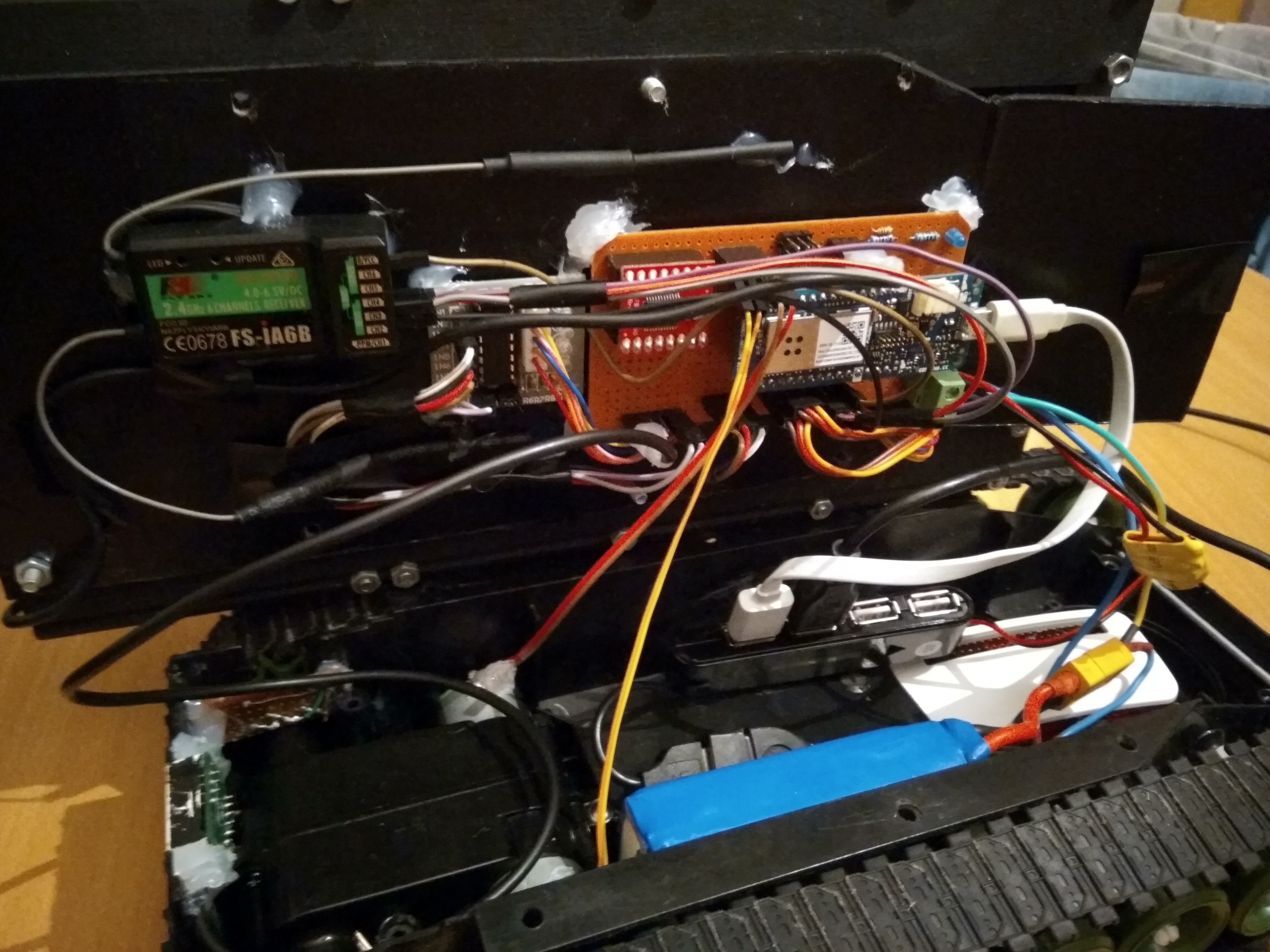
Comme vous pouvez le voir sur l'image, à l'origine j'ai commencé avec un Raspberry Pi Zero W, mais en raison du manque de puissance je suis passé à un Raspberry Pi 3 B.
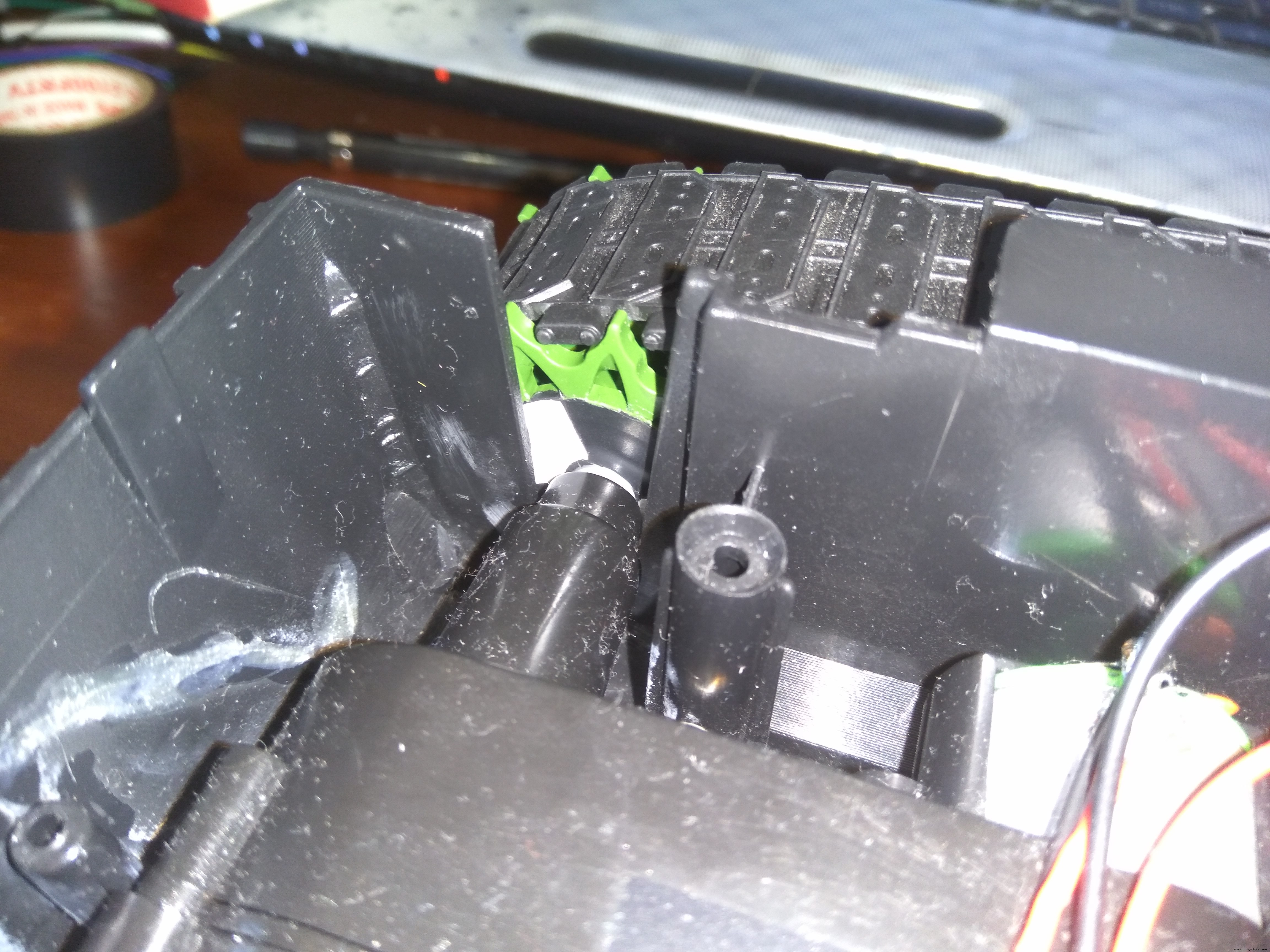
Cela fonctionnait parfaitement à ce stade, mais j'ai ajouté une fonctionnalité supplémentaire:la lampe frontale cachée. La partie en plastique noir à droite peut être facilement déplacée. J'ai attaché un servo pour le déplacer de haut en bas et j'ai également utilisé un segment d'une bande LED 12V. Alimenter une bande LED 12V à partir d'une batterie LiPo 7,4V n'est pas une bonne idée. Les lumières seront très faibles. J'ai remplacé la LED du milieu par un fil pour rendre les LED restantes lumineuses. Cela a parfaitement fonctionné.

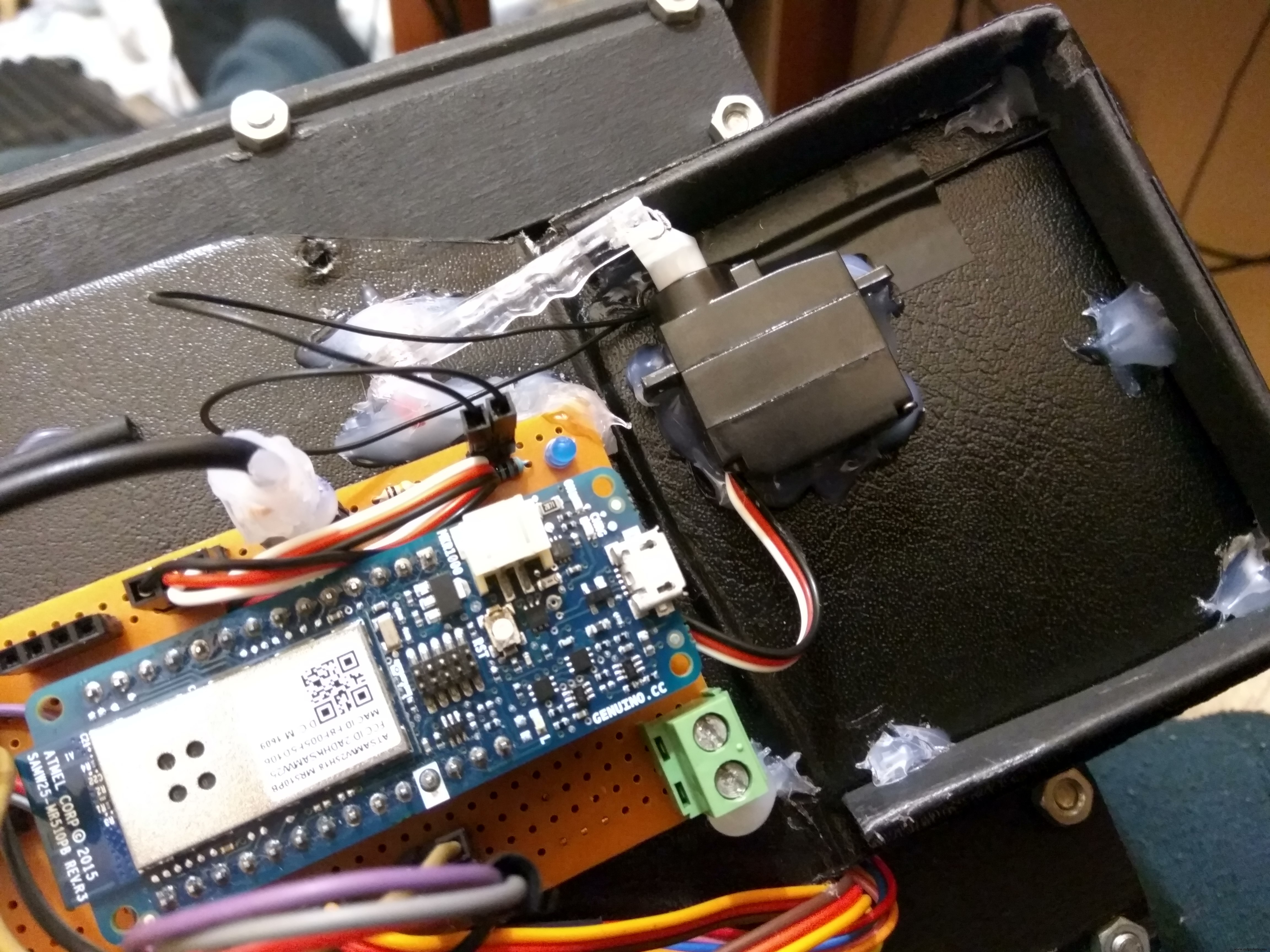
Les LED avant sont contrôlées avec la même broche que la LED indicatrice bleue. J'ai dû modifier légèrement la carte en y ajoutant des en-têtes supplémentaires et un transistor. Le résultat est génial :

Arduino - matériel
J'ai utilisé un Arduino MKR1000 pour contrôler le réservoir. Il s'agit du plus petit périphérique compatible Arduino ou Arduino IDE de ma collection pouvant gérer 3 interruptions externes et disposant de suffisamment de broches pour ce projet. Il a également des capacités WiFi mais je ne l'utiliserai pas maintenant.
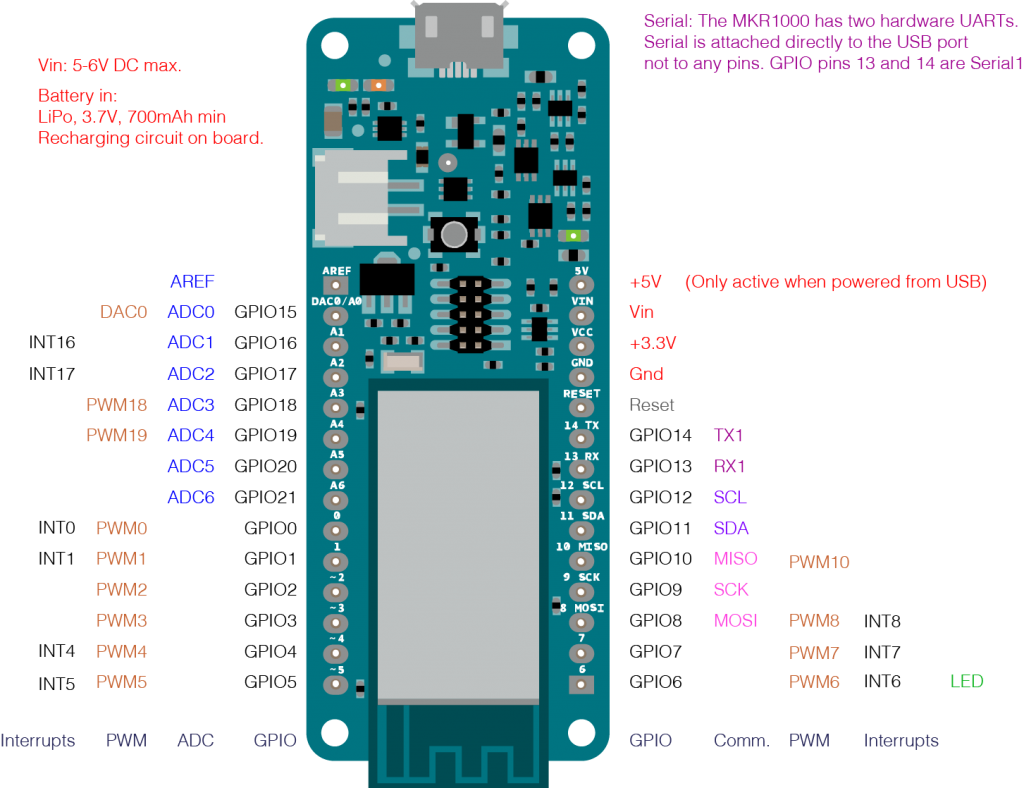
Le réservoir a besoin de 5 broches compatibles PWM. 3 pour les servos et 2 pour les moteurs. Si vous vérifiez les capacités, vous voyez qu'il y a 12 broches compatibles PWM. C'est assez bon non? Eh bien oui et non.
Les broches 2 à 5 portent le marquage ~. Je pense que cela signifie que seules ces quatre broches sont capables de créer des signaux PWM matériels. Je pense que les autres broches ne peuvent créer que des signaux PWM logiciels. Les spécifications techniques n'écrivent pas à ce sujet, cependant, lorsque j'ai eu mon premier prototype MKR1000, la documentation ne mentionnait que 4 broches compatibles PWM. Ce quatre. À l'origine, je contrôlais les servos de trappe via deux de ces broches PWM logicielles. La combinaison de la génération PWM logicielle et de la lecture du signal PWM basée sur les interruptions matérielles est à l'origine de ce problème :
J'ai résolu ce problème en utilisant des broches PWM matérielles pour les servos. Malheureusement, j'ai dû utiliser l'une de ces broches pour le servo de la porte LED, car les deux autres broches matérielles devaient contrôler les moteurs. Grâce au pilote de moteur TB6612FNG, je n'avais besoin que de deux broches PWM (et de 4 autres broches numériques) pour contrôler les moteurs. Le servo « porte LED » est beaucoup plus lent que les autres, il fait donc parfois un léger bourdonnement. L'utilisation d'une seule broche PWM logicielle au lieu de deux a également aidé. À l'avenir, je pourrais reconstruire cette partie pour utiliser d'autres moyens d'ouvrir la porte des LED. Le ou les solénoïdes pourraient faire l'affaire.

L'Arduino peut mesurer la tension de la batterie, puis l'envoyer en série. De plus, j'ai intégré un simple voltmètre à l'arrière du réservoir. Il est utilisé comme retour d'information pour l'utilisateur concernant l'état de la batterie. C'est un circuit séparé et non contrôlé par l'Arduino.
Arduino - Radiocommande
Le MKR1000 traite 3 signaux PWM séparés avec des interruptions externes. Le temps d'impulsion des signaux est de l'ordre de 1000 à 2000 us. Le premier canal est utilisé pour calculer une variable appelée motorSpeedBase. C'est la vitesse de base des moteurs et se calcule comme ceci :
motorSpeedBase =(vertical_pulse_time - 1500) / 2 ; Pour contrôler les moteurs, j'ai utilisé des signaux PWM 8 bits, j'ai donc mis les valeurs à l'échelle dans cette plage de -255 à 255. Le MKR1000 peut faire mieux que 8 bits mais il est plus que suffisant pour ces moteurs.
La variable motorSpeedChange est utilisée pour l'agitation et est calculée à partir du deuxième canal. Il est calculé de la même manière que motorSpeedBase. La différence est la division par 3 au lieu de 2 :Cette différence permet de contrôler le réservoir.
motorSpeedChange =(horizontal_pulse_time - 1500) / 3 ; Le 3ème canal est utilisé par un seul commutateur. Il contrôle le mouvement de la grue et des portes d'écoutille. Il se calcule ainsi :
elevated =state_switch_pulse_time <1500 ; Sa valeur est de 1000 us lorsqu'il est éteint et de 2000 us lorsqu'il est allumé. Le résultat est un bool.
La vitesse finale du moteur est calculée comme ceci :
int rightMotorSpeed =motorSpeedBase + motorSpeedChange ; int leftMotorSpeed =motorSpeedBase - motorSpeedChange ; Si le résultat est supérieur / inférieur à la valeur maximale / minimale, la valeur sera définie sur la valeur max / min (255 ou -255). Les broches associées seront mises à jour en fonction des valeurs de motorSpeed. Si une valeur de vitesse n'atteint pas la valeur minimale, ce moteur sera désactivé.
La grue et la trappe sont gérées par cette fonction :
void handleCrane() { int CraneValue =analogRead(CRANE_FEEDBACK_PIN); if (élevé) { if (craneValue Cela commence par vérifier l'état actuel de la grue. S'il doit être élevé mais que ce n'est pas le cas, il mettra à jour les servos des portes d'écoutille et déplacera la grue vers le haut. S'il doit être abaissé mais qu'il ne l'est pas, il abaisse la grue puis ferme la trappe. Les bobines du moteur pas à pas doivent être désactivées à la fin du processus car elles peuvent sérieusement chauffer et vider la batterie si nous en laissons une allumée.
Arduino - Communication Raspberry Pi
L'Arduino est connecté et alimenté par le Raspberry Pi avec un câble USB - micro USB et ils communiquent en série. Le Raspberry contrôlera l'Arduino avec ces commandes :
- s --> désactive la radiocommande et n'accepte que les commandes série. L'Arduino répondra par « OK » à cela et désactivera le contrôle radio. Ce OK fait partie de la façon dont le Rpi reconnaît l'Arduino.
- r --> réactiver la radiocommande
- e --> élever la grue (et ainsi ouvrir la trappe)
- d --> abaisser la grue
- m X Y -> réglage de la vitesse des moteurs. X est motorSpeedBase et Y est motorSpeedChange. X et Y doivent être des entiers
- b --> l'arduino répondra avec un entier :tension de la batterie * 100
- l --> allumer l'éclairage
- o --> éteindre l'éclairage
Il faut noter qu'en cas de contrôle série, l'Arduino désactive les interruptions sur les canaux RC 1 et 2 mais pas sur 3. Le canal 3 (le switch) est utilisé comme interrupteur de sécurité pour désactiver le WalaBeer Tank s'il commence à faire des folies les choses en mode autonome.
Walabot
Voici la partie où Walabot entre en jeu. Walabot est un capteur 3D qui utilise des micro-ondes pour l'imagerie. Il peut faire des choses incroyables comme voir à travers les murs, détecter votre respiration à distance, voir dans l'obscurité, etc. Je ne veux pas écrire de pages sur ses autres capacités parce que d'autres ont fait un excellent travail en le faisant. Cependant, je recommande vraiment de lire à leur sujet.

J'utiliserai Walabot comme seul capteur de navigation sur le char. Pour utiliser le Walabot avec le Raspberry Pi, nous devons d'abord installer le SDK Walabot. Vous pouvez télécharger le SDK à partir d'ici et le site de l'API Walabot vous aidera à l'installer. Il y a beaucoup d'informations utiles et d'exemples sur la façon d'utiliser Walabot. Je recommande de consulter le site.
La consommation électrique du Walabot est comprise entre 0,4 et 0,9 A. Cela signifie que par défaut le Raspberry Pi ne peut pas fournir assez d'énergie pour alimenter le Walabot. Heureusement, il existe un moyen d'augmenter la puissance de sortie des ports USB du rpi en ajoutant cette ligne :`max_usb_current=1` au fichier /boot/config.txt. Comme je le sais, il augmente la puissance de sortie de 600mA à 1200mA.
Ce serait génial mais voici un problème :j'alimente également l'Arduino et les servos depuis le Raspberry. Les moteurs du réservoir et le moteur pas à pas sont alimentés par la batterie, alors j'ai pensé que cela ne devrait pas avoir d'importance. Cependant, il le fait. Si je démarre le Walabot dans cet état, il s'arrête avec le message WALABOT_ERR_PROTOCOL. Il se peut qu'une baisse de tension se produise lorsque j'essaie de le démarrer.
Le circuit éliminateur de batterie peut fournir jusqu'à 3A, c'est donc plus que suffisant ici. Le Walabot dispose de deux ports micro USB. Le port du milieu va m'aider dans cette situation car il peut être alimenté à partir de là tout en communiquant sur l'autre. Pour cela j'ai du faire une modification et enlever le couvercle du Walabot pour déplacer ce jumper


Après ça le Walabot a parfaitement fonctionné, plus de WALABOT_ERR_PROTOCOL.
Le logo au dos (la partie lisse est la face avant) contient quatre aimants intégrés très puissants. Ceux-ci ont été utilisés pour attacher facilement le Walabot à la façade métallique du réservoir sans aucun matériel supplémentaire.
Suivez-moi
L'un des "points de vente" du char est son mode suivez-moi. Si vous demandez au tank à bière de vous suivre, il fera de son mieux et vous suivra. Une fois arrivé à destination, il vous suffit de demander la bière à l'intérieur. C'est une super astuce pour faire la fête !
Le SDK Walabot fournit toutes sortes de façons d'interagir avec le Walabot. Mon projet utilise les getTargets fonction avec Moving Target Identification (MTI). Il est utilisé pour détecter les objets en mouvement devant le Walabot. Avec ma configuration, le getTargets renverra un maximum de 4 cibles et il verra des objets à une distance maximum de 1,5 mètres.
Les cibles ont des coordonnées XYZ et un paramètre d'amplitude. J'utilise uniquement les coordonnées Y et Z car la hauteur (X) n'est pas importante ici. Le problème est qu'il n'y a aucun moyen de dire quelle cible est quoi.
Dans la première version, pour trouver l'humain dans la liste des cibles, j'avais créé une règle :avant de lui ordonner de vous suivre, vous devez vous placer devant le Walabot à une distance de 80 cm. Après cela, mon code suppose que l'objet le plus proche avec une amplitude suffisamment élevée est l'humain. Si l'humain est détecté, tout ce que le tank a à faire est de maintenir l'humain dans la position souhaitée en se déplaçant.
Malheureusement, ce n'était pas parfait. Heureusement, j'ai eu une suggestion pour une approche différente. Ça commence pareil :il faut se placer devant le Walabot à une distance de 80cm. La cible la plus proche du réservoir sera considérée comme l'humain. Après cela, à chaque itération, la position de l'humain sera la cible la plus proche de la position précédente. Si la distance entre la nouvelle et l'ancienne position est trop élevée, le tank ne mettra pas à jour la position de l'humain et s'arrêtera. Le tank essaiera de trouver l'humain autour de l'ancienne position, donc s'il trouve la personne, il continuera à le suivre. C'est une idée assez simple.
Examinons quelques cas sur la vue Arena. Le but du tank est de maintenir l'humain dans la zone cible (rectangle rouge). Le bleu est le plus proche et c'est l'humain dans ces cas :
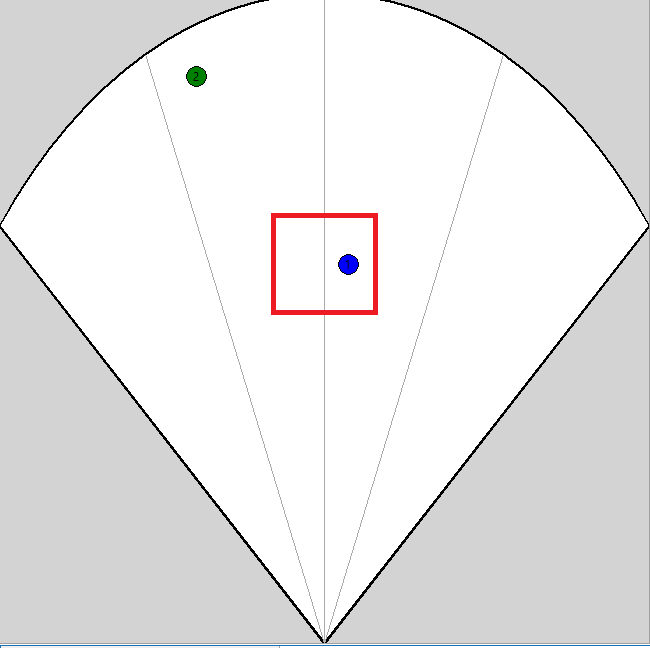
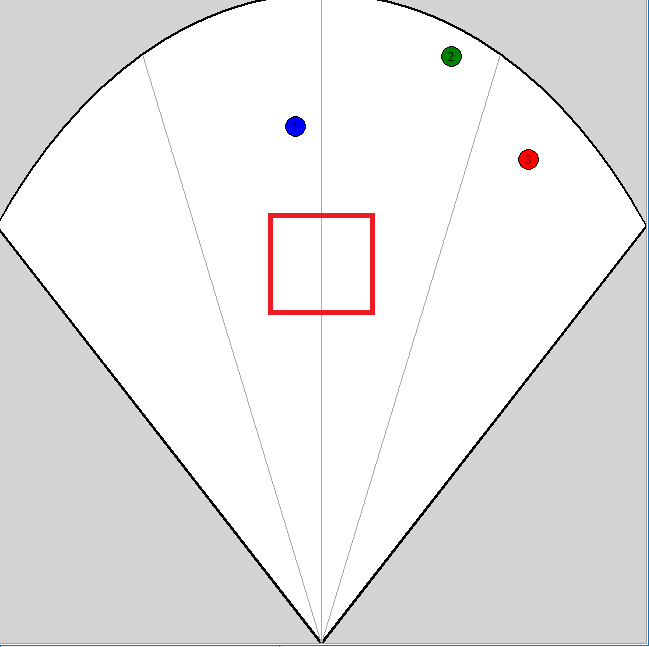
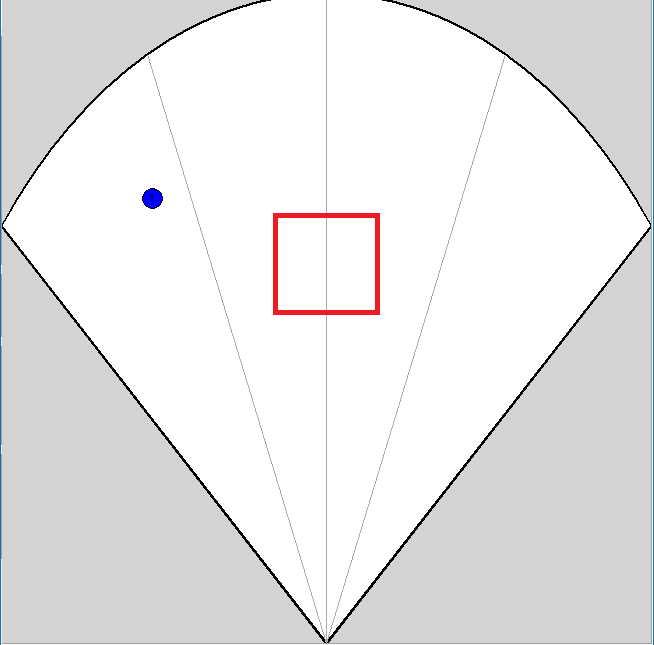
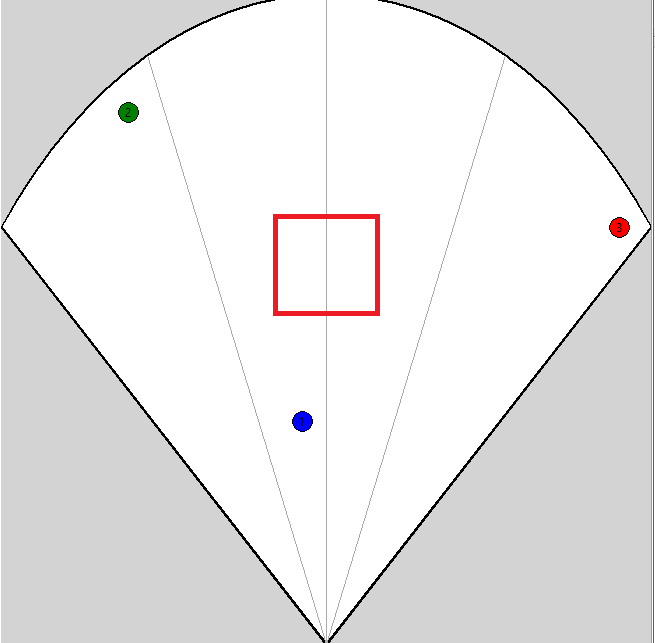
- Cas 1 :L'humain se trouve dans la zone cible, aucun mouvement n'est donc nécessaire
- Cas 2 :L'humain est à droite et il est trop près du réservoir. Au début le tank tournera à droite puis il s'éloignera de l'humain en reculant.
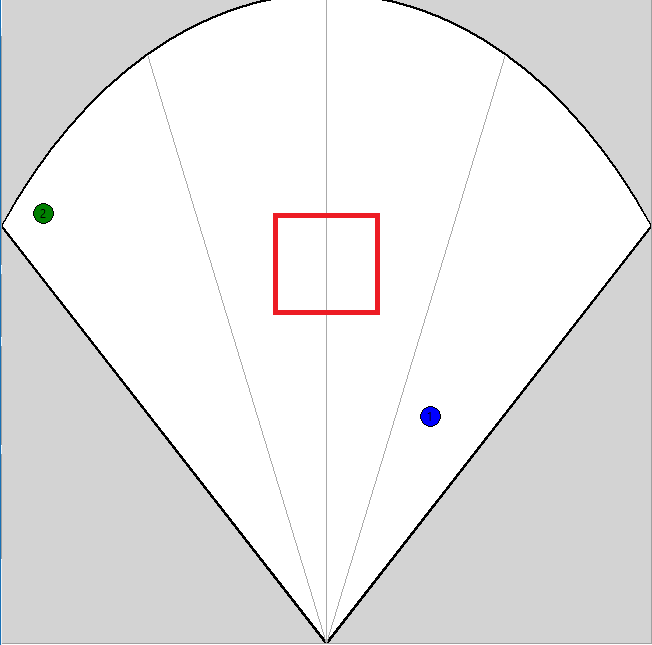
- Cas 3 :Le tank n'a pas besoin de tourner mais l'humain est trop loin. Ça va aller de l'avant. Le Walabot a vu 3 cibles quand j'ai fait cette photo
- Cas 4 :Il n'y a qu'une seule cible sur cette image et elle se trouve à gauche. Le char se déplacera vers la gauche puis vers l'avant.
- Cas 5 :Le tank reculera jusqu'à ce que l'humain se trouve dans le rectangle rouge.
Ces images sont des écrans d'impression de la vue Arena à partir d'une version légèrement modifiée de la démo Walabot-SensorTargets. Mon projet n'a pas besoin et n'a donc pas d'interface graphique mais il utilise les mêmes principes. Je recommande de consulter les autres projets de démonstration à partir de leur page github.
Le mouvement avec la configuration actuelle n'est pas trop fluide. Il ne peut pas avancer et tourner en mode autonome en même temps. La principale raison en est la fréquence d'images du Walabot. Il s'agit d'environ 6 FPS avec les paramètres actuels. It means that the Raspberry gets one update in every 0.16 seconds. This is a problem. A lot can happen in 0.16 seconds. To overcome this issue I slowed down the tank. I used the minimum possible speed to move forward and to turn. I also removed the combination of turning and moving because those movements wasn't reliable with my tracked setup. At higher speeds they overshot a lot and at lower speeds they were less reliable than the current version.
Voice control
In autonomous mode I needed a cool way to control the tank. I used Amazon's Alexa Skill Kit to do this. In the early version I used it with ngrok to directly control the Raspberry. Usually people would be using a version of the Amazon Echo to do this, but unfortunately I don't have such device. I had to use echosim and the Amazon Alexa app from Google Play to do this. The name of the skill is Beer Tank because WalaBeer is something that Alexa doesn't recognize. Buy beer, love beer, etc, but not WalaBeer. You can use these commands to interact with Alexa:
- start beer tank
- turn {on/off} the lights
- {open/close} the cargo hold
- {start/stop} following me
- [stop/cancel]
Here's a video about the first two capabilities:
Some of the voice commands in the video might differ from the current commands due to some requirements during the publishing process (e.g:'stop' changed to 'stop following me'). Controlling a Raspberry Pi using Alexa is very easy, however to get the knowledge to do that is not. For the first time I used ngrok and it was super easy to do this but ngrok is only good for testing purposes. The URL provided by ngrok will change after every restart and there are other problems too. Long story short, I needed a better solution.
I moved on to using AWS Lambda and AWS IoT. They are perfect for my purpose but it was quite difficult to find useful information about how to use them. I mean I found lots of partial tutorials and documentation but usually they were missing some crucial information and/or just didn't work. Finally, I found the youtube channel of Kurt Braun. He made an excellent tutorial that helped me a LOT. I really recommend his videos if you want to use AWS Lambda and AWS IoT:
This other video also helped me when I did the experimenting part. I won't go into details about configuring Lambda and AWS IoT, these videos are containing every necessary information about this topic.
He used Node-RED in his videos. That is a very useful tool, however I needed to use Python instead of JavaScript. Amazon provides an SDK for Python, but I used Paho MQTT Client to make the Raspberry Pi subscribe to my 'wbt' topic's messages. It was easier for me to use.
Finally, here's a video about the current status of the prototype:
As you can see the "follow me" mode is working quite well, but the tank is very slow in this mode. Possibly it is capable of slightly higher speeds but I wanted to be sure that it doesn't do crazy things. Slowing the tank down was needed because at higher speeds it can easily lose me, mostly when it is turning. I've got a couple of ideas how I can significantly increase the speed in "follow me" mode but it will take some time and possibly some extra hardware to implement a solution for that.
You can access my skill here and this is its id:
amzn1.ask.skill.a7453502-b1aa-47fa-a552-ed8e2c792b2e
If you want to publish your skill it might be a good idea to you authentication to differentiate the devices. For that follow this great tutorial.
Canceled
I'd like to write some words about another part that is on the "Most of the electronics are integrated onto the top part" image. I'm talking about these:
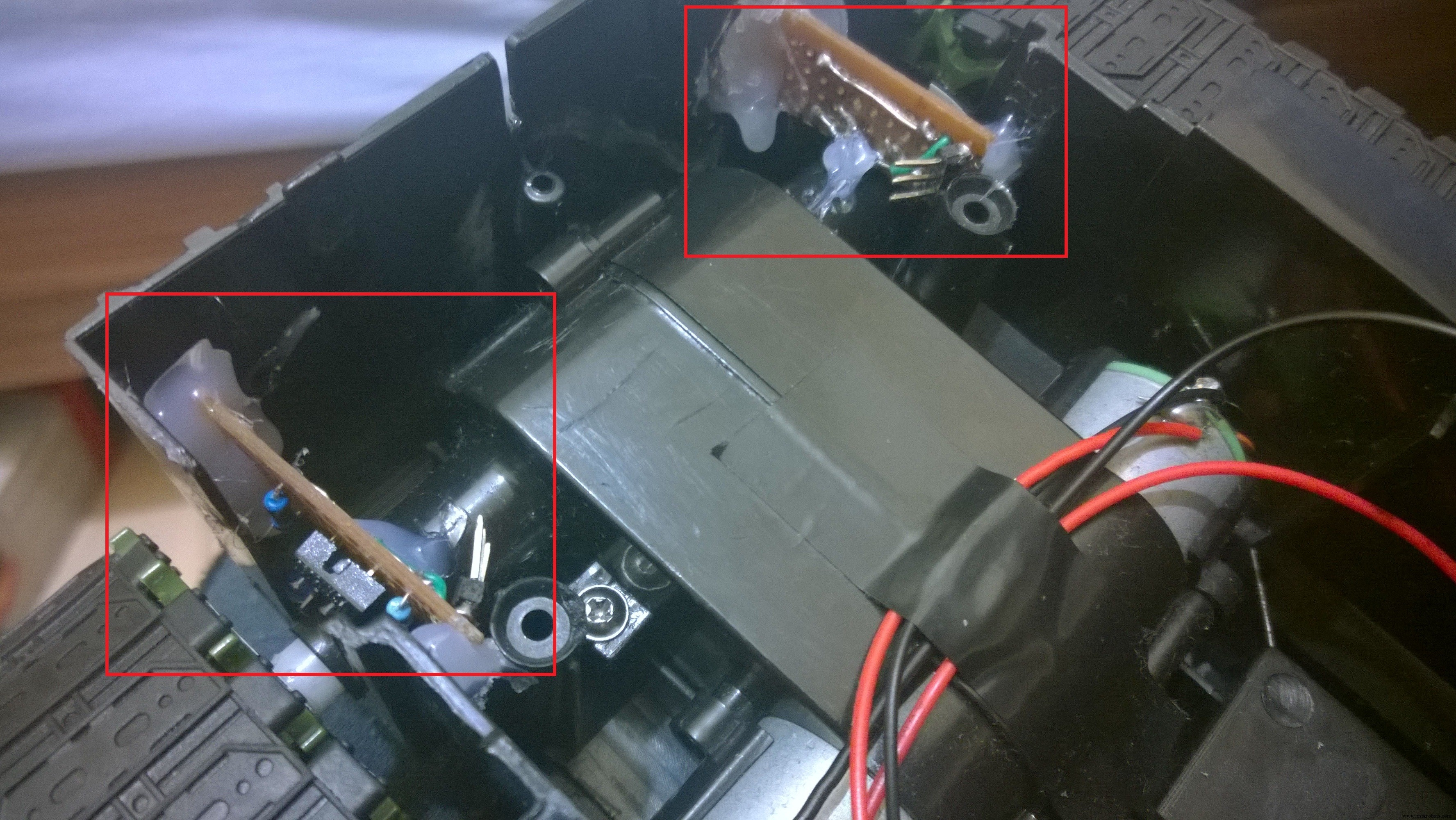
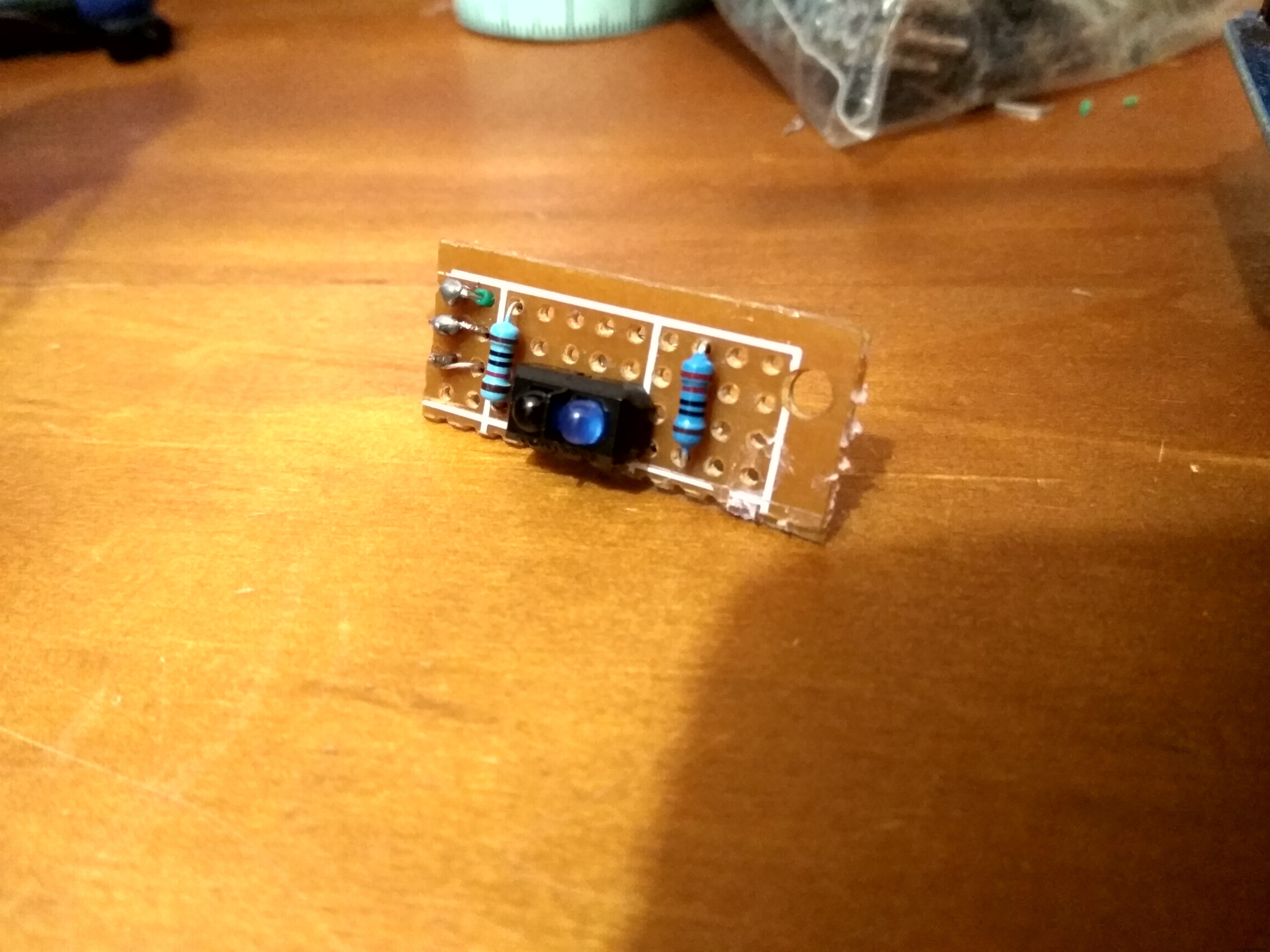

These are tachometers. I didn't use them in the final version, but they are still there.
A tachometer like this is made of two parts:a black and white paper on the main wheel and a reflective IR sensor in front of it. The reflected light depends on the color of the object. The difference is very big so distinguishing the states is very easy and thus you can easily calculate the speed of rotation. The only problem of this setup is the low sample rate in case of slow movement, however they work quite well on higher speeds.
The tachometers worked great, but I realized that I don't need them for the project and I also needed the GPIO pins on the Arduino for other purposes. This is their story.
Conclusion
The end result is great, useful and fun! It is also a good platform for other future projects. With hard work I managed to make the voice control work and Walabot proved to be a great sensor for this purpose, too. I see numerous ways to improve this tank so it is likely that you'll see more about it in the future!
This is my best and most successful project so far. And also the longest. To keep it from getting even longer I'd like to thank for all the help that I got and I also thank you for reading! As a prize here's a picture about a strange dog:

Code
Codes for the Arduino and Raspberry Pi
This repository contains the codes that are running on the MKR1000 and the Raspberry Pi 3 Bhttps://github.com/abysmalsb/Beer-TankSchémas
If I couldn't find a part then I replaced it with something similar. See notes for more info. Walabot is connected to the Raspberry Pi with and USB cable.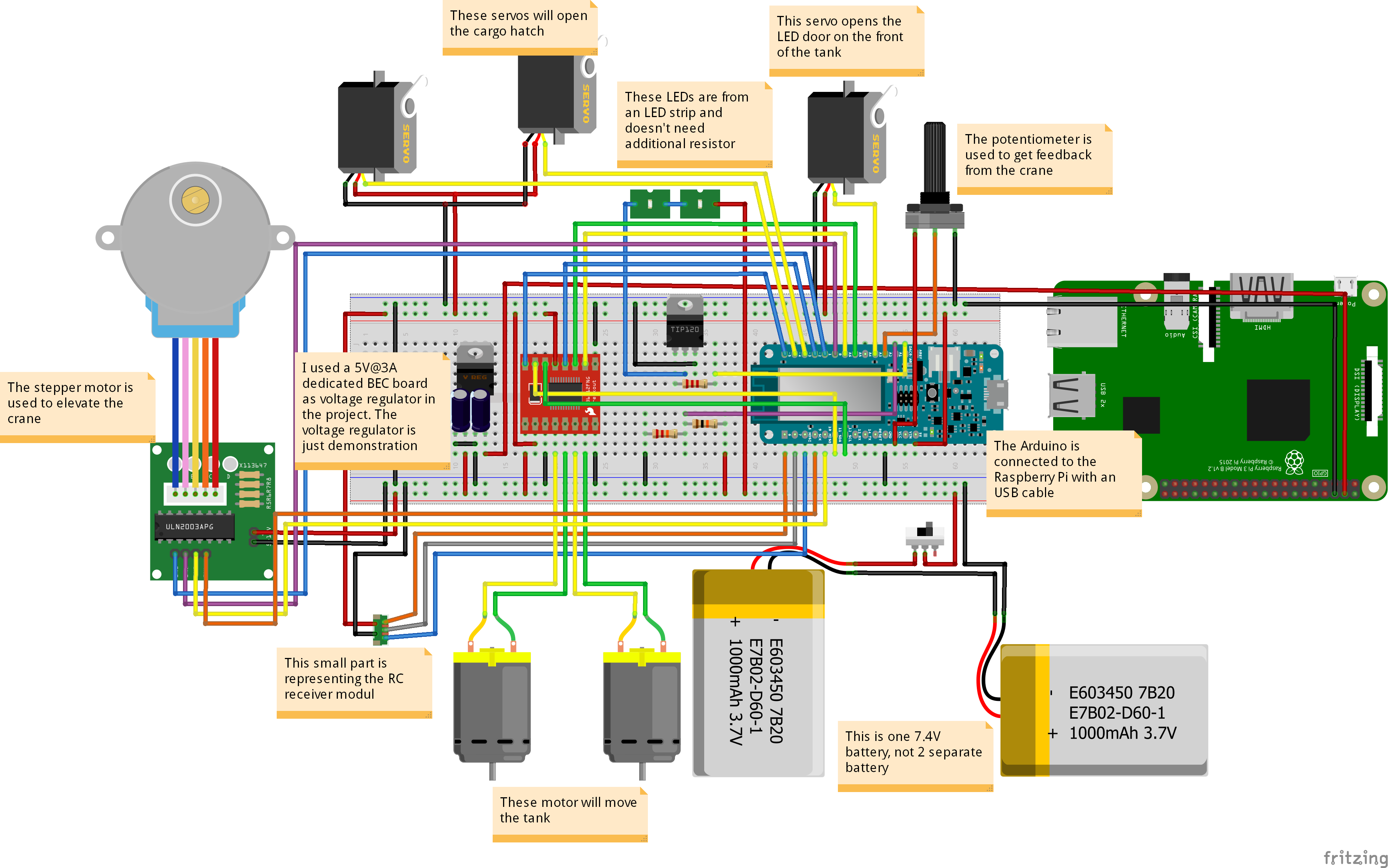 If I couldn't find a part then I replaced it with something similar. See notes for more info. Walabot is connected to the Raspberry Pi with and USB cable. beer_tank_YN88vVuS9b.fzz
If I couldn't find a part then I replaced it with something similar. See notes for more info. Walabot is connected to the Raspberry Pi with and USB cable. beer_tank_YN88vVuS9b.fzzProcessus de fabrication