


Transmission de données laser sans fil (LIFI) (100b/seconde)
Composants et fournitures
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 30 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 |
Outils et machines nécessaires
 |
| |||
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
Ce projet est composé de deux parties l'émetteur et le récepteur, il peut être utilisé pour envoyer des textes par laser à l'aide d'un clavier et d'un écran LCD
Code
- Code émetteur LI-FI V 2.0
- Code récepteur LI-FI V 2.0
Li-FI Transmitter Code V 2.0C/C++
Code de l'émetteur LI-FI V 2.0Code récepteur LI-FI V 2.0C/C++
LI-FI Receiver Code V 2.0/*LI-FI Receiver Code V 2.0 Écrit par HOUALEF AHMED RAMZI Commencé le 29-9-2020 Dernière mise à jour le 14-10-2020*/#include#define SolarCell A0 //Pour définir la broche d'entrée du solarcellint StCursor =0; // Pour contrôler l'écran lcd Cursorint A[] ={1, 1, 1, 1, 0}, B[] ={0, 0, 0, 1, 0}, C[] ={0, 0, 0, 1, 1}, D[] ={0, 0, 1, 0, 0}, E[] ={0, 0, 1, 0, 1}, F[] ={0, 0, 1, 1, 0}, G[] ={0, 0, 1, 1, 1}, H[] ={0, 1, 0, 0, 0};int I[] ={0, 1, 0, 0, 1 }, J[] ={0, 1, 0, 1, 0}, K[] ={0, 1, 0, 1, 1}, L[] ={0, 1, 1, 0, 0}, M[] ={0, 1, 1, 0, 1}, N[] ={0, 1, 1, 1, 0}, O[] ={0, 1, 1, 1, 1}, P[ ] ={1, 0, 0, 0, 0};int Q[] ={1, 0, 0, 0, 1}, R[] ={1, 0, 0, 1, 0}, S[] ={1, 0, 0, 1, 1}, T[] ={1, 0, 1, 0, 0}, U[] ={1, 0, 1, 0, 1}, V[] ={ 1, 0, 1, 1, 0}, W[] ={1, 0, 1, 1, 1}, X[] ={1, 1, 0, 0, 0};int Y[] ={1 , 1, 0, 0, 1}, Z[] ={1, 1, 0, 1, 0}, SPACE[] ={1, 1, 1, 1, 1};const int rs =12, en =11, d4 =5, d5 =4, d6 =3, d7 =2;int Cell_Input; // L'entrée du seuil de la cellule solaire;int info[5]; //Le DATALiquidCrystal lcd(rs, en, d4, d5, d6, d7);void setup() { pinMode(A0, INPUT); Serial.begin(9600); lcd.begin (16, 2); lcd.setCursor(0, 0); Seuil =lecture analogique (Cellule solaire) + 10 ; lcd.print("PRÊT À RECEVOIR"); retard (5000); lcd.clear();}void BufferClear() { // L'effacement du tampon pour (int i =0; i <5; i++) { info[i] =0; }}void check_condition(int receive_bits[5], int Binaryalpha[5], char Lcdalpha) {//Pour comparer les bits reçus Avec la base de données if (received_bits[0] ==Binaryalpha[0] &&receive_bits[1] ==Binaryalpha[1] &&receive_bits[2] ==Binaryalpha[2] &&receive_bits[3] ==Binaryalpha[3] &&receive_bits[4] ==Binaryalpha[4]) { lcd.print(Lcdalpha); CursorControler(); }}void CursorControler() { // Pour contrôler le curseur StCursor++; if (StCursor ==16) lcd.setCursor(0, 1);}void loop() { Cell_Input =analogRead(SolarCell); if (Cell_Input> Threshold) { // le délai de détection du bit de départ (10) ; // timing pour (int i =0; i <5; i++) { // enregistrer les données if (analogRead(SolarCell)> Threshold) { info[i] =1; } else { info[i] =0; } délai(10) ; } check_condition(info, A, 'A'); check_condition(info, B, 'B'); check_condition(info, C, 'C'); check_condition(info, D, 'D'); check_condition(info, E, 'E'); check_condition(info, F, 'F'); check_condition(info, G, 'G'); check_condition(info, H, 'H'); check_condition(info, je, 'je'); check_condition(info, J, 'J'); check_condition(info, K, 'K'); check_condition(info, L, 'L'); check_condition(info, M, 'M'); check_condition(info, N, 'N'); check_condition(info, O, 'O'); check_condition(info, P, 'P'); check_condition(info, Q, 'Q'); check_condition(info, R, 'R'); check_condition(info, S, 'S'); check_condition(info, T, 'T'); check_condition(info, U, 'U'); check_condition(info, V, 'V'); check_condition(info, W, 'W'); check_condition(info, X, 'X'); check_condition(info, Y, 'Y'); check_condition(info, Z, 'Z'); check_condition(info, ESPACE, ' '); BufferClear(); }}
Schémas
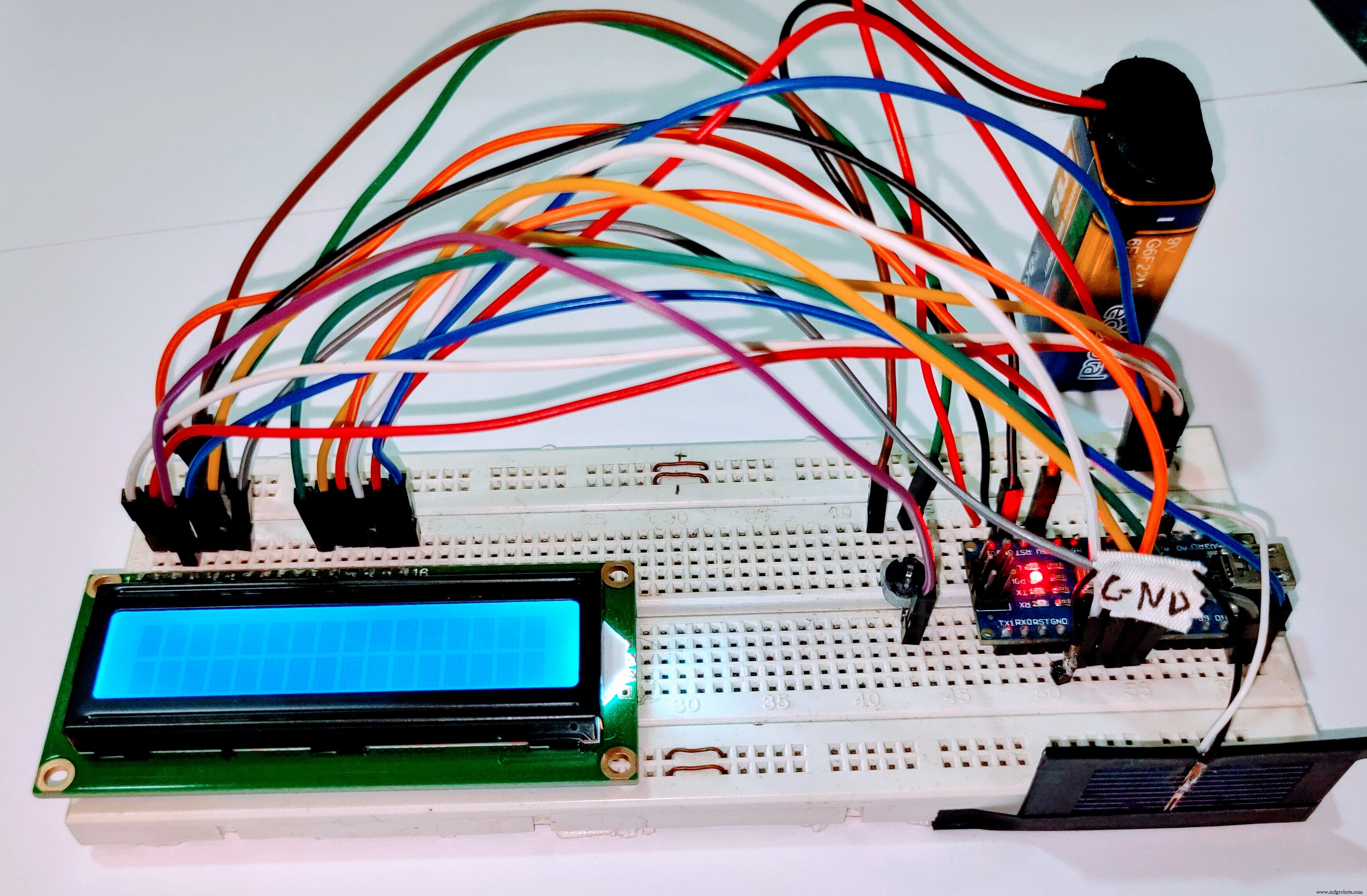
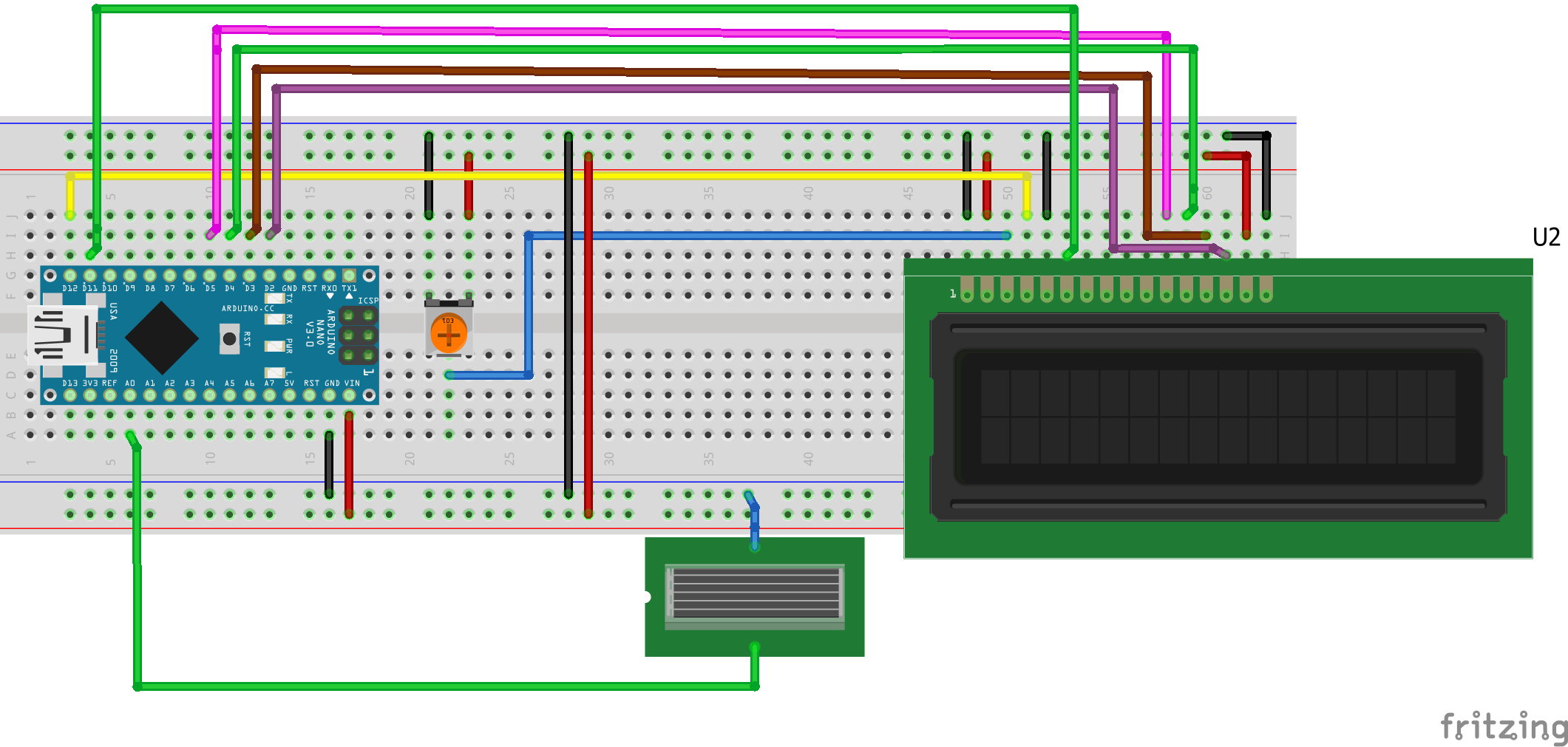
la cellule photo doit être placée face à face avec le laser pour recevoir les donnéesACL :
VSS ---> Terre
VDD ---> Arduino 5V
K ---> Terre
Un ---> Arduino 5V
RW ---> Terre
V0/VEE ---> Le Vout du potentiomètre
RS ---> broche numérique Arduino 12
FR ---> broche numérique Arduino 11
D4 ---> broche numérique Arduino 5
D5 ---> broche numérique Arduino 4
D6 ---> broche numérique Arduino 3
D7 ---> broche numérique Arduino 2
Cellule photovoltaïque:
Le fil négatif du SC est connecté à la terre
Le fil positif du SC est connecté à la broche analogique Arduino A0
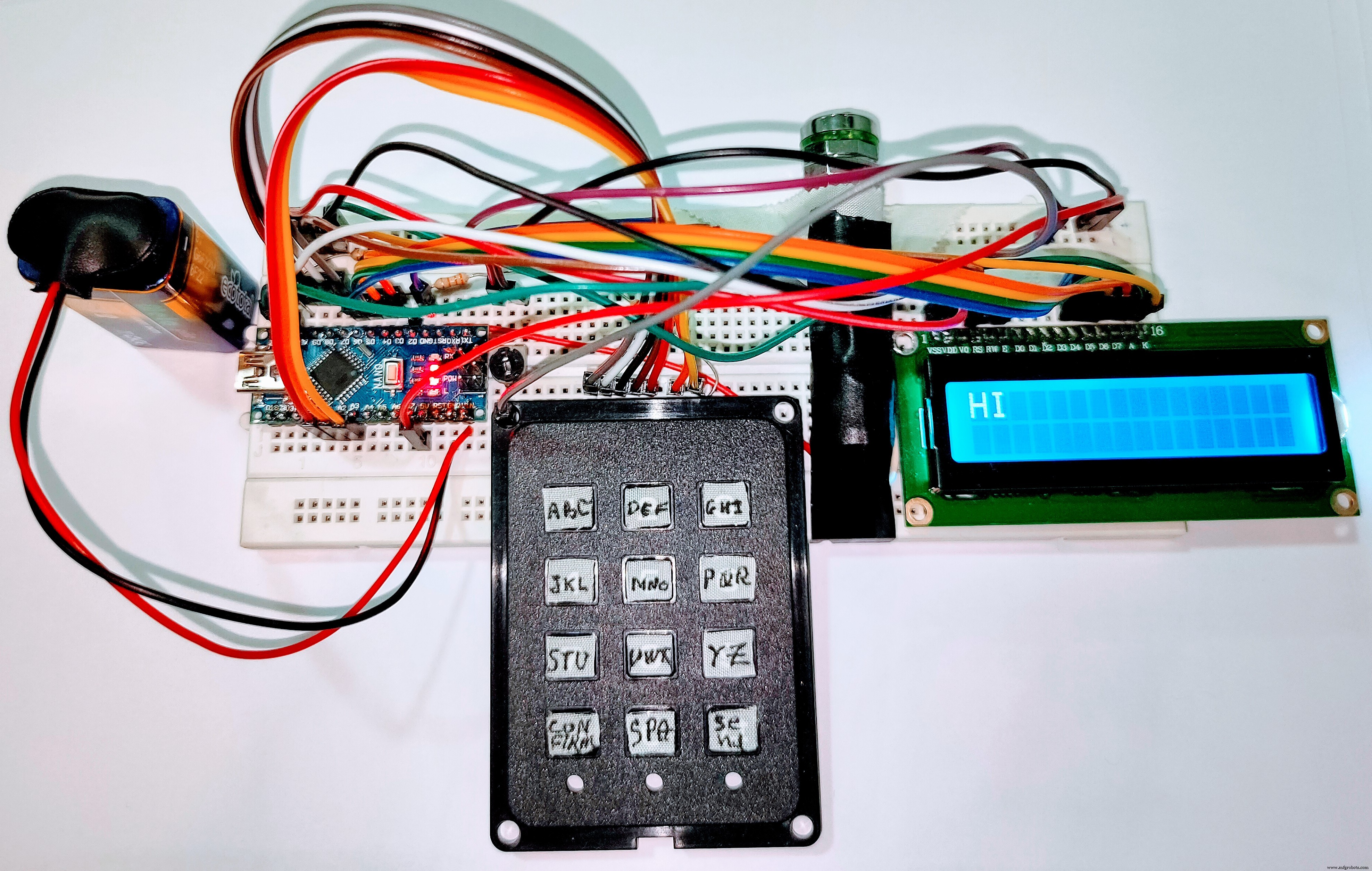
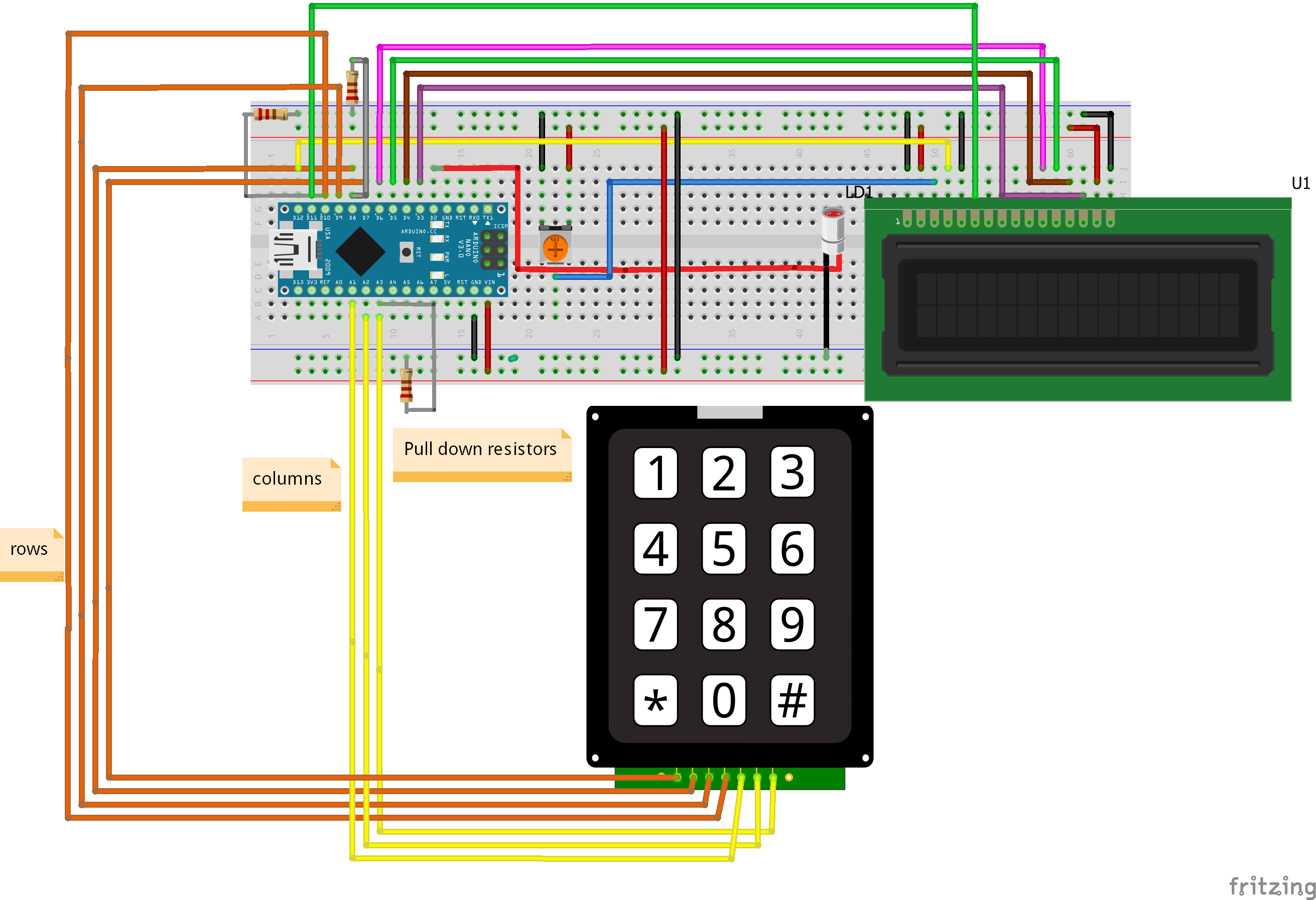
 l'utilisateur doit choisir ce qu'il veut envoyer à l'aide du clavier et de l'écran LCD, après avoir tapé chaque lettre, vous devez appuyer sur le bouton de confirmation et éventuellement appuyer sur le bouton d'envoi.
l'utilisateur doit choisir ce qu'il veut envoyer à l'aide du clavier et de l'écran LCD, après avoir tapé chaque lettre, vous devez appuyer sur le bouton de confirmation et éventuellement appuyer sur le bouton d'envoi. ACL :
VSS ---> Terre
VDD ---> Arduino 5V
K ---> Terre
Un ---> Arduino 5V
RW ---> Terre
V0/VEE ---> Le Vout du potentiomètre
RS ---> broche numérique Arduino 12
FR ---> broche numérique Arduino 11
D4 ---> broche numérique Arduino 6
D5 ---> broche numérique Arduino 5
D6 ---> broche numérique Arduino 4
D7 ---> broche numérique Arduino 3
CLAVIER:
A ---> broche analogique Arduino A2 // toutes les broches analogiques sont utilisées comme broches numériques
B ---> broche analogique Arduino A1
C ---> broche numérique Arduino 9
D ---> broche numérique Arduino 7
1 ---> broche numérique Arduino 8
2---> broche numérique Arduino 10
3---> Broche analogique Arduino A3
RÉSISTANCES DE TRACTION :
la première extrémité de la résistance est connectée à la broche numérique 8 et la 2ème à la terre
la première extrémité de la résistance est connectée à la broche numérique 10 et la 2ème à la terre
la première extrémité de la résistance est connectée à la broche analogique A3 et la 2ème à la terre
DIODE LASER:
La cathode du LD est reliée à la terre
L'anode du LD est connectée à la broche numérique Arduino 2
Processus de fabrication
- Guide du marquage laser sur aluminium
- Guide du marquage laser
- Qu'est-ce que le marquage laser à fibre ?
- Pointeur laser
- Laser à semi-conducteur
- Laser à semi-conducteurs
- Lecteur DVD
- Le nouveau laser électro-optique émet 30 milliards d'impulsions par seconde
- La nouvelle fibre optique la plus rapide transmet 1 pétabit/seconde