


Robot humanoïde artisanal avancé Open Source MIA-1 !
Composants et fournitures
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Salut tout le monde, aujourd'hui je vais montrer comment j'ai fait le robot MIA-1, qui est non seulement avancé et unique mais aussi open source et peut être fait sans impression 3D ! Oui, vous l'avez compris, ce robot est entièrement fait à la main. Et open source signifie - vous obtenez les codes et tous les détails gratuitement , vous aussi pouvez faire ce robot si vous le souhaitez.
Ici, nous ne voyons que son discours, mais elle peut faire bien d'autres choses !
Voici les choses qu'elle peut faire :
- Peut vous écouter et vous répondre
- Peut vous voir et vous reconnaître à l'aide de la caméra de son œil gauche
- Peut détecter un mouvement et capturer une photo
- A une interface graphique avec écran LCD tactile pour la commander
- Affiche des images sur son écran LCD
- Télécharger des images et des émissions sur son écran
- Peut cibler des objets à l'aide d'un pointeur laser sur sa main droite
- Déplace les mains tout en parlant
- Se tient debout sans l'aide des autres
- Elle peut aussi s'incliner (regardez la vidéo)
- Et bien d'autres !
Fournitures :
Pour fabriquer ce robot, j'ai utilisé tout ce qui est disponible dans notre magasin local.
Microcontrôleurs + Ordinateurs (Le Cerveau) :
- Arduino Mega (pour contrôler les servomoteurs)
- Un ordinateur complet (vous pouvez utiliser Raspberry Pi, mais j'ai d'abord utilisé mon ordinateur portable comme son cerveau)
Servomoteurs :
MIA-1 a 13 degrés de liberté.
- Servomoteurs à double axe LDX227 8x
- Servomoteurs MG996r / MG996 3x
- Pour les chiffres, j'ai utilisé le micro servo sg90
Notez que j'ai ajouté une griffe robotique et qu'elle utilise un autre servomoteur MG996r.
Et des fils de liaison et etc.
Vision :
Pour le traitement d'images tel que prendre des photos et détecter des visages, etc. J'ai utilisé une caméra USB .
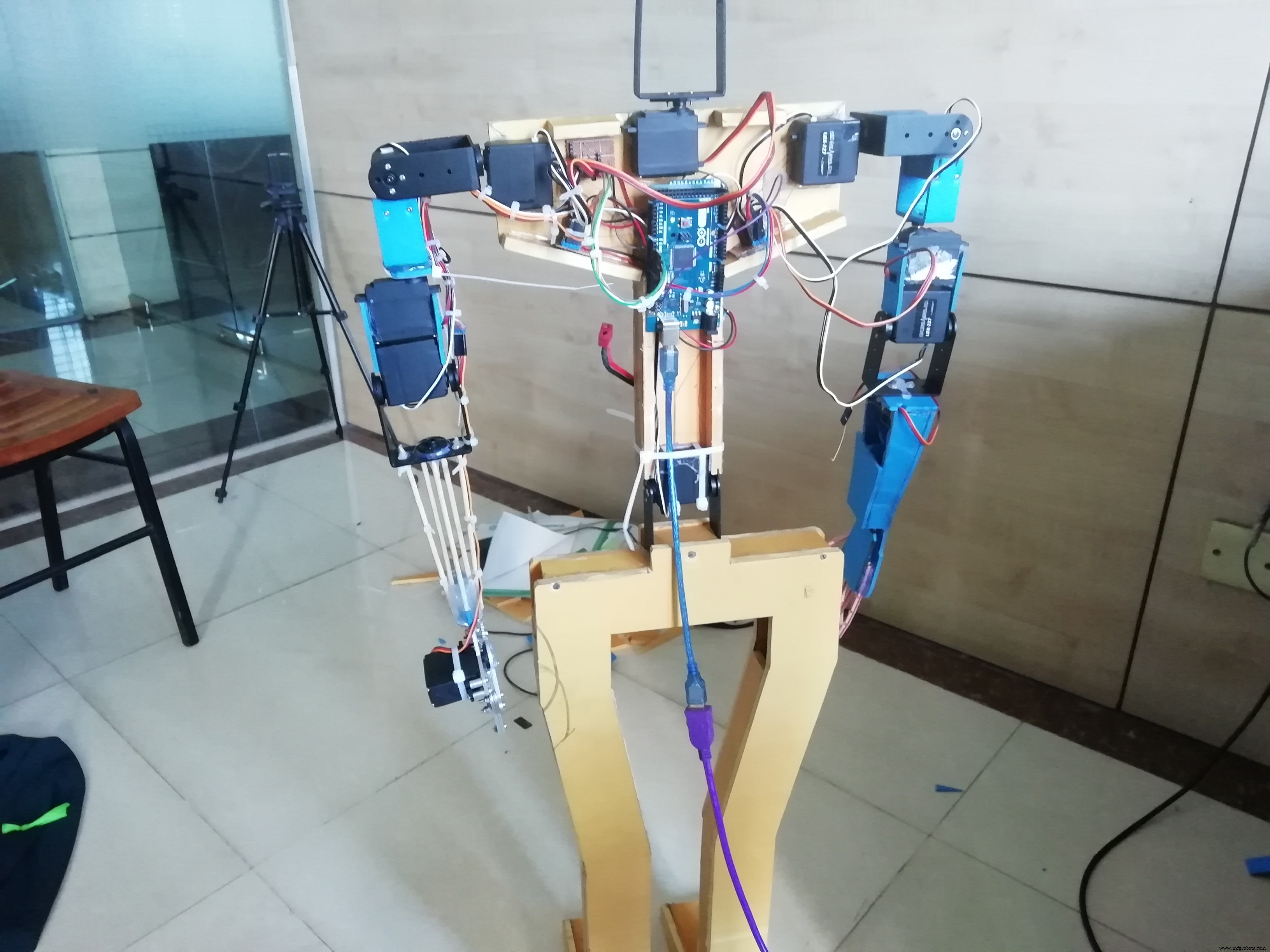
Étape 1 :Disposition du corps et du moteur
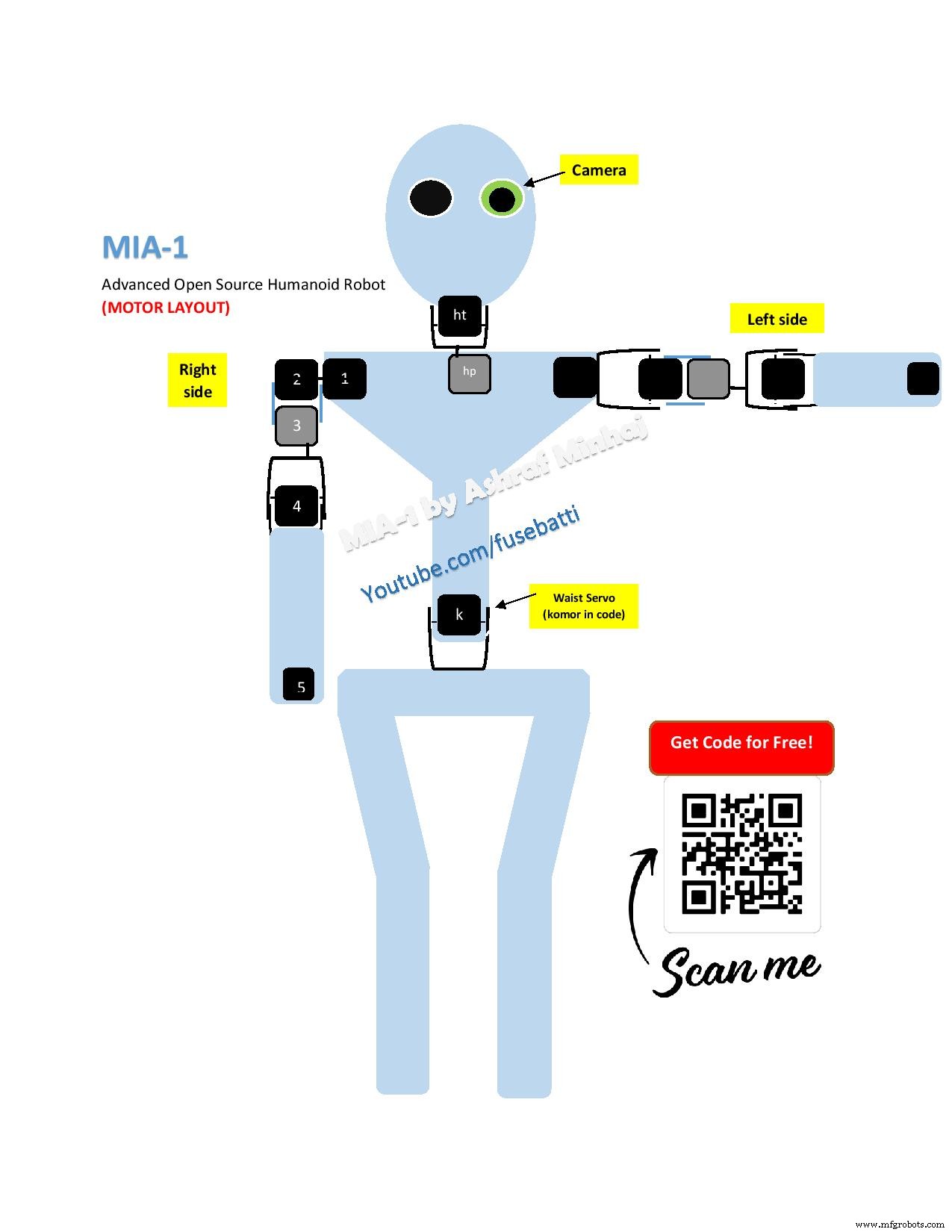

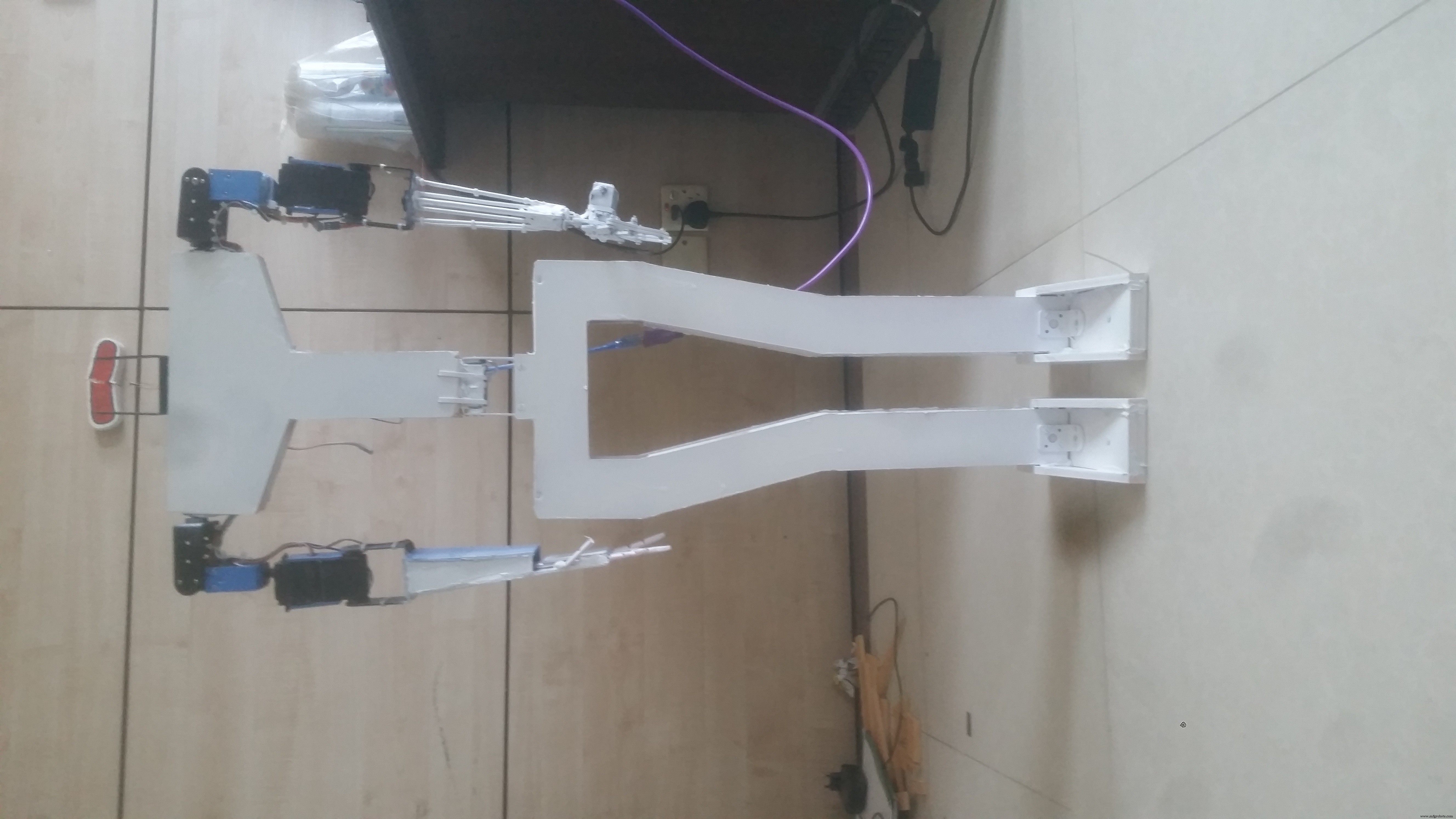
Le corps est fabriqué à partir de feuille de PVC, différentes pièces sont attachées à l'aide de colle chaude et vis (voir l'image). J'ai coupé la feuille de pvc à l'aide d'un cutter (faites très attention !! ne vous coupez pas les doigts à la place !!). À partir des images un et deux, vous pouvez voir la disposition des servos. Comme je faisais un robot fille, je lui ai donné une forme et une silhouette féminines.
Les connecteurs des servos sont fabriqués à partir de fines feuilles de PVC car ils se plient bien.
La tête est faite à l'aide d'un ballon, insufflé de l'air dans le ballon (voir photo), ajouté de petits morceaux de papiers humides puis séché. Après avoir ajouté 8 couches, il est devenu solide et durable.
Ensuite, il suffit de le colorer en blanc (corps entier) à l'aide d'un spray de couleur.
Il s'est avéré que le design est incroyablement équilibré et qu'elle (MIA-1) se tient juste sur deux pieds d'elle !
Ajout de l'affichage :
Après cela, j'ai juste utilisé des vis et de la colle chaude pour monter l'écran LCD sur sa poitrine (dernière photo).
Étape 2 : Schéma de circuit
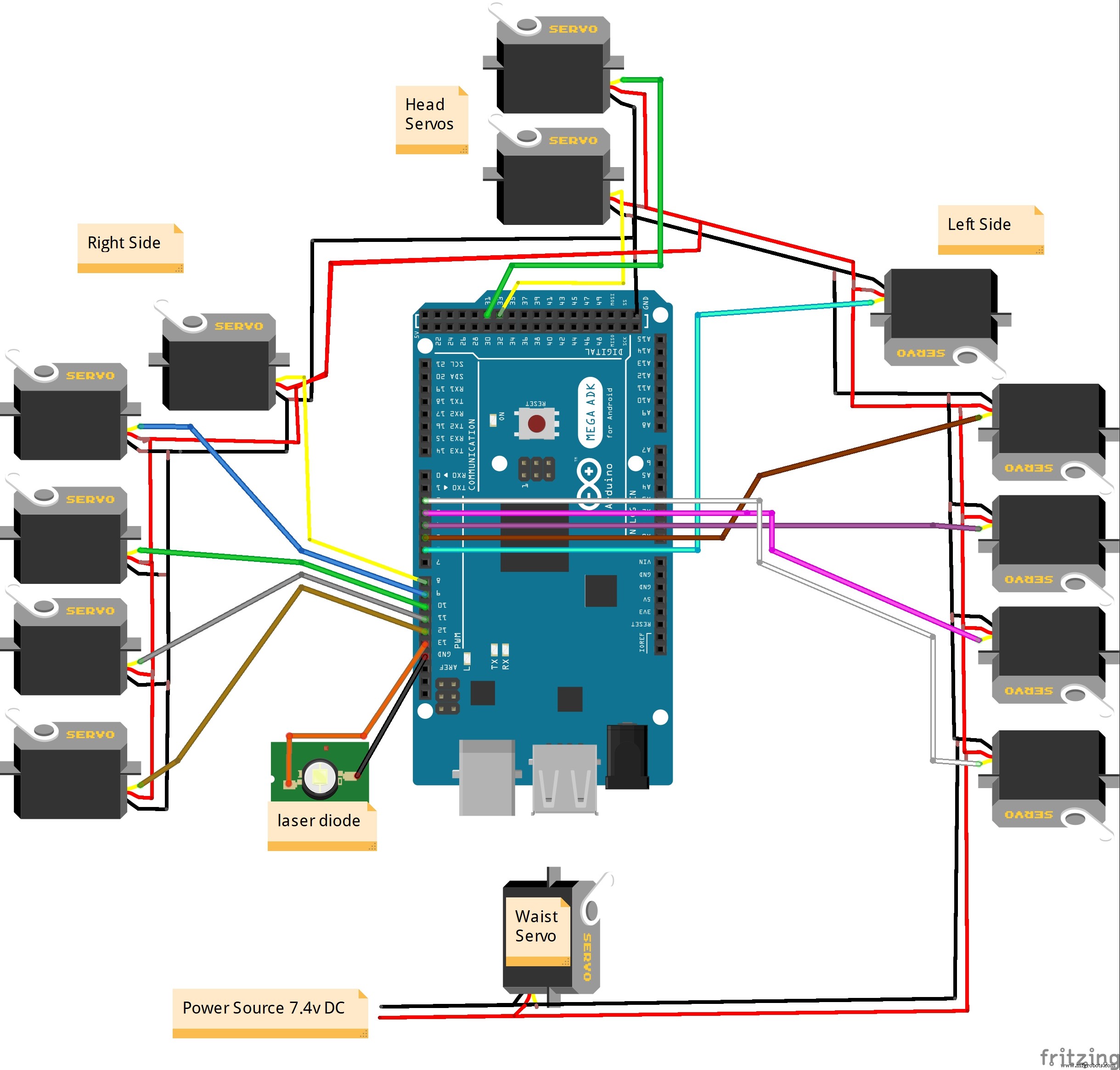
Le schéma de circuit semble complexe mais il ne l'est pas. J'ai dessiné le circuit comme la disposition du moteur sur le corps afin que vous puissiez le comprendre plus facilement. Assurez-vous d'avoir un terrain d'entente. L'arduino est alimenté par l'ordinateur via son câble USB. Il y a une diode laser qui permet à mia de cibler des choses qui sont alimentées par la broche 13 (broche led) d'arduino.
Comme vous pouvez le voir, tous les moteurs et l'arduino lui-même se trouvent à l'arrière du corps. J'ai aussi mis tous les câbles à l'arrière. J'ai acheté un câble USB étendu pour pouvoir le connecter à l'ordinateur.
Étape 3 :Le CODE
Comme vous le savez, j'ai utilisé un méga arduino. L'arduino mega contrôle les servomoteurs, les moteurs sont préprogrammés. Obtenez le code des moteurs d'ici. Veuillez noter les positions des servos par défaut, tout en construisant le robot, conservez-les. Alimentez simplement les moteurs avec arduino sans fabriquer le corps et les servomoteurs atteindront la position par défaut (pos par défaut ci-dessous)
/*default/standby position of servos*/
komor.write(4) ; #waist servo
left1.write(120);
rFinger.write(0);
servo1.write(55);
clawOpen();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90); Le code de commande du moteur est de plus de 750 lignes (attention lors de l'édition).
Le traitement principal est effectué à l'aide d'un script python3.
Python a une bibliothèque pySerial qui communique avec l'arduino via série. Attention au 'COM PORT'.
#Connectez-vous avec la carte de commande de moteur mia via une communication série
essayez :
mia =serial.Serial("COM28", 9600)
sauf :
pass Vous devez également installer ces bibliothèques par pip
"""importer les bibliothèques nécessaires"""
#import request #for faire des requêtes post/get
import pyttsx3 #offline text to speech
import speech_recognition as sr #Speech to texte (nécessite Internet pour fonctionner)
heure d'importation
depuis l'import aléatoire randint #bibliothèque de sélection d'entiers aléatoires
import tkinter #tkinter gui library
depuis tkinter import Tk, Button, Label, Tk #importer les choses nécessaires
importer la bibliothèque série #serial pour la communication série via USB
depuis PIL importer l'image #pour afficher l'image
importer cv2 #Bibliothèque Computer Vision
importer wikipedia #pour obtenir des données directement depuis wikipedia Tout est facile en utilisant pip install. Pour opencv tapez dans l'invite de commande :
pip install opencv-contrib-python L'interface utilisateur graphique (GUI) que vous voyez est développée à l'aide de tkinter. Pour cela et toutes les autres bibliothèques que vous pouvez installer par cette commande :
pip install library_name alors il sera installé.
Jetez également un œil si vous utilisez une webcam, il est plus probable que la caméra soit notée 1
cap =cv2.VideoCapture(1) #camera Et si vous voulez en savoir plus sur la façon dont ce robot répond réellement, veuillez lire ces tutoriels.
Le code de MIA-1 n'en est qu'une version étendue.
Au moment de commander l'arduino, l'ordinateur envoie une morsure, l'arduino agit en fonction des morsures qu'il reçoit, ainsi il regarde le mouvement de Mia et la conversation est asynchrone.
mia.write(b'p') #commande pour monter puis descendre
count_down(3)
respond("Smile please", 100) Maintenant, pour obtenir le code, cliquez sur le lien ci-dessous.
Téléchargez le code de MIA-1 à partir d'ici.
Étape 4 :Alimentation et finition
J'ai alimenté le robot à l'aide d'une batterie lipo de 7,4 V. Les servos LDX227 sont très gourmands en énergie (mais sont de bonne qualité), alors assurez-vous qu'ils obtiennent au moins 7,3 v à tout moment. D'un autre côté, les servomoteurs MG996r sont bon marché et peuvent être facilement endommagés, assurez-vous qu'ils ne dépassent pas 7,8V. Ainsi, l'alimentation électrique la plus élevée pour ce robot devrait se situer entre 7,4 et 7,8 volts.
Bonne fabrication ! Si vous aimez ce robot, assurez-vous de soutenir en vous abonnant à la chaîne pour des projets plus étonnants.
Code
Télécharger le code complet gratuitement
ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robothttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotSchémas
Circuit MIA-1
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotProcessus de fabrication
- Servomoteurs avancés transformant l'impression 3D sur métal
- Un journal de projet pour FirePick Delta, la MicroFactory Open Source
- Article :Meet OAP — un projet de conception de référence de robot ouvert
- Intellisaurus – Kit Robot Dinosaure
- Open CV Robot
- Robot Pi simple
- AT&T et Tech Mahindra collaborent sur une nouvelle plateforme d'IA open source
- Risques logiciels :sécurisation de l'open source dans l'IoT
- Outils de développement IoT Open Source par rapport aux outils pris en charge par les fournisseurs