


Conception de circuit de module d'alimentation Flyback pour lecteur RFID
La technologie d'alimentation à découpage a connu une évolution vers la miniature, la haute fréquence et le haut rendement avec le développement de puces hautement intégrées ces dernières années. Les puces de contrôle hautement intégrées simplifient les composants périphériques requis car il est relativement facile de concevoir une alimentation à découpage en fonction du logiciel de conception. Cependant, le problème d'une intégration élevée entraîne une faible liberté de conception, une faible disponibilité des puces et un faible prix. Les logiciels de conception développés par chaque fabricant sont juste capables de simuler certains types de puces particulières. Dans l'application pratique, il est crucial de concevoir une alimentation à découpage compatible avec les exigences du produit avec d'excellentes conditions de fonctionnement. Basé sur l'exigence d'un module d'alimentation pour RFID, un interrupteur d'alimentation est conçu avec une tension de 220VAC à 0,5VDC et une dimension de 88mm x 70mm. Étant donné que le courant de fonctionnement est proche de 1,5 A lors du processus de lecture des étiquettes, le courant de sortie maximal de l'alimentation de commutation conçue est défini sur 3 A.
Dans la conception d'une miniature avec une puissance de sortie relativement faible, selon la théorie d'Erickson R W, la disponibilité du commutateur d'alimentation de la puissance du commutateur flyback qui est de 0,385 est supérieure à 0,353 qui utilise le type de choc normal, pont complet et demi-pont. Par conséquent, la structure du convertisseur flyback est captée. En tenant compte des avantages de la conception de la rétroaction et du contrôleur en mode courant, la puce de contrôle PWM en mode courant UC3842 est captée.
Dans la puissance de commutation appliquant la puce UC3842, la conception de circuits périphériques est relativement facile. La structure de la puce de contrôle PWM en mode courant élimine le double pôle apporté par l'inductance dans la boucle afin de simplifier efficacement la conception de la boucle de rétroaction. Le style de rétroaction de la borne de sortie est appliqué et consiste en un tube stabilovolt TL431 et un optocoupleur. Dans la conception basée sur UC3842, les concepteurs ont tendance à concevoir indépendamment chaque module dans la structure flyback, en mettant l'accent sur la conception du circuit adjacent et du circuit de rétroaction, en négligeant la conception des autres circuits. Par exemple, selon le théorème des éléments supplémentaires du Dr Middlebrook, l'impédance d'entrée du filtre d'entrée doit être bien inférieure à l'impédance d'entrée du convertisseur. Sinon, une fluctuation se produit éventuellement dans le circuit. Cette conception traite soigneusement de la conception des circuits adjacents tels que la conception du circuit du filtre d'entrée, la compensation de pente et la conception du circuit de masse. Le schéma de conception est déterminé par la simulation Sabre et sa compatibilité avec les exigences et la stabilité grâce au débogage avec RFID.
Théorie de base de la puissance du commutateur Flyback
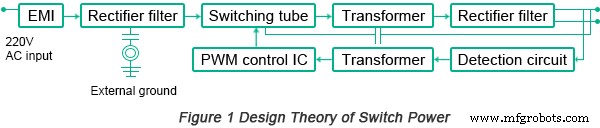
La théorie de conception de base de l'alimentation de commutation consiste à transformer VAC en VDC pour l'alimentation de la puce IC en changeant DC en HFAC qui se transforme ensuite en sortie DC. La rétroaction stabilise la tension de sortie de l'échantillon CC de sortie et du commutateur de commande IC d'entrée. La théorie de la puissance de commutation est illustrée à la figure 1.
La structure à double boucle fermée en mode courant est appliquée dans le convertisseur de commande de la puissance du commutateur flyback. La caractéristique du convertisseur flyback réside dans le fait qu'à l'état fermé du tube de commutation, l'énergie d'inductance à l'intérieur des bobines d'un côté du transformateur fournit de l'énergie au porteur via la diode redresseuse tandis qu'à l'état ouvert du tube de commutation, l'énergie est stockée à l'intérieur la bobine du transformateur et la sortie sont fournies par l'énergie stockée à l'intérieur du condensateur de sortie. Le schéma de principe du convertisseur flyback est illustré à la figure 2.
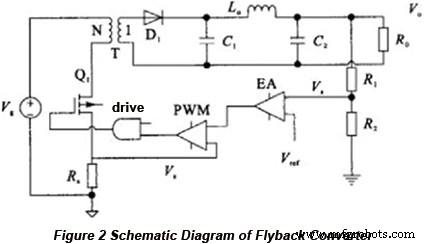
Lorsque la tension détectée par les résistances de détection de sortie R1 et R2 est inférieur à la tension de référence Vref , l'erreur augmente à travers l'amplificateur d'erreur avec le tube de commutation Q1 ouvert. L'inductance primaire et le courant du transformateur augmentent selon la pente de (Vg - Vactivé )/ Lm . Résistance d'échantillonnage Rs change l'inductance primaire et le courant en tension d'échantillonnage. Basé sur la comparaison entre la tension d'échantillonnage sur la résistance d'échantillonnage Rs et la tension d'erreur, lorsque la tension sur la résistance d'échantillonnage Rs monte à la valeur supérieure à la tension d'erreur, le niveau bas sera émis et le tube de commutation est fermé jusqu'à l'arrivée de la prochaine horloge. La puissance de commutation Flyback n'a pas besoin d'inductance de puissance de sortie et l'inductance du transformateur peut être directement appliquée pour une puissance présentant une structure topologique simple. Le circuit de contrôle dépend principalement de la puce PWM en mode courant UC3842 et du circuit périphérique.
Puce PWM en mode courant UC3842
Le processeur de contrôle appliqué dans cette conception est la puce PWM UC3842 en mode fréquence et courant fixes, intégrant des composants de contrôle cruciaux tels que l'oscillateur, l'amplificateur d'erreur, le comparateur PWM et le déclencheur SR. Cette puce présente la fonctionnalité de protection contre les sous-tensions et les surintensités avec un mode de sortie de totem, une fréquence de travail de 500 kHz, un courant de démarrage inférieur à 1 mA et un courant de sortie maximal de 1 A.
Les fonctions des broches sont différentes les unes des autres. La broche 7 est pour l'alimentation. Lorsque la tension est supérieure au seuil de démarrage lent de 16 V, le déclencheur de Schmitt produit un niveau élevé. Le régulateur de tension fournit une tension de référence de 5 V à la broche 8 et lorsque la tension est inférieure à 10 V, le déclencheur de Schmitt produit un niveau bas avec une sous-tension verrouillée. Le tube stabilisateur interne limite la tension d'entrée maximale à moins de 36V. L'alimentation est fournie à Ct par la broche 4 via le circuit RC externe et par la broche 8 via la résistance Rt et Ct détermine la fréquence de l'oscillateur via une source de courant interne générant de l'électricité. La broche 2 est l'entrée inverseuse de l'amplificateur d'erreur tandis que la broche 1 est la sortie de l'amplificateur d'erreur pour fournir une compensation. La broche 3 est la broche de détection de courant, déterminant le rapport cyclique via la sortie de l'amplificateur d'erreur et lorsque la tension de la broche 3 est supérieure à 1 V, le flux de courant est fermé. La broche 6 fournit une sortie en mode mât totémique avec le courant de travail maximum de 1A, accélérant la fermeture du tube de commutation.
Conception du contrôle de l'alimentation du commutateur Flyback
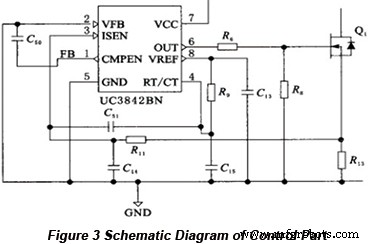
Le diagramme schématique de la partie commande est affiché dans la figure 3 ci-dessous. La partie contrôle du convertisseur flyback est principalement intégrée à l'intérieur de la puce UC3842 et seuls quelques composants externes peuvent implémenter la fonction de contrôle requise. Le module de fonction de contrôle principal comprend le circuit de démarrage, la conception de fréquence, le circuit de protection, le circuit de commande et la compensation de pente.
• Conception du circuit de démarrage et de la fréquence
Le circuit de démarrage fournit à la broche 7 une tension de démarrage supérieure à 16 V. Lorsque le système démarre, l'alimentation est fournie à la broche 7 par l'enroulement auxiliaire. La fréquence de fonctionnement de ce système est déterminée par le condensateur de synchronisation et la résistance entre la broche 8 et la broche 4. La tension de référence de 5 V de la broche 8 alimente le condensateur C15 à travers la résistance R9 . Condensateur C15 génère ensuite une onde en dents de scie à travers une source de courant interne générant de l'électricité dont la durée détermine le temps mort de la puce produisant PWM. Afin de garantir les performances, le temps mort doit être inférieur à la période d'oscillation de 5 %. Sur la base du diagramme de séquence temporelle, on peut obtenir que C15 est de 3,3 nF et la fréquence de travail de 47 kHz. Conformément à la formule fosc =1,7/( Rréf x C15 ), la valeur de R9 est de 11 kHz.
• Circuit de repli de courant
Le circuit de repli de courant de la puce transforme le courant d'inductance au niveau du bord primaire en tension de sortie de l'amplificateur de tension et d'erreur mis en œuvre par le comparateur PWM via une résistance de détection de surintensité. Lorsque la tension de la broche 3 est supérieure à 1 V, la sortie tombe en panne. Le courant de crête de l'inductance est censé être de 1 A et la valeur de la résistance de détection de courant R13 est censé être 1Ω. Afin d'éviter l'arrêt d'erreur conduit par le pic de courant d'inductance du front primaire du transformateur, R11 et C14 sont accessibles pour filtrer le pic et le courant de crête est d'environ des centaines de nanosecondes. Dans la condition où R11 est supposé être 1k et C14 500pF, constante de temps τ =RC =500ns.
• Circuit de commande du tube MOS
Le circuit de commande du tube MOS est responsable de l'excellente forme d'onde du PWM, en particulier du front de chute. La connexion série entre la broche de sortie 6 et la résistance série de grille R6 diminuera la fluctuation parasite à haute fréquence causée par la capacité d'entrée du tube MOS et toute inductance de conducteur série dans le circuit. Afin d'assurer la forme d'onde PWM du commutateur de tube MOS, la valeur de R6 est toujours petit dans la gamme des dizaines à la vingtaine d'ohms. La valeur de R8 est censé être de 15kΩ en tant que résistance de purge de grille de tube MOS.
• Compensation de pente
Dans le contrôle du mode de courant de crête, la valeur de crête du courant d'inductance est constamment définie alors que la valeur moyenne du courant d'inductance ne l'est pas. Le changement de rapport cyclique modifiera le courant moyen et l'anneau intérieur du contrôle du courant de crête assure la valeur de crête du courant d'inductance mais ne parvient pas à contrôler la valeur moyenne du courant d'inductance correcte compatible avec la tension de sortie, ce qui entraîne un changement constant de la tension de sortie. Lorsque le rapport cyclique est supérieur à 50 %, la fluctuation du courant de l'inducteur génère une oscillation. Dans cette conception, une compensation de pente est nécessaire. L'application de la compensation de pente supérieure fait référence à une pile de tension de pente positive sur les signaux d'échantillon de courant. La compensation capacitive est appliquée dans cette conception avec un C51 de 100pF ajouté entre la broche 3 et la broche 4 et le signal d'oscillation de l'oscillateur alimente C51 et la broche 3 à travers le condensateur. Avec ce type de compensation de pente, la capacité est relativement faible avec un rang de pF pour éviter d'attirer le courant de l'oscillateur et de générer une tension négative trop importante sur la broche 3.
Conception du circuit périphérique de l'alimentation du commutateur Flyback
• Conception de circuits pour filtre EMI et redresseur
Afin de filtrer les interférences du réseau électrique haute fréquence sur les appareils et l'influence du commutateur haute fréquence sur le réseau électrique, le circuit de filtre EMI doit être accessible par le rang d'entrée. Le schéma de circuit de l'onde de filtre EMI commune est illustré à la figure 4.
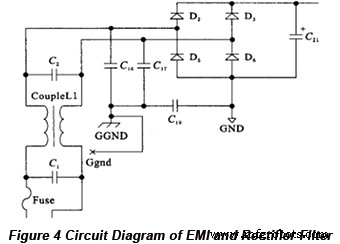
C1 est connecté au port d'entrée du réseau électrique tandis que C2 est avec le port d'entrée de l'appareil pour éliminer les interférences en mode différentiel. L partage la même direction avec la self de mode commun pour filtrer les interférences de mode commun tandis que C16 et C17 sont connectés à la terre pour filtrer les interférences de mode commun.
Le courant de fuite de C16 et C17 est calculé conformément à la formule : . Pour deux condensateurs identiques, l'amplitude du courant de fuite doit être conforme à la formule :
. Pour deux condensateurs identiques, l'amplitude du courant de fuite doit être conforme à la formule : , dans lequel f fait référence à la fréquence du réseau électrique avec la valeur de 50 Hz, C fait référence à la capacité globale de 4400pF au sol, et V se réfère à la tension au sol de 110V. Par conséquent, la valeur de Ifuite est de 0,15 mA compatible avec le courant alternatif avec la valeur valide de 220 VAC après compatibilité EMI avec la norme de sécurité. L'amplitude est
, dans lequel f fait référence à la fréquence du réseau électrique avec la valeur de 50 Hz, C fait référence à la capacité globale de 4400pF au sol, et V se réfère à la tension au sol de 110V. Par conséquent, la valeur de Ifuite est de 0,15 mA compatible avec le courant alternatif avec la valeur valide de 220 VAC après compatibilité EMI avec la norme de sécurité. L'amplitude est  alors que la sortie DCV est
alors que la sortie DCV est  . La tension de claquage inverse de la diode doit répondre à l'exigence suivante :
. La tension de claquage inverse de la diode doit répondre à l'exigence suivante : . C fait référence à la capacité du filtre tandis que RL fait référence à la charge. Plus la constante de temps RL est grande C est et plus la capacité est lisse, meilleur sera l'effet de filtre. La diode ln4007 à haute tension de tenue est captée.
. C fait référence à la capacité du filtre tandis que RL fait référence à la charge. Plus la constante de temps RL est grande C est et plus la capacité est lisse, meilleur sera l'effet de filtre. La diode ln4007 à haute tension de tenue est captée.
• Oscillation apportée par l'impédance de sortie du filtre et l'impédance d'entrée du convertisseur
L'incompatibilité entre l'impédance d'entrée du convertisseur et l'impédance de sortie du filtre peut également entraîner une oscillation. L'impédance d'entrée du convertisseur du système de boucle peut être considérée comme une résistance négative (  ). Le filtre est un filtre LC et la fonction de transfert peut être obtenue avec ESR d'inductance et de capacité.
). Le filtre est un filtre LC et la fonction de transfert peut être obtenue avec ESR d'inductance et de capacité.

L'impédance d'entrée du convertisseur d'oscillation constante du système doit être conforme à la formule : .
.
Par conséquent, seulement si l'impédance d'entrée du convertisseur de boucle est inférieure à l'impédance de sortie d'oscillation de filtre calculée, le coefficient d'amortissement de la fonction de transfert est une valeur positive qui deviendra stable afin de réduire l'oscillation. Sinon, le circuit fluctuera.
• Conception de circuit d'amortissement
Afin d'éviter que le tube de fréquence ne soit détruit à la suite d'une surtension de coupure, le circuit d'amortissement RCD du bord primaire doit être assemblé au transformateur. Le port de sortie décompose la diode de sortie pour éviter une panne grave avec l'ajout d'un circuit d'amortissement de sortie, illustré à la figure 5.
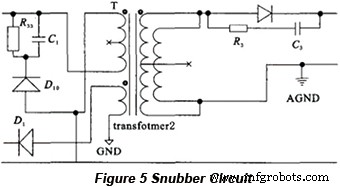
Dans le processus de panne du tube MOS, le courant du bord primaire id alimente la capacité de la source de fuite parasite par l'intermédiaire de la source de fuite du bord primaire du transformateur. Cette tension haute fréquence peut faire en sorte que la tension sur le tube de commutation dépasse la tension de tenue et casse le tube de commutation, de sorte qu'un circuit d'amortissement RCD est ajouté pour fournir un chemin de prise de tension. La diode de récupération rapide FR107 avec une tension de tenue élevée est captée, une résistance RCD 5kΩ et une capacité 3300pF.
Lorsque l'entrée est ouverte avec le tube MOS ouvert, la tension ajoutée sur la diode schottky de sortie (  ) et la panne dure du tube MOS conduit à la panne de la diode. Avec le circuit d'amortissement RC ajouté, la tension sur la diode schottky VD =VO + IO x R3 . Le temps d'ouverture du 2SK792 du tube MOS est de 55ns, la tension de tenue inverse de la diode schottky SB540 est de 60V, la sortie VO est de 5V et le courant maximum est de 3A. Par conséquent, la résistance équivalente du circuit d'amortissement max est de 18,33 Ω et (
) et la panne dure du tube MOS conduit à la panne de la diode. Avec le circuit d'amortissement RC ajouté, la tension sur la diode schottky VD =VO + IO x R3 . Le temps d'ouverture du 2SK792 du tube MOS est de 55ns, la tension de tenue inverse de la diode schottky SB540 est de 60V, la sortie VO est de 5V et le courant maximum est de 3A. Par conséquent, la résistance équivalente du circuit d'amortissement max est de 18,33 Ω et (  ). Lorsque R est de 18 Ω et C de 560 pF, la résistance série équivalente est de 18,06 Ω.
). Lorsque R est de 18 Ω et C de 560 pF, la résistance série équivalente est de 18,06 Ω.
• Conception du circuit de sortie
Le redressement est mis en œuvre par la partie de sortie via une diode schottky et le filtrage applique un condensateur à faible ESR avec un condensateur équivalent ESR réduisant la sortie, comme illustré à la figure 6.
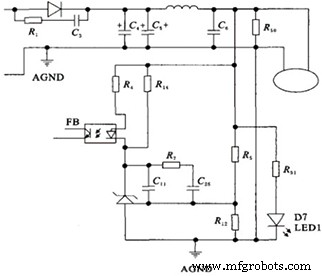
Les circuits d'échantillonnage de sortie sont obtenus via R5 et R12 tension différentielle et la valeur de R12 est déterminé en référence au courant de la borne de sortie TL431 qui est de 1,5 μA. Afin d'éviter que le courant n'influence le rapport de tension différentielle et le bruit, le courant à travers la résistance R12 doit être supérieur à 100 fois le courant d'entrée du TL431. Rbas<2.5/150μA=16.6kΩ. Étant donné que le courant de travail du TL431 est compris entre 1 mA et 100 mA, lorsque le courant de R5 est proche de 0, le courant de 1mA est fourni au TL431 par R14 (R14
Basé sur les courbes caractéristiques de la triode dans PC817B, lorsque le courant direct du transistor est d'environ 7mA, la valeur de IC est également de 7mA et la tension de l'émetteur est linéaire dans une catégorie relativement large avec uc3842comp linear. Le CTR du PC817B est compris entre 1,3 et 2,6. Lorsque la valeur de IC est de 7mA, avec la pire situation considérée, la valeur de CTR est de 1,3. Le courant maximal traversant la LED doit être If =IC /1.3 =5.38mA, R4 <(5 - Uka - Uf )/5.38mA =(5 - 1.15 - 2.5)/5.38mA =250Ω. Le courant maximum que le TL431 peut supporter est de 150 mA tandis que le courant maximum que le PC817 peut supporter est de 50 mA. Par conséquent, le courant maximal R4 fournit 50mA avec R4>(5 - 1,15 - 2,5)/50mA =27Ω. Ainsi, la plage de R4 est compris entre 27Ω et 250Ω avec la valeur de 150Ω sélectionnée.
• Conception du circuit de masse
Le transformateur est appliqué pour l'isolateur de terre entre la terre froide et la terre chaude dans l'alimentation du commutateur. La masse chaude au bord primaire du transformateur peut être formée en boucle à travers le réseau électrique et le transformateur secondaire fait référence à la boucle formée par la masse froide et la masse. Le condensateur de sécurité Y est capté par C16 et C17 pour connecter la ligne zéro et la ligne de tir à la masse du cadre pour filtrer les interférences en mode commun. Condensateur C18 entre la masse chaude et la masse froide transforme le bruit du côté secondaire du transformateur en court-circuit primaire pour réduire les ondes électromagnétiques de rayonnement.
Ressources utiles
• Une introduction complète de l'IoT basée sur la RFID
• Conception de circuits imprimés haute puissance dans un environnement à haute température
• Comment vaincre les défauts de mise à la terre de l'alimentation de contrôle en fonction de la réduction de l'isolation dans la conception des circuits imprimés
• Discussion sur l'alimentation et la masse dans la compatibilité électromagnétique des PCB
• Comment analyser et interdire l'impédance de l'alimentation des PCB à grande vitesse
• PCB à dos d'aluminium :la solution aux applications à haute puissance et à tolérance serrée
• Service de fabrication de circuits imprimés complet de PCBCart - Plusieurs options à valeur ajoutée
• Service d'assemblage de circuits imprimés avancé de PCBCart - Commencez à partir de 1 pièce
Technologie industrielle
- Circuit redresseur/filtre
- Conception de circuits sécurisés
- Systèmes d'alimentation monophasés
- Cartes de circuits imprimés pour l'instrumentation médicale
- Lignes directrices pour la conception RF et micro-ondes
- Conception pour la fabrication de PCB
- Reculs et solutions dans la conception de circuits imprimés RF
- Conception de circuits imprimés pour circuit radiofréquence et compatibilité électromagnétique
- 5 conseils pour la conception de circuits automobiles afin de vaincre les EMI