


Compteurs synchrones
Qu'est-ce qu'un Synchrone Compteur ?
Un compteur synchrone , contrairement à un compteur asynchrone , est celui dont les bits de sortie changent d'état simultanément, sans ondulation.
La seule façon de construire un tel circuit de compteur à partir de bascules J-K est de connecter toutes les entrées d'horloge ensemble, de sorte que chaque bascule reçoive exactement la même impulsion d'horloge au même moment :
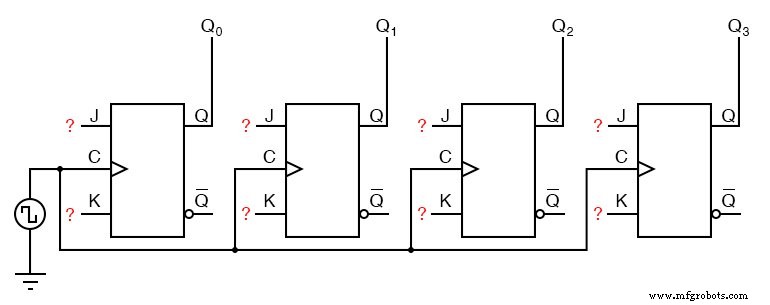
Maintenant, la question est, que faisons-nous avec les entrées J et K ? Nous savons que nous devons toujours maintenir le même modèle de fréquence de division par deux pour compter dans une séquence binaire, et que ce modèle est mieux réalisé en utilisant le mode « bascule » de la bascule, de sorte que le fait que le Les entrées J et K doivent toutes les deux être (parfois) « élevées » est clair.
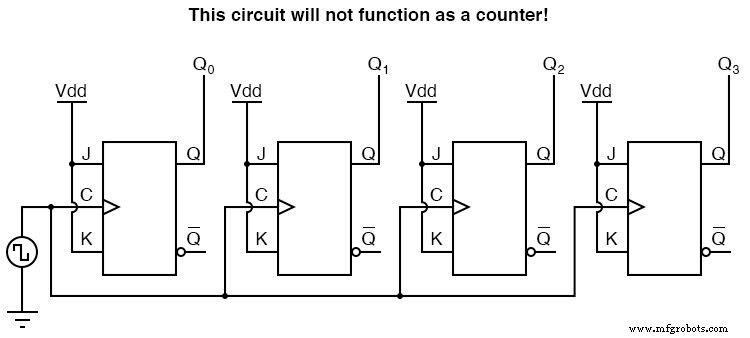
Cependant, si nous connectons simplement toutes les entrées J et K au rail positif de l'alimentation comme nous l'avons fait dans le circuit asynchrone, cela ne fonctionnerait clairement pas car toutes les bascules basculeraient en même temps :à chaque impulsion d'horloge !
Examinons à nouveau la séquence de comptage binaire à quatre bits et voyons s'il existe d'autres modèles qui prédisent le basculement d'un bit.
La conception du circuit de compteur asynchrone est basée sur le fait que chaque basculement de bit se produit en même temps que le bit précédent bascule d'un "haut" à un "bas" (de 1 à 0).
Étant donné que nous ne pouvons pas cadencer le basculement d'un bit en fonction du basculement d'un bit précédent dans un circuit de compteur synchrone (le faire créerait un effet d'entraînement), nous devons trouver un autre motif dans la séquence de comptage qui peut être utilisé pour déclencher un bit bascule :
En examinant la séquence de comptage binaire à quatre bits, un autre modèle prédictif peut être observé.
Notez que juste avant qu'un bit ne bascule, tous les bits précédents sont « high : »
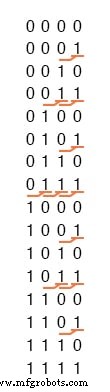
Ce modèle est également quelque chose que nous pouvons exploiter dans la conception d'un circuit de compteur.
Synchrone Compteur « Up »
Si nous permettons à chaque bascule JK de basculer en fonction du fait que toutes les sorties de bascule précédentes (Q) sont ou non « hautes », nous pouvons obtenir la même séquence de comptage que le circuit asynchrone sans effet d'entraînement, puisque chaque bascule dans ce circuit sera cadencé exactement à la même heure :
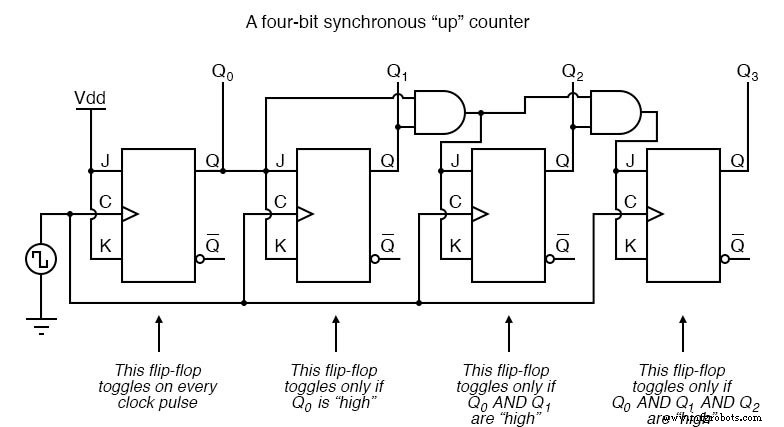
Le résultat est un synchrone à quatre bits compteur « en haut ». Chacune des bascules d'ordre supérieur est prête à basculer (les entrées J et K sont "hautes") si les sorties Q de toutes les bascules précédentes sont "hautes".
Sinon, les entrées J et K de cette bascule seront toutes les deux "basses", la plaçant en mode "verrou" où elle maintiendra son état de sortie actuel à la prochaine impulsion d'horloge.
Étant donné que la première bascule (LSB) doit basculer à chaque impulsion d'horloge, ses entrées J et K sont connectées à Vcc ou Vdd , où ils seront « élevés » tout le temps.
La bascule suivante n'a qu'à « reconnaître » que la sortie Q de la première bascule est élevée pour être prête à basculer, donc aucune porte ET n'est nécessaire.
Cependant, les tongs restantes doivent être prêtes à basculer uniquement lorsque toutes les bits de sortie d'ordre inférieur sont « élevés », d'où le besoin de portes ET.
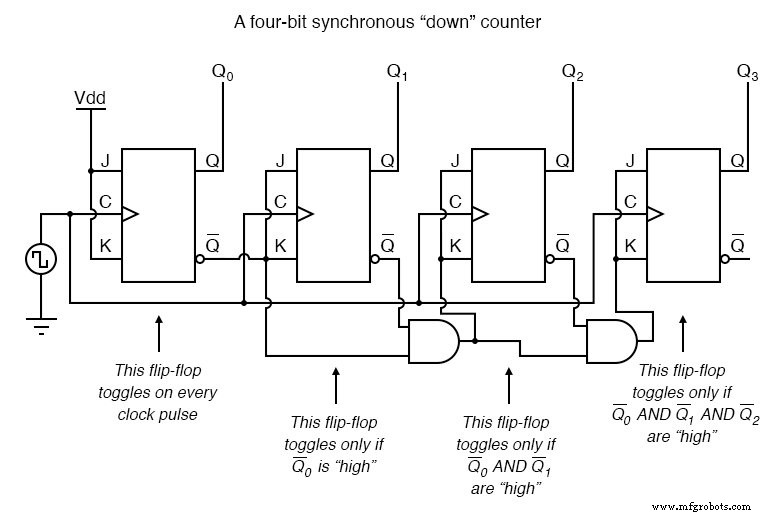
Compteur « vers le bas » synchrone
Pour créer un compteur « dégressif » synchrone, nous devons construire le circuit pour reconnaître les modèles de bits appropriés prédisant chaque état de basculement pendant le décompte.
Sans surprise, lorsque nous examinons la séquence de comptage binaire à quatre bits, nous voyons que tous les bits précédents sont « bas » avant une bascule (en suivant la séquence de bas en haut) :

Étant donné que chaque bascule JK est équipée d'une sortie Q' ainsi que d'une sortie Q, nous pouvons utiliser les sorties Q' pour activer le mode bascule sur chaque bascule suivante, étant donné que chaque Q' sera "élevé" chaque temps pendant lequel le Q respectif est « faible » :
Circuit de compteur avec modes de comptage sélectionnables "en haut" et "en bas"
En poussant cette idée un peu plus loin, nous pouvons construire un circuit de compteur avec des modes de comptage sélectionnables entre "up" et "down" en ayant deux lignes de portes ET détectant les conditions de bits appropriées pour une séquence de comptage "up" et "down", respectivement, puis utilisez les portes OU pour combiner les sorties de la porte ET aux entrées J et K de chaque bascule suivante :
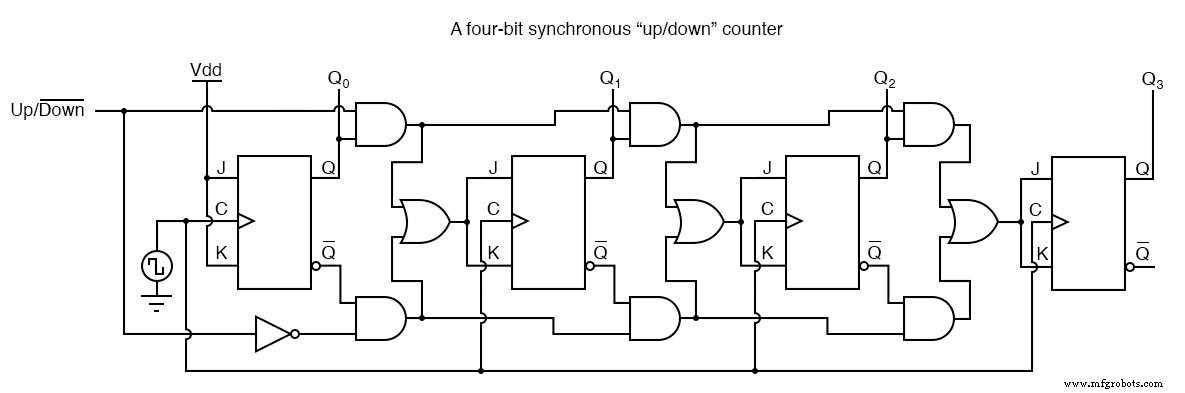
Ce circuit n'est pas aussi complexe qu'il n'y paraît au premier abord. La ligne d'entrée de contrôle Up/Down permet simplement à la chaîne supérieure ou inférieure des portes ET de transmettre les sorties Q/Q' aux étages suivants des bascules.
Si la ligne de commande haut/bas est « haute », les portes ET supérieures sont activées et le circuit fonctionne exactement de la même manière que le premier circuit de compteur synchrone (« haut ») illustré dans cette section.
Si la ligne de commande haut/bas est rendue « bas », les portes ET inférieures sont activées et le circuit fonctionne de la même manière que le deuxième circuit (« décompteur ») illustré dans cette section.
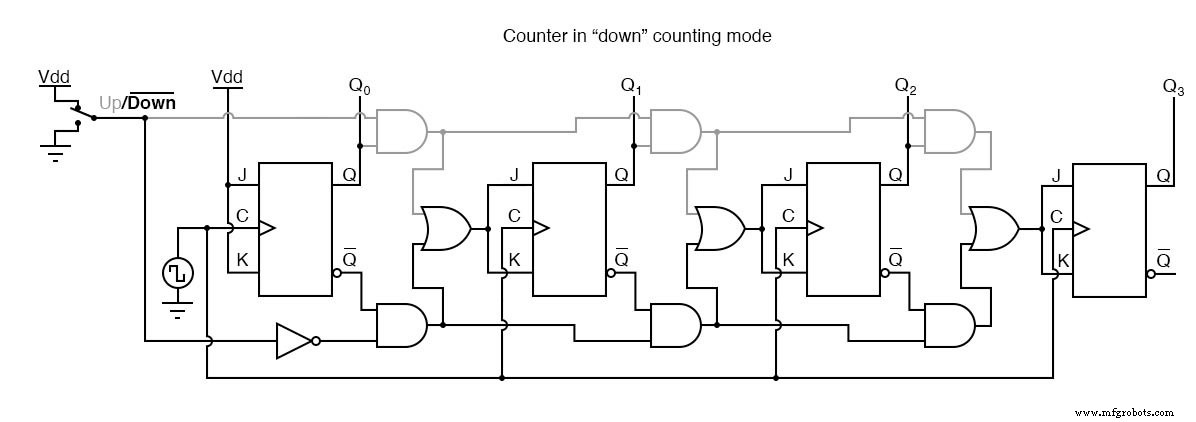
Pour illustrer, voici un schéma montrant le circuit en mode de comptage "up" (tous les circuits désactivés sont affichés en gris plutôt qu'en noir) :

Ici, montré en mode décomptage, avec la même coloration grise représentant les circuits désactivés :
Les circuits de compteur/décompteur sont des dispositifs très utiles. Une application courante est le contrôle de mouvement de la machine, où des dispositifs appelés encodeurs à arbre rotatif convertir la rotation mécanique en une série d'impulsions électriques, ces impulsions "synchronisant" un circuit de compteur pour suivre le mouvement total :
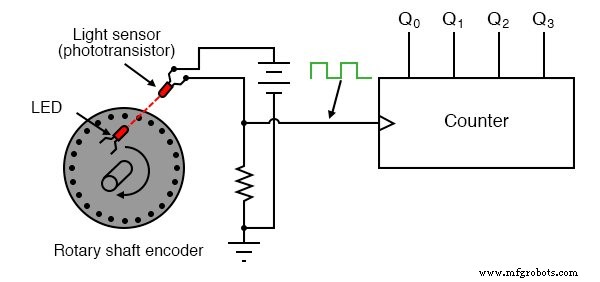
Au fur et à mesure que la machine se déplace, elle fait tourner l'arbre du codeur, créant et interrompant le faisceau lumineux entre la LED et le phototransistor, générant ainsi des impulsions d'horloge pour incrémenter le circuit du compteur.
Ainsi, le compteur intègre, ou accumule, le mouvement total de l'arbre, servant d'indication électronique de la distance parcourue par la machine.
Si tout ce dont nous nous soucions est de suivre le mouvement total et que nous ne tenons pas compte des changements dans la direction de mouvement, cette disposition suffira.
Cependant, si nous souhaitons que le compteur incrémente avec une direction de mouvement et décrément avec le sens inverse du mouvement, il faut utiliser un compteur/décompteur, et un circuit encodeur/décodage ayant la capacité de discriminer entre les différentes directions.
Si nous reconcevons l'encodeur pour qu'il ait deux ensembles de paires LED/phototransistor, ces paires s'alignent de telle sorte que leurs signaux de sortie à onde carrée soient à 90 o déphasés les uns par rapport aux autres, nous avons ce qu'on appelle une sortie en quadrature encodeur (le mot "quadrature" fait simplement référence à un 90 o séparation angulaire).
Un circuit de détection de phase peut être réalisé à partir d'une bascule de type D, pour distinguer une séquence d'impulsions dans le sens horaire d'une séquence d'impulsions dans le sens antihoraire :
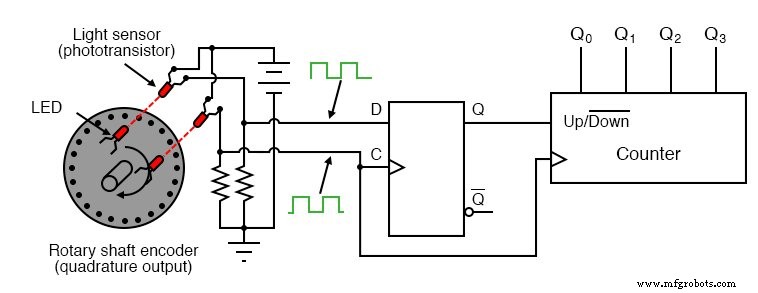
Lorsque l'encodeur tourne dans le sens des aiguilles d'une montre, l'onde carrée du signal d'entrée "D" mènera l'onde carrée d'entrée "C", ce qui signifie que l'entrée "D" sera déjà "haute" lorsque le "C" passe de "bas" à "élevé", donc réglage la bascule de type D (rendant la sortie Q « élevée ») à chaque impulsion d'horloge.
Une sortie Q "élevée" place le compteur en mode de comptage "Up", et toute impulsion d'horloge reçue par l'horloge de l'encodeur (de l'une ou l'autre LED) l'incrémentera.
Inversement, lorsque l'encodeur inverse la rotation, l'entrée "D" sera en retard par rapport à la forme d'onde d'entrée "C", ce qui signifie qu'elle sera "faible" lorsque la forme d'onde "C" passera de "faible" à "élevé", forçant le D -type flip-flop dans le reset état (rendant la sortie Q "faible") à chaque impulsion d'horloge.
Ce signal « bas » commande au circuit du compteur de décrémenter à chaque impulsion d'horloge du codeur.
Ce circuit, ou quelque chose qui lui ressemble beaucoup, est au cœur de chaque circuit de mesure de position basé sur un capteur d'encodeur d'impulsions.
De telles applications sont très courantes dans la robotique, le contrôle de machines-outils CNC et d'autres applications impliquant la mesure de mouvements mécaniques réversibles.
FICHES DE TRAVAIL CONNEXES :
- Feuille de travail du compteur synchrone
Technologie industrielle