


Qu'est-ce que le capteur à ultrasons HC-SR04 :Fonctionnement et ses applications
Le capteur à ultrasons HC-SR04 comprend un émetteur et un récepteur. Ce capteur est utilisé pour connaître la distance de l'objectif. Ici, le temps nécessaire pour transmettre et recevoir les ondes décidera de la distance entre le capteur et un objet. Ce capteur utilise des ondes sonores en utilisant la technologie sans contact. En utilisant ce capteur, la distance requise pour la cible peut être mesurée sans dommage et fournit des détails précis. La portée de ce capteur disponible entre 2 cm et 400 cm.
Qu'est-ce que le capteur à ultrasons HC-SR04 ?
Le HC-SR04 est un type de capteur à ultrasons qui utilise un sonar pour connaître la distance de l'objet par rapport au capteur. Il offre une gamme exceptionnelle de détection sans contact avec une précision élevée et des lectures stables. Il comprend deux modules comme l'émetteur et le récepteur à ultrasons. Ce capteur est utilisé dans une variété d'applications telles que la mesure de la direction et de la vitesse, les alarmes antivol, le médical, le sonar, les humidificateurs, le chargement sans fil, les tests non destructifs et l'échographie.

Configuration des broches du capteur à ultrasons HC-SR04
Ce capteur comprend quatre broches et la configuration des broches de ce capteur est décrite ci-dessous.
- Broche 1 (Vcc) :cette broche fournit une alimentation de +5 V au capteur.
- Broche 2 (déclencheur) :il s'agit d'une broche d'entrée, utilisée pour initialiser la mesure en transmettant des ondes ultrasonores en maintenant cette broche haute pendant 10 us.
- Pin3 (Echo) :il s'agit d'une broche de sortie, qui passe au niveau haut pendant une période de temps spécifique et elle sera équivalente à la durée pendant laquelle la vague revient à le capteur.
- Pin4 (Ground) :il s'agit d'une broche GND utilisée pour se connecter au GND du système.
Fonctionnalités
Les caractéristiques du capteur HC-SR04 inclure les éléments suivants
- L'alimentation utilisée pour ce capteur est de +5V DC
- La dimension est de 45 mm x 20 mm x 15 mm
- Le courant de repos utilisé pour ce capteur est <2mA
- La largeur d'impulsion d'entrée du déclencheur est de 10uS
- Le courant de fonctionnement est de 15 mA
- L'angle de mesure est de 30 degrés
- La plage de distance est de 2 cm à 800 cm
- La résolution est de 0,3 cm
- L'angle effectif est <15°
- La plage de fréquence de fonctionnement est de 40 Hz
- La précision est de 3 mm
fonctionnement du capteur à ultrasons HC-SR04
Le capteur à ultrasons HC-SR04 est livré avec quatre broches, à savoir la broche Vcc, la broche de déclenchement, la broche d'écho et la broche de masse. Ce capteur est utilisé pour mesurer la distance précise entre la cible et le capteur. Ce capteur fonctionne principalement sur les ondes sonores.
Lorsque l'alimentation est fournie à ce module, il génère les ondes sonores qui voyagent dans l'air pour frapper l'objet nécessaire. Ces ondes frappent et reviennent de l'objet, puis sont collectées par le module récepteur.
Ici, la distance ainsi que le temps pris sont directement proportionnels car le temps pris pour plus de distance est élevé. Si la goupille de déclenchement est maintenue haute pendant 10 µs, les ondes ultrasonores seront générées et se déplaceront à la vitesse du son. Cela crée donc huit cycles de rafale sonore qui seront rassemblés dans la broche Echo. Ce capteur à ultrasons est interfacé avec Arduino pour mesurer la distance nécessaire entre le capteur et l'objet. La distance peut être calculée à l'aide de la formule suivante.
S =(V x t)/2
Où le 'S' est la distance requise
'V' est la vitesse du son
't' est le temps nécessaire pour que les ondes sonores reviennent après avoir heurté l'objet.
La distance réelle peut être calculée en divisant sa valeur par 2 car le temps sera double une fois que les vagues se déplaceront et reviendront du capteur.
Capteur à ultrasons HC-SR04 avec carte Arduino
Nous donnons ici un exemple pour le capteur à ultrasons HC-SR04 utilisant la carte Arduino. Ce capteur est interfacé avec une carte Arduino.
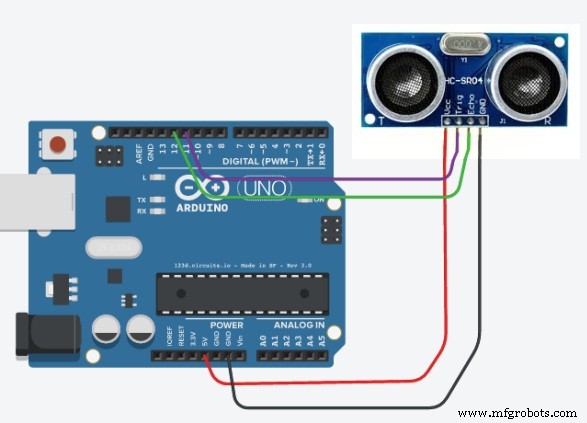
Les composants requis de ce projet incluent principalement la carte Arduino UNO, le capteur à ultrasons HC-SR04, la maquette et les câbles de raccordement. Les connexions de ce projet sont très simples comme les suivantes.
- La broche VCC du capteur est connectée au 5V de l'Arduino
- La broche de déclenchement du capteur est connectée à la broche 11 de l'Arduino
- La broche Echo du capteur est connectée à la broche 12 de l'Arduino
- La broche GND du capteur est connectée à la broche GND de l'Arduino
Travail
La mesure d'une distance précise peut être obtenue en interfaçant le capteur HC-SR04 avec différents types de cartes Arduino.
Dans un premier temps, alimentez le capteur pour l'allumer et connectez la broche GND de ce capteur à la broche GND de la carte Arduino. Et le module de capteur peut être alimenté avec l'alimentation en tension de la carte Arduino lorsque le courant qui traverse le capteur est inférieur à 15mA. Ainsi, les valeurs nominales de courant Arduino n'affecteront pas le capteur.
Une fois l'arrangement principal configuré, connectez les deux broches des capteurs comme Trig &Echo aux broches d'entrée/sortie de la carte Arduino. Comme nous l'avons vu précédemment, la broche Trig du capteur doit être maintenue à 10 us au début afin de démarrer la méthode de mesure. Ainsi, ce module de capteur générera des ondes sonores à la fréquence de 40 000 Hz environ pour chaque seconde à partir de la source.
Lorsque les ondes sonores reviennent, la broche Echo s'activera jusqu'à ce que ces ondes soient obtenues par le récepteur. Le temps sera mesuré à l'aide d'une carte Arduino.
Applications
Les applications du capteur HC-SR04 inclure les éléments suivants,
- Ce capteur est utilisé pour mesurer la vitesse ainsi que la direction entre deux objets
- Il est utilisé dans la recharge sans fil
- Échographie médicale
- Ceci est utilisé pour détecter des objets et éviter les obstacles à l'aide de robots tels que bipède, recherche de chemin, évitement d'obstacles, etc.
- Mesure de profondeur
- Humidificateurs
- Ce capteur est utilisé pour tracer les objets à proximité du capteur en le faisant tourner
- Tests non destructifs
- En utilisant ce capteur de profondeur de puits, les puits peuvent être mesurés en transmettant les vagues à travers l'eau.
- Système embarqué
- Alarmes antivol
Ainsi, il s'agit du capteur à ultrasons HC-SR04. D'après les informations ci-dessus, nous pouvons enfin conclure que ce capteur utilise un sonar pour mesurer la distance entre le capteur et l'objet. L'émetteur envoie un signal sonore à haute fréquence. Une fois que le signal découvre un objet, il se réfléchit sur la broche d'écho de l'émetteur. Le temps pris pour la transmission du signal ainsi que la réception nous permet de déterminer la distance à un objet. Voici une question pour vous, quels sont les mêmes capteurs de détermination de distance ?
Capteur
- Qu'est-ce qu'un capteur radar :fonctionnement et ses applications
- Qu'est-ce qu'un capteur de distance fonctionnant et ses applications
- Qu'est-ce qu'un capteur IMX586 :Fonctionnement et ses fonctionnalités
- Qu'est-ce que le capteur de poids et ses spécifications
- Qu'est-ce que le capteur ECG AD8232 :fonctionnement et ses applications
- Fonctionnement du capteur virtuel et ses applications
- Fonctionnement du capteur de tension et ses applications
- Sonde Lambda – Fonctionnement et ses applications
- Fonctionnement du capteur IMU et ses applications