


ROS2 + DDS :rejouer
PointCloud2_ Pour relire les données enregistrées dans ROS2 : Résultats Maintenant, j'ai collecté des données LiDAR ROS2, générées au cours d'une série de sessions d'auto-simulateur, et celles-ci sont toutes rejouables à la demande, comme prévu :
Bien ! Je peux désormais relire les données LiDAR à la demande sans avoir besoin d'un simulateur automobile dédié (ou d'un véhicule réel). C'était amusant de jouer avec le Pour plus d'informations sur ROS2 et DDS, consultez les précédents articles du blog RTI : Un guide de terrain sur l'interopérabilité et la fusion des écosystèmes
rtireplay -cfgFile ros2_replay.xml -cfgName simple_example 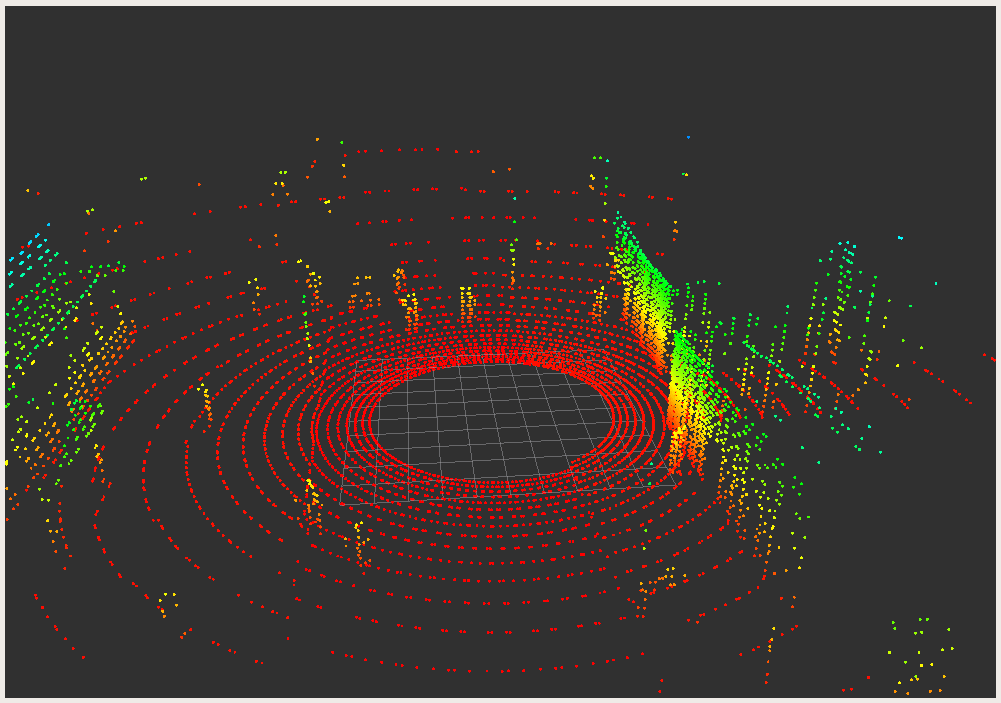
Technologie de l'Internet des objets
- Logiciel DDS ouvert vs RTI DDS
- MQTT et DDS :communication machine à machine dans l'IoT
- La quatrième révolution industrielle
- Rester conforme aux données dans l'IoT
- Que dois-je faire avec les données ? !
- Démocratiser l'IoT
- 5 tendances en matière de connectivité
- Top 10 des plates-formes IIoT
- L'avenir des centres de données