


Optimisation de la détection d'inclinaison/d'angle de haute précision :amélioration des performances
Dans la première partie de cette série, nous avons examiné la structure interne d'un accéléromètre MEMS de haute précision à 3 axes. Dans la deuxième partie, nous avons examiné comment acquérir un bon ensemble de données de départ pour établir les performances de base et valider à quel type de niveaux de bruit s'attendre dans les analyses de données ultérieures. Dans ce dernier volet de notre série, nous explorons d'autres facteurs affectant la stabilité, puis proposons des recommandations de conception de système mécanique pour améliorer les performances globales d'un accéléromètre MEMS de haute précision à 3 axes.
Une fois que les contraintes thermiques dans la conception sont bien comprises, un autre aspect important des capteurs inertiels est leur stabilité à long terme, ou répétabilité. La répétabilité est définie comme la précision de mesures successives dans les mêmes conditions sur une longue période de temps. Par exemple, prendre deux mesures d'un champ de gravité dans la même orientation par rapport à la gravité à la même température sur une période prolongée et voir à quel point elles correspondent. La répétabilité de l'offset et de la sensibilité sont d'une importance primordiale lors de l'évaluation de la stabilité à long terme d'un capteur dans des applications qui ne peuvent pas prendre en charge un étalonnage de maintenance régulier. De nombreux fabricants de capteurs ne caractérisent ni ne spécifient la stabilité à long terme dans leurs fiches techniques. Dans la fiche technique ADXL355 d'ADI, par exemple, la répétabilité est prévue pour une durée de vie de 10 ans et comprend les décalages mesurés dus au test de durée de vie à haute température (HTOL) (TA =150°C, VSUPPLY =3,6 V et 1000 heures), mesuré cycle de température (−55 °C à +125 °C et 1000 cycles), marche aléatoire de la vitesse, bruit à large bande et hystérésis de température. La répétabilité indiquée dans la fiche technique est de ±2 mg et ±3 mg pour les capteurs X/Y et Z, respectivement. Ces mesures sont importantes pour évaluer les performances à long terme.
La répétabilité dans des conditions mécaniques, environnementales et inertielles stables suit la loi de la racine carrée en ce qui concerne le temps mesuré. Par exemple, pour obtenir la répétabilité du décalage de l'axe des x pendant 2,5 ans (éventuellement un profil de mission plus court pour un produit final), utilisez l'équation suivante :±2 mg × √(2,5 ans/10 ans) =±1 mg . La figure 1 montre un exemple de résultat de test HTOL de 0 g dérive décalée de 32 appareils sur 23 jours. La loi de la racine carrée est clairement observable sur cette figure. Il convient également de souligner que chaque pièce se comporte différemment (certaines sont plus performantes que d'autres) en raison de la variation des processus de fabrication des capteurs MEMS.
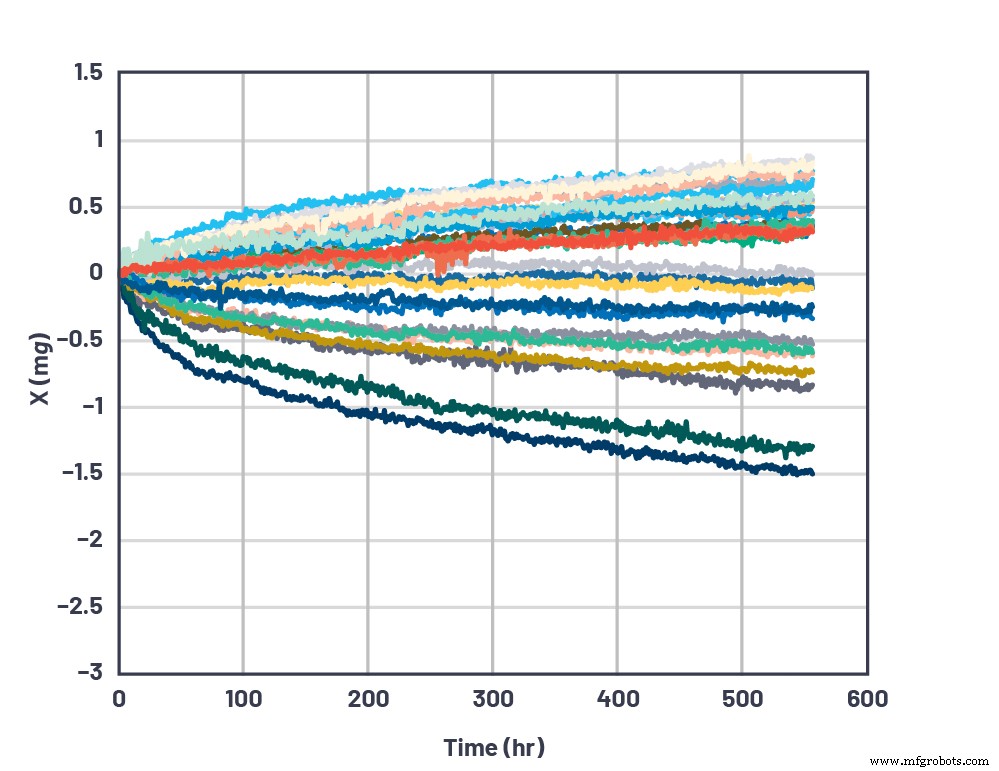
Figure 1. Stabilité à long terme de 500 heures de l'ADXL355. (Source :Appareils analogiques)
Recommandations de conception de système mécanique
Fort des connaissances de la discussion précédente, il est clair que les interfaces de montage mécaniques et la conception du boîtier contribueront aux performances globales d'un capteur accéléromètre MEMS haute précision à 3 axes car elles affecteront les contraintes physiques propagées au capteur. En général, le montage mécanique, le boîtier et le capteur forment un système de second ordre (ou supérieur); par conséquent, sa réponse varie entre résonance ou suramortissement.
Les systèmes de support mécanique ont des modes qui représentent ces systèmes de second ordre (définis par la fréquence de résonance et le facteur de qualité). Dans la plupart des cas, l'objectif est de comprendre ces facteurs et de minimiser leurs impacts sur le système de détection. Ainsi, la géométrie de toute enceinte dans laquelle le capteur sera emballé, ainsi que toutes les interfaces et matériaux, doivent être choisis pour éviter l'atténuation mécanique (due au suramortissement) ou l'amplification (due à la résonance) dans la bande passante de l'application de l'accéléromètre. Les détails de ces considérations de conception sortent du cadre de cet article ; cependant, quelques éléments pratiques sont brièvement listés :
PCB, montage et boîtier
- Fixez solidement le PCB à un substrat de corps rigide. L'utilisation de plusieurs vis de montage en combinaison avec un adhésif à l'arrière du PCB offre le meilleur support.
- Placez le capteur à proximité d'une vis de montage ou d'une attache. Si la géométrie du PCB est grande (quelques pouces), utilisez plusieurs vis de montage au milieu de la carte pour éviter les vibrations à basse fréquence du PCB, qui se coupleront à l'accéléromètre et seront mesurées.
- Si les PCB ne sont soutenus mécaniquement que par une structure rainure/languette, utilisez un PCB plus épais (une épaisseur supérieure à 2 mm est recommandée). Dans le cas de PCB avec une géométrie plus grande, augmentez l'épaisseur pour maintenir la rigidité du système. Utilisez l'analyse par éléments finis, comme ANSYS ou similaire, pour la géométrie et l'épaisseur optimales du PCB pour une conception spécifique.
- Pour les applications telles que la surveillance de l'état des structures où les capteurs sont mesurés pendant une longue période, la stabilité à long terme des capteurs est essentielle. Les emballages, les PCB et les matériaux adhésifs doivent être choisis pour minimiser la dégradation ou le changement des propriétés mécaniques au fil du temps, ce qui pourrait contribuer à des contraintes supplémentaires sur le capteur et, par conséquent, des décalages.
- Évitez de faire des hypothèses sur les fréquences naturelles de l'enceinte. Le calcul des modes de vibration naturels dans le cas d'enceintes simples et l'analyse par éléments finis dans le cas de conceptions d'enceintes plus complexes seront utiles.
- Il a été démontré que l'accumulation de contrainte due au soudage de l'accéléromètre sur une carte provoque un décalage de l'offset jusqu'à quelques mg. Pour atténuer cet effet, la symétrie dans le modèle d'atterrissage du PCB, les plots thermiques et les chemins de conduction à travers la trace de cuivre sur le PCB sont recommandées. Suivez attentivement le guide de soudure fourni dans la fiche technique de l'accéléromètre. Il est également observé que, dans certains cas, le recuit de soudure ou le cyclage thermique avant tout étalonnage sont utiles pour soulager l'accumulation de contraintes et gérer les problèmes de stabilité à long terme.
Composés d'empotage
Les composés d'enrobage sont largement utilisés pour sécuriser l'électronique à l'intérieur d'un boîtier. Si le boîtier du capteur est un plastique surmoulé, tel qu'un réseau de grilles terrestres (LGA), l'utilisation de composés d'enrobage est fortement déconseillée en raison de l'inadéquation de leur coefficient de température (TC) avec le matériau du boîtier, ce qui entraîne une pression exercée directement sur le capteur, puis décalée. . Un accéléromètre MEMS de haute précision à 3 axes, livré dans un boîtier en céramique hermétiquement scellé, protège considérablement le capteur de l'effet TC. Mais les composés d'enrobage peuvent toujours contribuer à l'accumulation de contraintes sur le PCB en raison de la dégradation du matériau au fil du temps, provoquant potentiellement une contrainte sur le capteur par le biais de petits gauchissements de la puce en silicium. Il est généralement recommandé d'éviter l'enrobage des capteurs dans les applications nécessitant une grande stabilité dans le temps. Les revêtements de protection à faible contrainte tels que le parylène C pourraient fournir une certaine forme de barrière contre l'humidité en remplacement de l'empotage. 8
Flux d'air, transfert de chaleur et équilibre thermique
Pour obtenir les meilleures performances du capteur, il est important de concevoir, de localiser et d'utiliser le système de détection dans un environnement où la stabilité de la température est optimisée. Comme le montre cet article, même de petits changements de température peuvent donner des résultats inattendus en raison de contraintes thermiques différentielles sur la puce du capteur. Voici quelques conseils :
- Le capteur doit être positionné sur le PCB de sorte que les gradients thermiques à travers le capteur soient minimes. Par exemple, les régulateurs linéaires peuvent générer des quantités importantes de chaleur; par conséquent, leur proximité avec le capteur peut provoquer des gradients de température à travers le MEMS qui peuvent varier avec les sorties de courant au fil du temps dans le régulateur.
- Si possible, le module de capteur doit être déployé dans des zones éloignées des flux d'air (par exemple, CVC) pour éviter les fluctuations de température fréquentes. Si cela n'est pas possible, une isolation thermique à l'extérieur ou à l'intérieur de l'emballage est utile et peut être réalisée avec une isolation thermique. Notez que les chemins thermiques de conduction et de convection doivent être pris en compte.
- Il est recommandé de choisir la masse thermique du boîtier de manière à amortir les fluctuations thermiques environnementales dans les applications où les changements thermiques environnementaux sont inévitables.
Conclusion
Cet article a montré comment les performances d'un accéléromètre MEMS de haute précision peuvent être dégradées sans une prise en compte adéquate des effets environnementaux et mécaniques. Grâce à des pratiques de conception holistiques et à une concentration au niveau du système, les ingénieurs avertis peuvent obtenir d'excellentes performances pour leur système de capteurs. Comme beaucoup d'entre nous subissent des stress sans précédent dans nos vies, il est utile de réaliser que, comme les accéléromètres, ce n'est jamais le stress qui nous tue, c'est notre réaction !
Références
- Chris Murphy. "Choisir l'accéléromètre MEMs le plus adapté à votre application - Partie 1." Dialogue analogique, Vol. 51, n° 4, octobre 2017.
- Chris Murphy. « Mesure de l'inclinaison de l'accéléromètre au-dessus de la température et en présence de vibrations ». Analog Dialogue, août 2017.
- Système d'évaluation SDP-K1. Appareils analogiques, Inc.
- Mbed :Guide de l'utilisateur pour SDP-K1. Appareils analogiques, Inc.
- Support de bras articulé PanaVise. PanaVise.
- Code Mbed. Appareils analogiques, Inc.
- Pistolet à air de chauffage/refroidissement Weller 6966C. Weller.
- Parylène. Wikipédia.
Embarqué
- VersaLogic lance un ordinateur embarqué hautes performances basé sur Xeon
- Abaco :XMC robuste offre 2,3 TeraFLOPS de performances de pointe et prend en charge CUDA et OpenCL
- L'unité commerciale Matériaux Haute Performance de Lanxess devient juridiquement indépendante
- Étiquetage dans le moule :hautes performances à moindre coût
- La gamme de produits CFRTP allie processabilité, performances mécaniques
- Centres CNC robustes et de haute précision
- Tournage haute performance
- Le centre de tournage multitâche propose des broches jumelées
- Le tour d'outillage offre une haute précision