


La technologie du temps de vol promet une précision améliorée
Analog Devices (ADI) et Microsoft se sont associés pour produire des solutions d'imagerie 3D à temps de vol (ToF) dans le but de fournir une plus grande précision quelles que soient les conditions de la scène. ADI tirera parti de la technologie Azure Kinect 3D ToF de Microsoft et ajoutera son expertise technique en matière de circuits intégrés et de systèmes pour créer des solutions plus faciles à adopter. L'objectif est d'atteindre un large public dans des secteurs tels que l'industrie 4.0, l'automobile, les jeux, la réalité augmentée et la photographie et la vidéographie informatiques.
Les analystes du marché de l'industrie estiment une forte croissance des systèmes d'imagerie 3D utilisés dans des environnements difficiles et où des applications de pointe telles que les robots de collaboration humaine, la cartographie des salles et les systèmes de gestion des stocks sont nécessaires pour donner vie à l'industrie 4.0. Les applications ToF sont également nécessaires pour créer des environnements de conduite automobile plus sûrs avec des capacités de détection d'occupation et de surveillance du conducteur.
Dans une interview avec EE Times, Tony Zarola, directeur principal de l'imagerie et de l'interprétation améliorées et Carlos Calvo, responsable marketing stratégique chez Analog Devices, ont souligné les fondements de cette collaboration . Zarola a dit, “ Microsoft est devenu la référence en matière de performances ToF 3D parmi les fabricants de capteurs d'image et fournit à ADI la technologie de pixel de base qui est à la base des capteurs et des solutions qu'ADI construit. Au fil des décennies, ils ont développé l'expertise requise pour la meilleure capture de données et les algorithmes révolutionnaires qu'ils exécutent à la périphérie intelligente ou sur le cloud intelligent. Nous sommes impatients de combiner le meilleur des capacités de Microsoft et d'ADI en matière de silicium, de systèmes, de logiciels et d'optique. »
Conception ToF 3D
La reconnaissance de gestes est la capacité d'un appareil à identifier une série de mouvements du corps humain. La technologie électronique est basée sur l'aide d'une caméra et d'un circuit intégré pour l'identification et la numérisation de la scène dans un profil 2D ou 3D. La technique du temps de vol consiste à envoyer un faisceau laser vers la cible et à analyser la réflexion du signal.
Le temps de vol 3D, ou ToF 3D, est un type de LIDAR (détection et télémétrie de la lumière) sans scanner qui utilise des impulsions optiques de haute puissance en nanosecondes pour capturer des informations de profondeur (généralement sur de courtes distances) d'une scène. Les différentes solutions IC, à l'aide d'algorithmes logiciels de reconnaissance de gestes, créent une carte de profondeur des images reçues, répondant en temps réel aux mouvements du corps. Le principal avantage de la technologie de reconnaissance des gestes est qu'aucun contact physique n'est nécessaire entre l'individu et le système de contrôle.
Une caméra ToF mesure la distance en illuminant un objet grâce à une lumière laser modulée et un capteur laser sensible à la longueur d'onde pour capturer la lumière réfléchie. Le capteur mesure le délai entre le moment où la lumière est émise et le moment où la lumière réfléchie est reçue par la caméra. Il existe plusieurs méthodes pour mesurer le retard temporel, dont deux sont devenues courantes :la méthode à onde continue (CW) et la méthode à impulsions. La grande majorité des capteurs ToF sont CW et utilisent des capteurs CMOS.
Il existe de nombreux facteurs de confusion qui rendent difficile la mesure du temps de vol (ToF) :lumière ambiante interférente, effets de trajets multiples causés par la lumière qui rebondit sur des objets de la scène altérant la distance réelle, effets de température, ambiguïté de la portée. "Les défis vont du développement du silicium à la création d'un système complet qui fonctionne en alignement avec la somme théorique des pièces", a déclaré Calvo. « Il est impossible d'examiner chaque composant isolément. Par exemple, une caméra ToF avec le meilleur capteur mais équipée d'un objectif non optimisé aura de mauvaises performances globales du système. »
« En surface, les caméras ToF présentent des similitudes avec les caméras RVB. Une distinction clé est que selon l'application, la qualité d'image de la caméra RVB est jugée avec un certain degré de subjectivité; les autres applications ne sont activées que via un post-traitement avancé. Une caméra ToF mesure une quantité physique objective (distance) sur laquelle un utilisateur, selon l'application, peut se fier de manière significative à la précision de l'image. Certaines imperfections optiques des caméras RVB, telles que la lumière parasite, peuvent produire des artefacts parfois considérés comme artistiques (par exemple, la lumière parasite). Dans un système ToF, la lumière parasite, si elle n'est pas considérablement réduite, peut paralyser les performances de l'ensemble du système en présence de fortes réflexions d'objets, a ajouté Calvo »
Le capteur CMOS utilisé pour le temps de vol se compose à la fois d'un émetteur et d'un récepteur; il permet des calculs de distance d'objets au niveau d'un seul pixel avec une performance proche de 160 fps.
« Au niveau du silicium, il faut considérer les éléments clés de la chaîne du signal :le pilote laser, le capteur d'image ToF avec lecture intégrée et enfin le moteur de calcul de profondeur. Le défi commence par la conception d'un pixel à haute réactivité et à fort contraste de modulation dans le capteur d'image lui-même et se termine par la formation d'un nuage de points 3D qui peut être interprété par la couche d'application suivante.
« Outre les composants, les principaux défis découlent de la conception et de la production d'une caméra de profondeur, car la conception opto-mécanique, l'étalonnage, la conception électrique et la mise en œuvre du logiciel prennent du temps et sont difficiles. Analog Devices (ADI) relève ces défis pour nos clients afin de faciliter leur processus de conception », a déclaré Calvo.
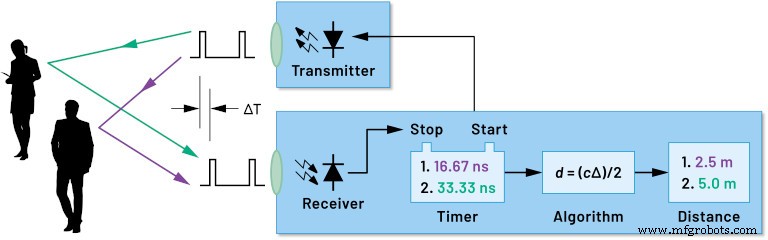
Figure 1. Schéma fonctionnel ToF. (source :ADI)
Les pixels collectent la lumière de parties distinctes de la scène, et leur recombinaison constituera l'image reconstruite. Tous les pixels du capteur sont contrôlés par une corrélation entre les blocs de démodulation et de modulation. Chaque pixel peut être approximé par le modèle illustré à la figure 2.
Le courant est dirigé vers le nœud A (Da) ou le nœud B (Db) pendant le temps d'intégration en activant les signaux de commande correspondants. La lecture s'effectue avec la démodulation arrêtée, de sorte que le système puisse lire l'intégralité de la séquence de bits. ClkA et ClkB sont modulés en déphasage de 180 degrés pendant le temps tInt1 à la fréquence de modulation sélectionnée. La phase de la lumière reçue concernant l'horloge ClkA &CLkB détermine les signaux DA et DB. A la fin de l'intégration, ClkA &ClkB sont éteints, et la phase de lecture s'effectue par échantillonnage du signal intégré (BitlineAInt1-BitlineBInt1).
La conversion des photons en courant électrique est régie par un processus quantique avec une distribution de Poisson. Le paramètre qui nous donne une idée de la bonté du système est l'efficacité quantique, c'est-à-dire le rapport entre le nombre d'électrons produits, et celui des photons qui activent les pixels correspondants. Le nombre d'électrons dépend à la fois de la lumière modulée réelle et de la lumière ambiante qui correspond à l'effet de bruit. Un paramètre à choisir lors de la conception d'un système de temps de vol est le FoV (Field of View). Le FoV doit être choisi de manière appropriée en fonction des exigences de couverture de la scène.
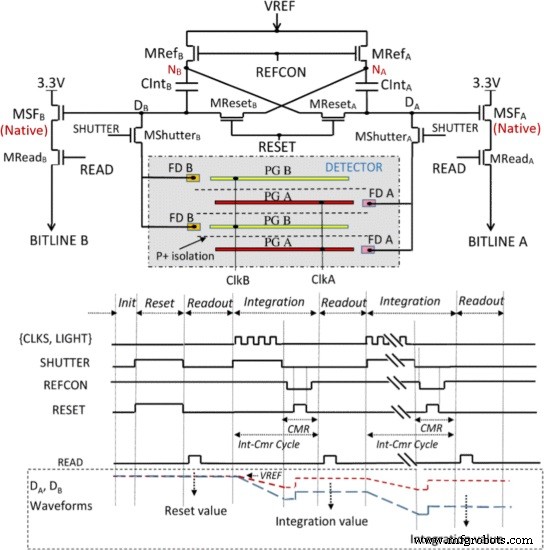
Figure 2. Circuit électrique et synchronisation pour un pixel. (Source :https://ieeexplore.ieee.org/document/6964815 )
Afin d'obtenir une efficacité élevée à hautes fréquences, la puce peut être fabriquée en utilisant un processus CMOS à faible consommation et à signaux mixtes de 0,13 m avec des modifications mineures pour prendre en charge un fonctionnement efficace du temps de vol.
ADI et Microsoft
La collaboration entre Microsoft et ADI vise à améliorer la technologie ToF :ADI conçoit une nouvelle série de capteurs d'images ToF 3D qui fourniront une précision inférieure au millimètre et seront compatibles avec l'écosystème du géant de Redmond, basé sur la profondeur Microsoft, Intelligent Cloud et les plates-formes Intelligent Edge.
« Nous sommes fermement convaincus que cette collaboration aura un impact sur toutes les grandes industries – consommation, industrie, santé et automobile. Jusqu'à présent, la technologie développée par Microsoft n'était pas largement disponible pour les applications commerciales à grande échelle. Nous pensons que les solutions ADI, optimisées par la technologie d'imagerie de Microsoft, changeront la donne à tous les niveaux », a déclaré Zarola.
Il existe des applications évidentes de systèmes de sécurité pour une reconnaissance faciale améliorée ainsi que des mesures de sécurité avancées pour une automatisation plus efficace des usines. L'industrie 4.0 sera transformée avec des robots collaboratifs travaillant en toute sécurité aux côtés des humains sans être enfermés dans une zone « non humaine » et une optimisation supplémentaire de la logistique sera rendue possible par la précision ToF pour le dimensionnement des boîtes et des palettes.
Zarola a ajouté :« Une détection d'occupation plus sophistiquée conduira à une amélioration de l'efficacité énergétique, des systèmes de sécurité et des interactions homme-machine. De la maison à la voiture, notre collaboration ToF avec Microsoft donnera à de nouvelles expériences de jeu la possibilité de placer et d'interagir avec des objets virtuels dans le monde réel et de changer la façon dont nous interagissons avec nos voitures et d'augmenter la sécurité en surveillant à la fois le conducteur et les passagers. Les cas d'utilisation potentiels de la technologie ToF sont vastes et évolutifs, de sorte que les principales applications d'aujourd'hui devraient être remplacées par de nouvelles idées demain. »
Zarola et Calvo ont expliqué comment leurs clients souhaitent une résolution millimétrique et une résolution spatiale fine sur une large plage de températures. Atteindre ce type de performances nécessite un niveau extrême de synchronisation temporelle atteint à la fois au niveau matériel et logiciel. « Un désalignement de 10ps entre les signaux contrôlant le laser et les pixels du capteur entraîne une erreur de 1,5 mm dans l'estimation de la distance finale. Si cela ne suffisait pas, ajoutez à cela la nécessité de maintenir un système de temps de vol précis sur une large plage de températures qui nécessite des algorithmes de traitement et d'étalonnage avancés qui doivent être conçus conjointement », a déclaré Calvo.
Une critique spécifique des systèmes ToF est la fréquence de modulation à laquelle ils peuvent fonctionner et où l'ADI est le plus concentré. La plupart des sources d'erreurs d'estimation de profondeur ont tendance à être « divisées » par la fréquence de modulation. "Nous visons à augmenter la fréquence de modulation moyenne d'un système ToF qui permettra d'effectuer des mesures avec un bruit de profondeur plus faible et de réduire les effets néfastes du bruit de grenaille à trajets multiples ou de la lumière ambiante", a déclaré Zarola.
Zarola a ajouté :« ADI cherche également à résoudre les principaux défis qui rendent la conception et la production de caméras de profondeur longues et difficiles. Nous prenons en charge l'alignement mécanique, la conception optique, l'étalonnage, la conception électrique et la mise en œuvre du logiciel ainsi que les obstacles traditionnels de la capture d'images. »
La combinaison de la technologie 3D Time-of-Flight (ToF) de Microsoft utilisée dans les appareils de réalité mixte HoloLens et du kit de développement Azure Kinect, avec les solutions personnalisées d'ADI, permettra à la nouvelle génération d'applications hautes performances d'être implémentée et évolutive, tout en optimisation du temps de mise sur le marché.
>> Cet article a été initialement publié le notre site partenaire, EE Times.
Embarqué
- ams pour faciliter la mise en œuvre de la technologie de détection optique 3D
- La plate-forme GNSS améliore la précision de la position
- Les technologies améliorées accéléreront l'acceptation des assistants vocaux
- Les capteurs photoélectriques étendent la distance de détection du temps de vol
- Les capteurs d'images automobiles offrent une plage dynamique améliorée
- Le minuscule capteur d'images 3D utilise la technologie du temps de vol
- Le capteur de pression barométrique offre une précision accrue
- DUAGON-MEN-GROUP intègre OEM Technology Solutions Australia
- Comment la technologie promet de transformer les industries agricoles et alimentaires