


Comparaison des systèmes d'adressage automatique d'accès voiture
Les systèmes d'accès de voiture qui utilisent Bluetooth Low Energy ont généralement un module central et plusieurs modules/nœuds satellites, qui communiquent via un bus CAN (Controller Area Network) ou un réseau d'interconnexion local (LIN). Les modules satellites sont physiquement répartis autour de la voiture pour améliorer la portée de communication Bluetooth.
Les concepteurs de systèmes souhaitent améliorer la fabricabilité des modules satellites en concevant un circuit imprimé avec un logiciel identique afin que l'installation dans la voiture soit indépendante de la position du nœud Bluetooth. Cependant, étant donné que le matériel et le logiciel de chaque nœud satellite au moment de l'installation sont identiques, un schéma est nécessaire pour permettre au module central d'attribuer une adresse CAN ou LIN unique à chaque nœud satellite après l'installation des modules dans le véhicule.
Une option consiste à utiliser un réseau de chaînage LIN dédié pour partager les ID CAN avec les modules pendant la fabrication. Dans ce scénario, le module central utilise l'interface LIN pour adresser chaque module satellite, mais l'interface LIN ne sera pas réutilisée pendant la durée de vie du véhicule. Une autre option remplace le bus LIN dédié par une implémentation discrète qui réduit les coûts de nomenclature. Pour réduire davantage les coûts du système, une véritable option sans fil utilisant uniquement Bluetooth et aucun matériel supplémentaire, réutilise l'infrastructure Bluetooth déjà disponible sur les nœuds pour adresser les modules.
En fin de compte, la méthode sans fil réduit la nomenclature, le câblage du système et les coûts de stockage, de gestion et d'assemblage des composants désormais inutiles. Cet article présente un aperçu des méthodes d'adressage automatique filaire avant d'examiner plus en profondeur la méthode sans fil.
Les systèmes d'accès automobile ont tendance à utiliser Bluetooth Low Energy pour le téléphone en tant que clé ou d'autres fonctionnalités de clé numérique. Ces systèmes fonctionnent de la même manière que les systèmes de démarrage passif à entrée passive, mais ajoutent la possibilité d'utiliser le smartphone du conducteur comme clé, remplaçant ainsi les porte-clés traditionnels. Les véhicules compatibles avec le téléphone en tant que clé mettent en œuvre un module central ou module de clé intelligente et plusieurs modules satellites, chacun capable de recevoir un signal Bluetooth d'un smartphone ou d'un porte-clés. Un système typique peut avoir entre six et 12 modules satellites, en plus du module central (Figure 1).
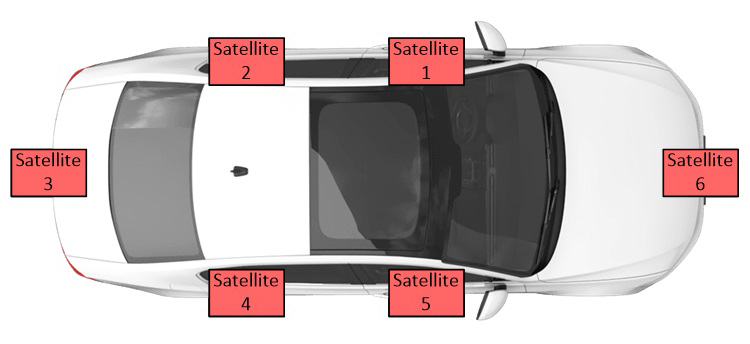
Figure 1. Ce schéma montre où les modules satellites Bluetooth pourraient être distribués dans toute la voiture.
Les consommateurs ont besoin du système de téléphone en tant que clé pour pouvoir déterminer quand le téléphone ou la télécommande se trouve dans la zone de déverrouillage du véhicule. Pour rapprocher l'emplacement du smartphone ou de la télécommande, le système triangule les signaux reçus par divers modules satellites, qui sont répartis dans toute la voiture à des endroits tels que la porte côté passager, le bas de caisse, le coffre ou les pare-chocs.
Le module central du véhicule communique avec les modules satellites à l'aide d'une interface de communication telle que le bus CAN ou le bus LIN. Le module central utilise les données reçues de chaque module satellite pour trianguler l'emplacement du smartphone ou du porte-clés, puis détermine s'il faut autoriser l'accès à la voiture. La figure 2 illustre comment un bus CAN peut être utilisé comme réseau de communication principal entre les modules central et satellite.
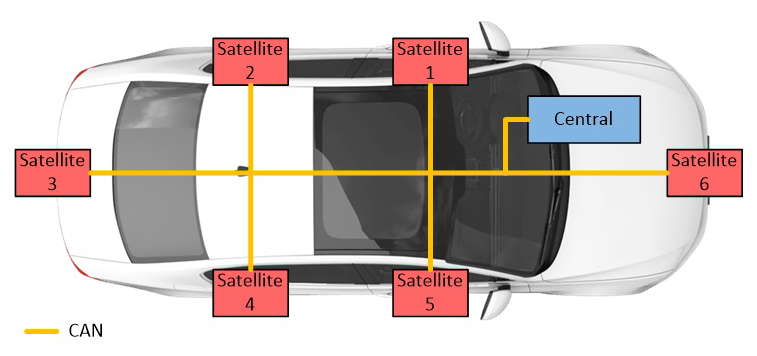
Figure 2. Un bus CAN peut être considéré comme le réseau de communication principal entre les modules central et satellite dans un réseau de système d'accès de voiture Bluetooth.
L'adresse du bus CAN des modules satellites permet au module central de déterminer de quel module satellite il reçoit des données. Le module central associe l'identifiant ou l'adresse CAN unique à l'emplacement de chaque module satellite spécifique, déterminé par la conception globale du système. Plutôt que d'avoir un PCB unique pour chaque module satellite, avec l'adresse de bus câblée ou codée en dur, il serait avantageux d'avoir une seule conception de PCB exécutant une seule version de micrologiciel pour tous les modules satellites. Cela évite les coûts supplémentaires et les problèmes de logistique liés à la fabrication et à la gestion des stocks de six, huit ou plus d'unités presque identiques. Une conception unique simplifie également la fabrication en permettant l'installation du même module satellite n'importe où dans le véhicule.
Étant donné que le matériel et le logiciel des nœuds satellites sont tous identiques et non adressés au moment de l'installation, un schéma est requis qui permet au module central d'attribuer un CAN ID ou une adresse unique à chaque module satellite après l'installation dans l'automobile.
Adressage automatique filaire :méthode de connexion en guirlande LIN
À l'heure actuelle, l'attribution d'adresses de bus CAN aux modules satellites dans les automobiles se fait à l'aide d'un réseau de communication séparé (tel que LIN) avec les satellites connectés en guirlande sur le bus (Figure 3). Le module central envoie une adresse de réseau de bus CAN au premier nœud satellite via le bus LIN. Une fois terminé, le premier nœud satellite enverra la prochaine adresse reçue du module central au deuxième satellite en utilisant le bus LIN. Ce processus se poursuit jusqu'à ce que tous les satellites aient reçu leurs adresses CAN uniques.
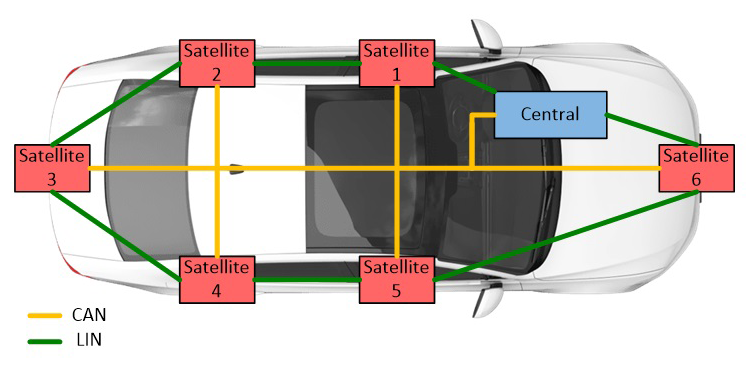
Figure 3. Cette architecture d'adressage automatique utilise une guirlande LIN pour envoyer les identifiants CAN uniques aux satellites.
Ce schéma nécessite deux couches physiques LIN (PHY) par module, une pour recevoir des données et une autre pour transmettre des données. Les PHY LIN ne sont utilisées que pendant l'opération d'adressage automatique. Une fois les satellites programmés, toutes les communications de données standard sont effectuées via le bus CAN d'accès à la voiture. Une automobile typique peut avoir de six à 12 modules satellites, ce qui signifie qu'il faudra de 14 à 26 LIN PHY pour prendre en charge l'opération d'adressage automatique unique, ce qui augmente considérablement la nomenclature de PCB du véhicule, le coût du système et la complexité.
Adressage automatique filaire :méthode à fil unique
Texas Instruments a développé une méthode alternative pour réduire le coût de la nomenclature de chaque module en remplaçant les PHY LIN à adressage automatique dédiés par un MOSFET et quelques résistances. La principale différence dans le logiciel d'adressage automatique de ce schéma est que tous les modules satellites sont programmés pour que le système de puce Bluetooth (SoC) ignore le bus CAN jusqu'à ce qu'un signal de réveil soit reçu sur la ligne P_IN. La figure 4 montre le schéma fonctionnel.
cliquez pour agrandir l'image
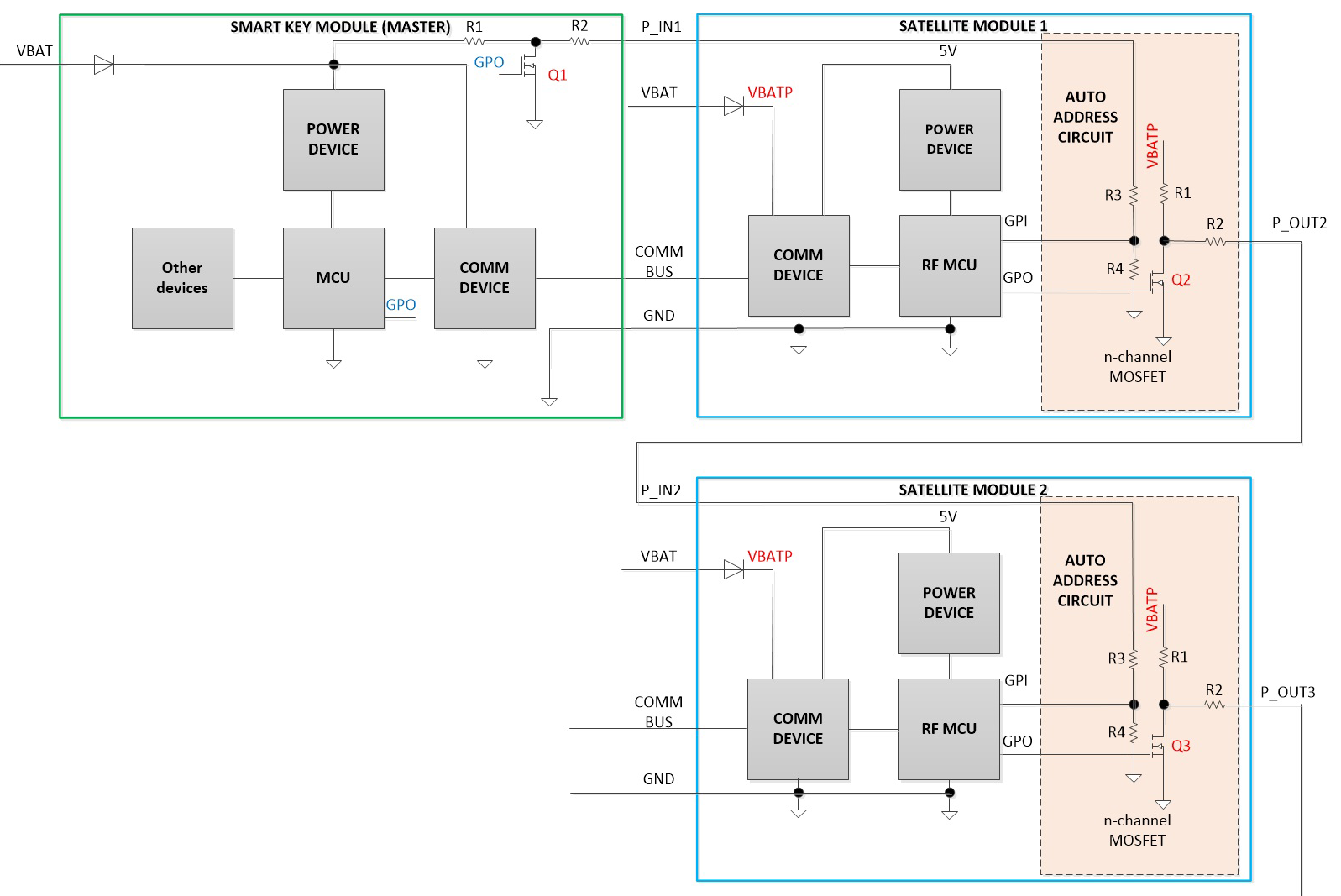 Figure 4. La méthode d'adressage automatique à fil unique remplace les PHY LIN par un MOSFET et quelques résistances.
Figure 4. La méthode d'adressage automatique à fil unique remplace les PHY LIN par un MOSFET et quelques résistances.
Le module central lance le processus d'auto-adressage en envoyant un signal de modulation de largeur d'impulsion (PWM) sur la ligne P_IN1 à l'aide du transistor à effet de champ Q1. Grâce à un diviseur de tension, le premier module satellite reçoit le signal de réveil au niveau de la batterie, P_IN1, signalant au MCU Bluetooth « d'écouter » le bus CAN. En parallèle, le module central commence à transmettre en permanence le premier CAN ID du module satellite sur le bus CAN. Une fois que le premier module satellite reçoit le message CAN ID, il renvoie un message d'accusé de réception au module central pour accuser réception de l'adresse. Après avoir envoyé le message d'accusé de réception, le premier module satellite envoie le signal de réveil PWM au deuxième module satellite, signalant à ce module de commencer à écouter le bus CAN et de recevoir son nouveau CAN ID. Une fois que le module central a reçu le message d'accusé de réception du premier module satellite, le bus CAN transmettra en permanence le message CAN ID du deuxième module satellite jusqu'à ce qu'il reçoive un message d'accusé de réception du deuxième module satellite.
En résumé, chaque module satellite, un par un, réveille le suivant pour recevoir le CAN ID du bus CAN. Le module central incrémente le prochain CAN ID transmis après avoir reçu un message d'accusé de réception du module satellite adressé jusqu'à ce que tous les modules soient adressés*.
Bien qu'il s'agisse d'une amélioration, cette implémentation nécessite toujours un câblage entre le module central et chacun des modules satellites, comme le montre la figure 5.
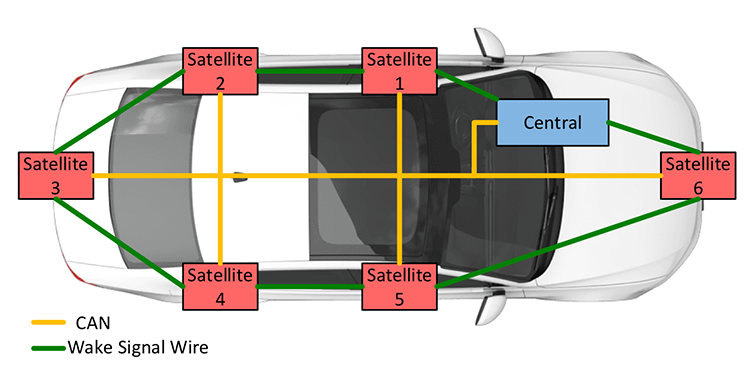
Figure 5. L'architecture d'adressage automatique à fil unique nécessite toujours un câblage entre les modules central et satellite.
Adressage automatique/remplacement de câble sans fil
Texas Instruments a également développé une méthode d'adressage automatique qui utilise des techniques de localisation Bluetooth. Ces techniques permettent d'attribuer aux modules satellites Bluetooth une adresse CAN depuis le module central lors de la fabrication et après le remplacement d'un module. Le processus d'adressage du module commence avec le module déterminé comme étant le plus proche du module central et se poursuit dans l'ordre de la distance la plus proche à la plus éloignée jusqu'à ce que le module le plus éloigné soit adressé. L'emplacement réel n'est pas nécessaire, car le placement des modules, la technique de mesure et l'environnement du module détermineront la distance mesurée. La distance dn représente la distance mesurée (à partir de l'indication de force du signal reçu Bluetooth [RSSI]), idéalement :
d1
Par exemple, la figure 6 montre le schéma fonctionnel et la distance entre chaque module et le module central.
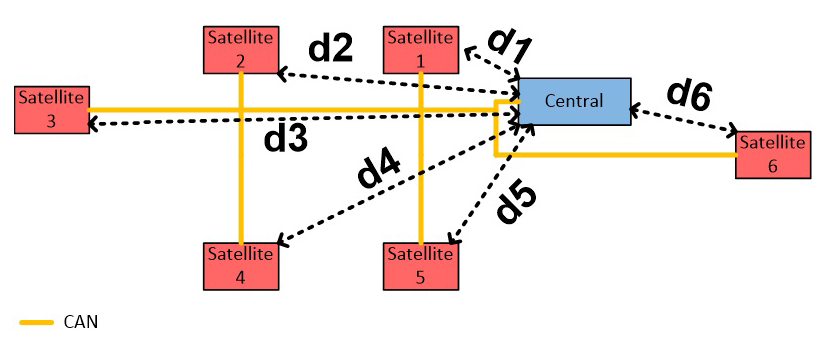
Figure 6. Ce diagramme montre les distances entre chaque module dans la méthode d'adressage automatique sans fil du module central.
En pratique, la distance réelle peut varier de la distance mesurée en raison des caractéristiques de propagation des radiofréquences (RF) de l'espace entre le satellite particulier et le module central. Mais, tant que la distance mesurée à partir de chaque module satellite est cohérente à plusieurs reprises et qu'il n'y a pas de chevauchement entre les distances mesurées à partir de plusieurs modules, le module central peut les traiter correctement sans connaître leur emplacement exact autour du véhicule car les distances mesurées seront toujours dans le même ordre du plus court au plus éloigné. Par conséquent, le module central saura, grâce aux tests préalables, que le premier module est toujours la porte côté conducteur (adresse CAN 1), le deuxième module est toujours le pare-chocs avant (adresse CAN 2), et ainsi de suite.
Afin de garantir que le système d'adressage automatique fonctionnera de manière fiable, des tests minutieux doivent être utilisés pour comprendre les caractéristiques de chaque modèle de véhicule, permettant d'identifier et de résoudre tout problème potentiel. Par exemple, si les mesures de distance du module central entre deux modules satellites non adressés ou plus sont similaires ou égales, un module satellite adressé précédemment peut être utilisé pour localiser les modules non adressés qui n'étaient pas distinguables par le central, comme le montre la Figure 7. Cela peut être fait en utilisant plusieurs modules satellites.
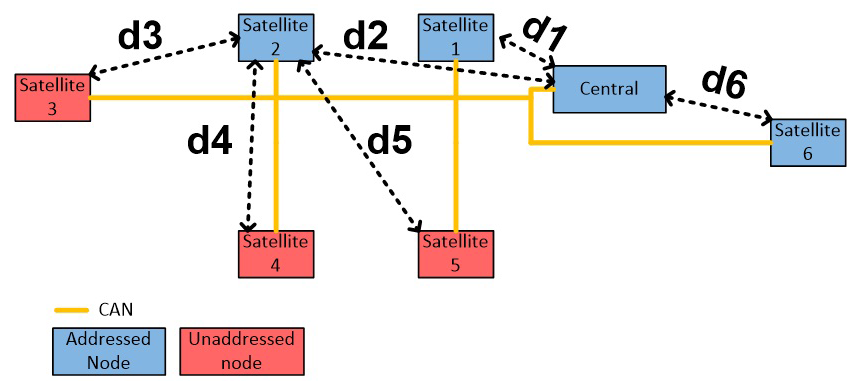
Figure 7. Un module satellite précédemment adressé peut être utilisé pour localiser des modules non adressés qui n'étaient pas distinguables par le maître.
Lorsque le module central est capable de localiser les satellites 1, 2 et 6, mais pas 3, 4 et 5, le module satellite 2 est alors utilisé pour mesurer les distances pour les modules satellites 3, 4 et 5. Encore une fois, tant que les mesures de distance sont cohérentes et il n'y a pas de chevauchement sur les mesures de distance entre les modules, les modules satellites peuvent être adressés correctement et seront toujours adressés dans le même ordre.
Mise en œuvre
Afin d'être cohérent avec la couche de profil d'accès générique (GAP) du protocole Bluetooth Low Energy, nous appellerons le module central un « scanner » et les modules satellites des « annonceurs ». La couche GAP gère les modes d'accès et les procédures de l'appareil, y compris la découverte de l'appareil, l'établissement de la liaison, la terminaison de la liaison, le lancement des fonctions de sécurité et la configuration de l'appareil. Les deux états de l'appareil pertinents pour l'adressage automatique sont :
- Annonceur :l'appareil fait de la publicité avec des données spécifiques indiquant à tout appareil initiateur qu'il s'agit d'un appareil connectable (Remarque :cette annonce contient l'adresse de l'appareil et peut contenir des données supplémentaires telles que le nom de l'appareil).
- Scanner :lors de la réception de la publicité, l'appareil de numérisation envoie une demande de numérisation à l'annonceur.
L'annonceur répond par une réponse d'analyse ; ce processus est appelé découverte de périphérique. Le dispositif de balayage connaît le dispositif publicitaire et peut établir une connexion avec celui-ci. La figure 8 montre le flux de l'annonceur et du scanner ci-dessous.
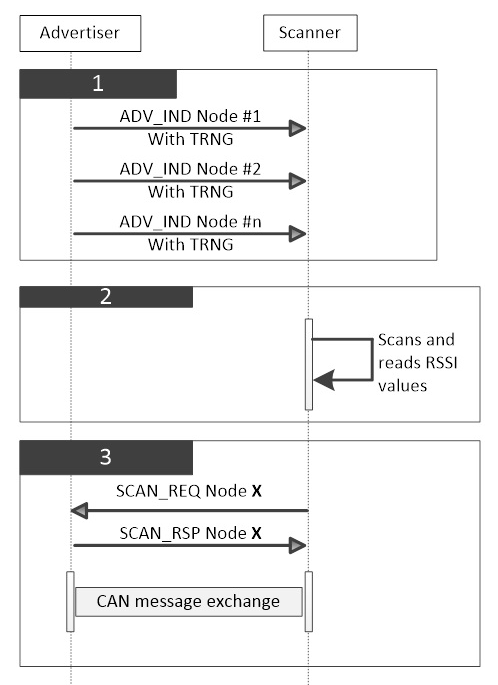
Figure 8. Ce diagramme du logiciel Bluetooth Low Energy montre le flux de l'annonceur et du scanner.
En regardant la figure 8, tous les annonceurs feront de la publicité avec des données spécifiques, ils généreront un véritable nombre aléatoire à utiliser dans le cadre de leurs données publicitaires. Cela garantit aucune duplication de nœud.
Le scanner numérisera plusieurs fois et lira les valeurs RSSI de chacun des annonceurs ; il fera ensuite la moyenne des valeurs RSSI pour déterminer l'annonceur le plus proche.
Le scanner enverra une requête SCAN à l'annonceur le plus proche; il transmettra alors le message CAN d'adressage automatique et attendra l'acquittement du message CAN de l'annonceur.
L'annonceur utilisera SCAN_REQ pour activer l'adresse automatique CAN. Lorsque l'annonceur reçoit le message CAN d'adresse automatique, il enverra le message d'accusé de réception CAN et arrêtera la publicité.
Ces étapes se répètent jusqu'à ce que tous les annonceurs aient été adressés automatiquement.
Résultats
Les tests ont été effectués à l'aide de la conception de référence du module satellite Bluetooth Low Energy + CAN d'accès à la voiture, ainsi qu'un harnais de 12 pieds. La séparation entre chaque connecteur était d'environ 6 pieds (Figure 9).
cliquez pour agrandir l'image
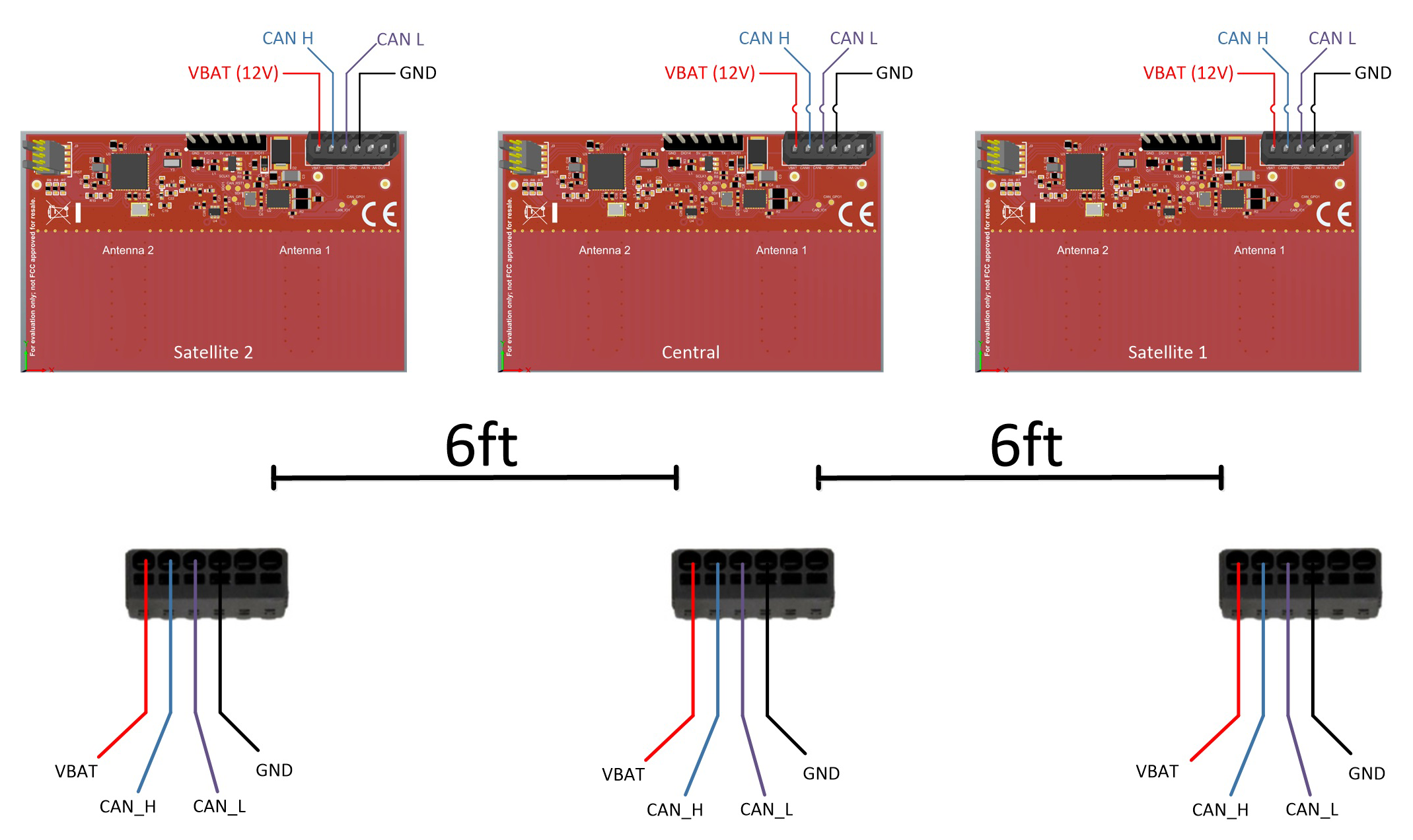
Figure 9. La configuration matérielle pour les tests comprend la conception de référence TIDA-020032.
Et les planches ont été placées comme indiqué sur la figure 10 (où d1 ~4 pi et d2 ~8 pi) :
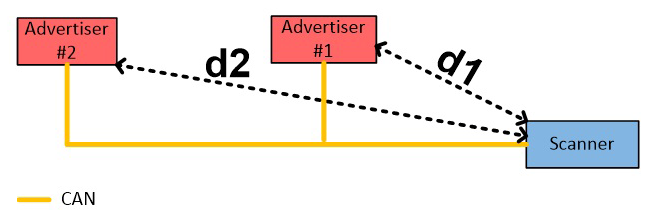
Figure 10. Ce schéma montre l'emplacement du matériel pour les tests.
Les paramètres Bluetooth Low Energy pour le scanner étaient une durée de balayage de 1 s et une fenêtre et un intervalle de balayage de 250 ms. Les paramètres Bluetooth Low Energy des annonceurs ont été publiés pendant un intervalle de 100 ms. Au cours de chaque période de mesure, le scanner a prélevé 10 échantillons RSSI par nœud et a calculé la moyenne de chaque ensemble de mesures pour produire la valeur de distance mesurée de chaque annonceur.
Comparaison de trois schémas d'adressage automatique
Les résultats du test précédent sont résumés dans le tableau 1, qui compare le délai relatif, la fiabilité et les coûts de mise en œuvre de chacune des trois techniques d'adressage automatique décrites dans cet article.
Tableau 1. Comparaison des techniques d'adressage automatique
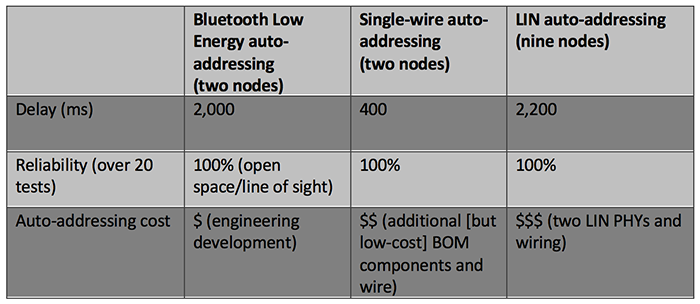
Le tableau 1 compare les résultats de notre test d'adressage Bluetooth Low Energy sans fil avec les deux techniques d'adressage automatique filaire décrites précédemment. D'après ces résultats, il semble que la technique sans fil prend environ 5 fois plus de temps que les techniques filaires. Une réponse meilleure et plus rapide peut être obtenue en affinant davantage les paramètres du réseau Bluetooth Low Energy ; il y a place à amélioration. Cela nécessitera des tests supplémentaires car la distance réelle peut différer de la distance mesurée en raison des caractéristiques de propagation RF associées à l'emplacement particulier de chaque nœud dans le véhicule (c'est-à-dire des défis sans visibilité directe).
L'adressage automatique sans fil est la solution la plus économique du point de vue des matériaux, ne nécessitant aucun matériel supplémentaire ni câblage supplémentaire entre les modules. Cependant, afin de profiter de ces avantages, les concepteurs de systèmes devront effectuer des tests pour fournir les performances RF afin d'optimiser le logiciel et de tenir compte des inexactitudes. Si vous préférez une approche filaire, la méthode d'adressage automatique filaire de TI nécessite l'ajout de quelques composants petits et peu coûteux à la nomenclature, ainsi que des fils connectés entre chaque module. Ensemble, ils fournissent un ensemble d'options lors du choix d'une méthode pour mettre en œuvre des capacités d'adressage automatique pour les systèmes d'accès de voiture Bluetooth.
* Pour plus de détails et les résultats des tests sur la méthode d'adressage automatique à fil unique, consultez le guide de conception de référence du module satellite Bluetooth Low Energy + CAN d'accès voiture de Texas Instruments.
Références
- Spécifications de base Bluetooth
- La norme de connexion établit de nouvelles normes de sécurité, Bluetooth SIG
>> Cet article a été initialement publié le notre site frère, EDN.
Embarqué
- Constructeur C#
- Classe imbriquée C#
- Surcharge du constructeur C#
- Concevoir avec Bluetooth Mesh :puce ou module ?
- Cervoz :DDR4 très bas profil SO-DIMM
- La puce à bande ultra-large permet l'accès aux véhicules depuis un smartphone
- Petit module Bluetooth 5.0 intégrant une antenne à puce
- Petit module d'IA basé sur Google Edge TPU
- Le module frontal simplifie la conception du WI-Fi 6