


rDUINOScope
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |
À propos de ce projet


Descriptif
Le premier télescope autonome au monde basé sur Arduino à contrôler Goto.
Toutes les commandes de télescope open source disponibles utilisent soit Raspberry Pi, qui consomme beaucoup d'énergie, soit Arduino comme extension d'un ordinateur, d'un smartphone ou d'une tablette. rDUINOScope est le premier appareil autonome basé sur Arduino permettant aux astronomes amateurs de profiter du ciel nocturne.
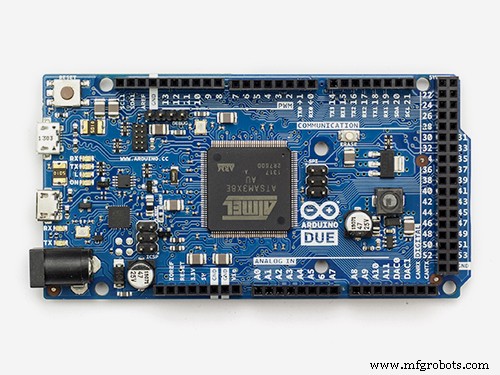
L'idée initiale était de créer une alternative bon marché et facile à construire des produits GOTO disponibles dans le commerce comme ceux fabriqués par SkyWatcher, Orion, Vixen et d'autres. Ainsi l'architecture matérielle est construite sur une carte Arduino DUE et des capteurs bon marché disponibles sur le marché. Instructions sur comment construire et guide de l'utilisateur ont été créés sur le site Web du projet. Au cœur du système se trouve une carte Arduino DUE, chargée de logiciels constamment développés pour ajouter des fonctionnalités.
rDUINOscope avec Stellarium :
Détails
rDUINOScope est un système de contrôle de télescope open source basé sur Arduino Due (GOTO). Conçu comme un système autonome, rDUINOScope n'a pas besoin d'un PC, d'une tablette ou d'un téléphone portable, ni d'une connexion Internet pour fonctionner et offrir une vue imprenable !
Fondamentalement, il a une base de données avec LES 250 MEILLEURS objets stellaires (Catalogues Messier et Hidden Treasures) et 200 étoiles , calcule leur position sur le ciel et pointe le télescope. Les procédures d'alignement mises en œuvre permettent une expérience "toujours dans l'oculaire" lors de l'orientation vers des objets sélectionnés et une fois que l'objet est dans l'oculaire, le système continue de le suivre.
Au cas où, toutefois, vous voudriez profiter de vos appareils électroniques, #rDUINOScope utilise la communication Bluetooth (configuration sans fil) pour se connecter à tous les appareils électroniques et accepter les commandes basées sur le protocole de communication MEADE LX200.
Le système fonctionne avec des moteurs pas à pas de tous types et peut être monté sur des supports de bricolage ou sur des produits disponibles dans le commerce tels que SkyWatcher, MEADE, Orion, Vixen, etc.
Fonctionnalité :
Qu'y a-t-il à l'intérieur du rDUINO SCOPE ?
rDUINOScope Github
Instructions de construction
ÉTAPE 1 Préparation
Avant de commencer, il est important que vous compreniez le fonctionnement du logiciel afin de pouvoir apporter des modifications et le personnaliser pour vous. Après tout, c'est l'un des points forts de ce projet !
Pour comprendre cette partie, vous devez télécharger le code à partir des fichiers du projet, ainsi que les fichiers "bibliothèques" ... ou simplement télécharger l'ensemble du package à partir de : http://rduinoscope.co.nf/downloads.php . Tous les numéros de ligne référencés sont conformes au code de V2.1. Boiana EQ
Vous devez savoir comment fonctionne le code Arduino. Habituellement, le programme Arduino a 2 sections - SETUP (); et BOUCLE(); SETUP() est exécuté au début du programme et utilise essentiellement le système ; LOOP() est une fonction de boucle constante qui se déclenche plusieurs fois par seconde. Ainsi, afin de nous assurer que nous avons des écrans, des entrées tactiles, etc. et que l'écran ne scintille pas à cause de la LOOP(), nous devons inventer un mécanisme pour faire savoir à Arduino ce que l'utilisateur attend de lui. Ainsi, dans la section LOOP(), vous verrez une très petite partie du code qui dit seulement "Considérer le toucher.. ou considérer le temps ..." et etc. Le reste des activités se déroule dans ces fonctions, ce qui nous permet de modifier le déroulement du programme afin que les écrans ne soient pas rafraîchis plusieurs fois par seconde.
Calculs :J'ai utilisé des informations trouvées sur Internet sur la façon de calculer la position des objets stellaires. La plupart des informations que j'ai recueillies à partir du lien suivant :http://www.stargazing.net/kepler/altaz.html - Décrit les formules et l'approche nécessaires pour calculer l'angle horaire (HA), connaître l'emplacement, l'heure actuelle et l'objet stellaire RA et DÉC.
Une fois que j'ai créé le code pour calculer HA /row 678 :void calculateLST_HA() / , j'ai utilisé cette page pour vérifier si cela fonctionne :http://www.jgiesen.de/astro/astroJS/siderealClock/ , et plus tard, lorsque j'ai ajouté la base de données avec Messier Objects, j'ai utilisé Stellarium (http:// www.stellarium.org/) demande les mêmes chèques.
Le principal problème que j'ai trouvé n'était pas les formules elles-mêmes, mais la façon dont Arduino traite les types de variables et en particulier la précision des calculs.
Maintenant, une fois que nous avons calculé la HA et la DEC pour un objet donné, nous voulons que la monture pointe le télescope et pour ce faire, nous devons savoir de combien exactement les moteurs doivent tourner. Pour y parvenir, j'ai besoin de savoir quel est le rapport vis sans fin sur engrenage, c'est-à-dire combien de tours la vis sans fin doit-elle faire pour que l'engrenage fasse 360 °. J'ai Vixen Super Polaris et une recherche rapide sur Internet a révélé qu'il utilise un engrenage à 144 dents pour les arbres RA et DEC. J'ai créé un simple fichier Excel (*.XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx) pour calculer combien les moteurs doivent tourner une fois que j'ai calculé HA et DEC, et aussi à quelle fréquence "tirer " moteurs afin de compenser la rotation de la Terre.
Gears_Stepper_Calculation.xlsxLe même modèle mathématique que j'ai utilisé dans le XLS est également implémenté dans le code, vous devez donc simplement substituer les valeurs de votre monture au début du code (lignes 34 à 37).
// VOICI LES informations sur la monture, les engrenages et l'entraînement.// ... utilisé pour calculer le rapport HourAngle sur microSteps// METTRE À JOUR CETTE PARTIE en fonction de votre SET-UP// ------ -----------------------------------------------------// NB :RA et DEC utilisent le même matos ratio (144 dent dans mon cas)!//---------------------------------------- -------int VER =144;int RÉDUCTEUR =4; // démultiplication 1:4int DRIVE_STP =200; // Le moteur pas à pas a 200 pas par révolution MICROSpas =16; // J'utiliserai le mode 1/16 micropas pour conduire sidéral - détermine également la vitesse LA PLUS BASSE. Maintenant, une fois que nous avons calculé les rapports, le code saura de combien faire tourner les moteurs afin de pointer le télescope vers les coordonnées correspondantes et aussi quelle est la vitesse d'horloge pour que la monture puisse suivre l'objet. Les fonctions prenant en charge ce qui précède commencent à la ligne 906 et à la ligne 917 :
void Sidereal_rate(){}void cosiderSlewTo(){} Considérations :Vous savez, ce n'est pas un produit prêt à l'emploi. Il vous permet de le personnaliser en fonction de vos besoins et est donc très flexible, mais cette flexibilité présente certains inconvénients. J'ai inclus cette section « considérations » afin de m'assurer qu'elles ne sont pas supprimées de votre liste de tâches.
- Montage des moteurs est une tâche simple, qui a cependant un impact sur la façon dont vos calculs devraient fonctionner. Dans mon scénario, Vixen Super Polaris a ses engrenages d'origine placés sur le côté droit de l'arbre à vis sans fin. J'ai cependant trouvé que ces arbres étaient courts afin de remplacer les engrenages par des poulies et j'ai donc déplacé les poulies du côté opposé de l'arbre (à gauche). Cela a fait que le moteur doit en fait tourner vers l'arrière afin d'augmenter la position du télescope et j'ai donc dû réviser le code d'origine que j'avais créé. Vous devez absolument revoir les directions dans lesquelles vos moteurs tournent, sinon vous vous retrouverez avec un mauvais comptage des pas, donc une mauvaise position. Laissez-moi vous montrer ce que je veux dire :voir la ligne 1028 où je commande le moteur à STP_BACK, mais à la ligne 1031 j'augmente le compteur +=... (Tous les numéros de ligne référencés sont conformes au code de V2.1. Boiana EQ ).
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,HIGH); digitalWrite(RA_STP,LOW); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,HIGH); digitalWrite(RA_STP,LOW); RA_microSteps -=RA_mode_steps;} ACTION : Révisez les parties suivantes du code :void consider_Manual_Moveint xP, int yP ), void cosiderSlewTo() et void Sidereal_rate().
- Nord VS. Sud Hémisphères :Le code inverse également le mouvement AVANT en fonction de l'hémisphère dans lequel vous vous trouvez. Cela se fait dans une partie du code, où je m'occupe des entrées tactiles. Vous devrez peut-être réviser la section du code.
- Engrenages sur axes DEC et RA :Mon code fonctionne en supposant que les axes DEC et RA utilisent un engrenage à 144 dents. C'est le cas de Vixen Super Polaris. Si vous avez une configuration différente, vous devrez peut-être réviser certaines parties du code. Si vous rencontrez des problèmes pour identifier ces parties du code, envoyez-moi un message et j'essaierai de vous aider !
Planifiez vos activités : Nous avons maintenant atteint un point où nous devons planifier nos activités pour construire réellement le système rDUINO Scope GoTo. L'estimation approximative est que vous devriez être en mesure de terminer le système en 2-3 jours étant donné que vous avez tout le nécessaire (matériel, outils et matériaux). Il m'a fallu environ 4 à 5 mois pour le terminer, étant donné que je ne pouvais travailler que la nuit (pas toutes les nuits), et que je devais également faire beaucoup de recherches. Tout mettre ensemble m'a pris comme :
- 1 jour pour créer la carte Shield et faire fonctionner le système
- 1 jour pour tout emballer dans une boîte
- 1 jour pour fixer les moteurs et les poulies au support
ÉTAPE 2 Matériaux
Maintenant, comme nous savons comment fonctionne le programme, vous devez planifier vos achats et obtenir les matériaux nécessaires.
Bill of Materials :La plupart des matériaux que j'ai utilisés sont achetés auprès de fournisseurs chinois sur Internet. Peu d'entre eux cependant j'ai décidé d'acheter localement principalement parce qu'ils étaient considérés comme bons à avoir et que je voulais éviter les retards :GPS, Bluetooth et Joystick. Cela m'a coûté environ 190 USD pour obtenir tout cela, c'est donc vraiment un faible coût par rapport au coût d'achat d'un tel système auprès des fabricants. Vous pouvez trouver la liste des matériaux avec leurs prix et où les acheter sur le site du projet :http://rduinoscope.co.nf/rDUINO_step2.html, mais la liste est également disponible sur ce site dans la section "COMPOSANTS" .
Si vous pouvez les trouver moins chers ou les livrer plus rapidement, je vous suggère fortement de le faire.
De plus, selon votre conception, vous pourriez avoir besoin de 40 broches. câble avec connecteurs pour le TFT, quelques boulons en plastique pour fixer le joystick, câble USB pour s'assurer que l'Arduino Due est toujours programmable lorsqu'il est enfermé dans la boîte, ventilateur et autres.
Si vous n'en avez pas à la maison (comme je n'en ai pas), vous devriez également acheter du matériel de soudure, de la soudure, des pinces, un multimètre numérique et autres.
Logiciel dont vous aurez besoin :Une partie importante de la construction de votre rDUINOScope consiste à télécharger et à installer l'IDE Arduino et tous les logiciels associés (pilotes, définitions de cartes et bibliothèques). Suivez la liste ci-dessous afin d'installer nécessaire sur votre ordinateur :
- Accédez au site Web Arduino et téléchargez l'IDE :https://www.arduino.cc/en/Main/Software. Installez le logiciel - Une fois le logiciel installé, il installera également les pilotes nécessaires pour que votre ordinateur reconnaisse la carte Arduino lorsqu'il est connecté.
- Exécutez l'IDE Arduino et accédez à :Outils -> Conseil -> Gestionnaire de tableaux , une fois là-bas, téléchargez et installez la définition de la carte Arduino Due "Cartes Arduino SAM (32 bits ARM Cortex-M3)" ;
- Téléchargez le pack de bibliothèques que j'ai utilisé dans le cadre du programme et copiez-les-collez dans le dossier « bibliothèques » de votre installation Arduino IDE. (REMARQUE :"libraries" est un dossier sur votre ordinateur, mais c'est également un dossier dans le PACK COMPLET disponible sur le site Web du projet : http://rduinoscope.co.nf/downloads.php , vous devez donc télécharger le pack, renommer l'extension en .ZIP, l'ouvrir et copier le contenu du dossier "_libraries" du ZIP vers le dossier "libraries" de votre ordinateur.)
- Redémarrez l'IDE et ouvrez le fichier principal du programme - "_02_Boiana_EQ.ino". Vous remarquerez que 4 autres fichiers s'ouvriront dans des onglets séparés. Ce sont des fichiers de support prenant en charge différentes parties du logiciel.
Vous devriez maintenant pouvoir compiler le code et le charger sur la carte Arduino Due après avoir connecté Arduino à votre ordinateur.
Remarque : Si vous ne savez pas comment fonctionne l'IDE Arduino et ce qui doit être fait pour programmer Arduino, reportez-vous au site Web et aux didacticiels :https://www.arduino.cc/en/Tutorial/HomePage
ÉTAPE 3 Assemblage
Pour des instructions plus détaillées, veuillez visiter le site Web du projet :http://rduinoscope.co.nf/rDUINO_step3.html
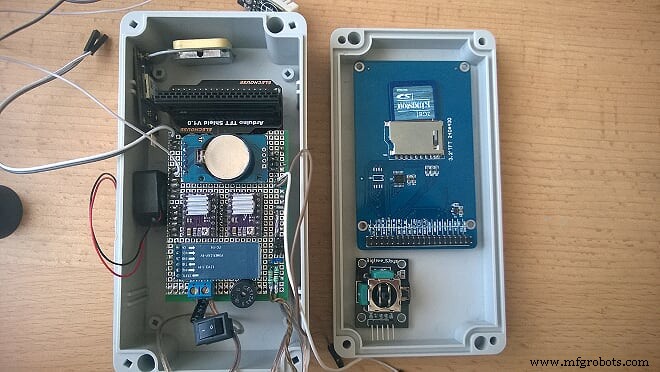
Il est maintenant temps de créer le tableau Shield. Une carte Shield est une carte avec des brochages que vous empilez sur la carte ArduinoDUE. Certains des composants doivent être sur cette carte et certains sont mieux positionnés sur le boîtier du boîtier. Mon partage est le suivant :
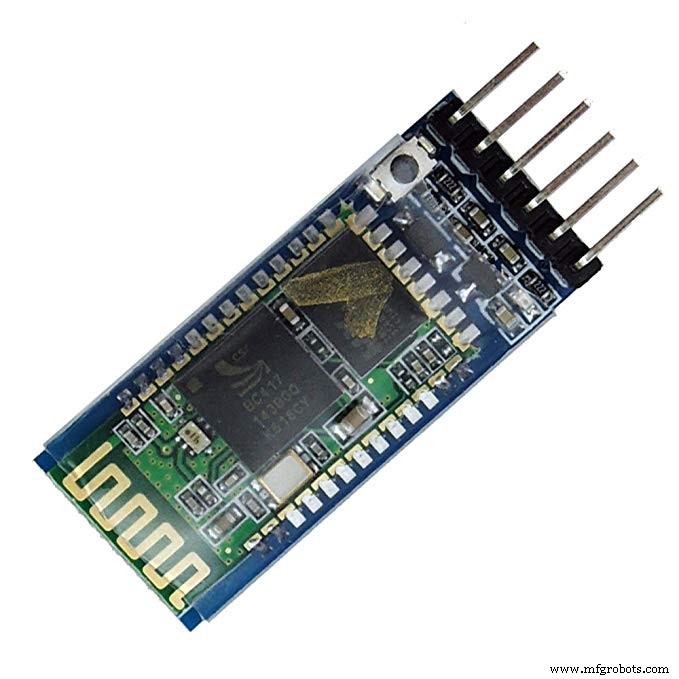
- Maintien de la carte de blindage :les deux lecteurs DRV8825, horloge RTC3231, module Bluetooth HC-05, haut-parleur piézo, connecteur pour 12 V et brochage pour les autres composants ;
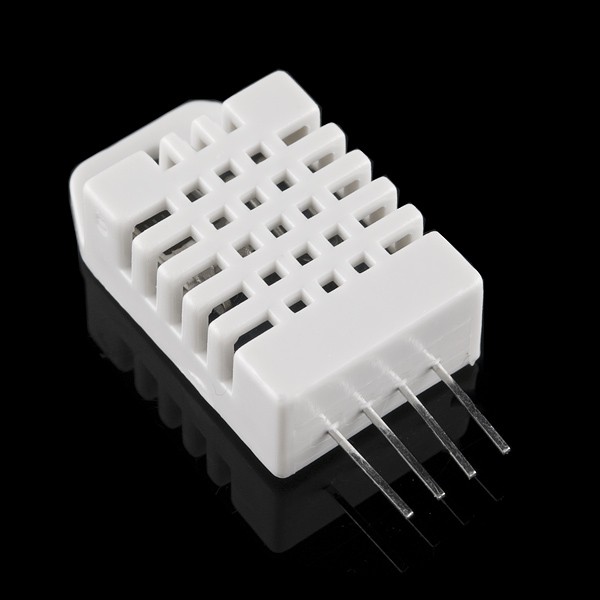
- Les composants du boîtier sont :Module GPS NEO 6M - RX pour que l'antenne puisse toujours pointer vers le ciel, capteur de température DHT22 collé à l'extérieur du boîtier à travers un trou, Joystick PS2, l'écran TFT et tous les interrupteurs (ON Commutateur /OFF et commutateur Mode jour/nuit). De plus, j'ai percé des trous pour les connecteurs Motor Drives, le connecteur d'alimentation 12 V et un port de câble USB qui va au port natif ArduinoDUE pour permettre les mises à jour du logiciel sans ouvrir la boîte.
Comment connecter des composants à la carte ARDUINO DUE :
Composant .... Broche matérielle .... Broche Arduino
GPS
- GPS NEO 6M .... RX .... 16
- GPS NEO 6M .... TX .... 17
RTC
- RTC DS3231 .... SDA .... A4
- RTC DS3231 .... SCL .... A5
Bluetooth
- BT HC-05 .... TXD .... 14
- BT HC-05 .... RXD .... 15
DHT
- DHT22 .... out .... 3
Orateur
- Enceinte piézo.... 2
PS2
- Manette PS2 .... VRx .... A1
- Manette PS2 ....VRy ....A0
Déclinaison DRV8825
- DEC DRV8825 .... ETAPE .... 6
- DEC DRV8825 .... DIR .... 7
- DEC DRV8825 .... M0 .... 10
- DEC DRV8825 .... M1 .... 9
- DEC DRV8825 .... M2 .... 8
- DEC DRV8825 .... REINITIALISER DEC DRV8825 .... SLEEP
Ascension à droite DRV8825
- RA DRV8825 .... ETAPE .... 4
- RA DRV8825 .... DIR .... 5
- 3V
- RA DRV8825 .... M0 .... 11
- RA DRV8825 .... M1 .... 13
- RA DRV8825 .... M2 .... 12
- RA DRV8825 .... REINITIALISER RA DRV8825 .... SOMMEIL
Écran TFT
- utiliser avec TFT Shield.... broches (22-53) + SPI
- Jour/Nuit .... Commutateur de mode .... A3
Bien... Nous sommes maintenant prêts à assembler le Shield Board. Procurez-vous un PCB de prototypage et évaluez comment le couper, afin qu'il puisse contenir tous les composants pour avoir de la place pour le câblage et que les brochages soient soudés de manière à pouvoir être empilés sur Arduino. Veuillez noter que vous devez souder toutes les broches utilisées par Arduino et les connecter soit aux composants de la carte de blindage, soit à un connecteur de cette carte de blindage afin que les composants placés sur la boîte elle-même puissent également être connectés.
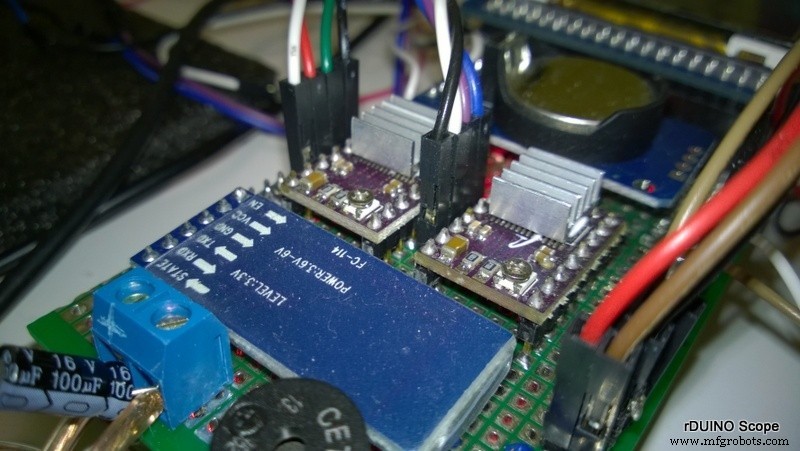
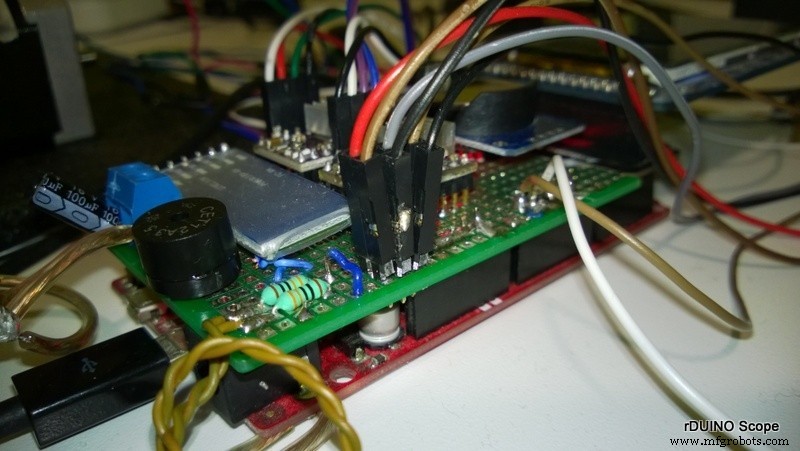
J'inclus ci-dessous quelques photos du processus :
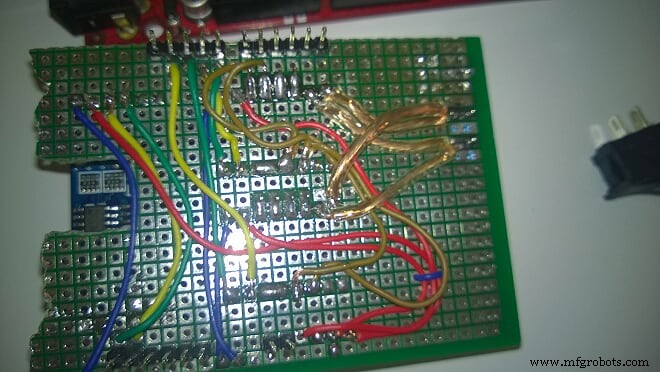

Une fois ceux-ci terminés, j'ai connecté la carte et testé le blindage ! Cela ne fonctionnait pas ! :( J'ai vérifié le câblage et il s'est avéré que j'avais créé un pont entre 2 connexions et que je devais le réparer. Veuillez noter qu'à partir de ce moment, j'ai commencé à vérifier chaque soudure pour les problèmes car j'ai vraiment eu de la chance de ne pas graver mon Arduino ou quoi que ce soit d'autre avec le mauvais câblage. NB :Assurez-vous de vérifier toutes les connexions ! Assurez-vous de suivre le schéma de câblage suivant pour le DRV8825 et les entraînements à moteur car il est important.
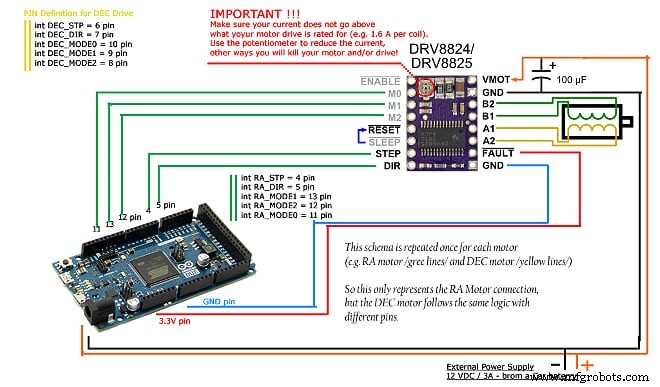
Assurez-vous d'utiliser un adaptateur d'alimentation approprié (12 V, 1,6 A) et connectez les entraînements du moteur avant la mise sous tension ! NB :Ne connectez jamais les variateurs de vitesse lorsque le DRV8825 est en charge car cela pourrait brûler les pilotes !
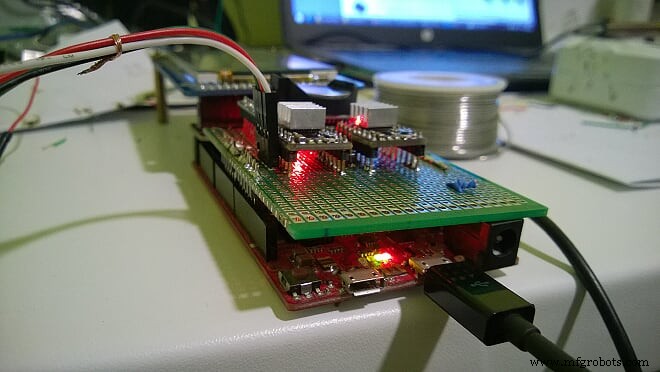
Maintenant que tous les composants sont soudés en place, je vous suggère également de connecter les moteurs, de charger le logiciel sur la carte Arduino et de tester l'ensemble de la configuration. Cela devrait fonctionner sans problème à ce stade.
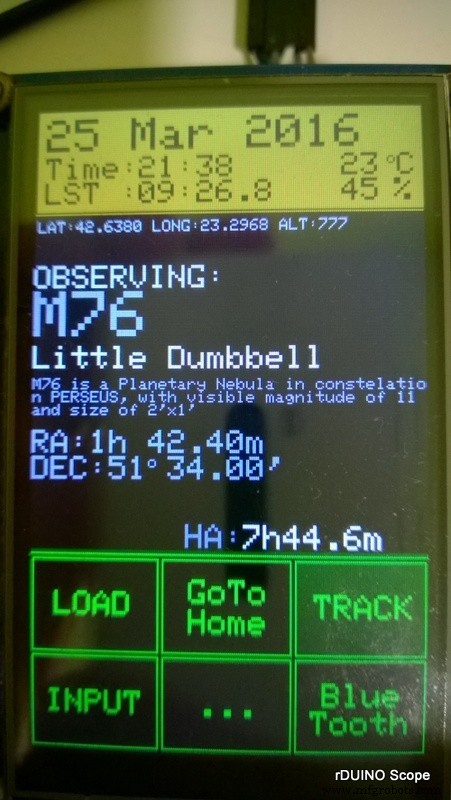
Vous devriez maintenant être capable de jouer avec le logiciel et de vous familiariser avec l'interface utilisateur. Afin d'aider avec l'interface j'ai créé une page GUIDE DE L'UTILISATEUR sur le site du projet :http://rduinoscope.co.nf/guide.html
Votre configuration devrait ressembler à ceci :

ÉTAPE 4 Emballez-le ensemble
Une fois que le panneau de blindage est prêt, prenez la boîte et commencez à disposer tous les composants restants et planifiez où vous devez percer des trous et quelle forme et taille. La meilleure façon de percer des trous est d'utiliser un petit couteau de poche (du moins pour moi). Peu importe qu'il s'agisse d'un trou rond ou carré. Vous pouvez facilement le découper avec un petit couteau tranchant.
La seule exception est pour l'écran où vous avez vraiment besoin d'un trou long, régulier et carré. J'ai demandé de l'aide et mon père l'a fait sur ses machines de découpe.
Une fois que vous êtes satisfait de la disposition et que vous la considérez comme faisable, commencez à découper les trous. C'est un long processus et crée du désordre, mais ne devrait pas vous prendre plus de 2-3 heures. Parfois j'utilisais des perceuses quand je devais faire des trous cerclés, par exemple :connecteur d'alimentation 12V, connecteurs moteur RA et DEC.
Préparez votre pistolet à colle chaude et commencez à coller les composants sur la boîte comme indiqué ci-dessous :




Maintenant tout est connecté et emboîté, à l'exception du composant sur la face avant du coffret. J'ai décidé d'y mettre l'écran TFT, le joystick PS2 et le switch Mode Jour/Nuit. Lorsque je suis arrivé à l'écran TFT, j'ai créé une simple connexion par câble plat avec des connecteurs mâles et femelles et je l'ai accrochée à l'écran. Cela n'a cependant pas fonctionné! La raison en est que les broches ont été mises en miroir et que l'écran TFT ne peut donc plus fonctionner. J'ai donc décidé de travailler sur des conversions 2D en 3D compliquées et de déterminer les connecteurs que j'avais avec le câble plat afin de résoudre le problème
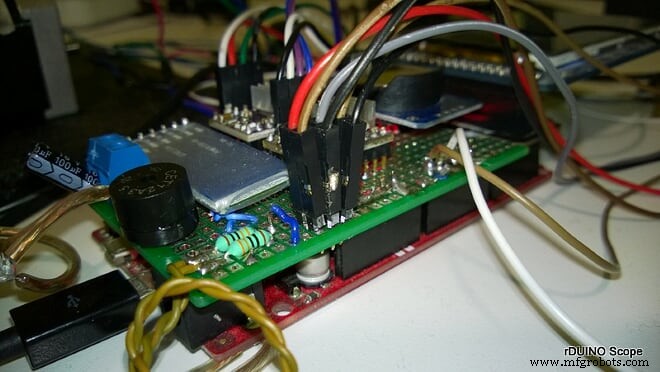
Longue histoire, courte : Ce n'est pas sorcier, mais cela m'a donné des moments difficiles jusqu'à ce que je trouve une solution. Une solution laide, mais cela a fonctionné et cela fonctionne toujours un an plus tard. Ci-dessous, vous pouvez voir ce que je veux dire.
Fondamentalement, ce que vous voyez ici est :
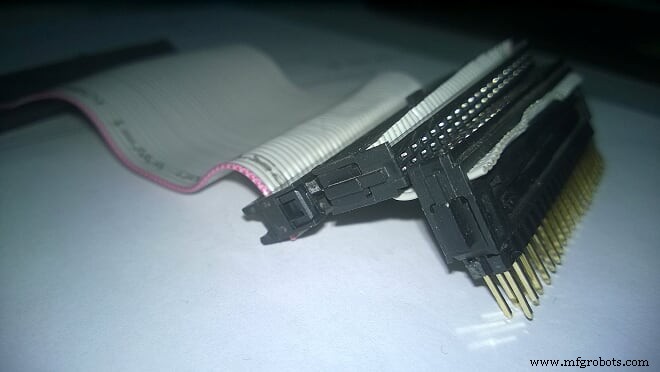

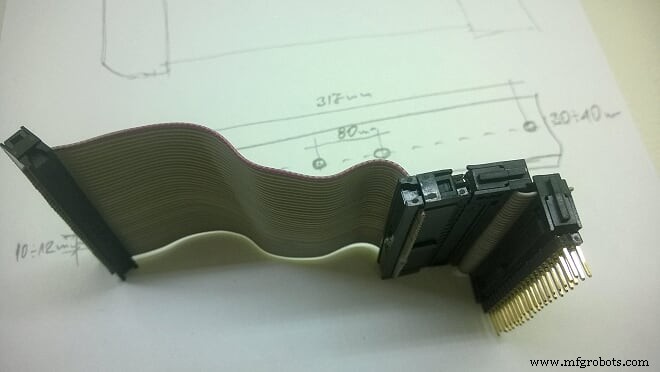
- Câble ruban
- Connecteurs femelles 40 broches
- broches à souder sur un circuit imprimé découpées pour former une matrice (2 x 20 broches)
Cela a fonctionné comme un charme et m'a permis de compléter la boîte !






ÉTAPE 5 La monture équatoriale allemande
Maintenant, même si je veux partager avec vous comment connecter les moteurs à votre monture, je ne peux pas. La vérité est que tout fabricant crée son propre design et en tant que tel, il n'y a pas de solution qui fonctionne pour tous.
J'utilise Vixen Super Polaris des années 80 et la méthode ci-dessous fonctionne pour cela. Je dois vous rappeler que les décisions que vous avez prises à l' ÉTAPE 1 où vous deviez modifier les valeurs dans le code affectera désormais notre travail. Ci-dessous, vous pouvez voir ma configuration de poulies et de courroies.
J'ai acheté 2 ensembles pour ma configuration. Je ne savais tout simplement pas comment cela fonctionnerait et j'ai donc acheté un ensemble avec réduction 1:4 et un ensemble avec réduction 1:3. La taille de la courroie doit également être différente car la réduction affecte la distance entre les deux poulies. J'admets qu'avec une bonne planification et une bonne conception, vous pouvez décider à l'avance comment procéder et économiser de l'argent, mais j'étais pressé. J'avais besoin de le faire fonctionner !

Après avoir eu les courroies, les poulies et le support devant moi, j'ai décidé que la meilleure approche pour moi serait d'utiliser une réduction de 1:4 car tout semblait parfaitement s'adapter sur le support et j'ai commencé à travailler sur le carter du moteur. Après une demi-journée, j'ai pu trouver ceci :
J'ai testé l'ensemble de la configuration et j'ai dû apporter quelques modifications au logiciel (mettre à jour les valeurs des variables à 4 sur la ligne 35) afin qu'il représente ma décision de conception finale. Je l'ai testé à nouveau et tout a fonctionné comme un charme.


J'ai dû attendre une bonne nuit étoilée pour le tester correctement, mais en attendant, je me suis rendu compte que quelque chose n'allait pas !
J'avais le meilleur système Telescope Control GOTO, bien meilleur que ce que je peux acheter avec mon budget de loisir, mais ça n'avait pas l'air bien. Il fallait quelques touches finales, quelque chose qui m'a rendu plus tard fier de mon rDUINOScope !
Enfin, mon rDUINOScope Vixen SP Ferrari ressemble à ce qu'il devrait être !


Fichiers
_READ_ME.txt :Description de la version finale v.2.1 Boiana EQ avec quelques F.A.Q.
_READ_ME.txt_02_Boiana_EQ.ino :fichier principal Arduino
_02_Boiana_EQ.inographic_screens.ino :FICHIER GRAPHIQUE - lié au fichier principal
écrans_graphiques.inotouch_inputs.ino :FICHIER D'ENTRÉES TOUCH - lié au fichier principal
touch_inputs.inoBT.ino :BLUETOOTH COMMUNNICATION - lié au fichier principal
BT.inoregular_updates.ino :TIME UPDATES - lié au fichier principal
regular_updates.ino
Code
- Extrait de code n° 1
- Extrait de code 3
Extrait de code n°1Texte brut
// VOICI LES informations sur la monture, les engrenages et l'entraînement.// ... utilisé pour calculer le rapport HourAngle à microSteps// METTRE À JOUR CETTE PARTIE en fonction de votre SET-UP// --------- ------------------------------------// NB :RA et DEC utilisent le même rapport de démultiplication (144 dent dans mon cas)!//------------------------------------------ ----int VER =144;int RÉDUCTEUR =4; // démultiplication 1:4int DRIVE_STP =200; // Le moteur pas à pas a 200 pas par révolution MICROSpas =16; // J'utiliserai le mode 1/16 micropas pour conduire sidéral - détermine également la vitesse LA PLUS BASSE.
Extrait de code n°3C/C++
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,HIGH); digitalWrite(RA_STP,LOW); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,HIGH); digitalWrite(RA_STP,LOW); RA_microSteps -=RA_mode_steps;} Github
https://github.com/dEskoG/rDUINOScopehttps://github.com/dEskoG/rDUINOScopeSchémas
Comment câbler les moteurs pas à pas et le DRV8825 et les connecter à Arduino DUE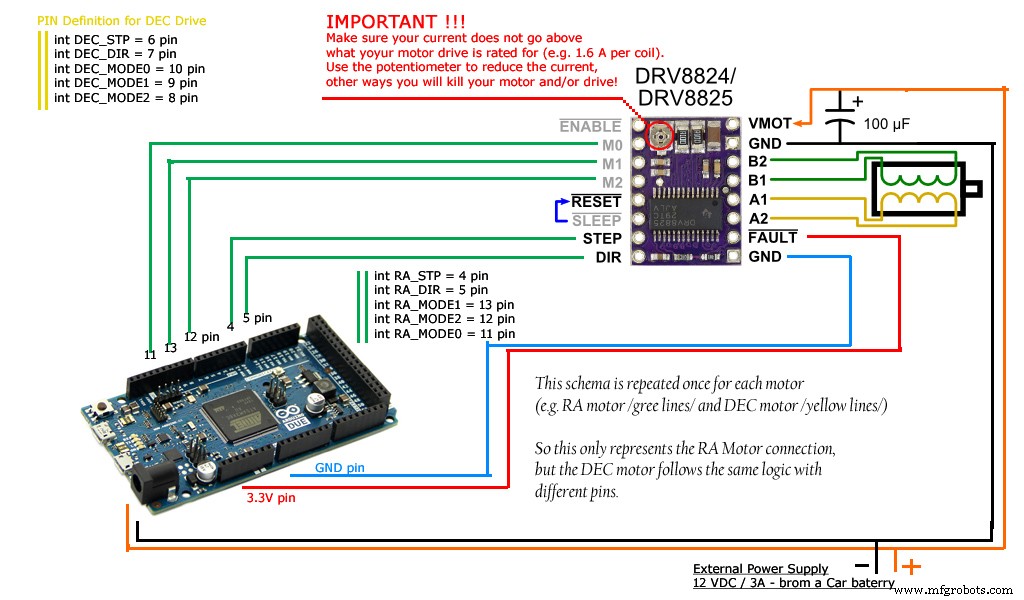 Comment câbler tous les capteurs et se connecter à Arduino DUE
Comment câbler tous les capteurs et se connecter à Arduino DUE 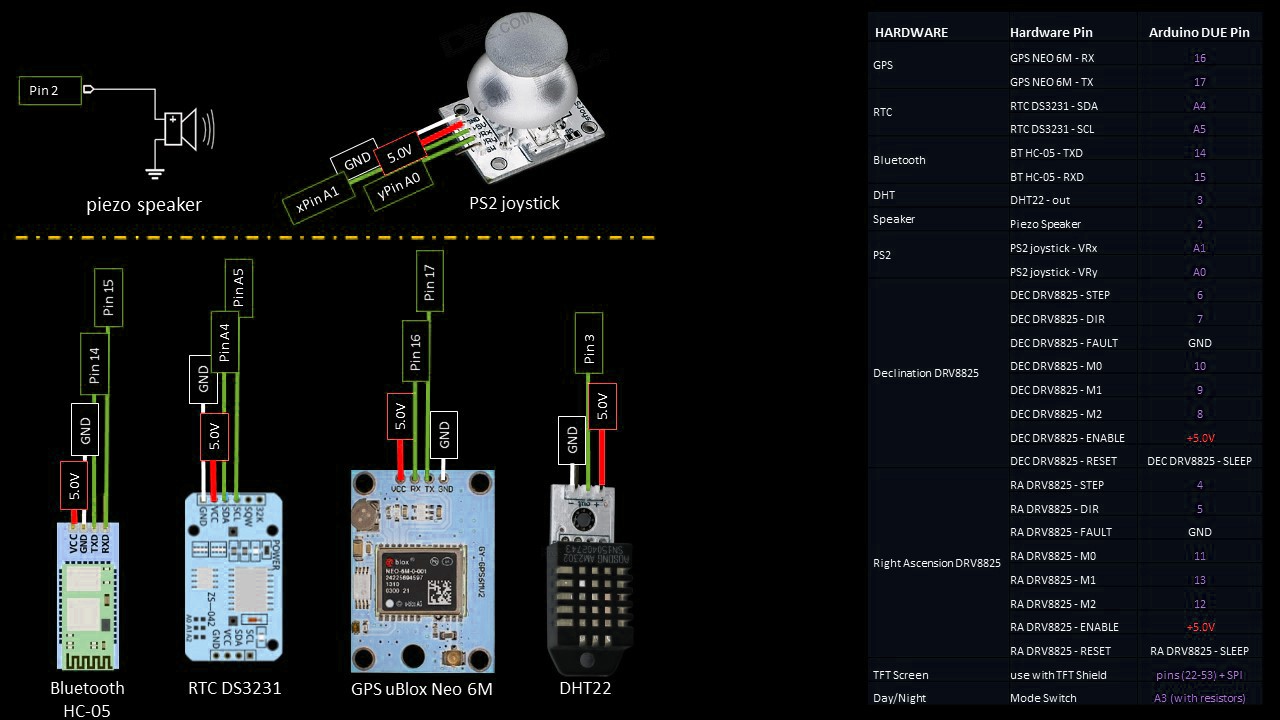
Processus de fabrication