


Comment configurer GRBL et contrôler la machine CNC avec Arduino
Si vous envisagez ou êtes en train de fabriquer votre propre machine CNC, vous rencontrerez très probablement le terme GRBL. Donc, dans ce tutoriel, nous apprendrons ce qu'est GRBL, comment l'installer et comment l'utiliser pour contrôler votre machine CNC basée sur Arduino.
Nous apprendrons également à utiliser Universal G-code Sender, un logiciel de contrôleur GRBL open source populaire.
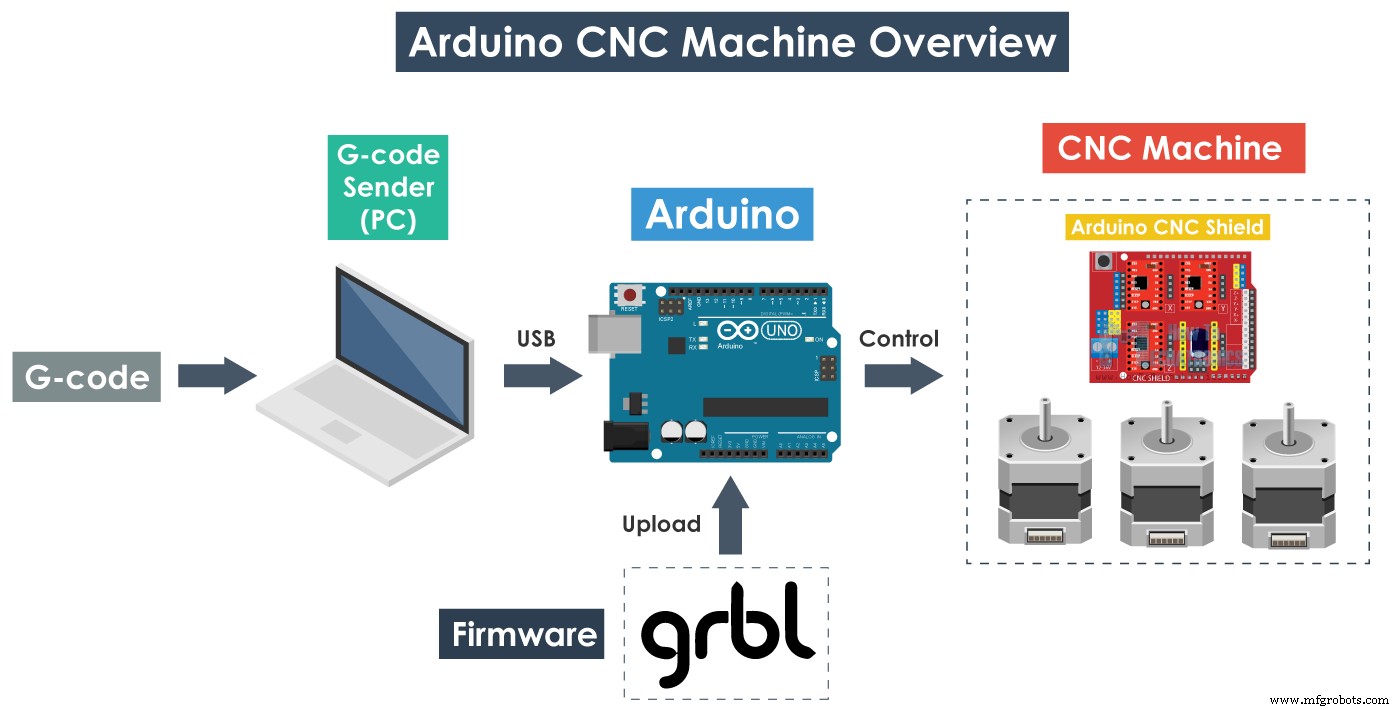
GRBL est un logiciel ou micrologiciel open source qui permet le contrôle de mouvement pour les machines CNC. Nous pouvons facilement installer le micrologiciel GRBL sur un Arduino et nous obtenons ainsi instantanément un contrôleur CNC à faible coût et hautes performances. Le GRBL utilise le code G comme entrée et produit le contrôle de mouvement via l'Arduino.
Pour mieux comprendre, nous pouvons jeter un oeil au schéma suivant :
D'après le diagramme, nous pouvons voir où se situe le GRBL dans la "grande image" du principe de fonctionnement d'une machine CNC. C'est un firmware que nous devons installer ou télécharger sur l'Arduino afin qu'il puisse contrôler les moteurs pas à pas de la machine CNC. En d'autres termes, la fonction du micrologiciel GRBL est de traduire le code G en mouvement du moteur.
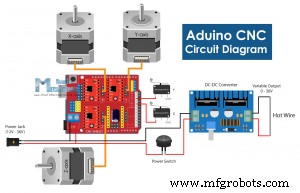
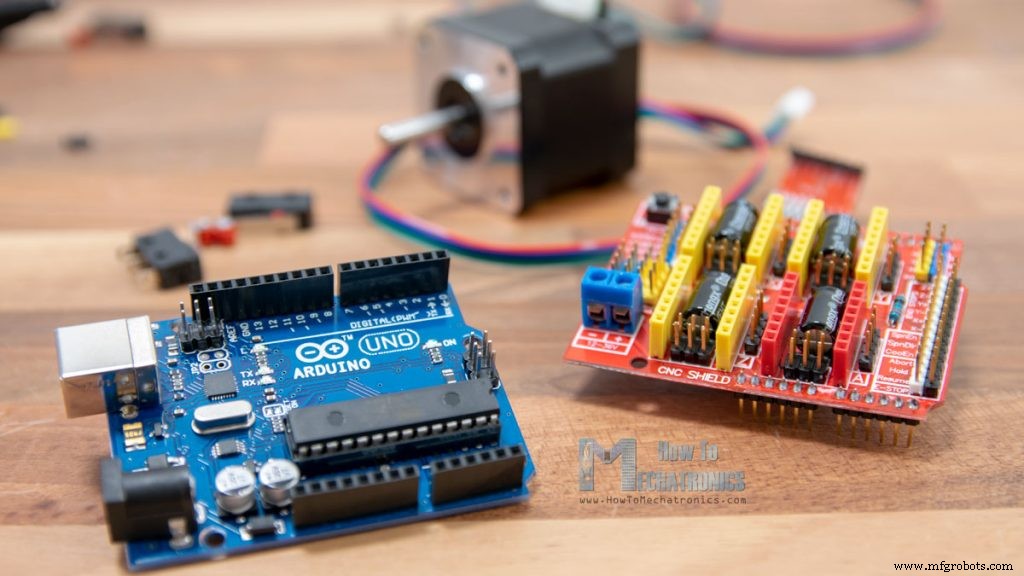
Veuillez noter que ce ne sont que les composants électroniques de base dont nous avons besoin pour comprendre le fonctionnement d'une machine CNC.
En fait, comme exemple de la façon dont tout doit être connecté, nous pouvons jeter un coup d'œil à ma machine de découpe de mousse DIY CNC.
Vous pouvez vérifier et obtenir les principaux composants électroniques nécessaires à la construction de cette machine CNC ici :
L'outil principal de cette machine CNC est un fil chaud qui peut facilement fondre ou couper à travers une mousse de polystyrène et donner la forme que nous voulons. Pour plus de détails sur la façon dont j'ai fabriqué la machine et comment tout fonctionne, vous pouvez consulter le tutoriel particulier.
Néanmoins, nous utiliserons cette machine comme exemple tout au long de cet article, car le même principe de fonctionnement s'applique à toute autre machine CNC, qu'elle soit fraiseuse ou laser.
Tout d'abord, pour pouvoir installer ou télécharger le GRBL sur l'Arduino, nous avons besoin de l'IDE Arduino.
Ensuite, nous pouvons télécharger le firmware GRBL depuis github.com.
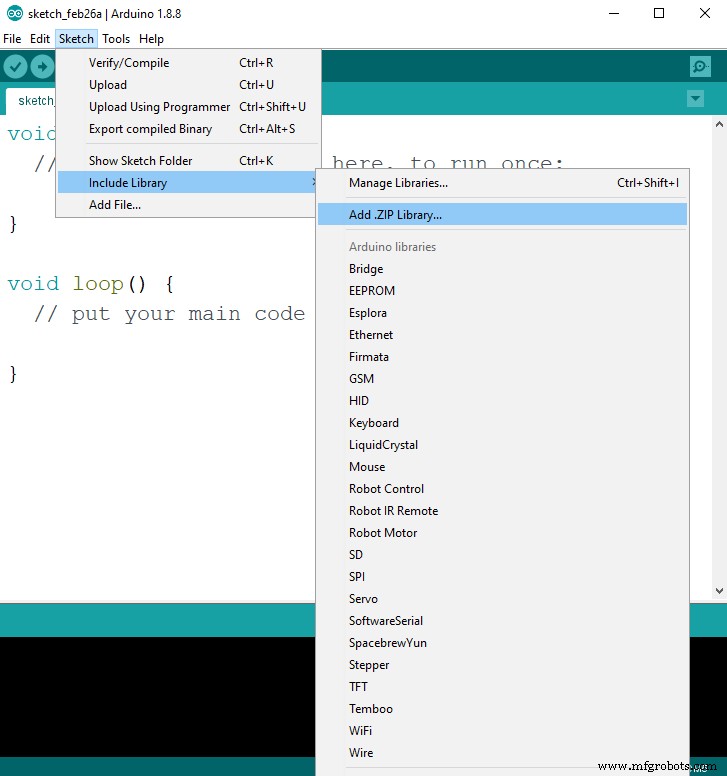
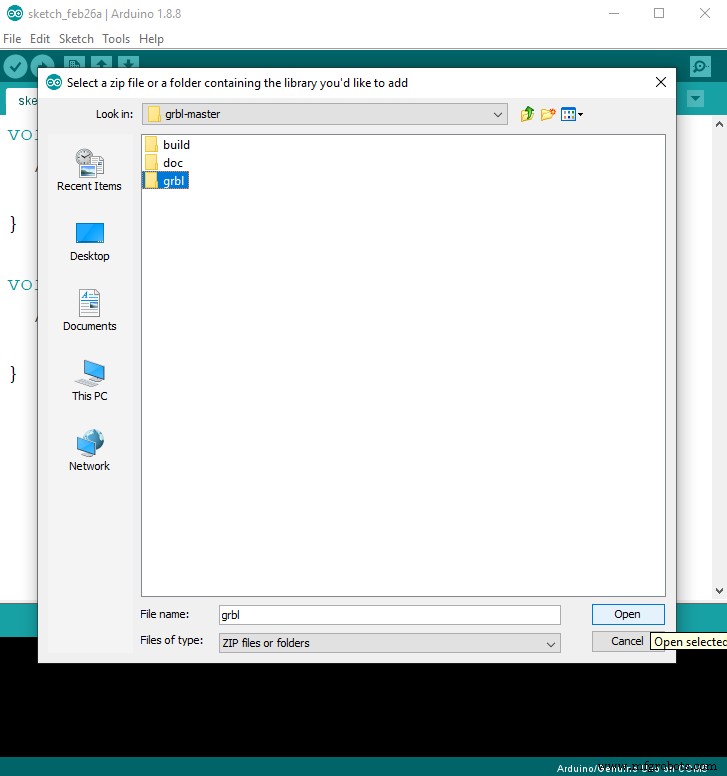
Téléchargez-le sous forme de fichier .ZIP, puis suivez ces étapes :
À ce stade, nous devons configurer ou ajuster le GRBL à notre machine. Nous pouvons le faire via le moniteur série de l'IDE Arduino. Une fois que nous aurons ouvert le moniteur série, nous recevrons un message du type "Grbl 1.1h ['$' for help]". Si vous ne voyez pas ce message, assurez-vous de changer le débit en bauds à 115200.
Si nous tapons "$$", nous obtiendrons une liste de commandes ou de paramètres actuels, et ils apparaîtront comme ceci :
$100=250.000 (x, pas/mm)
Toutes ces commandes peuvent ou doivent être ajustées selon notre machine CNC. Par exemple, avec la première commande, $100=250.000 (x, pas/mm), nous pouvons ajuster les pas par mm de la machine, ou nous pouvons spécifier combien de pas le moteur doit faire pour que notre axe X se déplace de 1 mm.
Cependant, je suggérerais de laisser ces paramètres tels quels. Il existe un moyen plus simple de les ajuster en fonction de notre machine en utilisant le logiciel du contrôleur, que nous expliquerons dans la section suivante.
Ainsi, une fois que nous avons installé le micrologiciel GRBL, notre Arduino sait maintenant comment lire le code G et comment contrôler la machine CNC en fonction de celui-ci. Cependant, pour envoyer le code G à l'Arduino, nous avons besoin d'une sorte d'interface ou d'un logiciel de contrôleur qui dira à l'Arduino quoi faire. En fait, il existe de nombreux programmes open source et commerciaux à cette fin. Bien sûr, nous nous en tiendrons à l'open source, donc à titre d'exemple, nous utiliserons l'expéditeur de code G universel.
Pour cet exemple, j'utiliserai la version 2.0 de la plate-forme. Une fois que nous l'avons téléchargé, nous devons extraire le fichier zip, aller dans le dossier "bin" et ouvrir l'un des fichiers exécutables "ugsplatfrom". Il s'agit en fait d'un programme JAVA, donc pour pouvoir exécuter ce programme, nous devons d'abord installer JAVA Runtime Environment.
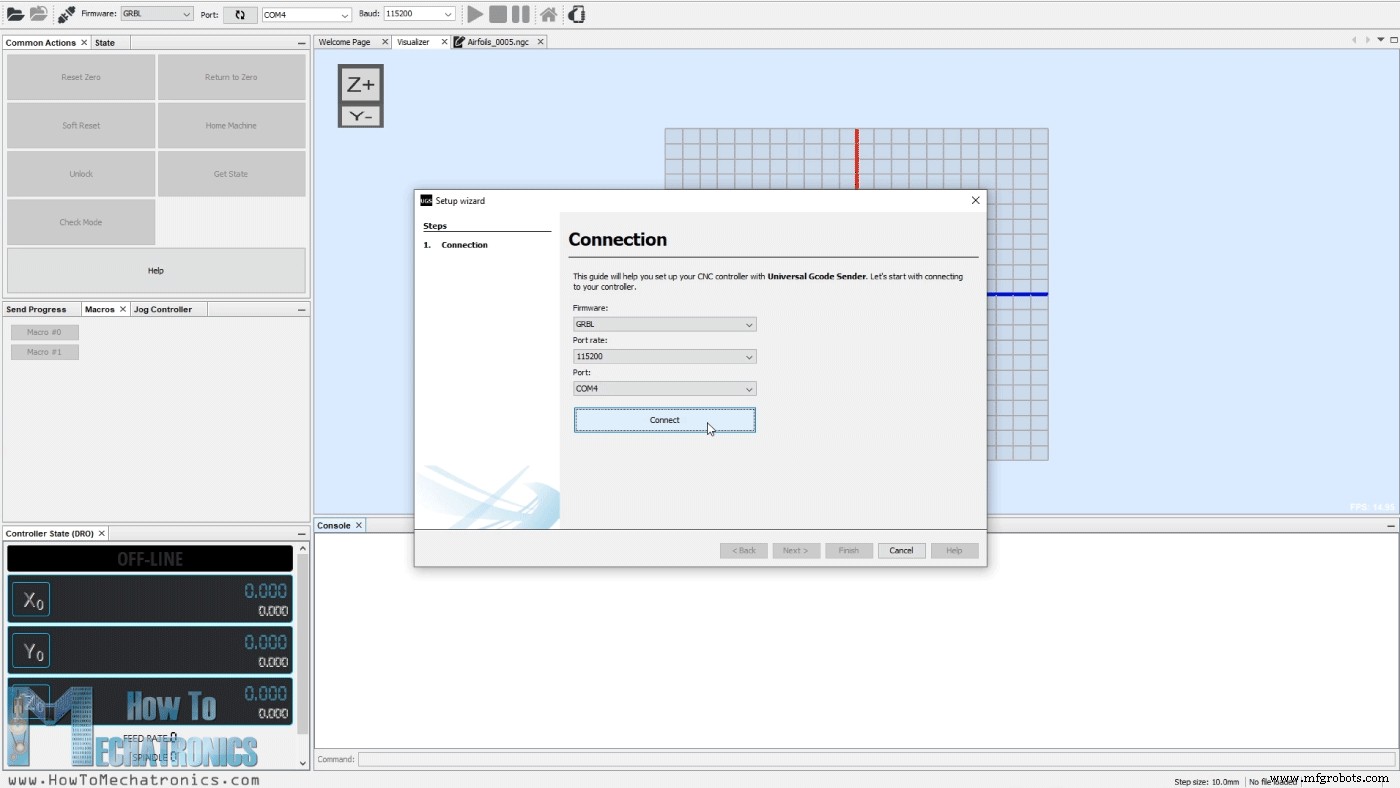
Une fois que nous avons ouvert l'expéditeur universel de code G, nous devons d'abord configurer la machine ou configurer les paramètres GRBL indiqués précédemment. À cette fin, nous utiliserons l'assistant de configuration UGS qui est beaucoup plus pratique que de saisir manuellement des commandes via le moniteur série de l'IDE Arduino.
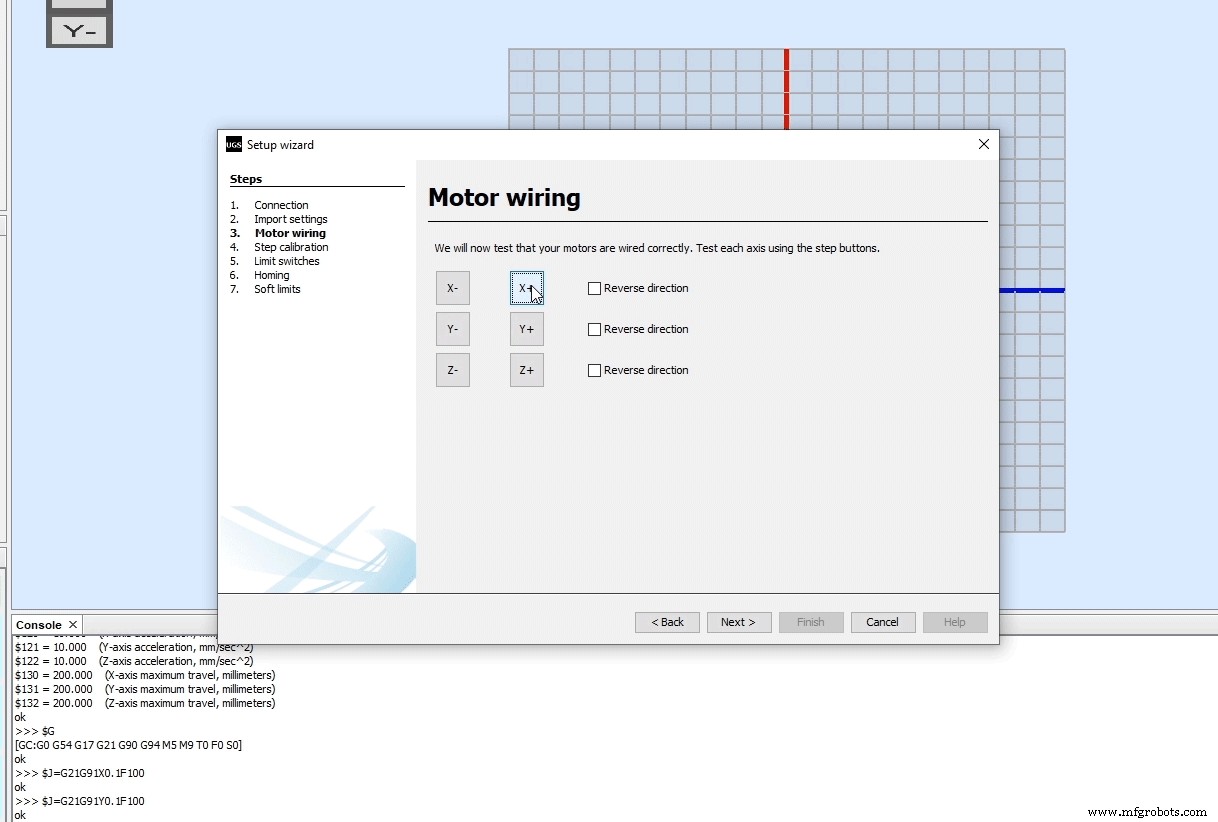
La première étape ici consiste à sélectionner le débit en bauds, qui devrait être de 115200, et le port auquel notre Arduino est connecté. Une fois que nous avons connecté l'émetteur universel de code G à l'Arduino, à l'étape suivante, nous pouvons vérifier le sens de déplacement des moteurs.
Si nécessaire, nous pouvons inverser la direction via l'assistant ou en inversant manuellement la connexion du moteur sur le blindage CNC Arduino.
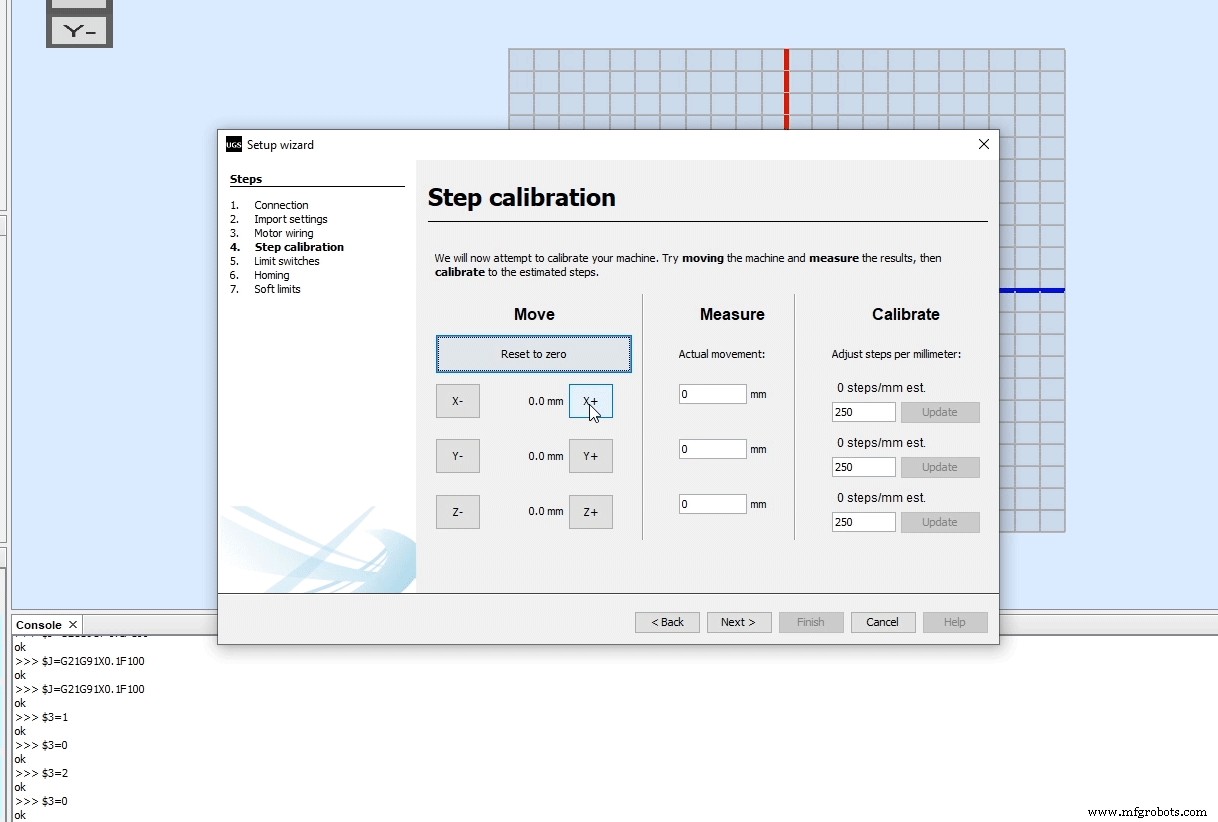
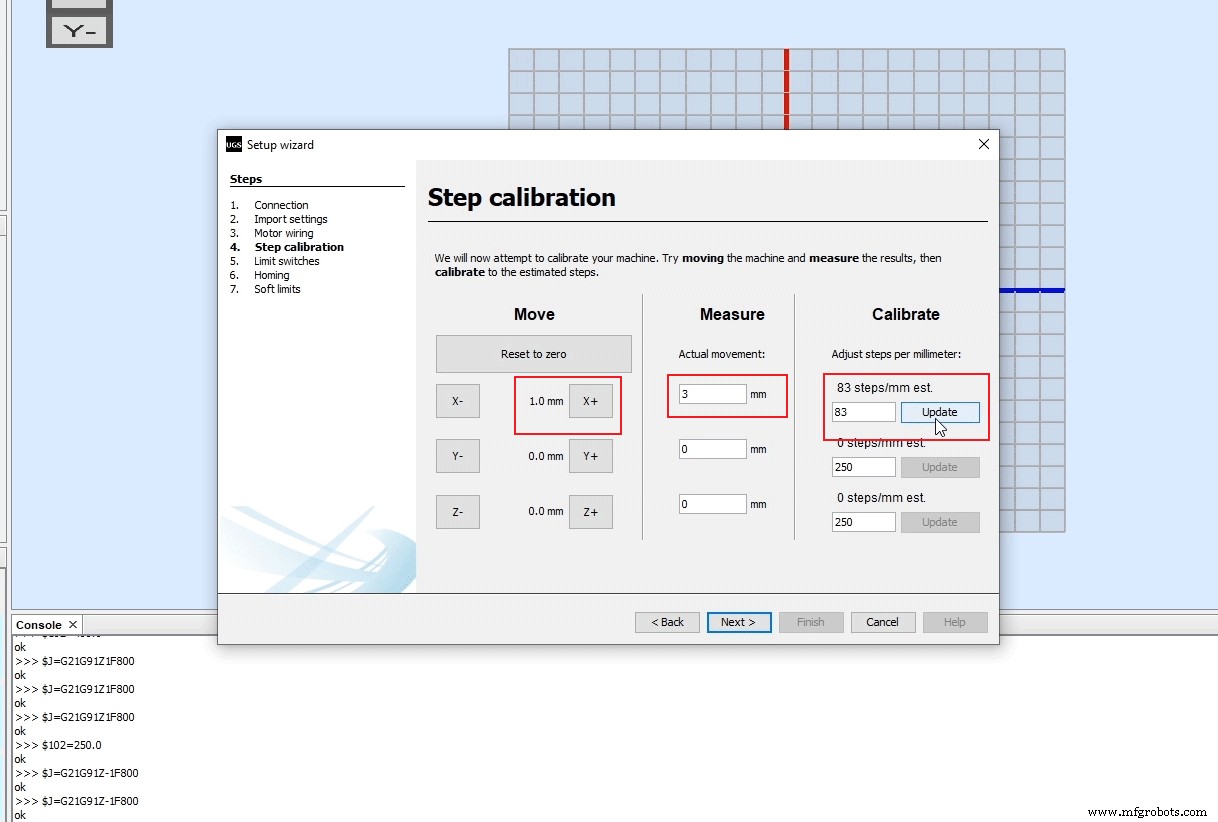
Dans l'étape suivante, nous pouvons ajuster le paramètre pas/mm que nous avons mentionné précédemment. Ici, il est beaucoup plus facile de comprendre comment l'ajuster car l'assistant de configuration calculera et nous dira à quelle valeur nous devons mettre à jour le paramètre.
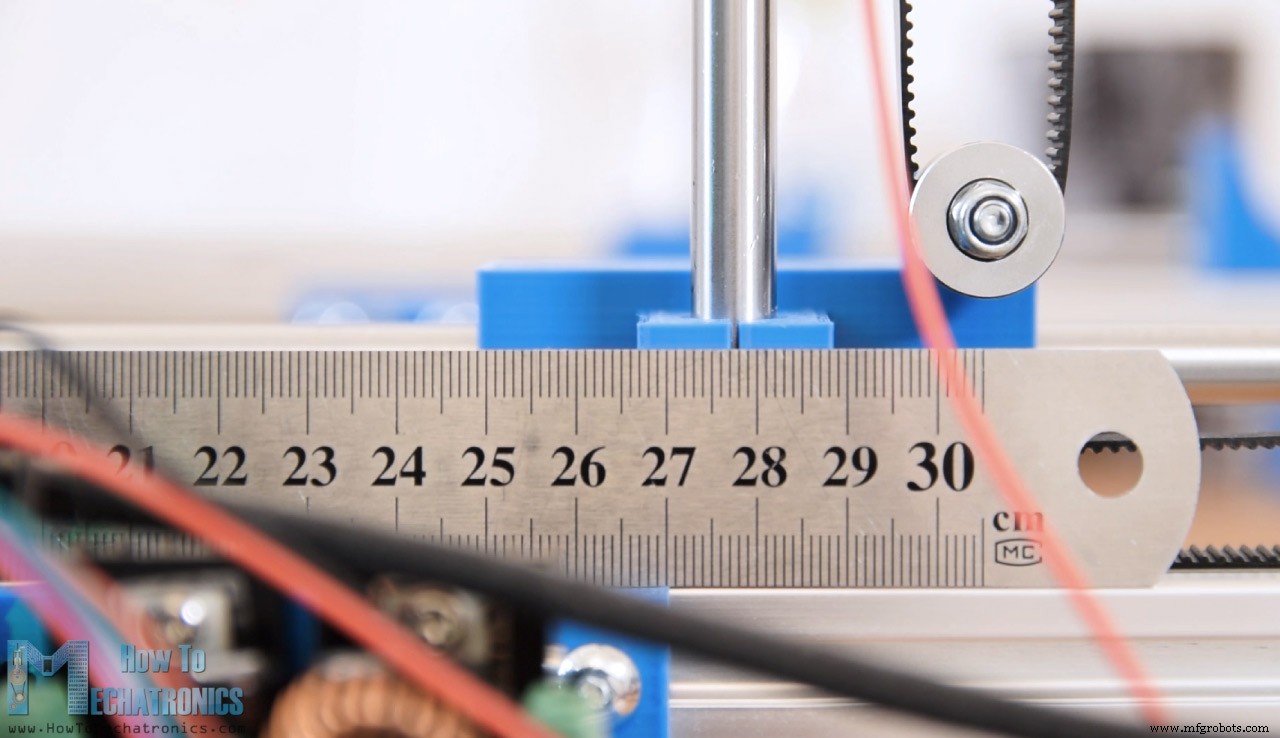
La valeur par défaut est de 250 pas/mm. Cela signifie que si nous cliquons sur le bouton de déplacement "x+", le moteur fera 250 pas. Désormais, en fonction du nombre de pas physiques du moteur, de la résolution de pas sélectionnée et du type de transmission, la machine se déplacera sur une certaine distance. À l'aide d'une règle, nous pouvons mesurer le mouvement réel effectué par la machine et saisir cette valeur dans le champ "Mouvement réel". Sur cette base, l'assistant calculera et nous dira à quelle valeur nous devrions changer le paramètre pas/mm.
Dans mon cas, pour la machine CNC DIY que j'ai fabriquée, la machine s'est déplacée de 3 mm. Selon cela, l'assistant a suggéré de mettre à jour le paramètre étapes/mm à une valeur de 83.
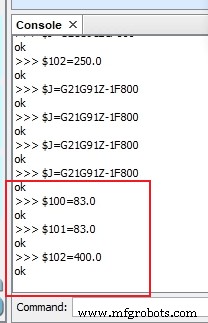
Avec cette valeur mise à jour, la machine se déplace maintenant correctement, 1 mm dans le logiciel signifie 1 mm pour la machine CNC.
Dans la console UGS, au fur et à mesure que nous effectuons chaque action, nous pouvons voir les commandes qui sont exécutées. Nous pouvons remarquer qu'en mettant à jour le paramètre steps/mm, le programme UGS a effectivement envoyé à l'Arduino, ou le firmware GRBL la commande que nous avons mentionnée précédemment. C'était la valeur par défaut :100 $ =250 000 (x, pas/mm), et nous avons maintenant mis à jour la valeur de 83 pas par mm :100 $ =83.
Dans l'étape suivante, nous pouvons activer les interrupteurs de fin de course et tester s'ils fonctionnent correctement.
Selon qu'il s'agit d'une connexion normalement ouverte ou normalement fermée, nous pouvons également les inverser ici.
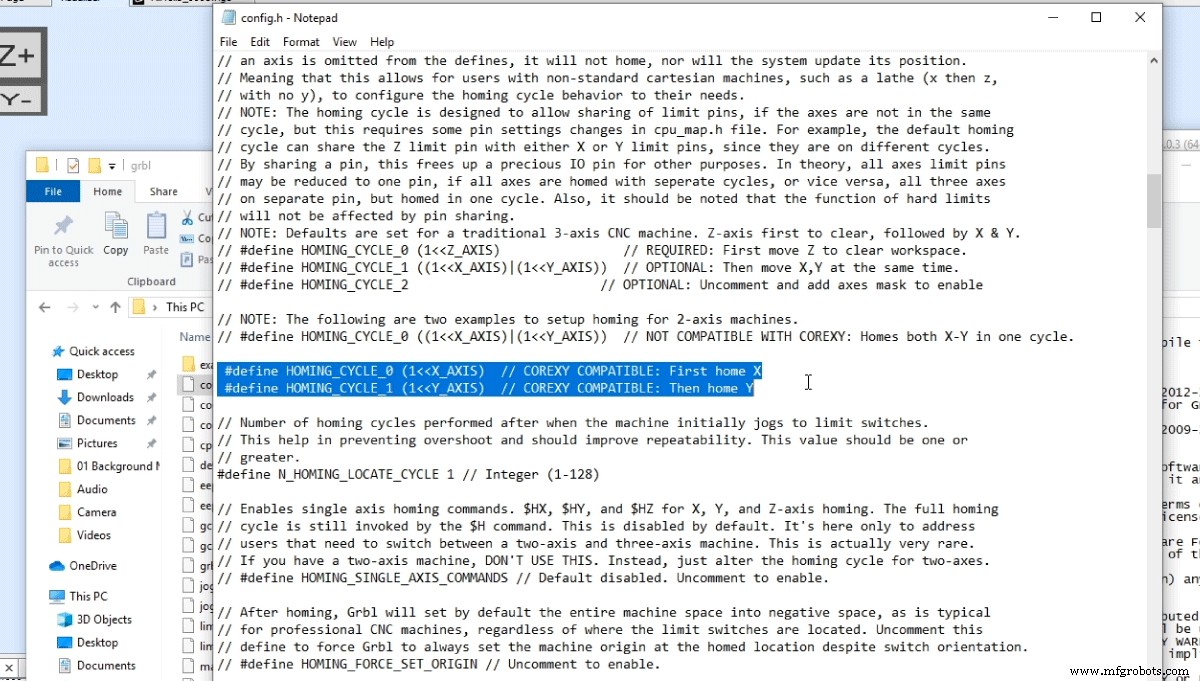
Ici, il convient de noter que nous devons parfois désactiver l'interrupteur de fin de course de l'axe Z. C'était le cas avec ma machine de découpe de mousse CNC DIY où je n'avais pas besoin de l'interrupteur de fin de course de l'axe Z et j'ai dû le désactiver afin de pouvoir positionner correctement la machine. Donc, pour ce faire, nous devons éditer le fichier config.h qui se trouve dans le dossier de la bibliothèque Arduino (ou Documents\Arduino\libraries).
Ici, nous devons trouver les lignes de cycle de prise d'origine et commenter le jeu par défaut pour la machine CNC à 3 axes et décommenter la configuration pour les machines à 2 axes. Pour que les modifications prennent effet, nous devons enregistrer le fichier et recharger le croquis grblUpload sur notre carte Arduino.
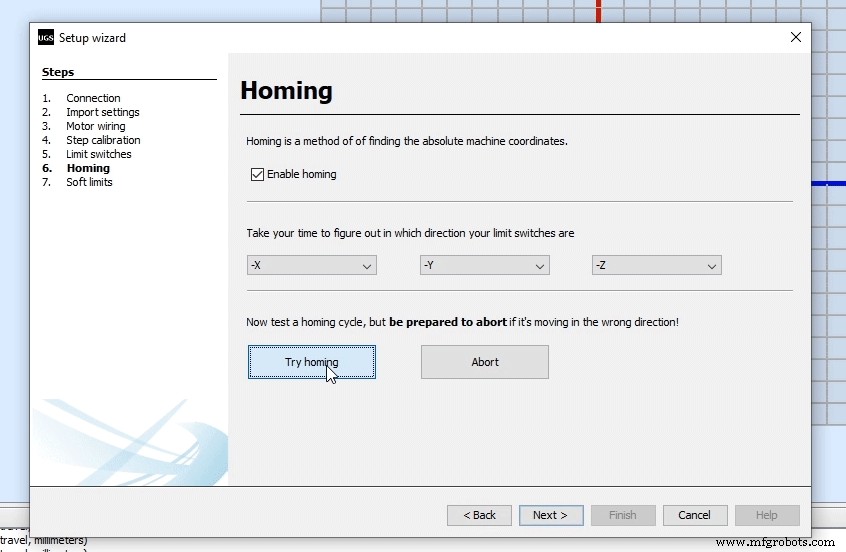
Néanmoins, à l'étape suivante, nous pouvons activer ou désactiver la prise d'origine de la masse CNC.
À l'aide du bouton "Try homing", la machine commencera à se déplacer vers les interrupteurs de fin de course. Au cas où cela irait dans le sens inverse, nous pouvons facilement inverser la direction.
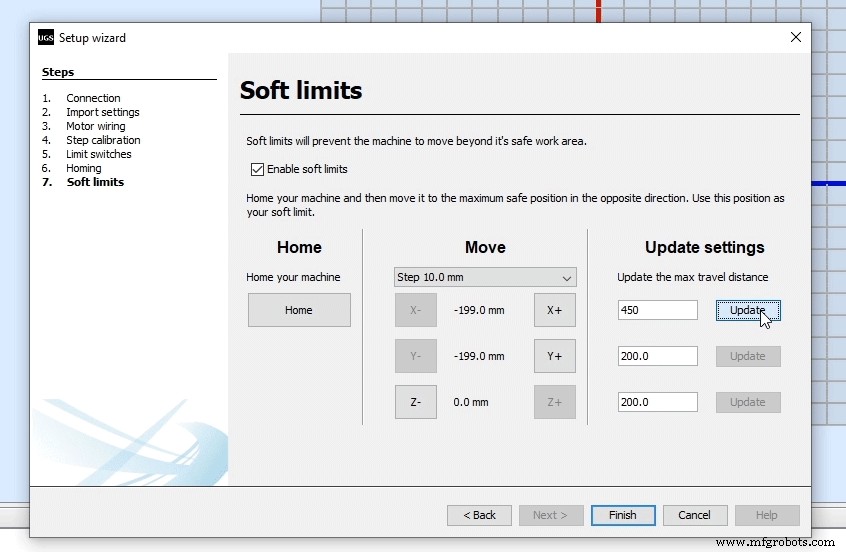
Enfin, dans la dernière étape de l'assistant de configuration, nous pouvons activer les limites souples pour notre machine CNC.
Les limites souples empêchent la machine de se déplacer au-delà de la zone de travail définie.
Ainsi, grâce au firmware GRBL et à l'Arduino, nous pouvons facilement configurer et faire fonctionner notre machine CNC DIY. Bien sûr, nous n'avons couvert que les bases de ce didacticiel, mais je pense que c'était suffisant pour comprendre comment les choses fonctionnent et comment faire fonctionner notre première machine CNC.
Bien sûr, il existe de nombreux autres paramètres et fonctionnalités disponibles, car le GRBL est un micrologiciel de contrôleur CNC vraiment capable. La documentation GRBL explique tout cela en détail, vous pouvez donc toujours les consulter sur leur page wiki sur github.com.
En outre, il existe de nombreux autres programmes de contrôleur GRBL open source comme Universal G-code Sender, et en voici quelques-uns :GRBLweb (Navigateur Web), GrblPanel (Windows GUI), grblControl (Windows/Linux GUI), Easel (basé sur un navigateur) etc. . Vous devriez les explorer et voir lequel vous convient le mieux.Qu'est-ce que GRBL ?
Matériel requis

Comment installer GRBL
Configuration GRBL
$101=250.000 (y, pas/mm)
$102=3200.000 (z, pas/mm)
$110=500.000 (x taux max, mm/min)
111 $ = 500 000 (vitesse maximale y, mm/min)
112 $ =500 000 $ (vitesse maximale z, mm/min)
120 $ =10 000 (x accélération, mm/sec ^2)
121 $=10 000 (accélération y, mm/sec^2)
122 $=10 000 (accélération z, mm/sec^2)Contrôleur GRBL

Comment utiliser l'expéditeur universel de code G
Conclusion
Processus de fabrication
- Comment trouver une machine CNC d'occasion
- Comment nettoyer une machine CNC d'occasion
- Comment générer un fichier G-Code avec ArtCAM pour une machine CNC ?
- Comment éviter les problèmes avec les machines CNC d'occasion
- Comment choisir votre machine CNC
- Tour avec CNC
- Comment usiner des bijoux avec l'usinage CNC ?
- Comment automatiser les processus des machines CNC
- Comment CNC Swiss Machine excelle dans le tournage ?