


Moteur de pilote L293D :comment le connecter à un moteur à courant continu à l'aide d'Arduino
Supposons que vous ayez l'intention de concevoir un robot ou une petite voiture, la connaissance des moteurs est primordiale. Un moyen très économique et simple de contrôler ces moteurs consiste à utiliser un blindage de moteur de pilote L293D. Mieux encore, utilisez-le dans une interface avec un microcontrôleur comme Arduino.
Parmi les autres, le pilote de moteur L293D est l'un des chipsets les plus populaires de son genre. Plus encore, pour ses diverses applications dans les constructions électroniques telles que les servomoteurs, les moteurs pas à pas et les moteurs à courant continu. Cependant, son attribut crucial semble être son contrôle de direction et de vitesse dans deux moteurs à courant continu indépendants. Et c'est ce que vous apprenez plus loin dans cette instructable.
1. Qu'est-ce que le pilote de moteur L293D ?
Ce chipset à 16 broches est un pilote de pont en H à deux canaux pour les moteurs. Souvent, sa fonction principale est d'être une interface de contrôle pour les paires de moteurs à courant continu ou dans un seul moteur pas à pas.
Par défaut, le chipset de blindage du pilote de moteur L293D est livré par deux. Par conséquent, il est capable de piloter quatre moteurs à courant continu. Pour cette raison, le chipset L293D est un atout de construction précieux dans les robots à quatre roues.
Au total, le bouclier vous donne quatre ponts en H. Par conséquent, chaque pont en H délivre un courant moteur de 0,6A. De plus, le registre à décalage 74HC595 est une caractéristique de la sécurité. Ce registre, par conséquent, étend les huit broches de contrôle du double circuit intégré L293D aux broches à quatre chiffres de l'Arduino.

(Un pilote de moteur L293D quadruple à pont en H à 16 broches à courant élevé).
2. Caractéristiques du pilote de moteur l293D
Certaines caractéristiques qui font du pilote de moteur L293D un si bon composant dans les projets de CNC et de robot incluent :
- Il vous permet de contrôler les niveaux de direction et de vitesse dans l'appareil appliqué.
- Plus intéressant encore, le pilote permet de faire fonctionner deux moteurs DC doubles similaires.
- La tension du moteur, Vs. (Vcc2) est compris entre 4,5 V et 36 V.
- En outre, son courant moteur continu maximal est de 600 mA.
- D'autre part, le courant de crête maximal du moteur est de 1,2 A.
- La tension d'alimentation Vss(Vcc1) est comprise entre 4,5 V et 7 V.
- Le temps de transition est de 300 ns entre 5 V et 24 V, au maximum.
- Par activation thermique, il est possible d'enclencher l'arrêt automatique.
- Enfin, le circuit intégré est disponible dans les packages SOIC, DIP et TSSOP.
3.Configuration des broches de sortie du blindage du pilote de moteur L293D
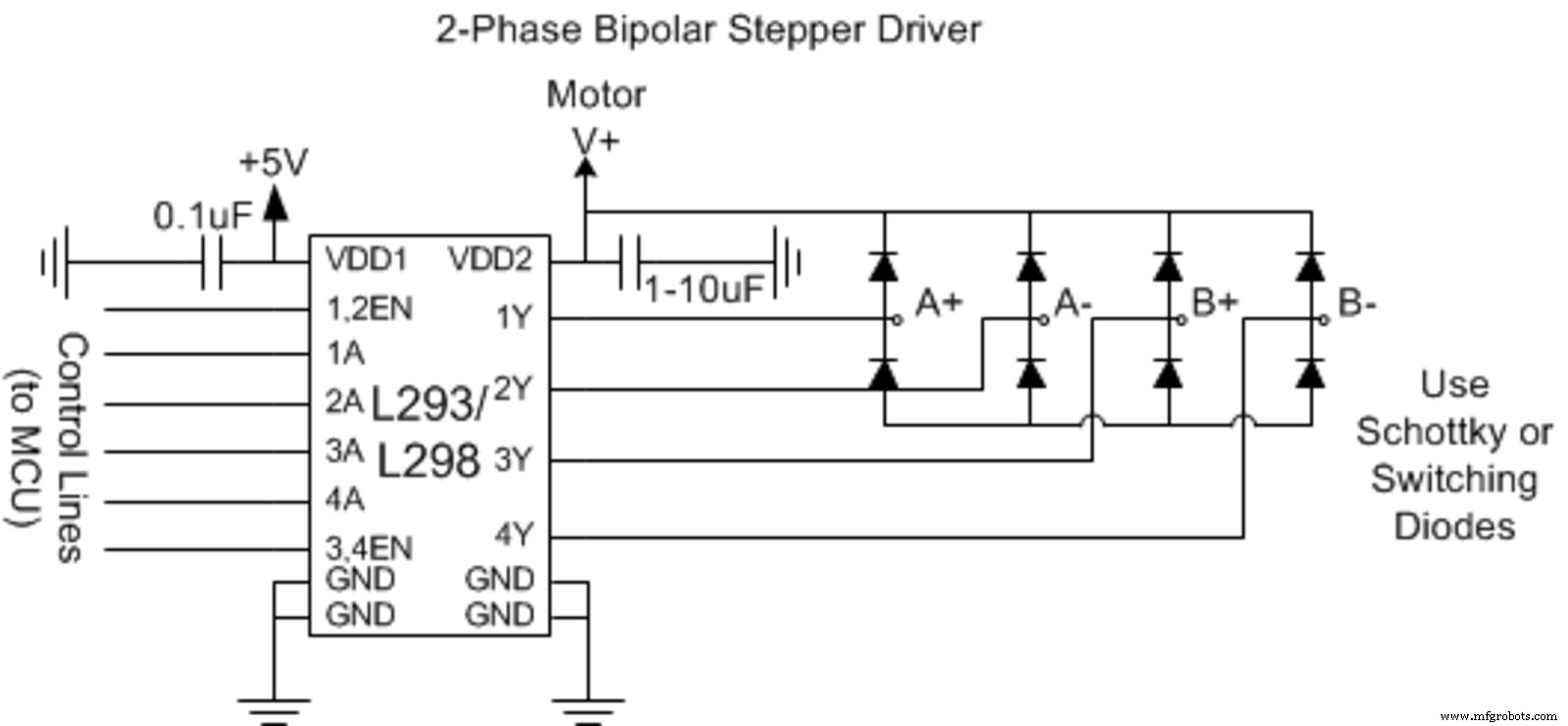
(Un schéma de broche schématique montrant un pilote de moteur pas à pas bipolaire L293D).
| Numéro d'identification personnel | Nom de la broche | Description de la broche |
| 1 | Activer 1,2 | Ce terminal active les broches d'entrée :Entrée 1(2) et Entrée 2(7). |
| 2 | Broche d'entrée 1 | Il fonctionne comme un contrôle direct pour la broche de sortie 1. Souvent, vous le trouvez applicable dans le contrôle de circuit numérique. |
| 3 | Broche de sortie 1 | Cette broche se connecte à une extrémité, le moteur 1. |
| 4 | Terre | À une extrémité, cette broche va à la masse du circuit (0 V). |
| 5 | Terre | Nous avons cette autre broche de masse (0 V) de l'autre côté. |
| 6 | Broche de sortie 2 | Comme dans la broche de sortie 1, cette borne se connecte à l'autre extrémité du moteur 1. |
| 7 | Broche d'entrée 2 | Il contrôle directement la broche de sortie 2. Il s'applique également aux commandes de circuits numériques. |
| 8 | Vs. (Vcc2) | Avec une tension nominale de 4,5 V à 36 V, il se connecte à la broche de tension et alimente les moteurs. |
| 9 | Activer 3,4 | Ce terminal n'active que les broches d'entrée :Entrée 3(10) et Entrée 4(15). |
| 10 | Entrée 3 | Il offre un contrôle direct pour la broche de sortie 3. De plus, il fonctionne comme une autre prise de contrôle de circuit numérique. |
| 11 | Sortie 3 | Cette broche se connecte à une extrémité du moteur 2. |
| 12 | Terre | Ici, la broche Ground connecte la masse du circuit (0V) |
| 13 | Terre | Encore une autre broche de masse connectée à la masse du circuit (0V) |
| 14 | Sortie 4 | Comme la sortie 3, cette broche va également à l'autre extrémité du moteur 2. |
| 15 | Entrée 4 | À cette fin, il offre un contrôle direct pour la broche de sortie 4. Il fonctionne également comme une commande de circuit numérique. |
| 16 | Vss (Vcc2) | Enfin, la broche se connecte à une tension externe de +5V chargée d'alimenter le CI. |
4. Principe de fonctionnement du pilote de moteur L293D
Comme indiqué précédemment, le pilote de moteur L293D peut contrôler deux moteurs à courant continu. Par conséquent, il est essentiel de comprendre le fonctionnement de ce circuit intégré à pont en H à double canal.
(Un schéma montrant un moteur unipolaire de 5 volts connecté à un L293D).
La première étape du principe de fonctionnement consiste à mettre en place un pont en H. En d'autres termes, il utilise des doubles paires de transistors Darlington que nous appelons Q2/Q3 et Q1/4. En face de chacun, une diode se connecte au collecteur et à l'émetteur des transistors. En conséquence, il empêche la force contre-électromotrice générée par le moteur d'endommager les transistors.
Ainsi, lorsque les transistors Q1/Q4 sont en position ON, les transistors Q2/Q3 se bloquent. Ainsi, il y a un flux de courant de Vcc, à travers le moteur et vers le sol.
Cette action provoque une rotation dans le sens horaire/antihoraire du moteur. En résumé, la polarité du moteur et le mode de connexion à l'alimentation déterminent le sens d'essorage.
D'autre part, lorsque les transistors Q1/Q4 sont éteints, Q2/Q3 s'allument automatiquement. Ainsi, il y a une inversion dans le courant circulant via le moteur. Ainsi, lorsque ce courant inverse circule, le sens de rotation du moteur alterne également.
5. Comment utilisons-nous le pilote de moteur L293D ?
Comme mentionné précédemment, le pilote de moteur L293D utilise un courant de commande bidirectionnel d'environ 600 mA et une plage de 4,5 V à 36 V. Cependant, ces fonctionnalités impliquent l'utilisation de cette puce de pilote de moteur à 16 broches avec Arduino Uno.
Par conséquent, nous introduisons un projet qui connecte les moteurs à courant continu et L293D à ARDUINO. Voici donc une procédure par étapes pour régler le circuit qui contrôle la direction et la vitesse du moteur à courant continu.
Première étape :assemblez les matériaux dont vous avez besoin pour le projet.
- Deux potentiomètres 10K.
- Jeu de puces de pilote de moteur L293D.
- Deux petits moteurs à courant continu.
- Arduino Uno ou Arduino Pro Mini.
- Breadboard.
- Câbles volants.
Étape 2 :Configuration du circuit
Les connexions impliquées dans ce circuit sont assez simples.
Cependant, nous utilisons un didacticiel vidéo pour configurer le circuit pour une illustration plus précise.
Le moteur est souvent mieux avec une alimentation différente. Dans ce cas, nous utilisons 12V pour le moteur. D'autre part, une alimentation 5V alimente le L293D et l'Arduino.
Remarque :La source d'alimentation externe va à la broche 8 du L293D. Prenez des précautions lors de ces connexions. Sinon, vous risquez d'endommager les moteurs.
Étape 3 :Le code pour programmer un moteur à courant continu
Nous allons le faire, et deux étapes de base sont nécessaires.
Installez la bibliothèque AFMotor.h.
Tout d'abord, nous avons besoin d'un support de communication avec le L293D IC. Pour cela, nous devons installer la bibliothèque AFMotor.h.
Cette bibliothèque nous permet d'émettre des commandes qui contrôlent les moteurs à courant continu, à solénoïde et pas à pas.
Pour installer la bibliothèque AFMotor.h, faites d'abord défiler jusqu'à Sketch. Ensuite, recherchez « Inclure la bibliothèque », puis recherchez « Gérer les bibliothèques ». Le gestionnaire de bibliothèque met à jour la liste des bibliothèques installées au fur et à mesure que le gestionnaire de bibliothèque télécharge l'index.
Ensuite, utilisez le filtre de recherche pour trouver "Motor Shield". Parmi les entrées, sélectionnez la bibliothèque Adafruit Motor Shield d'Adafruit, puis cliquez sur Installer.
Exécuter le code Arduino
Ensuite, nous devons exécuter le code Arduino ci-dessous :
#include
AF_DCMotor moteur(4);
annuler la configuration()
{
//Définir la vitesse de démarrage du moteur et l'arrêter
moteur.setSpeed(200);
moteur.run(RELEASE);
}
annuler la boucle()
{
uint8_t i;
// Allume le moteur
moteur.run(FORWARD);
// Accélération de 0 à la vitesse maximale
pour (i=0; i<255; i++)
{
moteur.setSpeed(i);
retard(10);
}
// Décélération de la vitesse maximale à 0
pour (i=255 ; i!=0 ; i–)
{
moteur.setSpeed(i);
retard(10);
}
// Ensuite, modifiez le sens du moteur
motor.run(BACKWARD);
// Accélération de 0 à la vitesse maximale
pour (i=0; i<255; i++)
{
moteur.setSpeed(i);
retard(10);
}
// Décélération de la vitesse maximale à 0
pour (i=255 ; i!=0 ; i–)
{
moteur.setSpeed(i);
retard(10);
}
// Éteignez maintenant le moteur
moteur.run(RELEASE);
retard(1000);
}
Étape 4 :Configuration terminée
À ce stade, la configuration de votre circuit de bricolage est terminée. Vous disposez maintenant d'un mécanisme de contrôle pour tout appareil à moteur à courant continu utilisant cette puce L293D et le microcontrôleur Arduino Uno.
6.L293D Equivalent IC Double Minuterie
D'autres CI similaires à L293D incluent ULN2003, SN754410, LB1909MC.
(Un circuit intégré ULN2003 sur un circuit imprimé montrant les broches étiquetées et les points de connexion)
7. Les Applications de L293D
- Il vous aide à piloter des appareils LED à courant élevé.
- Il est également applicable aux moteurs à courant élevé actionnés par des circuits numériques tels que les robots.
- Le pilote L293D fait partie intégrante des moteurs pas à pas et des moteurs en général.
- Pour une utilisation dans les modules de pilote de relais. Par conséquent, cela rend possible un relais de verrouillage.
Résumé
Il existe d'autres méthodes différentes pour contrôler les moteurs à courant continu à l'aide d'Arduino de plusieurs façons. Cependant, l'un des moyens les plus simples consiste à utiliser un circuit intégré de pilote de moteur L293D. Un circuit intégré L293D donne un avantage pour contrôler simultanément la vitesse et la direction de deux moteurs à courant continu séparés.
En conclusion, nous avons appris à configurer et à programmer un moteur à courant continu avec ce circuit intégré. Mais, peut-être, vous voulez vous essayer à quelque chose de plus difficile. Pour plus de tutoriels sur la façon de procéder, contactez notre page de contact pour obtenir des conseils complets.
Technologie industrielle
- Système robotique de détection humaine utilisant Arduino Uno
- Lecture du signal PPM du récepteur RC à l'aide d'Arduino
- Jouet contrôlé par Android utilisant un bouclier de moteur Raspberry
- Comment mesurer la masse de la Terre à l'aide d'Arduino
- Comment créer un site web communiquant Arduino en utilisant PHP
- Bras de robot Arduino DIY – Contrôlé par des gestes de la main
- Comment fonctionne un moteur à courant continu brossé
- Comment faire une boussole en utilisant Arduino et Processing IDE
- Comment vérifier un moteur CC