


RTOS vs GPOS :un guide complet
Dans cette ère moderne, nous avons vu beaucoup de solutions logicielles et matérielles qui nécessitent un système d'exploitation. Les systèmes d'exploitation permettent à ces appareils de fonctionner correctement et de gérer des tonnes de tâches différentes. Cependant, en tant que passionné d'électronique, vous aurez probablement besoin de plus d'informations sur le type de système d'exploitation dont vous avez besoin pour votre projet. Heureusement, nous avons ce qu'il vous faut. Dans cet article, vous trouverez tout sur RTOS vs GPOS, leurs comparaisons et différents types d'applications. De plus, si vous voulez simplement en savoir plus sur ces systèmes d'exploitation, vous êtes au bon endroit.
Prêt? Commençons.
Systèmes d'exploitation à usage général (GPOS)
Le GPOS est un système d'exploitation qui peut gérer un grand nombre de processus et effectuer une exécution par unité de temps, ce que nous aimons appeler le débit. Parfois, le système d'exploitation à usage général retardait l'exécution d'un thread de haute priorité pour exécuter cinq ou six processus de faible priorité.

Poste de travail informatique
Ainsi, pour atteindre le débit élevé nécessaire, il servirait cinq tâches de faible priorité plutôt que d'exécuter un processus de haute priorité. En d'autres termes, si plusieurs tâches de faible priorité sont mises en file d'attente pour exécution, le GPOS autorisera ces tâches à s'exécuter en premier afin de maintenir son débit élevé.
Désormais, la plupart des systèmes d'exploitation à usage général utilisent une politique d'équité pour acheminer les processus et les threads vers le processeur.
De plus, cette politique permet au GPOS de fournir le rendement global élevé dont les applications de bureau et de serveur ont besoin pour fonctionner efficacement.
Mais, il ne peut pas garantir qu'une tâche hautement prioritaire ou des threads critiques s'exécuteront avant les threads de faible priorité. Ainsi, le système d'exploitation à usage général fonctionne mieux pour les appareils qui effectuent plusieurs tâches en même temps.

Ordinateur personnel (PC)
Système d'exploitation en temps réel (RTOS)
D'autre part, RTOS a une conception qui gère les applications urgentes avec une grande précision. Pour qu'un système d'exploitation entre dans cette catégorie, il doit disposer d'une durée maximale pour chaque opération critique qu'il effectue. En d'autres termes, il s'agit d'un système limité dans le temps.
Un système d'exploitation en temps réel est assez complexe. Mais ne vous inquiétez pas, nous allons le décomposer pour vous. Le RTOS a trois fonctionnalités de base qui sont le planificateur, les services RTOS, la synchronisation et la messagerie.
Le planificateur
Le planificateur a trois états :le premier est l'état prêt à s'exécuter qui s'applique à une tâche prête qui peut passer à l'état en cours d'exécution si nécessaire. Le deuxième est l'état d'exécution qui s'applique au moment où une tâche est en cours d'exécution. Enfin, l'état bloqué est lorsque la tâche ne peut pas s'exécuter et est envoyée à un état bloqué.
De plus, il existe trois types de techniques de planification qui sont :
Méthode de planification des tâches préventive/Planification basée sur les priorités
La technique d'ordonnancement préemptif implique une allocation de temps en fonction de la priorité. Ici, vous pouvez attribuer un niveau de priorité unique à chaque tâche.
Planification coopérative
Ici, vous pouvez attribuer un créneau fixe à chaque tâche. Cependant, si la tâche ne termine pas son exécution, elle perdrait les données générées et attendrait son prochain tour.
Enfin, le noyau s'occupe de créer une tâche, de changer la priorité d'une tâche, de changer l'état d'une tâche et de supprimer une tâche.
Services RTOS
Au cœur de chaque système d'exploitation se trouve un noyau. Le noyau est responsable de la gestion et de l'allocation des ressources d'un système d'exploitation. Cependant, les tâches ne peuvent pas toujours attirer l'attention du processeur, de sorte que le noyau doit fournir d'autres services tels que les services de temps, les services d'entrée-sortie, les services de gestion des interruptions, les services de gestion de la mémoire et les services de gestion des périphériques.
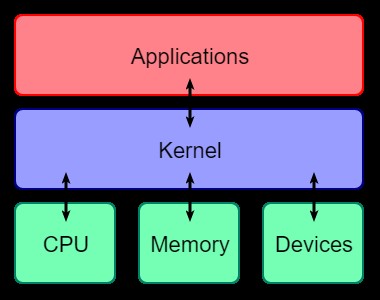
Diagramme du noyau
Messagerie et synchronisation
La fonctionnalité de messagerie permet au RTOS de communiquer avec d'autres systèmes entre les tâches. Les services de messagerie comprennent les boîtes aux lettres, les canaux, les files d'attente de messages, les indicateurs d'événement et les sémaphores.
Les boîtes aux lettres, les files d'attente de messages et les canaux peuvent envoyer des messages entre les tâches tandis que les indicateurs d'événement peuvent synchroniser toutes les activités inter-tâches. De plus, les sémaphores peuvent synchroniser l'accès aux ressources partagées.
RTOS (systèmes d'exploitation en temps réel) vs GPOS (systèmes d'exploitation à usage général)
La différence fondamentale entre le RTOS et le GPOS est la nature de l'application (si elle est urgente ou non, simple ou polyvalente). Un bon exemple de système à temps critique est un guichet automatique. Une personne attendrait 4 ou 5 secondes pour obtenir de l'argent à un guichet automatique après avoir appuyé sur le bouton de confirmation. Personne ne voudrait attendre cinq minutes après avoir appuyé sur le bouton de confirmation.

GAB
D'un autre côté, les PC ont plusieurs objectifs, ce qui en fait un système qui n'est pas urgent. Vous pouvez exécuter plusieurs applications en même temps avec un PC. De plus, il n'y a pas de temps particulier pour faire quoi que ce soit sur un PC et même un smartphone. Par exemple, l'enregistrement d'un document peut prendre quelques secondes ou minutes dans certains cas. Mais cela dépend du nombre de processus et de tâches en cours d'exécution.

Smartphone
Ainsi, un système d'exploitation à usage général fonctionne pour les applications et les systèmes non urgents tels que Linux, Windows, etc.
Système Linux
Alors que les systèmes d'exploitation en temps réel fonctionnent pour les applications urgentes qui nécessitent des réponses rapides et prévisibles, comme UCOS, VxWorks, etc.
Voici des catégories pour mieux expliquer les différences entre les deux systèmes d'exploitation :
Planification des tâches
Dans la catégorie de la planification des tâches, le GPOS ne se concentre pas sur la priorité. Il gère la planification d'une manière qui offre un débit élevé. Alors que dans le cas d'un RTOS, la planification est toujours axée sur la priorité. Contrairement au GPOS, tous les processus hautement prioritaires s'exécutent avant toute tâche de faible priorité.

Windows
Problèmes de latence
Voici un problème majeur qui afflige le GPOS. La plupart des GPOS ont une latence de répartition illimitée, ce qui signifie que plus il y a de threads à planifier, plus les latences s'accumulent. RTOS n'a pas de tels problèmes car tous les threads et processus ont des latences limitées (les threads s'exécuteront dans un délai défini).
Facteurs économiques et matériels
RTOS fonctionne pour les systèmes autonomes et bas de gamme comme un distributeur automatique ou un guichet automatique. De plus, le RTOS est petit et léger par rapport à un GPOS. De plus, GPOS fonctionne à des fins générales et sur des appareils haut de gamme tels que des postes de travail ou des ordinateurs personnels.

Appareils haut de gamme
Noyau préemptif
Un problème majeur lorsqu'il s'agit d'abord de l'exécution de processus hautement prioritaires est un noyau préemptif. Ainsi, si un noyau n'est pas préemptif, une demande de ce noyau écraserait immédiatement tous les autres processus en cours d'exécution. Alors que le noyau d'un RTOS est préemptif, le noyau d'un GPOS ne l'est pas.
En d'autres termes, une exécution de processus hautement prioritaire dans un GPOS ne peut pas anticiper un appel au noyau, tandis que les processus hautement prioritaires dans RTOS préempteront toujours une tâche à faible priorité si nécessaire et traiteront les tâches en dehors de l'appel du noyau comme externes. processus.
RTOS contre GPOS– Évaluer et sélectionner un RTOS pour le développement d'un produit embarqué
Avant d'évaluer un RTOS intégré qui répond à toutes les exigences des systèmes embarqués, assurez-vous de vérifier que le RTOS potentiel prend en charge certaines fonctionnalités importantes.
Pour vous faciliter la tâche, voici un aperçu de ces fonctionnalités essentielles :
RTOS contre GPOS– Planificateurs
Les planificateurs des systèmes d'exploitation s'occupent de décider à quelle heure le système d'exploitation doit exécuter chaque tâche. Les planificateurs peuvent suspendre et reprendre n'importe quelle tâche en fonction des ressources disponibles et de la priorité. Ainsi, un RTOS intégré doit avoir un planificateur intégré. Cela permettra au RTOS d'effectuer l'exécution des tâches en temps réel.
Minuteurs logiciels
Comme leur nom l'indique, les temporisateurs logiciels permettent l'exécution de fonctions dans une fenêtre de temps spécifiée. Il n'est ni facile ni conseillé de créer manuellement un minuteur logiciel pour votre RTOS, alors assurez-vous de sélectionner un RTOS avec un minuteur logiciel intégré.
RTOS contre GPOS– Mécanisme de file d'attente
Les files d'attente permettent aux tâches d'échanger des informations. Un RTOS avec un mécanisme de mise en file d'attente intégré permettra l'échange de messages entre les tâches.
Outils de suivi d'exécution
Avec l'outil de traçage, vous pouvez facilement observer le comportement en temps réel des systèmes en temps réel. Ainsi, votre équipe de développement peut suivre et détecter les éventuelles erreurs et l'exécution des tâches.
RTOS vs GPOS – Faible empreinte mémoire
Étant donné que vous devez intégrer un RTOS dans une plate-forme MCU, le RTOS potentiel doit avoir une faible empreinte mémoire. Cela signifie que la taille totale ne doit pas dépasser 10 % de la taille totale du MCU.
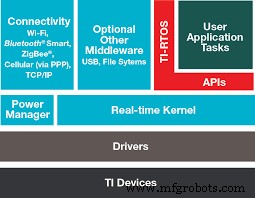
Architecture RTOS
Conclusion
En un mot, RTOS et GPOS fonctionnent bien dans les applications conçues pour eux. Bien que RTOP puisse offrir un débit inférieur à celui du GPOS, cela ne signifie pas que son débit est faible.
Alors que le GPOS gère de nombreux processus lourds, le RTOP gère moins de tâches avec un débit relatif à la charge du système.
Cependant, la principale préoccupation d'un RTOS est de fournir un modèle d'exécution plus prévisible et une exécution rapide, et non un débit élevé. Cependant, l'inverse est le cas pour le GPOS. Eh bien, cela résume tout sur le GPOS vs RTOS. Si vous avez des commentaires ou des questions, n'hésitez pas à nous contacter. Nous serons ravis de vous aider.
Technologie industrielle
- Maintenance conditionnelle :un guide complet
- Guide complet de la maintenance des propriétés
- Un guide complet sur le soudage de l'acier inoxydable
- Comment souder la fonte :un guide complet
- Comment souder l'aluminium - Un guide complet
- Qu'est-ce que les électrodes de soudage ? - Un guide complet
- Un guide complet sur l'acier inoxydable
- Le guide complet de l'impression 3D
- SCR Bt151 :un guide manuel complet