


Optimisation de la détection d'inclinaison/d'angle de haute précision :établissement des performances de base
Dans la première partie de cette série, nous avons examiné la structure interne d'un accéléromètre MEMS de haute précision à 3 axes. Dans ce deuxième article, nous verrons comment acquérir un bon ensemble de données de départ pour établir les performances de base et valider le type de niveaux de bruit à attendre dans les analyses de données ultérieures.
Alors que la sortie analogique d'un accéléromètre peut se connecter à n'importe quel système d'acquisition de données analogiques pour l'analyse des données, les fabricants fournissent souvent des cartes d'évaluation optimisées pour être placées directement dans les systèmes des clients pour faciliter le prototypage avec les systèmes embarqués existants. À des fins d'illustration pour cet article, la carte d'évaluation de petit facteur de forme EVAL-ADXL35x a été utilisée. Pour l'enregistrement et l'analyse des données, l'EVAL-ADXL35x a été connecté à une carte de microcontrôleur SDP-K1 et programmé à l'aide de l'environnement Mbed. Mbed est un environnement de développement open source et gratuit pour les cartes de microcontrôleur ARM. Il dispose d'un compilateur en ligne et permet aux développeurs de démarrer rapidement. La carte SDP-K1, lorsqu'elle est connectée au PC, apparaît comme un lecteur externe. Pour programmer la carte, glissez-déposez simplement le fichier binaire généré par le compilateur dans le lecteur SDP-K1. 3, 4
Une fois que le système Mbed enregistre les données via l'UART, nous disposons désormais d'un environnement de test de base pour essayer des expériences d'accéléromètre et diffuser la sortie vers un simple terminal pour l'enregistrement des données et une analyse plus approfondie. Il est important de noter que quel que soit le débit de données de sortie de l'accéléromètre, le code Mbed n'enregistre que les registres à 2 Hz. Une connexion plus rapide que cela est possible dans Mbed, mais n'entre pas dans le cadre de cet article.
Un bon ensemble de données de départ aide à établir les performances de base et à valider le type de niveaux de bruit auxquels s'attendre dans la plupart de nos analyses de données ultérieures. Utilisation d'un bras-étau articulé PanaVise 5 qui a un support à ventouse permet une surface de travail raisonnablement stable dans une configuration de banc car elle adhère à la surface de travail en verre. La carte ADXL355 (tenue sur le côté) est aussi stable que la paillasse du laboratoire dans cette configuration. Les utilisateurs expérimentés plus avancés peuvent noter que ce support d'étau aurait un certain risque de basculement, mais c'est une méthode simple et rentable qui permet de changer l'orientation par rapport à la gravité. Avec la carte ADXL355 placée dans le support comme illustré à la figure 1, un ensemble de données pendant 60 secondes est capturé pour une première analyse.
cliquez pour l'image en taille réelle
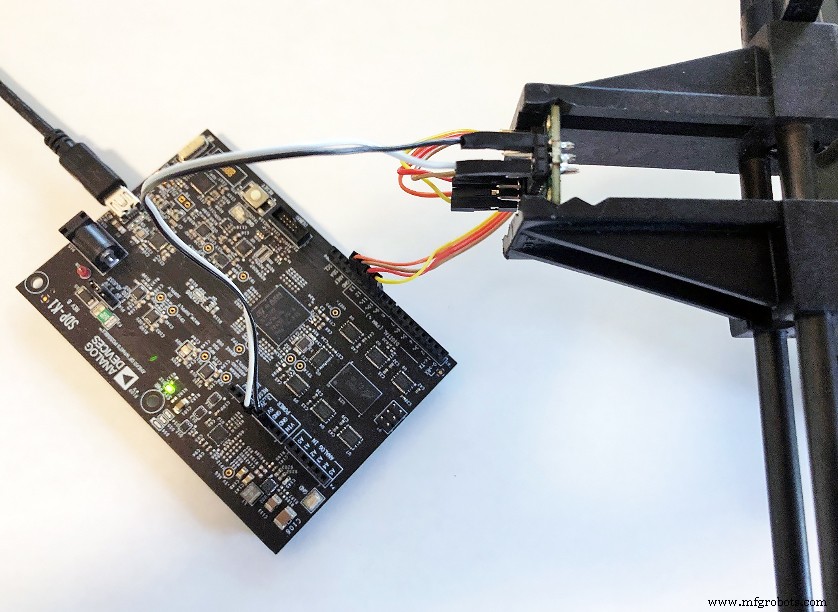
Figure 2. Configuration de test à l'aide d'un support EVAL-ADXL35x, SDP-K1 et PanaVise. (Source :Appareils analogiques)
cliquez pour l'image en taille réelle
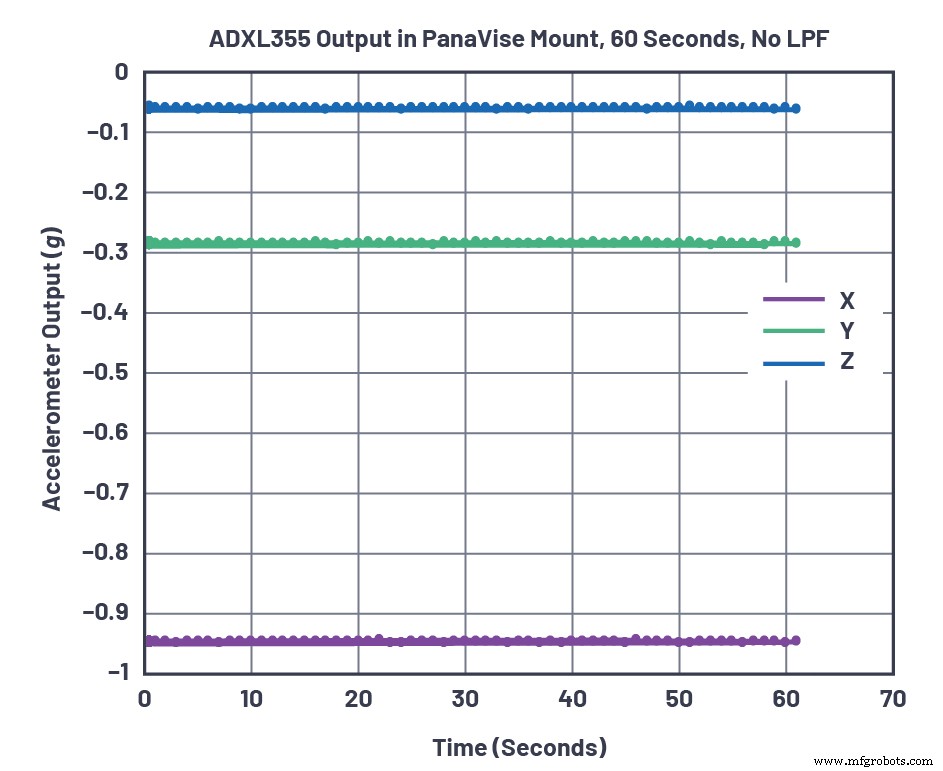
Figure 2. Données ADXL355 sans filtre passe-bas (registre 0x28=0x00), prises sur 1 minute. (Source :Appareils analogiques)
Prendre les 120 points de données et mesurer un écart type montre un bruit de l'ordre de 800 μg à 1,1 mg . D'après les spécifications de performances typiques de l'ADXL355 dans la fiche technique, nous voyons la densité de bruit répertoriée comme 25 µg /√Hz. Avec les paramètres par défaut du filtre passe-bas (LPF), l'accéléromètre a une bande passante d'environ 1000 Hz. Le bruit devrait alors être de 25 µg /√Hz × √1000 Hz =791 µg rms, en supposant un filtre en brique. Ce premier ensemble de données réussit le premier sniff test. Pour être précis, la conversion de la densité spectrale de bruit en bruit efficace doit avoir un facteur pour représenter le fait que le LPF numérique n'a pas de décroissance infinie (c'est-à-dire un filtre en brique). Certains utilisent un coefficient de 1,6 × pour une simple atténuation RC unipolaire de 20 dB/décennie, mais le filtre passe-bas numérique ADXL355 n'est pas un filtre RC unipolaire. Dans tous les cas, supposer un coefficient compris entre 1 et 1,6 nous permet au moins d'obtenir la bonne approximation des attentes en matière de bruit.
Pour de nombreuses applications de détection de précision, 1000 Hz est une bande passante bien trop large pour les signaux mesurés. Afin d'aider à optimiser l'espace commercial entre la bande passante et le bruit, l'ADXL355 dispose d'un filtre passe-bas numérique intégré. Pour le test suivant, nous définissons le LPF à 4 Hz, ce qui devrait avoir une réduction nette du bruit d'un facteur de √1000/√4 ≈ 16. Cela se fait simplement dans l'environnement Mbed en utilisant la structure simple illustrée à la figure 3 , tandis que les données sont illustrées à la figure 4. 6 Après filtrage, le bruit a diminué de manière manifeste, comme prévu. Ceci est montré dans le tableau 1 ci-dessous.
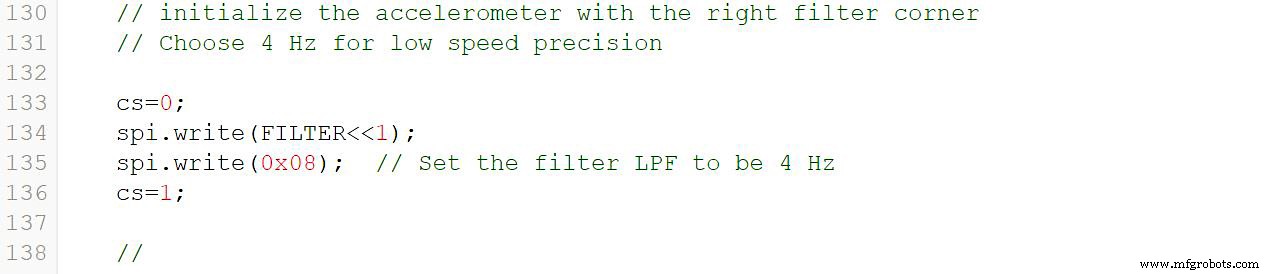
Figure 3. Code Mbed pour la configuration d'un registre. (Source :Appareils analogiques)
cliquez pour l'image en taille réelle
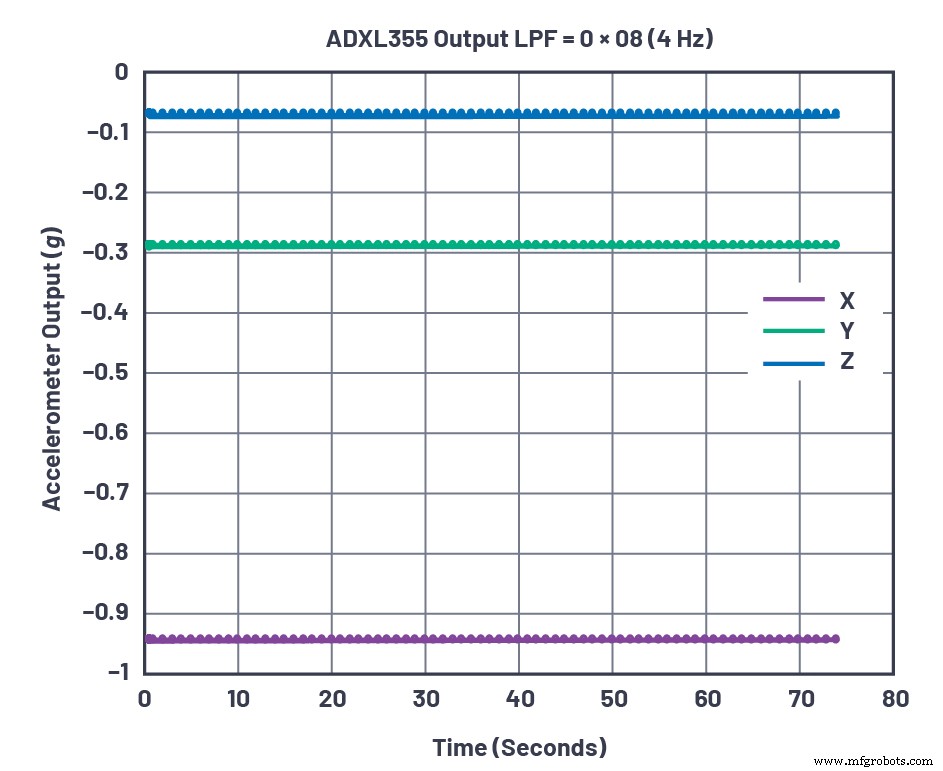
Figure 4. Données ADXL355 avec le LPF réglé à 4 Hz (registre 0x28=0x08), prises sur 1 minute. (Source :Appareils analogiques)
Tableau 1. Bruit attendu et mesuré de l'ADXL355 (Source :Analog Devices)
BruitXYZThéorique(μg)Mesuré
(μg)Théorique
(μg)Mesuré
(μg)Théorique
(μg)Mesuré
(μg)Pas de filtre79192379111397918054 Filtre Hz5058501855063
Le tableau 1 montre que le bruit dans l'axe des y avec la configuration actuelle est plus élevé que prévu par la théorie. Après avoir enquêté sur les causes probables, nous avons remarqué que les vibrations supplémentaires des ventilateurs des ordinateurs portables et autres équipements de laboratoire se manifestent probablement dans l'axe des y sous forme de bruit. Pour tester cela, l'étau a été tourné pour placer l'axe des x dans la position où se trouvait l'axe des y pour ce test et l'axe du bruit le plus élevé s'est déplacé vers l'axe des x. La différence de bruit entre les axes apparaît alors être un bruit d'instrumentation et non une différence intrinsèque des niveaux de bruit à travers les axes de l'accéléromètre. Ce type de test est effectivement le test "Hello World" pour un accéléromètre à faible bruit, il donne donc confiance en des tests supplémentaires.
Afin d'avoir une idée de l'effet qu'aurait un choc thermique sur l'ADXL355, nous avons pris un pistolet à air chaud 7 et le mettre en mode air plus frais (pratiquement quelques degrés au-dessus de la température ambiante) afin d'appliquer des contraintes thermiques à l'accéléromètre. La température est également enregistrée à l'aide du capteur de température embarqué de l'ADXL355. L'expérience a utilisé l'étau pour placer l'ADXL355 verticalement afin qu'un pistolet à air comprimé puisse souffler de l'air en haut de l'emballage. Le résultat attendu de cette expérience est que le coefficient de température de l'offset apparaîtrait à mesure que la matrice chauffe, mais toute contrainte thermique différentielle apparaîtrait presque instantanément. En d'autres termes, si l'axe individuel de détection est sensible à une contrainte thermique différentielle, on s'attend à voir une bosse dans la sortie de l'accéléromètre. La suppression de la valeur moyenne des données lorsqu'elle était calme permet une comparaison facile des trois axes en même temps. Les résultats sont présentés dans la figure 5.
cliquez pour l'image en taille réelle
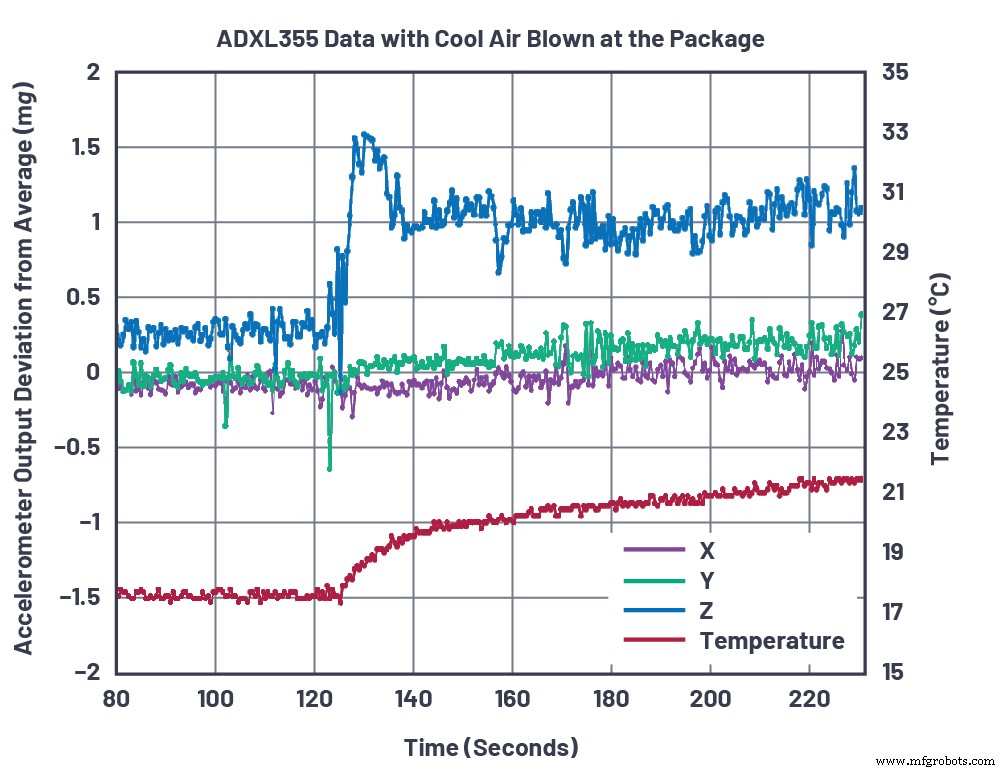
Figure 5. Données de choc thermique ADXL355 utilisant un pistolet à air chaud sur réglage froid. (Source :Appareils analogiques)
Comme on peut le voir sur la figure 5, le pistolet à air soufflait de l'air légèrement plus chaud sur le boîtier en céramique, qui est hermétiquement scellé à l'environnement. Il en résulte un ~1 500 g décalage dans l'axe z, une quantité beaucoup plus petite de décalage dans l'axe y (peut-être ~ 100 µg ), et pratiquement aucun décalage dans l'axe des x. Alors que de nombreux produits clients finaux ont un boîtier au-dessus du PCB qui répartit les contraintes thermiques différentielles, il est important de prendre en compte ces types de contraintes transitoires rapides, qui peuvent se manifester par une erreur de décalage, comme le montre ce test simple.
La figure 6 montre l'effet de polarité opposée lorsque le pistolet à air chaud est éteint.
cliquez pour l'image en taille réelle
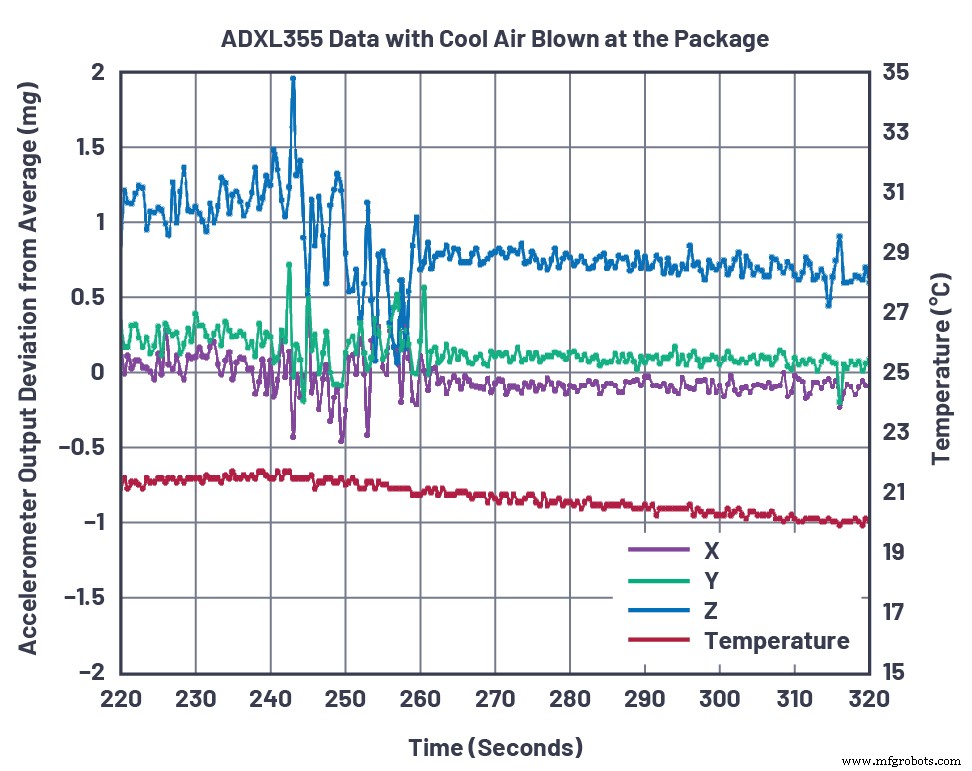
Figure 6. Choc thermique ADXL355 avec un pistolet à air s'arrêtant à t =240 secondes. (Source :Appareils analogiques)
Cet effet est encore plus prononcé lorsque le pistolet à air est utilisé dans le cadre chauffé; c'est-à-dire lorsque le choc de température est plus important. La sortie du pistolet à air Weller est de l'ordre de ~400°C, il est donc important de l'appliquer à distance pour éviter les dommages dus à la surchauffe ou au choc thermique. Dans ce test, l'air chaud a été soufflé à environ 15 cm de l'ADXL355, ce qui a entraîné un choc thermique presque instantané d'environ 40 °C, comme le montre la figure 7.
cliquez pour l'image en taille réelle
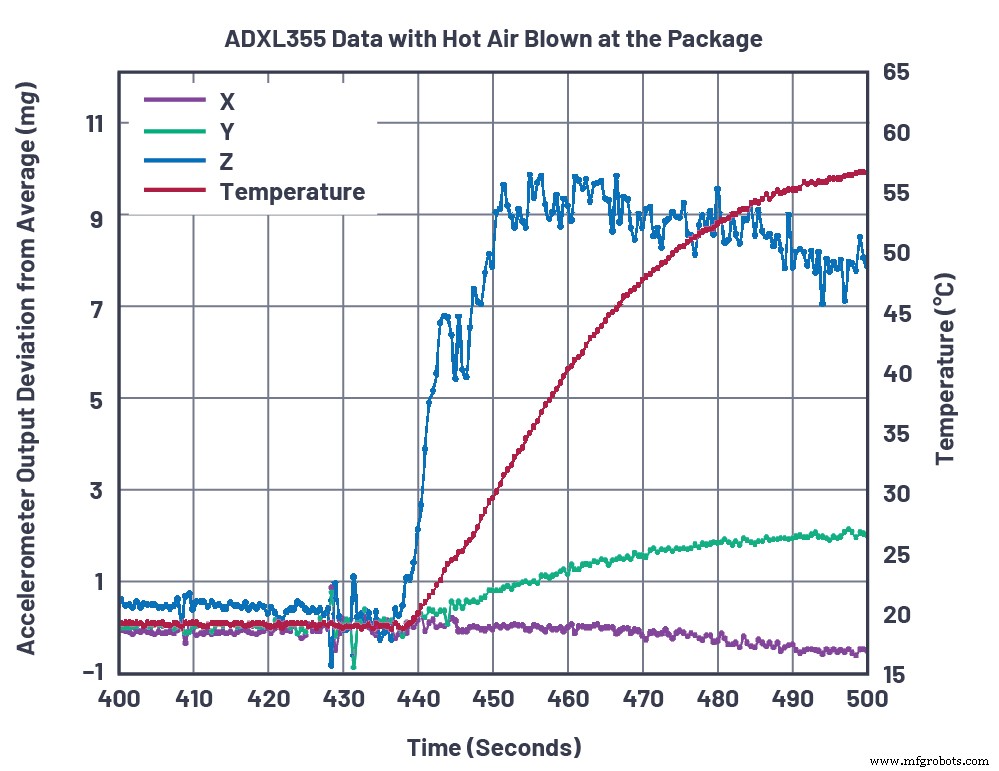
Figure 7. Choc thermique ADXL355 avec un pistolet à air chaud. (Source :Appareils analogiques)
Même si la quantité de choc thermique est assez forte, il est toujours frappant de voir à quel point l'axe z répond plus rapidement dans cette expérience que les axes x et y. En utilisant le coefficient de température décalé de la fiche technique, et avec un décalage de température de 40°C, on s'attendrait à observer environ 100 µg /°C × 40 °C =4 mg décalage, que les axes x et y commencent finalement à montrer. Cependant, notant un 10 mg quasi instantané Le décalage sur l'axe z montre qu'il s'agit d'un effet différent qui est traité plutôt que d'un décalage de décalage dû à la température. Ceci est le résultat d'une contrainte/déformation thermique différentielle sur le capteur et se voit le plus clairement sur l'axe z en raison du fait que ce capteur est plus sensible aux contraintes différentielles que x et y, comme décrit plus haut dans cet article.
Le coefficient de température typique de l'offset de l'ADXL355 (offset tempco) est spécifié à ±100 µg /°C dans la fiche technique. Il est important de comprendre la méthodologie de test utilisée ici, car le décalage tempco est mesuré avec les accéléromètres dans un four. Le four parcourt lentement la plage de température du capteur et les pentes des décalages sont mesurées. Un exemple typique est illustré à la Figure 8.
cliquez pour l'image en taille réelle
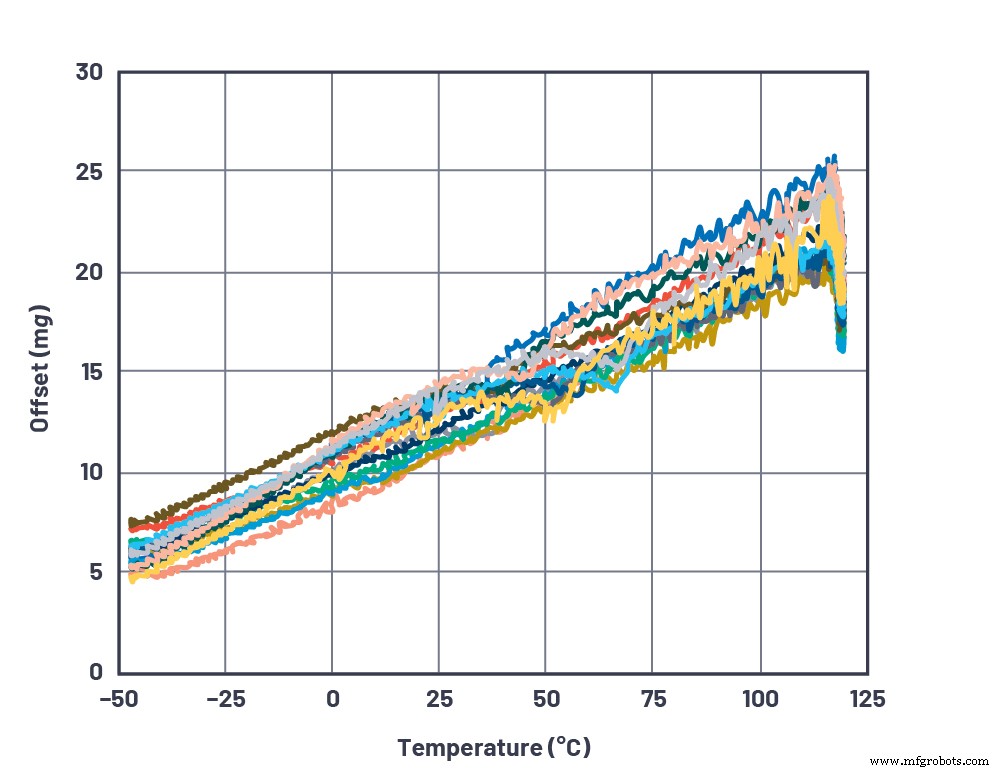
Figure 8. Caractérisation de la température au four de l'ADXL355. (Source :Appareils analogiques)
Il y a deux effets en jeu dans cette intrigue. L'un est le tempco offset tel que caractérisé et documenté dans la fiche technique. Cela peut être interprété comme la valeur moyenne de nombreuses pièces de –45°C à +120°C alors que le four augmente la température à 5°C/min mais sans aucun temps de trempage. Cela serait dérivé de graphiques similaires à la figure 9 et indiquerait environ 18 mg au-dessus de 165°C, soit environ 109 µg /°C, qui se situe légèrement en dehors de la valeur typique de 100 µg /°C, mais dans les limites minimales et maximales spécifiées dans la fiche technique. Cependant, considérez le côté droit de la figure 9 alors que les appareils continuent de tremper à 120 °C pendant environ 15 minutes. Lorsque les appareils sont placés à une température élevée, la quantité réelle de décalage de décalage diminue et s'améliore. Dans ce cas, la valeur moyenne est proche de 10 mg plus de 165°C soit environ 60 µg /°C décalage tempco. Le deuxième effet en jeu est alors la contrainte thermique différentielle lorsque la masse d'épreuve du capteur se stabilise en température sur l'ensemble du dispositif en silicium et la contrainte est alors réduite. C'est l'effet qui est observé dans les tests de pistolets à air illustrés aux figures 6 à 8 et il est important de comprendre que cet effet fonctionne sur une échelle de temps plus rapide que les tempcos de décalage à plus long terme répertoriés dans la fiche technique. Cela pourrait être utile pour de nombreux systèmes qui, en raison de leur dynamique thermique globale, auront probablement une rampe beaucoup plus lente que 5°C/min.
Dans la troisième partie de cette série, nous explorerons d'autres faits affectant la stabilité, puis nous proposerons des recommandations de conception de systèmes mécaniques pour améliorer les performances globales d'un accéléromètre MEMS de haute précision à 3 axes.
Références
1 Chris Murphy. "Choisir l'accéléromètre MEMs le plus adapté à votre application - Partie 1." Dialogue analogique, Vol. 51, n° 4, octobre 2017.
2 Chris Murphy. « Mesure de l'inclinaison de l'accéléromètre au-dessus de la température et en présence de vibrations ». Dialogue analogique, août 2017.
3 Système d'évaluation SDP-K1. Analog Devices, Inc.
4 Mbed :Guide de l'utilisateur pour SDP-K1. Analog Devices, Inc.
5 Support de bras articulé PanaVise. PanaVise.
6 Code Mbed. Analog Devices, Inc.
7 Pistolet à air de chauffage/refroidissement Weller 6966C. Weller.
8 Parylène. Wikipédia.
Embarqué
- Construisez votre infrastructure cloud pour la performance et l'efficacité
- VersaLogic lance un ordinateur embarqué hautes performances basé sur Xeon
- La collecte de données IoT alimente l'agriculture de précision
- MODULE DE DONNÉES :moniteurs à cadre ouvert de grande taille avec une luminosité élevée et une fonction easyTouch
- Six innovations permettant d'améliorer les performances du matériel cryptographique
- TECHWAY :plate-forme Kintex-7 FPGA PCIe pour augmenter les performances de débit de données avec 12 liens HSS
- Abaco :XMC robuste offre 2,3 TeraFLOPS de performances de pointe et prend en charge CUDA et OpenCL
- L'unité commerciale Matériaux Haute Performance de Lanxess devient juridiquement indépendante
- Surveillance des performances :défis, solutions et avantages