


Post-processeurs robots :tout ce que vous devez savoir
Vous ne savez pas quel post-processeur choisir ? Voici 5 étapes pour choisir le post-processeur robot idéal.
Les post-processeurs sont le pont entre le logiciel de programmation hors ligne et votre robot.
Si vous choisissez le bon post-processeur, votre programme fonctionnera immédiatement :le vrai robot se déplacera exactement comme il l'a fait dans la simulation. Cependant, si vous choisissez le mauvais post-processeur, vous vous retrouverez dans une période difficile :le robot peut se déplacer de manière erratique, il peut se déplacer dans la mauvaise direction ou il peut ne pas bouger du tout.
RoboDK fournit un grand nombre de post-processeurs différents parmi lesquels choisir. Cela vaut la peine de se familiariser avec le fonctionnement des post-processeurs, comment choisir le bon et comment personnaliser ou créer votre propre post-processeur si ceux fournis ne vous conviennent pas exactement.
Cet article vous dira tout ce que vous devez savoir sur les post-processeurs de robots dans RoboDK.
Qu'est-ce qu'un post-processeur ?
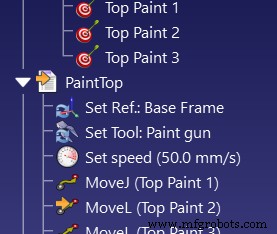
La plupart des programmes de robot contiennent les mêmes commandes de base, qui sont utilisées encore et encore. Les trois plus courants sont :
- Déplacer l'articulation — Cela déplace le robot vers un point de l'espace en envoyant les articulations du robot à la position souhaitée le plus rapidement possible, ce qui est utile lorsque vous vous déplacez dans l'espace libre.
- Déplacement linéaire — Cela déplace le robot de la position actuelle vers un point de l'espace en suivant une ligne précise, ce qui est utile lors d'un déplacement pour ramasser un objet, peindre, etc.
- Définir la vitesse— Cela définit la vitesse de l'effecteur et/ou des articulations du robot.
Un logiciel de programmation hors ligne crée des programmes à l'aide d'une version généralisée de ces commandes (et d'autres) qui peuvent s'appliquer à n'importe quel robot.
Les robots parlent différentes langues
Le problème est que chaque fabricant a une manière différente de programmer les commandes dans ses robots. De nombreux fabricants ont leur propre langage de programmation personnalisé et certains utilisent même des commandes légèrement différentes pour différentes versions de leurs contrôleurs.
Par exemple, voici comment les trois commandes que j'ai énumérées ci-dessus sont exprimées pour différents contrôleurs de robot. Entre parenthèses, j'ai également indiqué le nombre minimum de paramètres et de valeurs requis pour contrôler un robot 6DoF :
| Robot | Déménagement conjoint | Déplacement linéaire | Définir la vitesse | Arrondi de chemin |
| ABB IRC5 | DéplacerJ (4) | MoveL (4) | speeddata(4) | zonedata(4) |
| Fanuc RJ3 | J (2) | L (2) | vitesse (1) | CNT (1) |
| Kawasaki | JDEPLACER (1) | LOVE (1) | VITESSE (1) | PRÉCISION (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Robots universels | movej (1) | déplacer/déplacer (1) | v(1) | r (1) |
Comme vous pouvez le voir, chaque commande est similaire entre chaque type de robot. Cependant, il existe une différence dans la formulation et dans la quantité d'informations requises pour définir chaque instruction.
Sans programmation hors ligne et sans post-processeurs, vous devriez apprendre un tout nouveau langage de programmation chaque fois que vous programmez un nouveau type de robot. Cela ralentit considérablement la programmation du robot.
Les post-processeurs facilitent la tâche
Les post-processeurs fonctionnent en traduisant les commandes en un programme spécifique pour votre modèle de robot.
Avec RoboDK, vous n'avez pas besoin d'apprendre un langage de programmation pour faire bouger votre robot. Les post-processeurs fournis sont généralement suffisants pour générer du code utilisable et sans bug pour plus de 30 marques de robots.
Le post-processeur génère également tout le code d'initiation nécessaire et les définitions de variables, qui sont souvent gênantes à définir dans la programmation textuelle habituelle.
5 étapes pour choisir le post-processeur idéal
RoboDK est livré avec plus de 40 post-processeurs. Vous devez choisir le bon post-processeur pour votre contrôleur de robot.
Comment les choisir ?
Si vous avez utilisé l'un des robots de notre bibliothèque de robots, vous constaterez qu'un post-processeur est déjà sélectionné par défaut. Souvent, cela suppose que vous utilisez le contrôleur le plus récent (ou par défaut) pour ce robot. Cependant, vous devrez peut-être en sélectionner un autre si le message par défaut ne répond pas aux besoins de votre application ou de votre configuration.

1. Choisissez le post-processeur pour votre marque de robot
Généralement, il est préférable d'essayer d'abord le post-processeur par défaut ou le plus basique.
Certaines marques de robots n'ont qu'une seule option fournie par défaut dans RoboDK, par ex. Mecademic, Kawasaki, CLOOS, etc. Dans ce cas, votre choix est très simple.
2. Choisissez le post-processeur pour votre contrôleur
Certaines marques de robots ont différents post-processeurs pour différents contrôleurs ou versions de leur langage de programmation. Par exemple, Denso a un post-processeur pour ses anciens contrôleurs RC7 et un pour ses nouveaux contrôleurs RC8, car entre ces modèles, ils sont passés de la programmation dans le langage de programmation PAC à la programmation dans PacScript.
Utilisez le post-processeur pour votre contrôleur spécifique s'il en existe un. S'il n'y a pas d'option pour votre contrôleur spécifique, essayez celui qui est le plus proche du numéro de version de votre contrôleur.
3. Choisissez le post-processeur pour votre application
Certaines marques de robots ont plusieurs post-processeurs différents. KUKA en a 10 !
Certains des post-processeurs supplémentaires sont destinés à des applications ou des configurations spécifiques. Par exemple, il existe 5 post-processeurs pour le contrôleur KUKA KRC2. Deux d'entre eux sont destinés aux applications utilisant leur module complémentaire de fraisage CamRob ou la commande CNC KUKA, qui permet d'avoir des milliers de lignes de code dans un seul fichier de programme (adapté à l'usinage par robot). L'un est spécifiquement destiné aux applications de soudage à l'arc. De même, il existe un post-processeur UR qui intègre les préhenseurs Robotiq.
S'il existe un post-processeur pour votre contrôleur qui convient à votre application ou configuration spécifique, utilisez-le. Cependant, s'il n'y en a pas pour votre application, utilisez simplement le post-processeur de base pour votre marque et votre contrôleur.
4. Choisissez le post-processeur que vous pouvez facilement mettre à jour
Parfois, le programme généré par RoboDK ne sera pas exactement adapté à votre application. Vous voudrez peut-être ajouter des lignes de code supplémentaires pour étendre la fonctionnalité. C'est très facile à faire si vous êtes un peu familier avec le langage de programmation de votre robot.
Quelques-uns des post-processeurs sont fournis pour faciliter la modification et la mise à jour du code généré.
Par exemple, le KUKA KRC2 a des options qui génèrent un fichier DAT. Il s'agit d'une caractéristique intéressante du contrôleur KUKA. Dans cette configuration, les positions sont stockées sous forme de variables dans un fichier DAT séparé, ce qui peut parfois faciliter la mise à jour du code car il vous suffit de modifier les variables pour modifier les positions.
De même, il existe deux post-processeurs Siemens Sinumerik :l'un où les positions sont fournies en millimètres et l'autre où elles sont fournies en pouces.
Choisissez le post-processeur qui vous permet de mettre à jour le code du robot aussi facilement que possible, si nécessaire.
5. Créer ou personnaliser un post-processeur
Dans certaines circonstances, vous devrez peut-être écrire votre propre post-processeur, par exemple lorsque vous utilisez votre robot dans une configuration unique.
Vous pouvez également personnaliser un post-processeur existant pour votre configuration ou application spécifique.
Il est très facile d'écrire des post-processeurs personnalisés dans RoboDK car tous sont des programmes Python et sont écrits dans un format similaire.
Vous pouvez voir un tutoriel simple qui montre comment créer ou mettre à jour un post-processeur dans cette vidéo.
Consultez la page du post-processeur dans notre documentation pour plus de détails.
Quelles questions avez-vous sur les post-processeurs ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn , Twitter , Facebook ou Instagram .
Robot industriel
- Cloud computing :tout ce que vous devez savoir
- Conteneurs vs sans serveur ; Tout ce que vous devez savoir !
- Maintenance externalisée en un coup d'œil :tout ce que vous devez savoir
- Tout ce que vous devez savoir sur les dispersions de pigments
- Stratégie de planification des capacités – Tout ce que vous devez savoir
- Tout ce que vous devez savoir sur l'IoT en maintenance
- 9 étapes pour forger un couteau :tout ce que vous devez savoir
- Tout ce que vous devez savoir sur les dessins techniques
- Tout ce que vous devez savoir sur le moulage des métaux