


Types d'articulations de robots :un guide détaillé
Source :www. idtechex.com
L'automatisation dans l'industrie manufacturière prend rapidement de l'ampleur, de plus en plus d'entreprises adoptant l'utilisation de la robotique. Cela est attribué aux avantages de l'automatisation dans les entreprises et à l'utilisation de processus plus intelligents et plus intelligents. Vous obtenez plus de production et réduisez également le risque de blessures dans l'usine de fabrication. La plupart des entreprises se tournent vers l'utilisation de bras robotisés pour prendre en charge le pick &place, l'emballage, la peinture et l'assemblage, entre autres tâches.
Source :www. researchgate.net
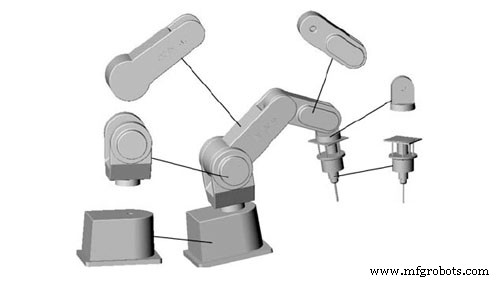
Les articulations du robot font référence aux composants mobiles du robot qui entraînent des mouvements relatifs entre les liens adjacents. Dans ce contexte, des liens sont utilisés pour désigner les éléments rigides reliant les joints pour un fonctionnement clair et adéquat. Cela montre que le bras robotique industriel utilise une combinaison de liens et d'articulations pour une fonctionnalité optimale. Il est essentiel de s'assurer que les articulations de votre manipulateur fonctionnent en conséquence pour garantir la précision et l'exactitude lors d'une application.
Les articulations robotiques sont également parfois appelées axes. Ils sont essentiels et utiles pour garantir que le mouvement du bras n'est pas limité ou entravé. En savoir plus sur les articulations robotiques vous aidera à déterminer le type de bras robotique avec lequel vous souhaitez travailler en fonction des tâches que vous souhaitez effectuer. Source :www. britannica.com
Étant donné qu'il existe différents types de robots utilisés dans l'industrie manufacturière, vous trouverez également une variété de joints mécaniques. Ces articulations diffèrent en termes de mouvement et également d'application, notamment en ce qui concerne le type de robot à utiliser.
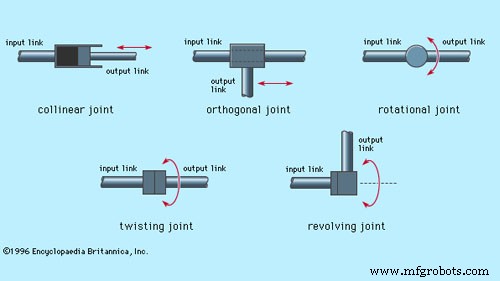
En ce qui concerne les articulations mécaniques présentes dans les bras robotiques, il existe cinq types principaux que vous devez prendre en compte. Deux des articulations sont linéaires, ce qui signifie que le mouvement relatif entre les liens adjacents est de translation. D'autre part, les trois autres sont rotatifs, ce qui signifie que le mouvement relatif des maillons implique des rotations entre eux. Les cinq types d'articulations mécaniques pour robots incluent :
Dans les joints linéaires, le mouvement relatif présenté par les liens adjacents est censé être parallèle. Cela signifie que les liens d'entrée et de sortie glissent dans un mouvement linéaire. Ce type de mouvement se traduit par un mouvement de translation. Ce type de mouvement linéaire peut être réalisé de plusieurs manières, y compris l'utilisation du mécanisme télescopique et du piston. Ce type de joint est également appelé joint en L.
Les joints orthogonaux sont également communément appelés joints toriques de type. Ils présentent un mouvement relatif pris par le lien d'entrée et le lien de sortie. Ce type de mouvement impliqué dans les articulations orthogonales est un mouvement de glissement de translation. Cependant, contrairement à la disposition des joints linéaires, avec le joint orthogonal, le lien de sortie est perpendiculaire au lien d'entrée.
En ce qui concerne les articulations de rotation, vous trouverez l'utilisation de mouvements relatifs de rotation qui sont utiles pour les manipulateurs de robots travaillant sur plusieurs espaces de travail. Ces déplacements s'effectuent avec l'axe de rotation perpendiculaire aux axes des liaisons d'entrée et de sortie. Ces joints de rotation sont également appelés joints de type R.
Ce type de joint présente un mouvement rotatif qui entraîne également un certain degré de rotation lors de l'utilisation. Le mouvement dans ces articulations est relatif à l'axe de rotation qui est perpendiculaire aux axes des liaisons d'entrée et de sortie. Les joints de torsion sont également appelés joints de type T.
Dans les joints tournants, les choses sont un peu différentes par rapport aux autres. Ces articulations présentent également un mouvement de rotation qui s'avère utile dans différentes applications. Le mouvement de ces articulations présente un mouvement entre les deux liens. L'axe de la liaison d'entrée est conçu pour être parallèle à l'axe de rotation de l'articulation. D'autre part, l'axe de la liaison de sortie est conçu pour être perpendiculaire à l'axe de rotation de l'articulation. Ce type de joint est également appelé joint de type V. Source :www. revuetechnologique.com
Différents robots utiliseront différents types d'articulations mécaniques. En savoir plus sur les différents robots vous mettra dans une meilleure position pour investir dans un robot qui fonctionne pour vous. Voici quelques-uns des robots les plus courants à considérer :
La conception du robot articulé viendra très probablement avec différentes gammes et combinaisons de joints rotatifs. Cette gamme peut comporter des structures simples à 2 joints et évoluer vers des structures plus complexes avec 10 joints ou plus. Avec cette conception, le bras est relié à la base à l'aide d'une articulation torsadée tandis que les liens dans le bras sont reliés par des articulations rotatives.
Avec les robots cartésiens, la conception comporte l'utilisation de trois joints linéaires. Ces articulations sont présentées sur le plan cartésien qui implique X, Y et Z. Ces robots peuvent également comporter un poignet attaché avec des articulations de rotation plus faciles pour le mouvement. Ce type particulier de robot est également appelé rectiligne ou portique.
Le robot cylindrique comporte un joint rotatif qui est attaché à la base et un joint linéaire utilisé pour connecter les différents liens. Étant donné que les robots cylindriques travaillent dans une étendue de travail de forme cylindrique, le mouvement de rotation et linéaire est utile pour garantir la précision.
Dans la conception polaire des robots, le bras est relié à la base à l'aide d'une articulation torsadée. Parfois, vous trouverez également l'utilisation d'une combinaison de deux joints rotatifs et d'un joint linéaire. Étant donné que ce robot est également appelé robot sphérique, la portée de travail à présenter sera également sphérique. Les axes utilisés dans ce robot forment un système de coordonnées polaires qui permet au manipulateur de travailler avec facilité.
Le robot SCARA est une option populaire parmi de nombreux fabricants, en particulier ceux qui cherchent à automatiser leurs processus d'assemblage. Ce robot est généralement cylindrique et fonctionne dans une étendue de travail relativement cylindrique. Il comporte l'utilisation de deux joints parallèles qui sont pratiques dans le processus d'assemblage. Ces articulations assurent la conformité dans un plan sélectionné lorsque le robot est en cours d'utilisation.
Les robots delta sont conçus avec une construction en forme d'araignée qui leur permet d'offrir d'excellents services à leurs utilisateurs. Ils sont construits à partir de parallélogrammes accolés et reliés à une base commune. Les articulations présentes sur ce type de robot sont à la fois rotatives et linéaires. Cela permet au robot de déplacer une seule extrémité de l'outillage du bras dans une zone de travail en forme de dôme. Il améliore ses performances pour garantir que le développement des différentes tâches est effectué avec précision.
Lorsque vous travaillez avec la robotique comme moyen d'automatiser différents processus dans votre entreprise, vous devez garder à l'esprit les différents aspects. Ces aspects jouent un rôle énorme dans les performances de la robotique spécifique que vous choisissez d'utiliser. Lorsqu'il s'agit d'utiliser des bras robotiques industriels, les articulations du robot devraient être un élément sur lequel rester à jour.
Apprenez à connaître les différentes articulations et comment elles affectent les performances du robot. Cela vous aidera à évaluer le type d'articulations qui conviendra le mieux aux activités que vous souhaitez automatiser. Une fois que vous avez cela, vous pouvez alors investir dans des bras de robot fournis avec les articulations pour lesquelles vous êtes sur le marché. Prenez votre temps et travaillez avec des fabricants d'équipements d'automatisation qui vous aideront. 
Lorsque vous incorporez des bras robotiques dans votre entreprise, assurez-vous de travailler avec un fabricant de bras robotiques de qualité qui vous offrira le meilleur. De plus, il est également essentiel d'avoir une compréhension de base de ce qu'ils impliquent. Le bras robotique comprend le corps, le poignet et l'effecteur terminal qui ont des fonctions spécifiques. Pour que ces différentes pièces fonctionnent avec précision, il faut la présence d'articulations de robots. Dans cet article, nous allons approfondir les différentes articulations robotiques pour vous donner une meilleure compréhension. Table des matières
Que sont les Robot Joints ?
Types de joints mécaniques pour robots
Joints linéaires
Joints orthogonaux
Joints de rotation
Joints de torsion
Joints tournants
Différents types de robots et les articulations mécaniques utilisées

Articulé
Cartésien
Cylindrique
Polaire
SCARA
Delta
Conclusion
Robot industriel
- Types de données C++
- Types de données C
- c'est SFM dans l'usinage ?
- Top 10 des fabricants de robots industriels en 2020
- Robots industriels - Le guide ultime
- Robotique dans la fabrication automobile
- Système d'entrepôt de robots :qu'est-ce que c'est et comment il est utilisé
- Pince de robot :qu'est-ce que c'est et comment c'est utilisé pour les robots
- L'automatisation industrielle