


Automatisation de vos processus via le tri sélectif :voici ce qu'il faut rechercher
Pourquoi lisez ceci : Le tri des bacs est l'un des processus d'automatisation les plus difficiles depuis des années. Bien que la technologie puisse optimiser votre production de plusieurs manières, certaines tâches peuvent encore être trop complexes à gérer. Cet article présente les processus qui pourraient être automatisés grâce au tri des bacs, les défis potentiels et leurs solutions.
Qu'est-ce que le tri sélectif ?
L'objectif du ramassage des bacs est de ramasser des objets similaires qui sont placés et orientés au hasard à partir d'un bac, à l'aide d'un système de vision, d'un robot et d'une pince. Le système de vision effectue généralement une numérisation 3D de l'objet donnant son nuage de points (ensemble de points dans l'espace qui constituent un objet) et le reconnaissant ainsi.
Ensuite, le robot est conduit dans le bac, ramasse l'objet, sort du bac et se dirige vers la cible de placement, généralement une boîte ou un autre appareil.
Défis et solutions pour la partie robotique du processus de ramassage des bacs
Certains articles seront difficiles à atteindre
Un problème majeur avec le ramassage des bacs est l'incapacité du robot à ramasser toutes les pièces du bac. Ramasser 80 à 85 pour cent d'entre eux est gérable car le système de vision commandera au robot de ramasser les objets qui sont faciles à saisir (par exemple ceux qui sont assis sur le dessus).
Le plus difficile est d'arriver à saisir les derniers objets qui s'entrecroisent ou se reposent dans un coin de la poubelle. Cela peut être résolu de deux manières. La première implique de redessiner la poubelle, en lui donnant une forme plus pratique. Par exemple, une forme conique garderait toutes les pièces au milieu à tout moment.
Une deuxième solution serait de secouer le bac (par exemple automatiquement à l'aide d'un moteur) afin que les positions et les orientations des pièces soient réarrangées et non plus mélangées. La caméra les identifierait alors plus facilement.
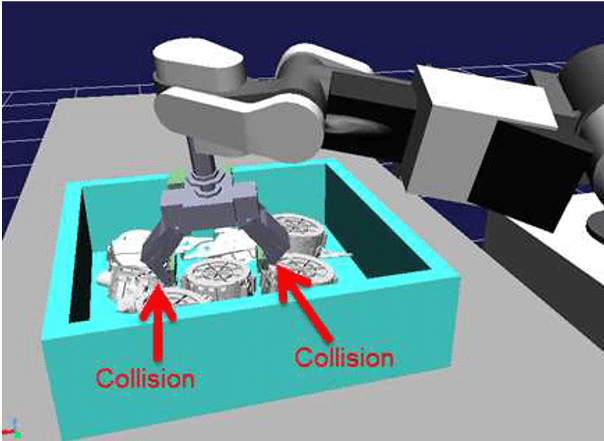
Les pinces peuvent endommager les objets collectés
Un autre problème est le risque de collision de la pince avec le reste des objets en essayant d'en saisir un. La stratégie de prélèvement doit être précise afin d'éviter d'endommager les pièces restantes (en particulier les plus fragiles).
Une solution à cela est un algorithme de planification de chemin précis avec évitement d'obstacles. La planification du chemin en robotique est le processus consistant à trouver le chemin continu optimal du point A au point B. Si l'évitement d'obstacles est également inclus, la même tâche est effectuée sans heurter aucun obstacle.
Il peut arriver que les objets dans le bac soient de forme ou de nature différente (par exemple des pommes et des oranges). Dans ce cas, une pince souple ou une pince à vide avec ventouses peut être utilisée pour s'adapter à n'importe quelle taille et forme.

Défis et solutions pour la partie vision du processus de ramassage des bacs
Le système de vision d'une solution de tri sélectif peut inclure des caméras 2D ou 3D. Il va sans dire que les caméras 3D (doubles caméras qui créent une image 3D) sont plus chères, mais elles sont plus efficaces. De plus, des scanners laser 3D qui produisent les nuages de points susmentionnés peuvent être utilisés.
La foudre, l'occlusion et la détection des contours peuvent compliquer le processus
Les problèmes récurrents de vision incluent l'éclairage, l'occlusion et la détection des contours. Ils s'appliquent aux systèmes de vision 2D et 3D.
Éclairage signifie que des ombres sont projetées de chaque objet au reste, de sorte que la caméra a du mal à les détecter. Il peut être résolu en fournissant à la scène un éclairage supplémentaire qui pourrait être fixé à côté de la caméra ou sur le poignet du robot.
Occlusion a lieu lorsque l'objet n'est pas entièrement visible par la caméra, car un autre objet est placé dessus. Encore une fois, secouer le bac peut être utile dans ce cas, afin que l'objet puisse être détecté plus facilement.être détecté plus facilement.
Détection des contours est le défi de déterminer le périmètre de contour (bords) d'un objet. Cela devient encore plus difficile lorsqu'un grand nombre d'objets sont placés les uns à côté des autres, comme dans le cas du ramassage des bacs. La solution à ce problème dépend du logiciel et des méthodes utilisées.
Comment détecter le potentiel d'automatisation de vos processus grâce au tri sélectif
Si vous envisagez d'automatiser les processus dans votre entreprise à l'aide de la sélection des bacs, les points suivants pourraient suggérer un potentiel d'automatisation :
- Nombre élevé de petites pièces : Si le système est correctement configuré, le robot peut ramasser ces pièces (telles que des vis ou des rondelles) rapidement et de manière robuste.
- Articles non commandés : Processus où il n'est pas possible de recevoir des articles dans l'ordre d'un processus précédent ou d'un sous-traitant. Dans la plupart des cas, il sera plus efficace de demander que les articles soient livrés de manière structurée, et ainsi d'éviter complètement le picking.
- Pièces qui ont une surface mate. Si les pièces sont très réfléchissantes, telles que les pièces métalliques usinées, la foudre peut poser des problèmes. La plupart des systèmes de caméra auront du mal à trouver les articles pour le ramassage des bacs.
- Un processus où le temps de cycle est supérieur à environ 10 secondes , et de préférence avec un tampon pour les pièces prélevées. Il faudra un certain temps à un système de tri des bacs pour trouver et prélever chaque article.
Conclusion
Pour les développeurs, le ramassage des poubelles est vraiment le Saint Graal. Pour les clients, ce n'est peut-être pas le cas. En règle générale, il peut être judicieux d'essayer d'éviter d'utiliser des solutions de tri des bacs, en s'assurant simplement que le format de livraison des articles est ordonné, au lieu d'être aléatoire dans un bac.
Cela ajoute généralement un peu de coût, mais c'est souvent moins cher et permet un traitement plus rapide que l'utilisation du ramassage des bacs.
Cependant, dans certains cas, cela n'est pas possible, ou très coûteux. Dans ces cas, c'est génial de pouvoir utiliser le ramassage des bacs.
Si l'un de vos processus coche les quatre points précédents, il pourrait être très bien adapté pour le ramassage des bacs. Au moment de trouver la solution à utiliser, sachez que certaines solutions sont encore très expérimentales, alors que d'autres ont eu plusieurs années pour mûrir et prouver leur robustesse.
Robot industriel
- Ce que vous devez rechercher dans une cellule de travail robotique préfabriquée
- Que rechercher chez un partenaire de fabrication d'uréthane
- Qu'est-ce qui convient à votre charge ? Moteur à courant alternatif et moteur à courant continu
- Ce qu'il faut rechercher dans une entreprise de réparation d'équipement de construction
- Ce qu'il faut rechercher chez un fabricant de circuits imprimés :partie 2
- Ce qu'il faut rechercher dans une presse plieuse d'occasion
- Ce qu'il faut rechercher lors de l'achat d'un ferronnier
- Ce qu'il faut rechercher chez un partenaire d'équipement de fabrication
- Ce qu'il faut rechercher chez un courtier en machines