Robinet sans contact avec système de contrôle de porte pour COVID-19
Composants et fournitures
 | | × | 1 | |
 | | Planche à pain sans soudure demi-taille |
| × | 1 | |
 | | Capteur à ultrasons - HC-SR04 (Générique) |
| × | 1 | |
| | × | 1 | |
 | | × | 1 | |
 | | Adafruit RGB rétro-éclairé LCD - 16x2 |
| × | 1 | |
| | × | 1 | |
| | × | 1 | |
 | | Câbles de raccordement mâle/femelle |
| × | 1 | |
| | Câbles de raccordement mâle/mâle |
| × | 1 | |
Applications et services en ligne
À propos de ce projet
COVID-19 est une grave pandémie en ce moment. Le coronavirus se propage rapidement et facilement entre humains. Il existe des moyens de freiner la propagation de ce virus et un moyen consiste à se laver les mains avec du savon pendant au moins 20 secondes. Parfois, si la personne touche négligemment le robinet - qui pourrait être contaminé - après s'être lavé les mains, elle a plus de chance de contracter cette maladie à coronavirus. Si vous sortez, vous pouvez vous laver les mains en toute sécurité avant d'entrer dans vos locaux. Vous n'avez pas besoin de toucher la poignée de porte car le système de verrouillage de la porte est automatisé. Dans mon projet, une personne n'aura accès qu'une fois qu'elle s'est lavé les mains.
La personne pourrait porter des masques faciaux lorsqu'elle se rend dans des lieux publics, mais ses mains peuvent ne pas être propres. Même s'il/elle se nettoie les mains, ils pourraient toucher la surface qui a été touchée par un porteur de virus. Les mains du porteur du virus seraient contaminées. Le coronavirus pourrait durer sur une surface contaminée de plusieurs heures à plusieurs jours en fonction des conditions environnementales telles que l'humidité et la température. En se lavant les mains avant d'entrer dans les locaux, ce mode de propagation du coronavirus pourrait être évité.
Dans ce projet, j'ai réalisé un prototype pour se laver les mains en toute sécurité avec un système de contrôle de porte automatique. J'ai fabriqué un robinet sans contact pour que vous n'ayez pas à toucher la surface du robinet et qu'il soit automatique. Le prototype est bon marché - ne coûte qu'environ 11 $ à construire - et facile à fabriquer. Ce robinet est automatique et pourrait également éviter le gaspillage d'eau lorsqu'il n'est pas utilisé.
J'ai réalisé ce prototype en utilisant les ressources de mon domicile car je ne pouvais pas sortir à cause du confinement dans mon pays. Vous êtes autorisé à refaire ce projet ou même à l'améliorer, mais vous pouvez également essayer de convertir n'importe quel récipient d'eau en robinet. Je vous suggère d'utiliser une électrovanne d'eau au lieu de la pompe à eau submersible. Le tube est modélisé comme le robinet dans ce prototype. Ce modèle pourrait être utilisé dans les centres commerciaux, les bureaux et votre maison. Ce modèle pourrait être utilisé dans des endroits avec des portes coulissantes automatiques ou un système de porte automatique, en remplaçant le module de relais à canal unique par un module de relais à semi-conducteurs.
Ce prototype pourrait également être utilisé comme distributeur automatique de désinfectant pour les mains à base d'alcool, mais lors de l'utilisation du désinfectant pour les mains, le récipient doit être fermé car l'alcool pourrait s'évaporer.
Voici une vidéo montrant le fonctionnement de ce prototype :
Comment ça marche 



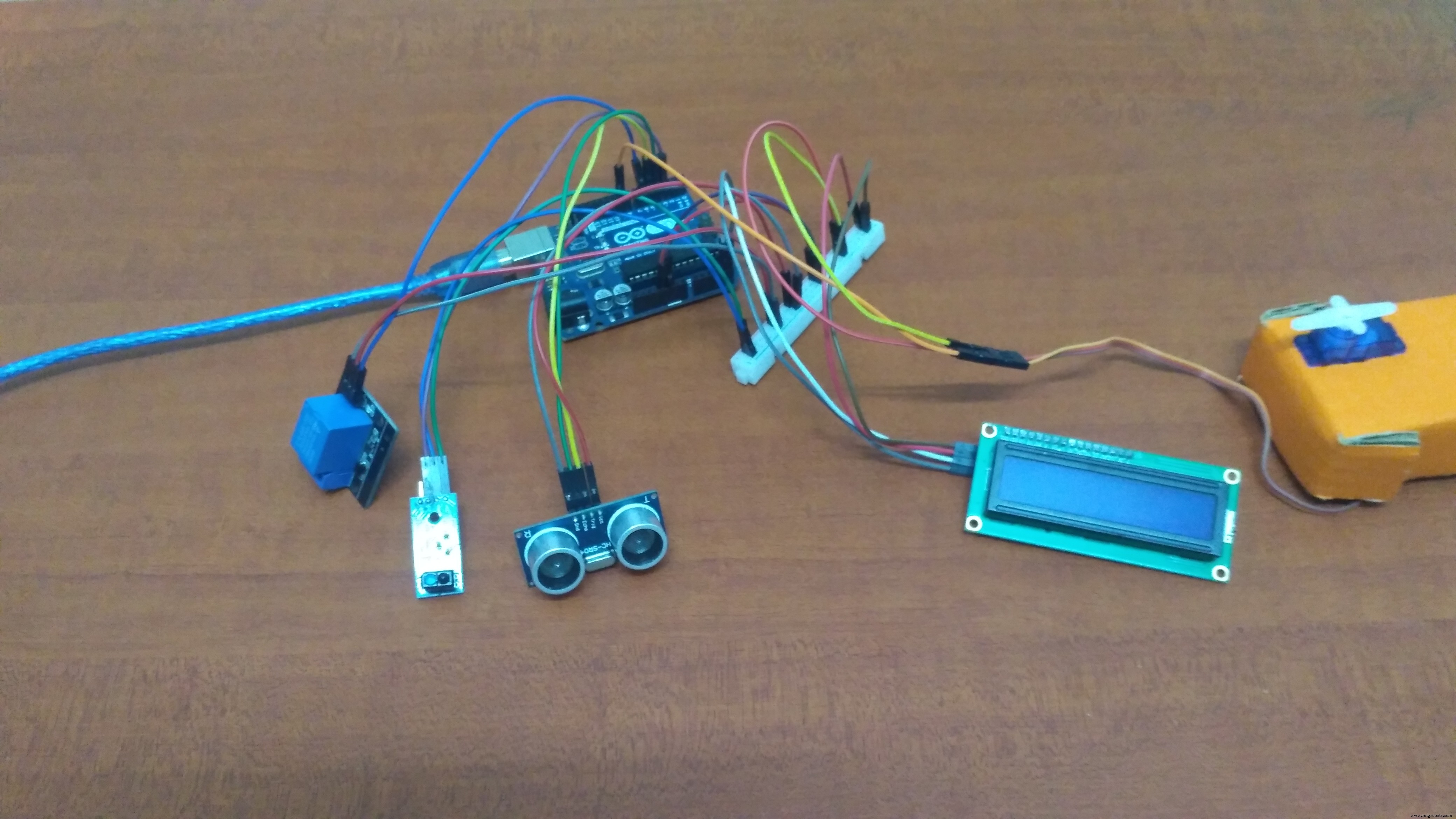
Si vous souhaitez vous laver les mains, placez vos mains à moins de 15 cm du capteur à ultrasons. Selon mon programme Arduino, cela allumera le module relais. La pompe à eau submersible est connectée au module relais et à une alimentation externe. L'alimentation externe peut être ajustée pour fournir la tension appropriée. La pompe à eau est allumée et l'eau est pompée du récipient vers vos mains à travers un tube, qui est modélisé comme le robinet de ce prototype.
Après vous être lavé les mains, placez votre main devant le capteur de suivi IR. Le capteur IR envoie un signal FAIBLE lorsqu'un objet est détecté à moins de 2 cm. Le signal LOW fait tourner le servomoteur de 90° et ouvre la porte (dans ce modèle). La porte se fermera automatiquement après 10 secondes.
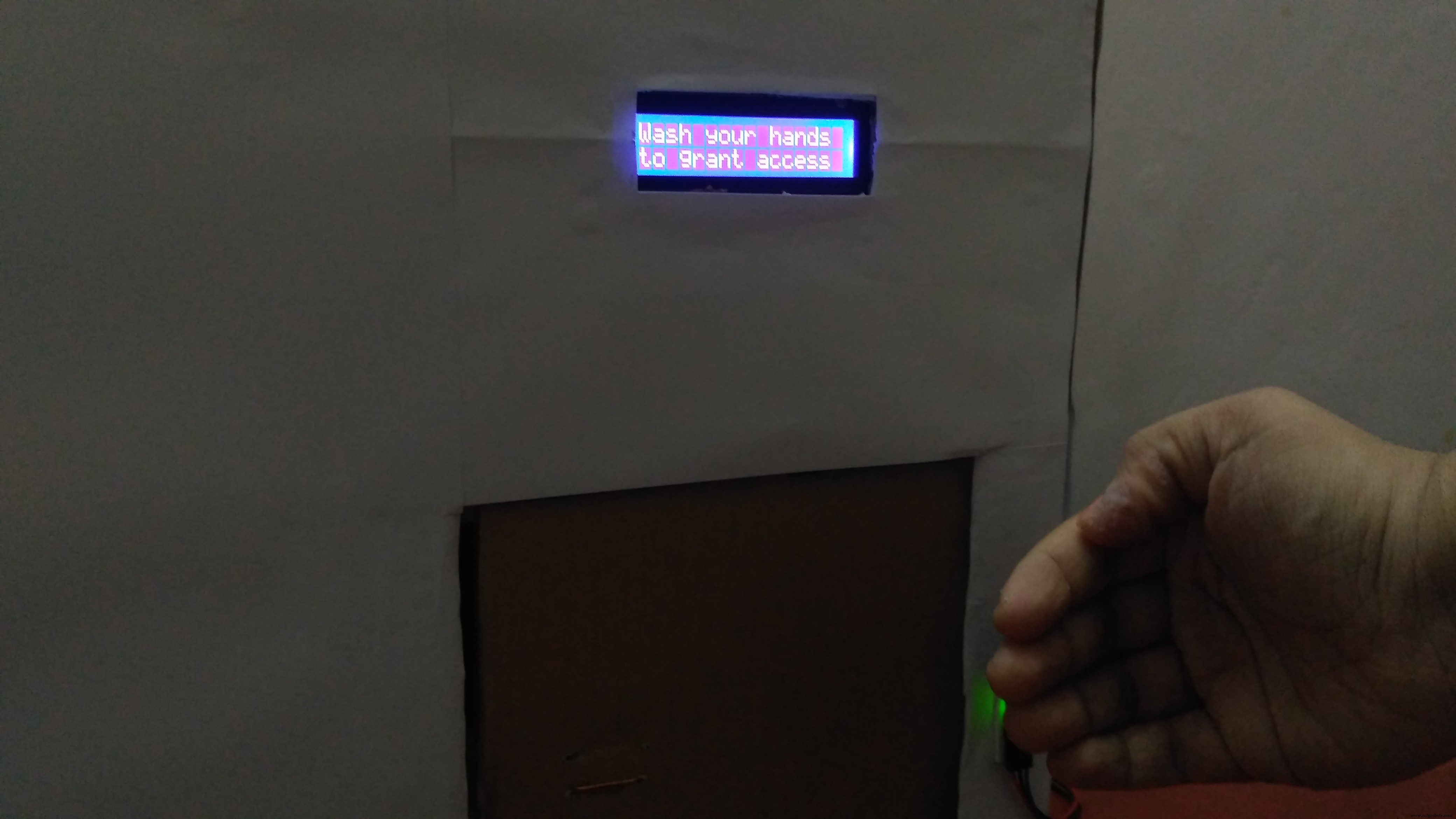
Si vous placez votre main devant le capteur de suivi infrarouge sans vous laver les mains, la porte ne s'ouvrira pas et le module d'affichage LCD affichera un message vous demandant de vous laver les mains.
Code
- Robinet sans contact avec système de contrôle de porte
Robinet sans contact avec système de contrôle de porteArduino
Le code dont vous aurez besoin pour faire fonctionner ce projet avec succès// ROBINET SANS TOUCHE AVEC SYSTÈME DE COMMANDE DE PORTE// PROJETS ARDUINO PAR R// AUTEUR :RUCKSIKAA RAAJKUMAR#include #include # inclure LiquidCrystal_I2C lcd (0x27, 16, 2);#define trig 5#define echo 4Servo servo;const int sensor =3; const int Relais =6;état int;valeur int; longue durée;int distance;void setup() { lcd.begin(); lcd.print("Lavez-vous les mains"); lcd.setCursor(0,1) ; lcd.print("avant d'entrer"); attache.servo(9) ; // Le servomoteur est connecté à D9 pinMode(trig, OUTPUT); // Définir la broche de déclenchement comme OUTPUT pinMode(echo, INPUT); // Définir la broche d'écho comme INPUT pinMode(sensor, INPUT); // Configurez la broche du capteur IR comme INPUT pinMode (Relay, OUTPUT); // Configurer la broche du module relais comme OUTPUT Serial.begin(9600); // Définir le débit en bauds comme 9600}boucle vide() { digitalWrite(trig, LOW); délaiMicrosecondes(5) ; digitalWrite(trig, HAUT); // Réglez la broche de déclenchement HIGH pour envoyer l'onde ultrasonore (impulsion) delayMicroseconds (10) ; digitalWrite(trig, LOW); value=digitalRead(capteur); // Lire le signal numérique envoyé par le capteur IR et le stocker dans la variable 'value' duration =pulseIn(echo, HIGH); // Calcule le temps mis (en microsecondes) pour que l'impulsion émise par la broche de déclenchement atteigne la broche d'écho. distance =(durée/2) * (331,3/10000); // Calculer la distance du capteur à l'obstacle en cm, en utilisant la vitesse du son dans l'air (m/s) et le temps pris (stocké dans la variable durée) Serial.println(distance); if(distance>1 &&distance<15){ // Si vous placez vos mains à moins de 15 cm lcd.clear(); lcd.setCursor(1,0) ; lcd.print("Mains détectées"); lcd.setCursor(0,1) ; lcd.print("Se laver les mains - 20s"); digitalWrite (Relais, HAUT); // Active la pompe à eau submersible ou l'état de l'électrovanne d'eau =1 ; // Affecte la variable d'état à 1 délai (1000); // Un délai de 1 seconde doit être utilisé pour empêcher le clic du module relais lcd.clear(); lcd.print("Vous êtes en sécurité maintenant"); }autre{ digitalWrite(Relay, LOW); //Éteint la pompe à eau submersible ou l'électrovanne d'eau } if((state==1)&&(value==LOW)){ // Si vous placez vos mains devant le capteur IR après vous être lavé les mains lcd.clear (); lcd.setCursor(1,0) ; lcd.print("Vous pouvez entrer"); lcd.setCursor(1,1) ; lcd.print("10 secondes restantes"); servo.write(90); retard (10000); // La porte sera ouverte pendant 10 secondes servo.write(0); lcd.clear(); lcd.print("Lavez-vous les mains"); lcd.setCursor(0,1) ; lcd.print("avant d'entrer"); état=0 ; } else if((state==0)&&(value==LOW)){ // Si vous ne vous lavez pas les mains avant d'entrer lcd.clear(); lcd.print("Lavez-vous les mains"); lcd.setCursor(0,1) ; lcd.print("pour accorder l'accès"); } }
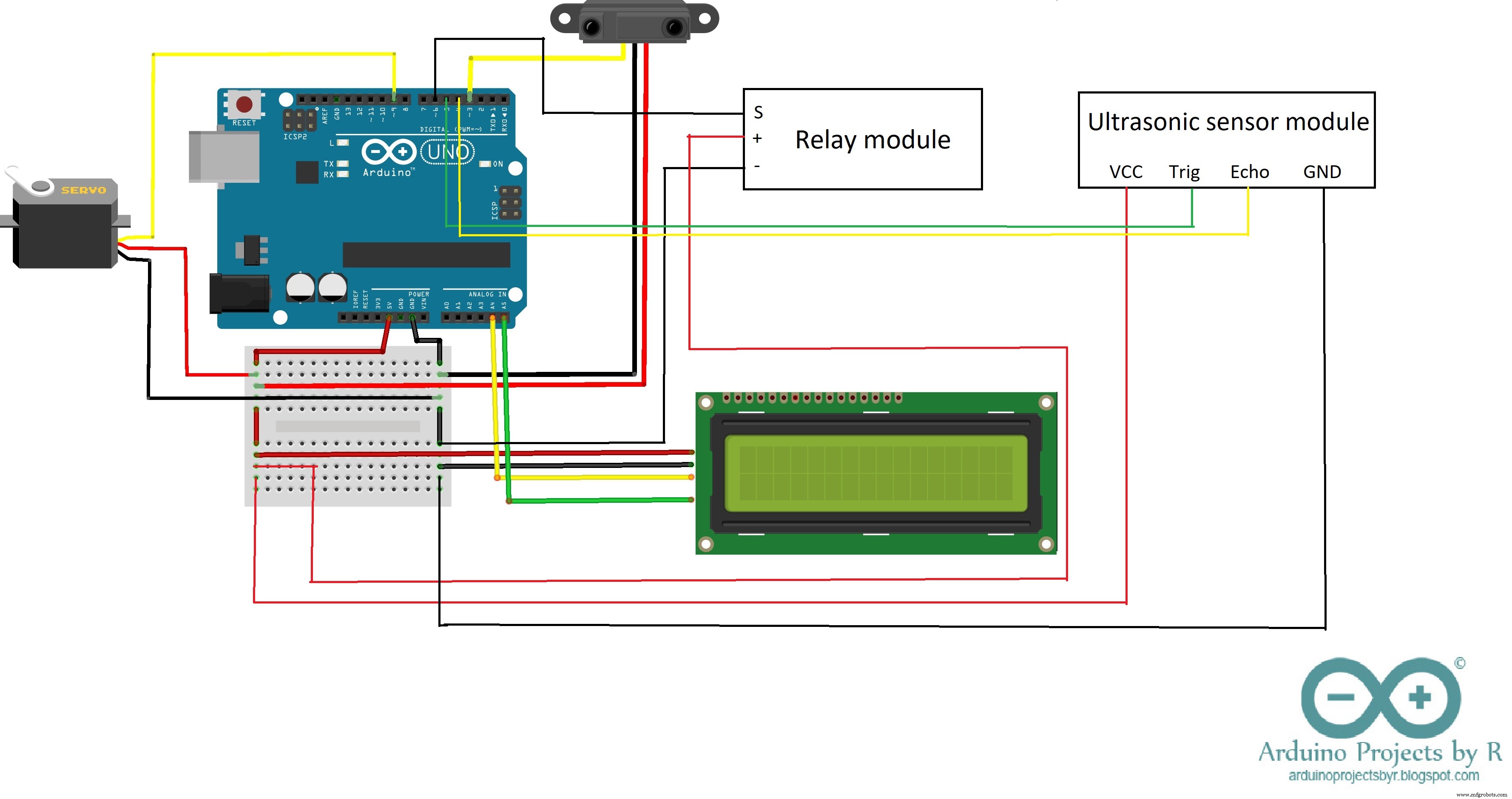
Schémas