


Earth_Analyzer
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 |
Outils et machines nécessaires
 |
| |||
 |
| |||
 |
| |||
 |
|
Applications et services en ligne
 |
| |||
 |
| |||
| ||||
 |
| |||
| ||||
 |
| |||
 |
|
À propos de ce projet
BONJOUR, BONJOUR TOUS
Ce projet concerne principalement le rover pour la terre qui peut aider les agriculteurs. Ce projet contient principalement trois modules.
MODULE 1 :
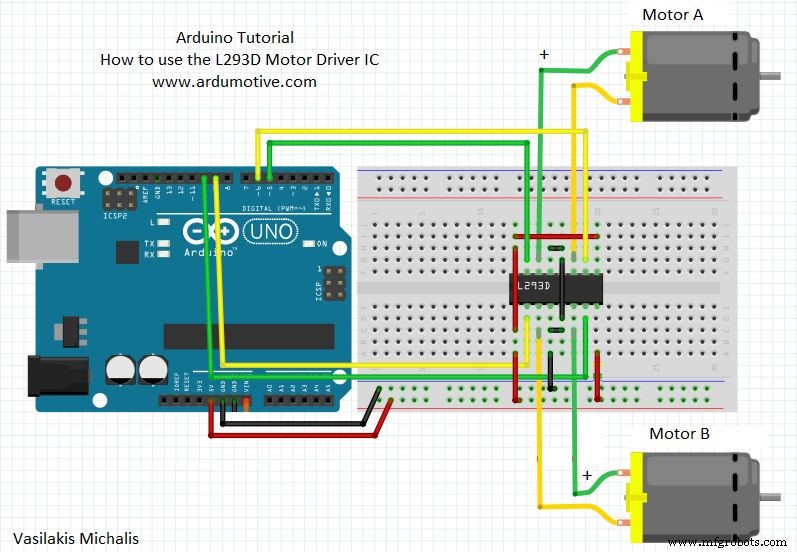
Les connexions matérielles pour la configuration complète considèrent maintenant les moteurs à courant continu.
Cela nécessite les deux moteurs à courant continu et un pilote de moteur. le pilote de moteur contient
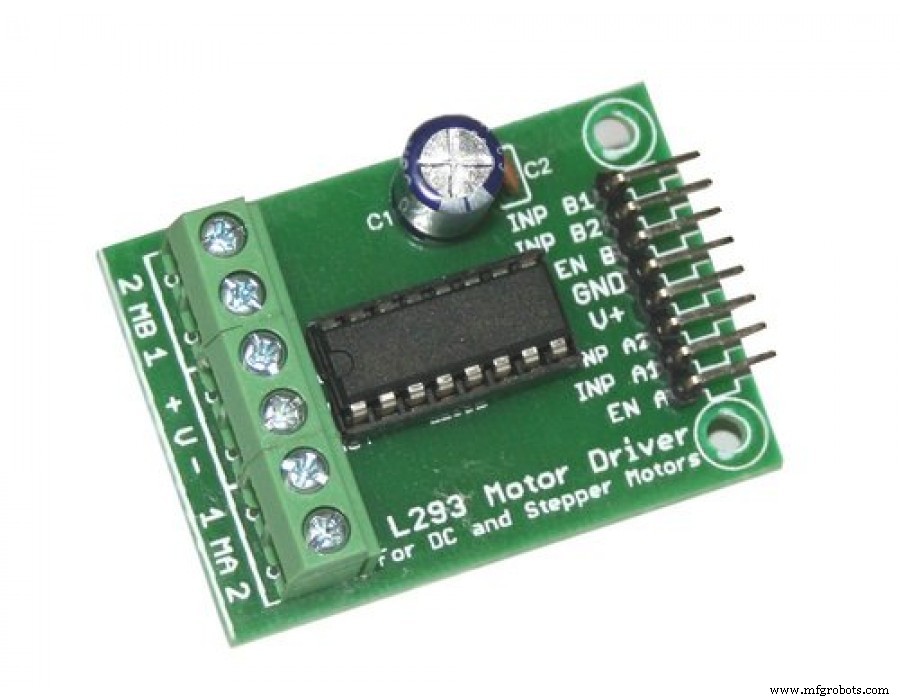
Ici, vous devez connecter le v +, en1, en2, au point unique de la planche à pain et du moteur quatre fils aux quatre entrées dans les broches 1 ma 2. Maintenant, les broches de sortie de la broche du pilote du moteur sont connectées à l'arduino et la batterie doit être connectée comme suit le schéma.
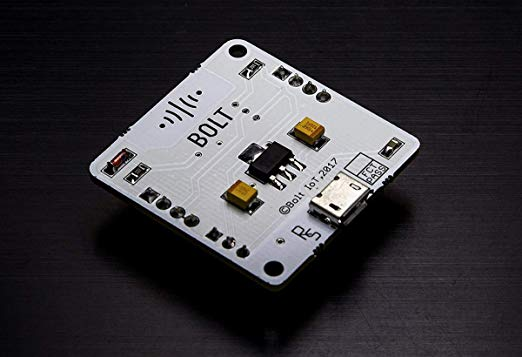
Maintenant, nous devons les connecter au boulon. Les mêmes quatre broches doivent être connectées aux broches numériques du boulon (0, 1, 2, 3).
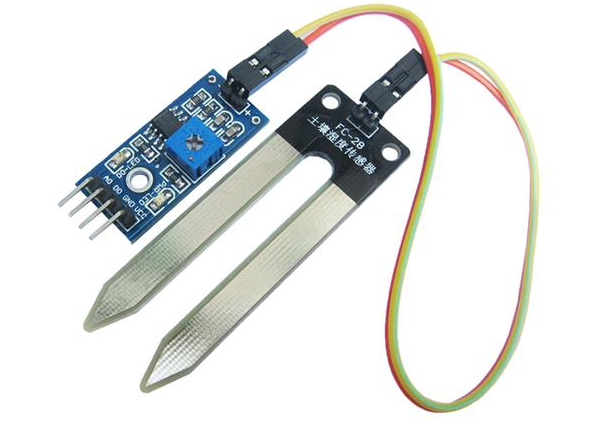
maintenant, le capteur de sol doit être connecté au boulon mais en plaçant la broche numérique sur le boulon (numérique 4 broches). Il est enfin temps de connecter le capteur de température à la broche analogique du boulon (A0).
Maintenant, cette fois, toute la masse et le v+ (capteur de température, capteur d'humidité), en1, en2 au 5v de l'arduino et enfin cette broche doit être fournie avec les batteries de tension requises.
MODULE 2 :
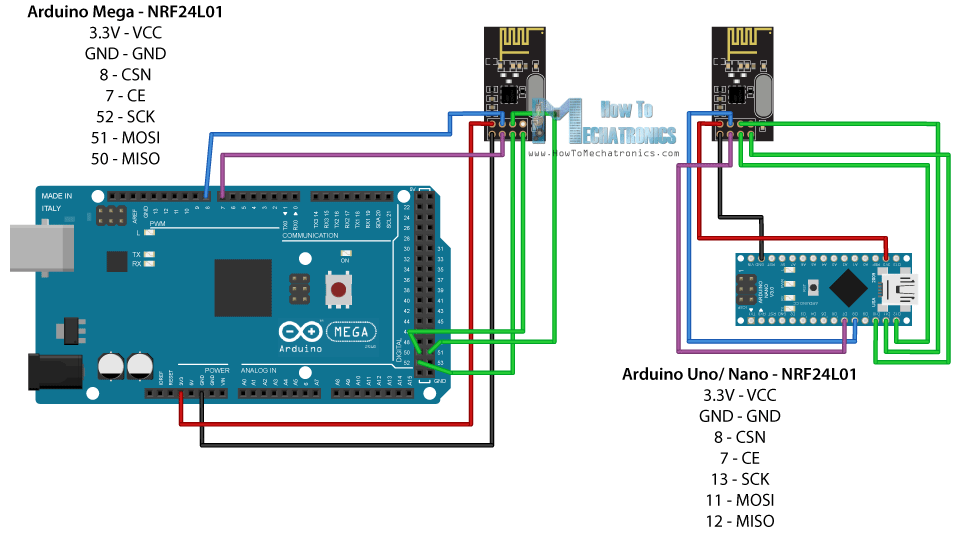
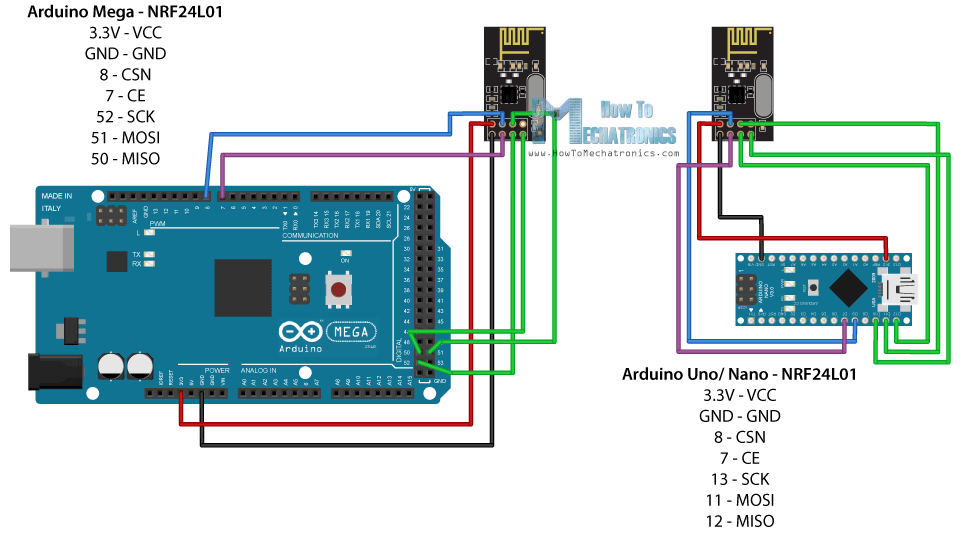
CONNEXIONS NRF :

Le schéma ci-dessus est appelé module nrf utilisé pour la communication radio. Le schéma ci-dessus doit également être inclus dans notre circuit pour contrôler la voiture dans les zones proches.

CONNEXION FINALE DE LA NRF AVEC L'ARDUINO
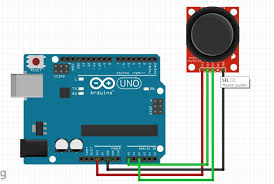
MAINTENANT SON TEMPS DE CONNECTER LES JOY STICKS :
Deux joysticks sont utilisés :
1) pour contrôler la direction de la voiture.
2) pour contrôler le servo.
MODULE 3 :
CODAGE FINAL
1) CODAGE ARDUINO :
émetteur :
#include
#include
#include
#include
#include
Radio RF24 (7, 8); // CSN, CE
const byte address[6] ="00001";
int x_key =A1;
int y_key =A0;
int p_key =A3;
int q_key =A2;
int x_pos;
int y_pos;
int p_pos;
int q_pos;
void setup() {
radio.begin();
radio.openWritingPipe(adresse)
;
radio.setPALevel(RF24_PA_MIN);
radio.setChannel(87);
radio.setDataRate(RF24_
250KBPS);
radio.stopListening();
Serial.begin(9600);
pinMode (x_key, INPUT) ;
pinMode (y_key, INPUT);
pinMode (p_key, INPUT);
pinMode (q_key, INPUT);
}
int pos;
void loop() {
x_pos =analogRead (x_key);
y_pos =analogRead (y_key);
p_pos =analogRead (p_key);
q_pos =analogRead (q_key);
Serial.println(x_pos);
Serial.println(y_pos);
Serial.println(p_pos);
Serial.println(q_pos);
if ( p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600)
{
if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600)
{
pos=100;
radio.write(&pos, sizeof(pos));
}
if(x_pos>400 &&x_pos<600 &&y_pos<400)
{
pos=200;
radio.write(&pos, sizeof(pos));
}
if(x_pos>400 &&x_pos<600 &&y_pos>600)
{
pos=300;
radio.write(&pos, sizeof(pos));
}
if(y_pos>400 &&y_pos<600 &&x_pos<400)
{
pos=400;
radio.write(&pos, sizeof(pos));
}
if(y_pos>400 &&y_pos<600 &&x_pos>600 )
{
pos=500;
radio.write(&pos, sizeof(pos));
}
Serial.println(pos);
delay(100);
}
else if(p_pos<400 || p_pos>600)
{
if(p_pos<400)
{
pos=600;
radio.write(&pos, sizeof(pos));
}
if(p_pos>600)
{
pos=700;
radio.write(&pos, sizeof(pos));
}
delay(100);
}
} destinataire :
#include
#include
#include
#include
#include
#include
Servo servo ;
Radio RF24 (7, 8); // CSN, CE
const byte address[6] ="00001";
int servo_pin =9;
int sensor_pin=A0;
int output_value;
void setup() {
Serial.begin(9600);
radio.begin();
servo.attach (servo_pin );
radio.openReadingPipe(0, adresse);
radio.setPALevel(RF24_PA_MIN);
radio.setChannel(87);
radio.setDataRate(RF24_250KBPS);
radio.startListening();
}
int pos;
boucle vide() {
if (radio.available()) {
radio.read(&pos, sizeof(pos));
Serial.println(pos);
if(pos==100)
{
digitalWrite(6,LOW);
digitalWrite(5,LOW);
digitalWrite (4,LOW);
digitalWrite(3,LOW);
// Serial.println("gk0");
}
else if (pos==200){
digitalWrite(6,HIGH);
digitalWrite(5,LOW);
digitalWrite(4,HIGH);
digitalWrite(3,LOW);
delay( 10);
// Serial.println("gk1");
}
else if (pos==300){
digitalWrite(6,LOW);
digitalWrite(5,HIGH );
digital Write(4,LOW);
digitalWrite(3,HIGH);
delay(10);
// Serial.println("gk2");
}
else if (pos==400){
digitalWrite(6,LOW);
digitalWrite(5,HIGH );
digitalWrite(4,HIGH);
digitalWrite(3 ,LOW);
delay(10);
// Serial.println("gk3");
}
else if (pos==500){
digitalWrite(6,HIGH);
digitalWrite(5,LOW );
digitalWrite(4,LOW);
digitalWrite(3,HIGH);
delay(10);
// Serial.println("gk5");
}
else if (pos==600){
servo.write(90);
delay(10 );
// Serial.println("gk6");
}
else if (pos==700){
servo.write(180);
delay( 10);
// Serial.println("gk7");
}
}
else
{
Serial.println( "connexion perdue");
}
}
} maintenant recevoir un message télégramme :(code serveur )
connectez-vous à l'un des serveurs comme ripl.it, puis téléchargez les codes
main.py
importer des requêtes # pour faire des requêtes HTTP
importer json # bibliothèque pour gérer les données JSON
import time # module pour sleep operation
from boltiot import Bolt # import Bolt from boltiot module
import conf # config file
mybolt =Bolt(conf.bolt_api_key, conf.device_id)
def get_sensor_value_from_pin(pin) :
try :
response =mybolt.digitalRead (pin)
data =json.loads(response)
if data["success"] !=1 :
print("Demande non réussie")
print("Ceci est la réponse->", data)
return -999
sensor_value =int(data["value"])
return sensor_value
sauf exception comme e :
print("Une erreur s'est produite lors du retour de la valeur du capteur")
print(e)
return -999
def send_telegram_message(message):
"""Envoie un message via Telegram" ""
url ="https://api.telegram.org/" + conf.telegram_bot_id + "/sendMessage"
data ={
"chat_id":conf.telegram_chat_id,
"texte":message
}
essayez :
re sponse = requests.request(
"GET",
url,
params=data
)
print("Ceci est la réponse du télégramme")
print(response.text)
telegram_data =json.loads(response.text)
return telegram_data["ok"]
sauf exception comme e :
print("Une erreur s'est produite en envoyant le message d'alerte via Telegram")
print(e)
retourner False
tandis que True :
# Étape 1
sensor_value =get_sensor_value_from_pin("4")
print("La valeur actuelle du capteur est :", sensor_value)
# Étape 2
if sensor_value ==-999 :
print("La demande a échoué. Sauter.")
time.sleep(10)
continue
# Étape 3
if sensor_value>=conf.threshold :
print("La valeur de température actuelle est ")
message ="La valeur d'humidité est juste supérieure au seuil "
telegram_status =send_telegram_message(message)
print("Ceci est l'état du télégramme :", telegram_status)
# Étape 4
time.sleep(100) conf.py :
"""Configurations for telegram_alert.py"""
bolt_api_key ="XXXX" # Ceci est votre clé API Bolt Cloud
device_id ="XXXX" # Ceci est l'ID de l'appareil et sera similaire à BOLTXXXX où XXXX correspond à des nombres
telegram_chat_id ="@XXXX" # Il s'agit de l'ID de canal du canal Telegram créé. Coller après @
telegram_bot_id ="botXXXX" # Il s'agit de l'ID de bot du Telegram Bot créé. Coller après le bot
seuil =0 # Seuil au-delà duquel l'alerte doit être envoyée entrez vos valeurs de bot et d'api
PROCESSUS :
Messagerie d'alerte à l'aide de Telegram
Qu'est-ce que Telegram ?
Telegram est une application de messagerie similaire à Whatsapp. Vous pouvez également envoyer et recevoir des messages avec des fichiers. C'est gratuit à utiliser. Vous pouvez accéder à la plateforme via votre téléphone Android/iOS/Windows ainsi que votre PC ou Mac.

Quelques terminologies de télégrammes -
Qu'est-ce qu'une chaîne Telegram ?
Un canal est à Telegram ce que les groupes sont à Whatsapp. Les chaînes sont un outil pour diffuser vos messages à un large public. Ils peuvent avoir un nombre illimité d'abonnés, ils peuvent être publics avec une URL permanente et chaque publication d'une chaîne a son propre compteur de vues.
Qu'est-ce qu'un Bot ?
Les bots sont des applications tierces qui s'exécutent dans Telegram. Les utilisateurs peuvent interagir avec les robots en leur envoyant des messages, des commandes et des requêtes.
Nous utiliserons des Bots pour envoyer des alertes sur notre chaîne.
Qu'allons-nous apprendre dans ce projet ?
Dans ce projet, vous pourrez envoyer des alertes via Telegram à votre téléphone lorsque la valeur du capteur dépasse le seuil défini.
De quoi ai-je besoin pour ce projet ?
Pour envoyer des alertes et des messages via Telegram, vous aurez besoin,
- Un téléphone Android/iOS/Windows avec connectivité Internet.
- Un compte Telegram. Vous aurez besoin d'un numéro de portable pour cela.
- Accès à votre système d'exploitation Ubuntu via puTTY ou une machine virtuelle.
Configurer le télégramme
Étapes pour s'inscrire/se connecter à Telegram
- Accédez au Playstore ou à l'App Store sur votre téléphone et recherchez Telegram.
- Téléchargez et installez la dernière version de l'application Telegram.
- Inscrivez-vous pour un nouveau compte ou connectez-vous à Telegram en fournissant votre numéro de mobile.
- Telegram vous appellera OU vous enverra un SMS pour vérifier votre numéro de mobile.
- Faites vérifier votre compte et approuvez toutes les autorisations si nécessaire.
- Vous serez connecté à Telegram et un écran similaire à celui ci-dessous s'affichera. (Ce n'est pas grave si cela diffère de la capture d'écran ci-dessous)
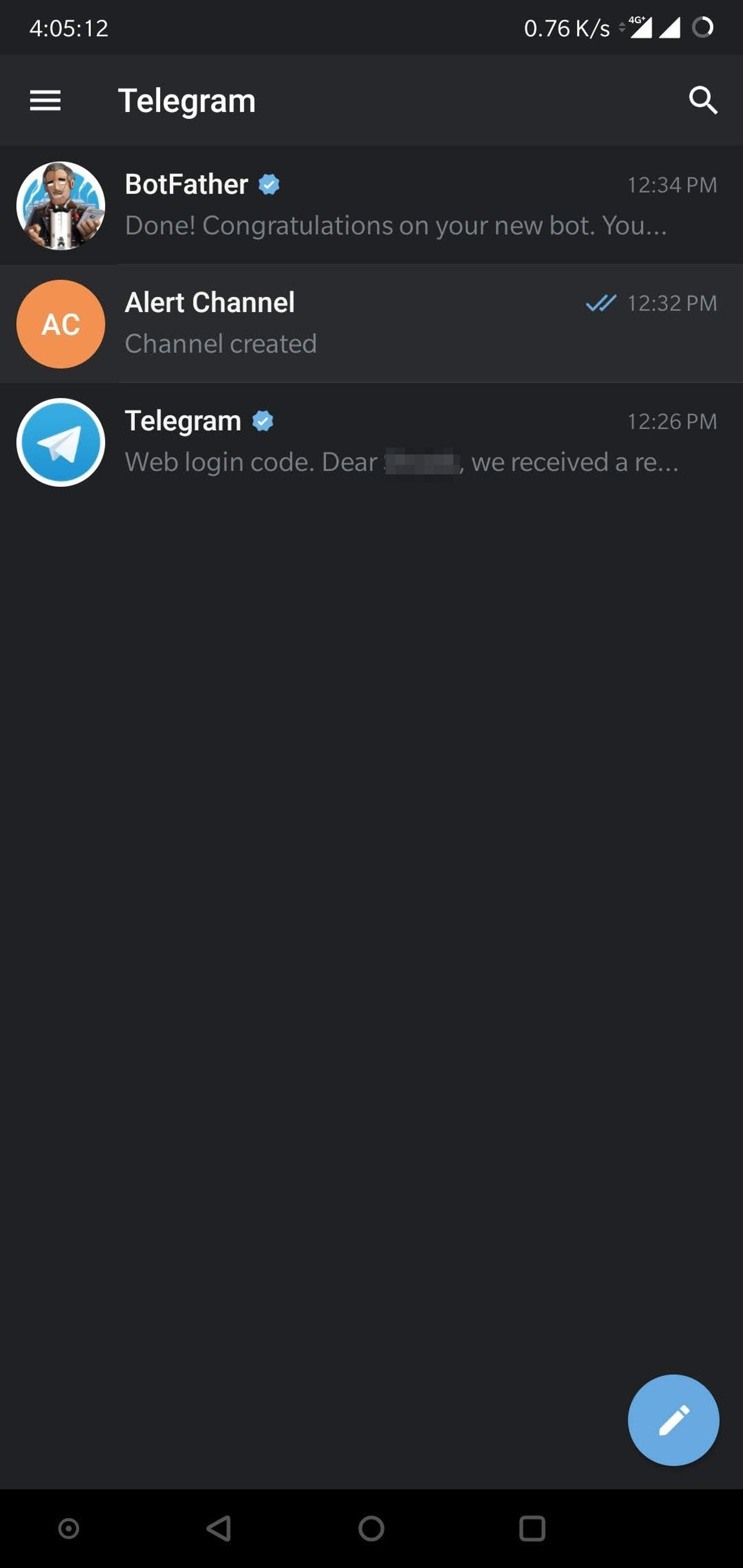
Vous avez correctement installé Telegram et configuré votre compte. Dans les prochaines leçons, nous en apprendrons davantage sur les chaînes et les bots.
Création d'une chaîne
Qu'est-ce qu'une chaîne Telegram ?
Un canal est à Telegram ce que les groupes sont à Whatsapp. Les chaînes sont un outil pour diffuser vos messages à un large public. Ils peuvent avoir un nombre illimité d'abonnés, ils peuvent être publics avec une URL permanente et chaque publication d'une chaîne a son propre compteur de vues.
Étapes pour créer une chaîne
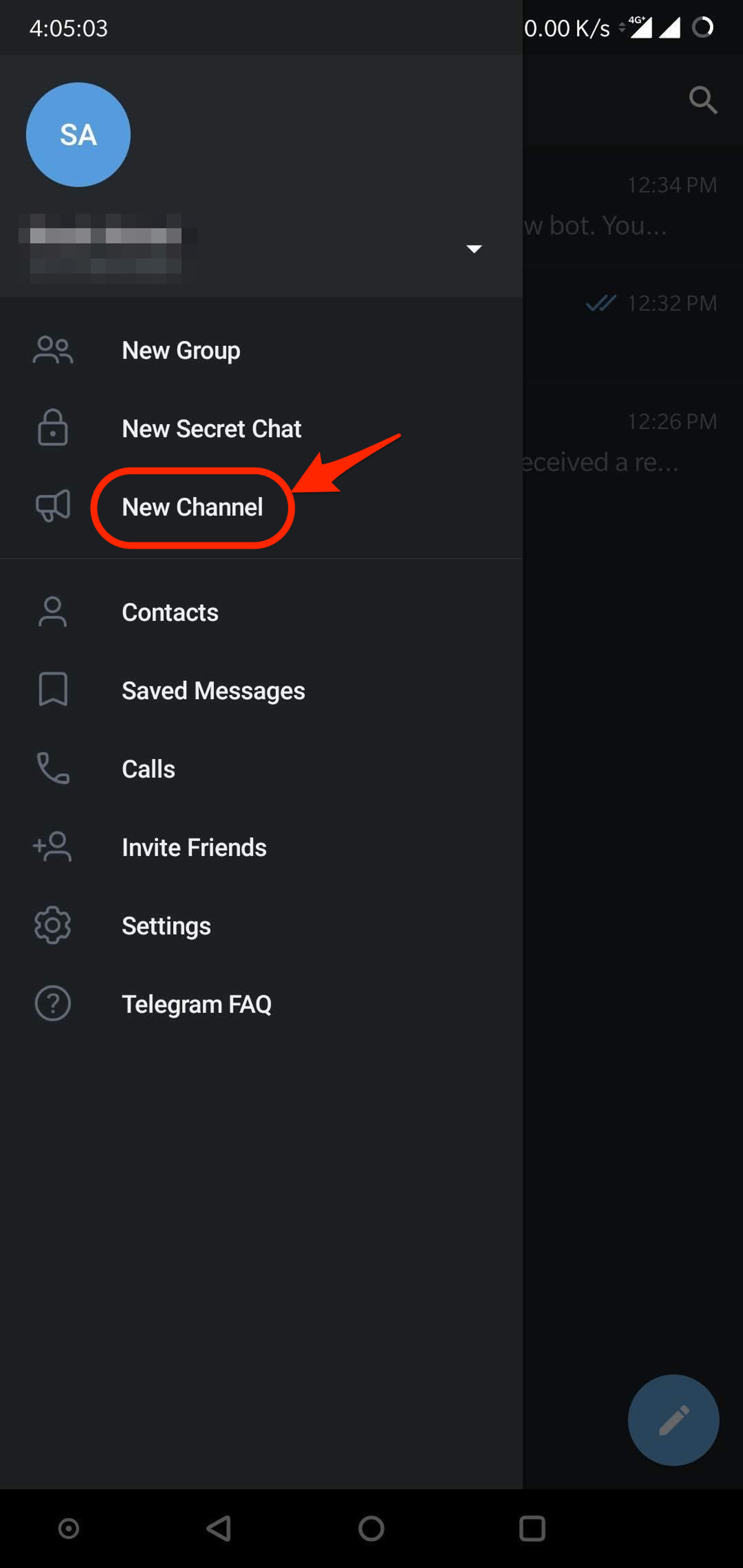
- Accédez à l'écran d'accueil de l'application Telegram.
- Balayez depuis la gauche pour afficher le menu.
- Cliquez sur "Nouvelle chaîne".
- Il vous demandera un nom et une description pour votre chaîne. Donnez un nom et une description appropriés. L'ajout d'une photo est facultatif.
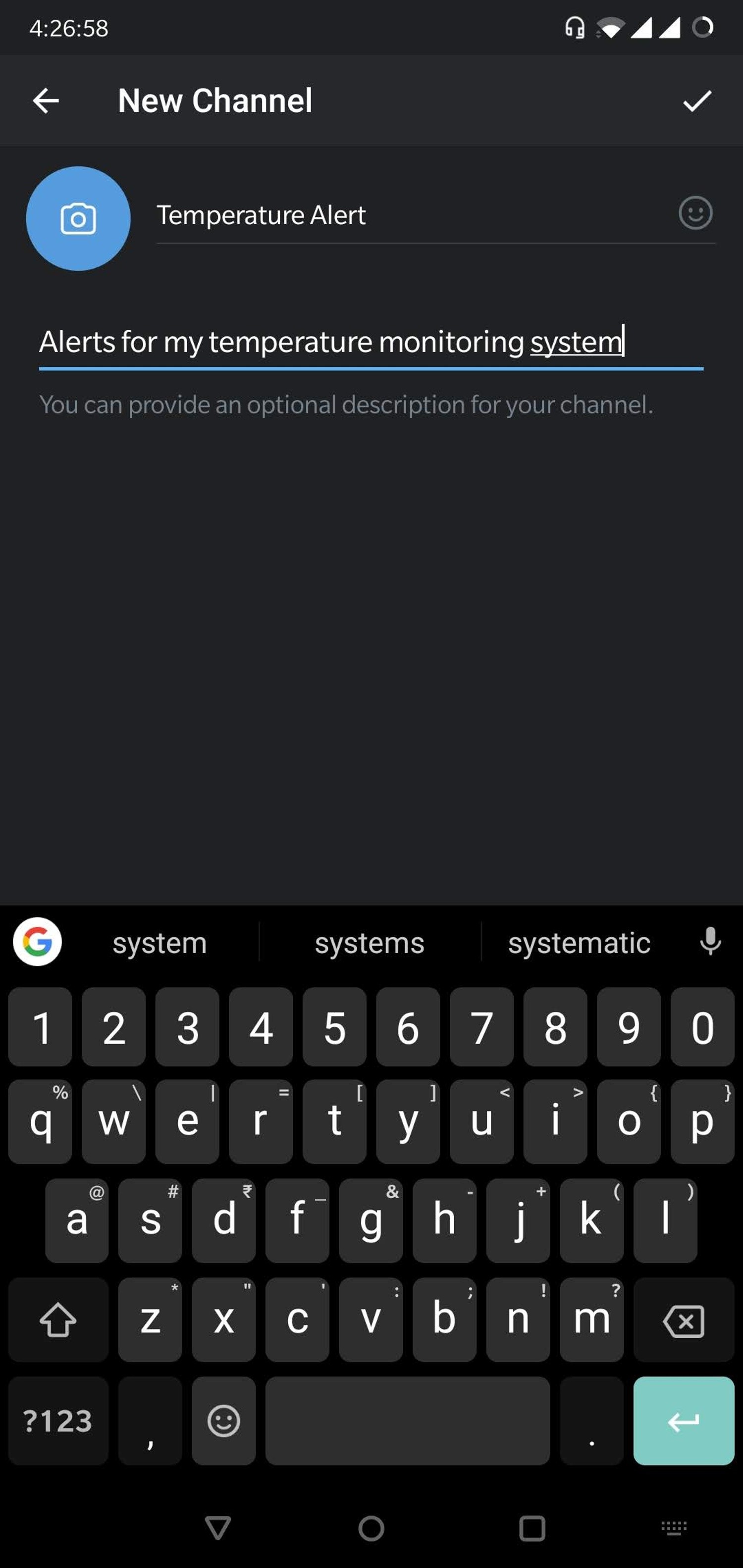
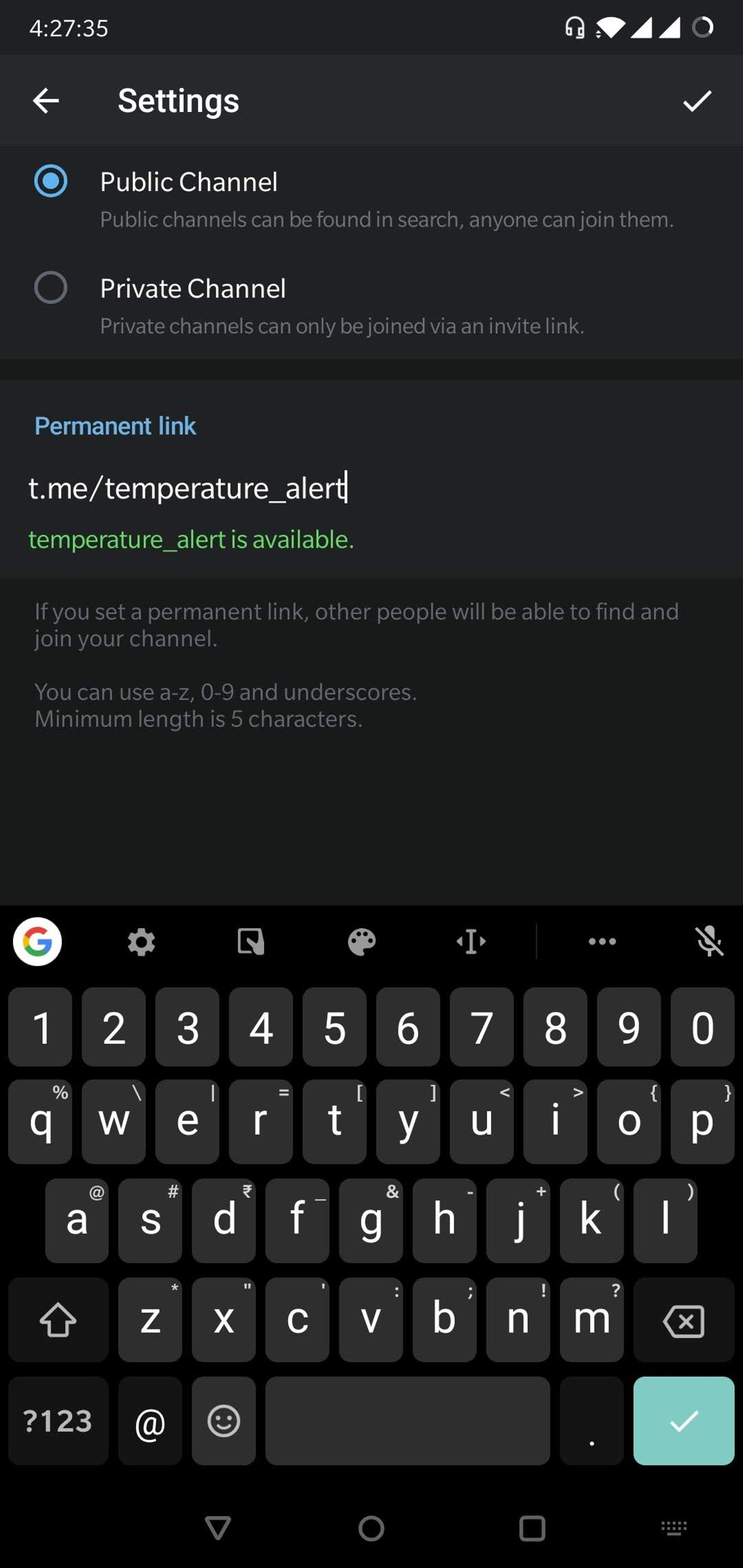
- Dans l'écran suivant, définissez la chaîne comme publique.
- Sur le même écran, il vous sera demandé d'entrer un lien permanent pour votre chaîne. Vous pouvez utiliser des lettres minuscules et des chiffres de 0 à 9 pour créer le lien de chaîne.
- Veuillez noter que le nom du lien de chaîne est global et que vous ne pourrez créer un lien de chaîne que si le nom du lien est disponible. Le nom du lien de chaîne ressemble à une adresse e-mail, c'est-à-dire qu'un seul identifiant de messagerie unique peut exister à la fois.
- Vous pouvez conserver le nom du lien de la chaîne comme temperature_alert_ suivi de votre identifiant de messagerie. Exemple, si mon identifiant e-mail est developer@boltiot.com, je peux conserver le nom du lien du canal en tant que temperature_alert_developer_boltiot_com (J'ai supprimé le symbole @ et. car ce n'était pas autorisé et je l'ai remplacé par un trait de soulignement _). Ce n'est qu'une suggestion. Vous pouvez conserver le nom du lien de chaîne comme vous le souhaitez tant qu'il est valide.
- Gardez une note du nom du lien permanent de cette chaîne. Il sera nécessaire plus tard d'envoyer des messages à ce canal. Par exemple, le nom du lien de la chaîne dans la capture d'écran ci-dessous est " temperature_alert".
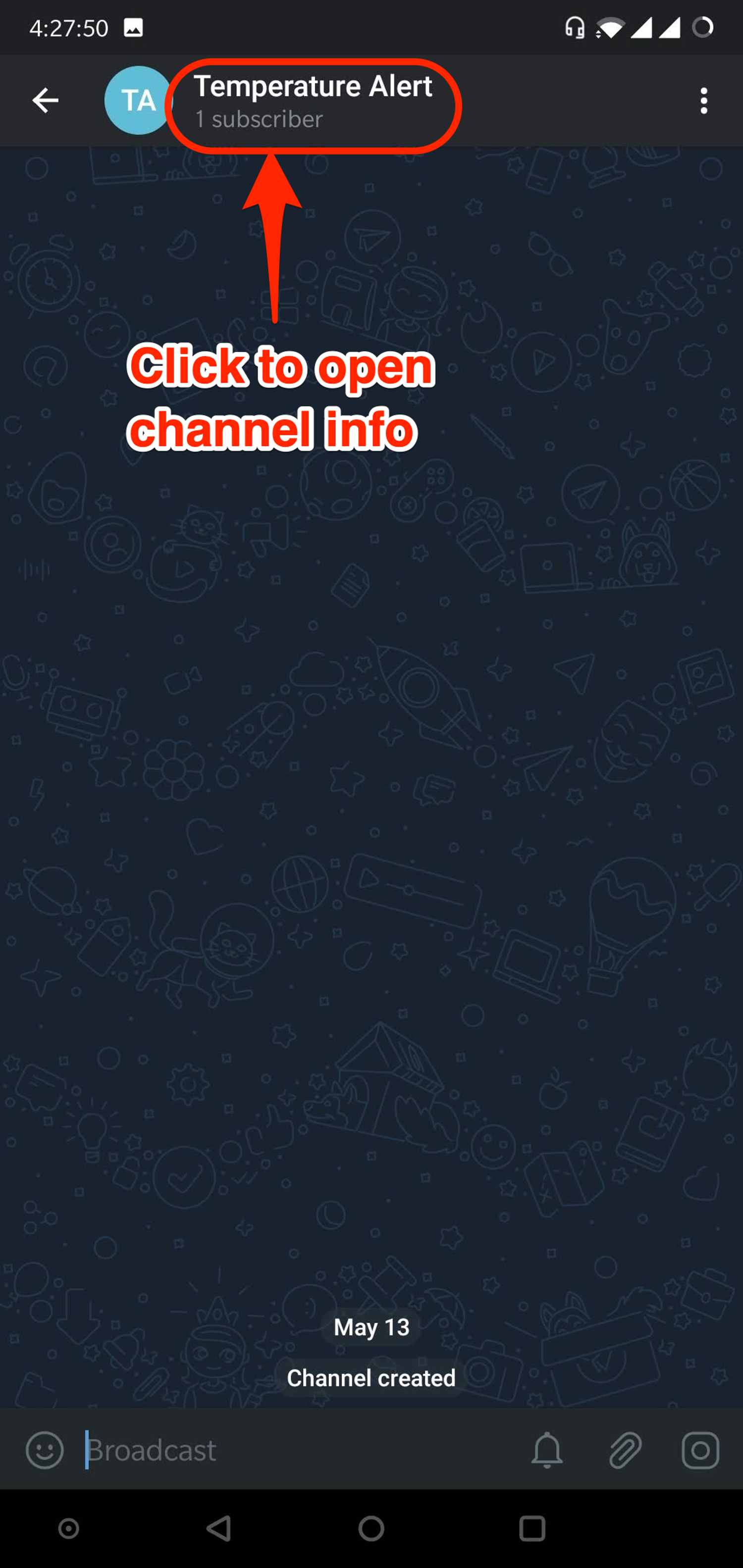
- Félicitations ! Vous avez créé une nouvelle chaîne. Vous pouvez également afficher cette chaîne à partir de l'écran d'accueil de votre application.

- Vous pouvez cliquer sur le nom de la chaîne en haut pour afficher plus de détails à ce sujet.
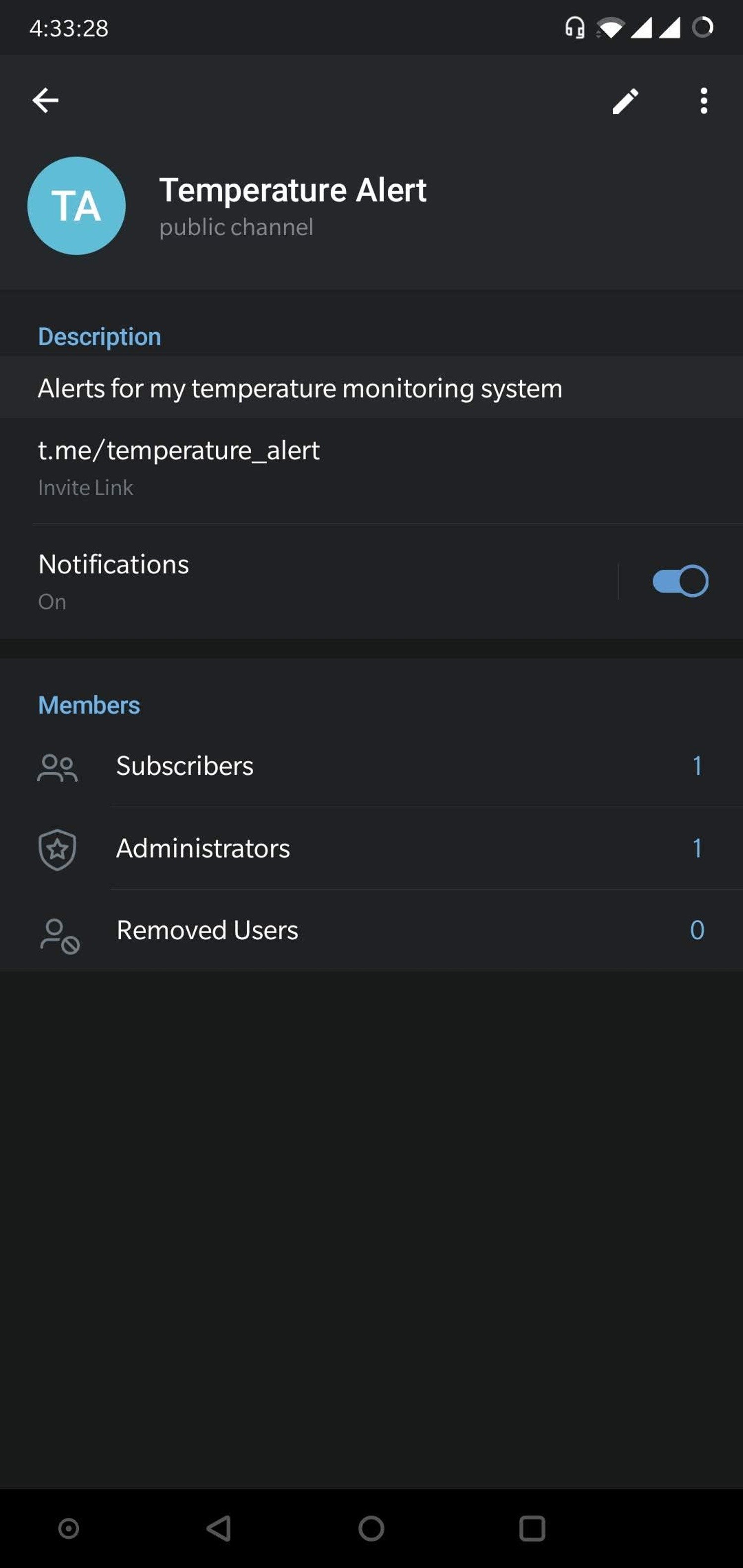
- Ensuite, nous devrons créer et ajouter un Bot au canal afin qu'il puisse publier des alertes pour nous dans ce canal.
Créer un Bot
Qu'est-ce qu'un Bot ?
Les bots sont des applications tierces qui s'exécutent dans Telegram. Les utilisateurs peuvent interagir avec les robots en leur envoyant des messages, des commandes et des requêtes.
Nous utiliserons des Bots pour envoyer des alertes sur notre chaîne.
Créer un nouveau Bot
Telegram nous permet de créer un nouveau bot à l'aide d'un bot appelé « BotFather ». C'est un bot unique pour créer et gérer d'autres bots.
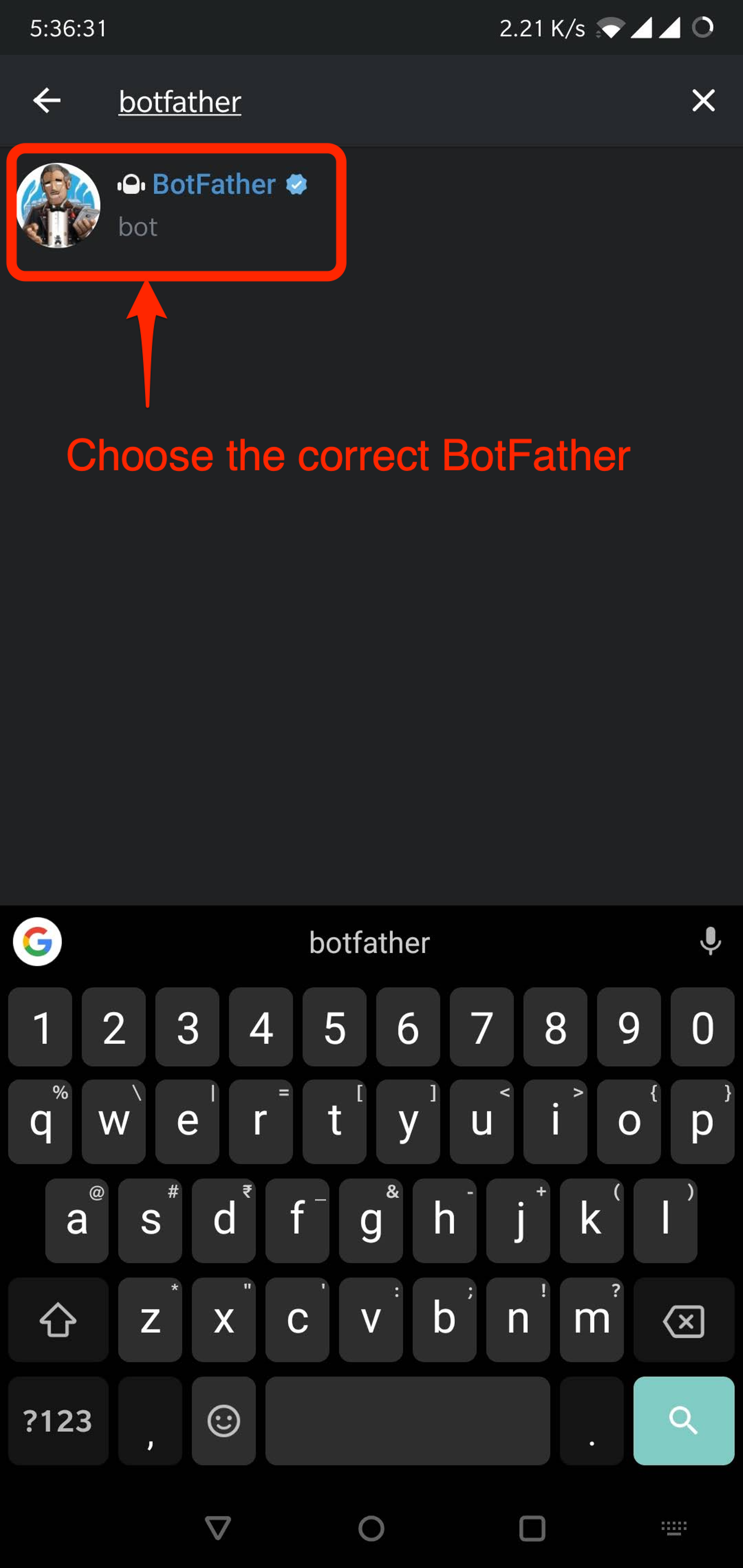
- Sur l'écran d'accueil de l'application, cliquez sur l'icône de recherche en haut à droite et saisissez "botfather".
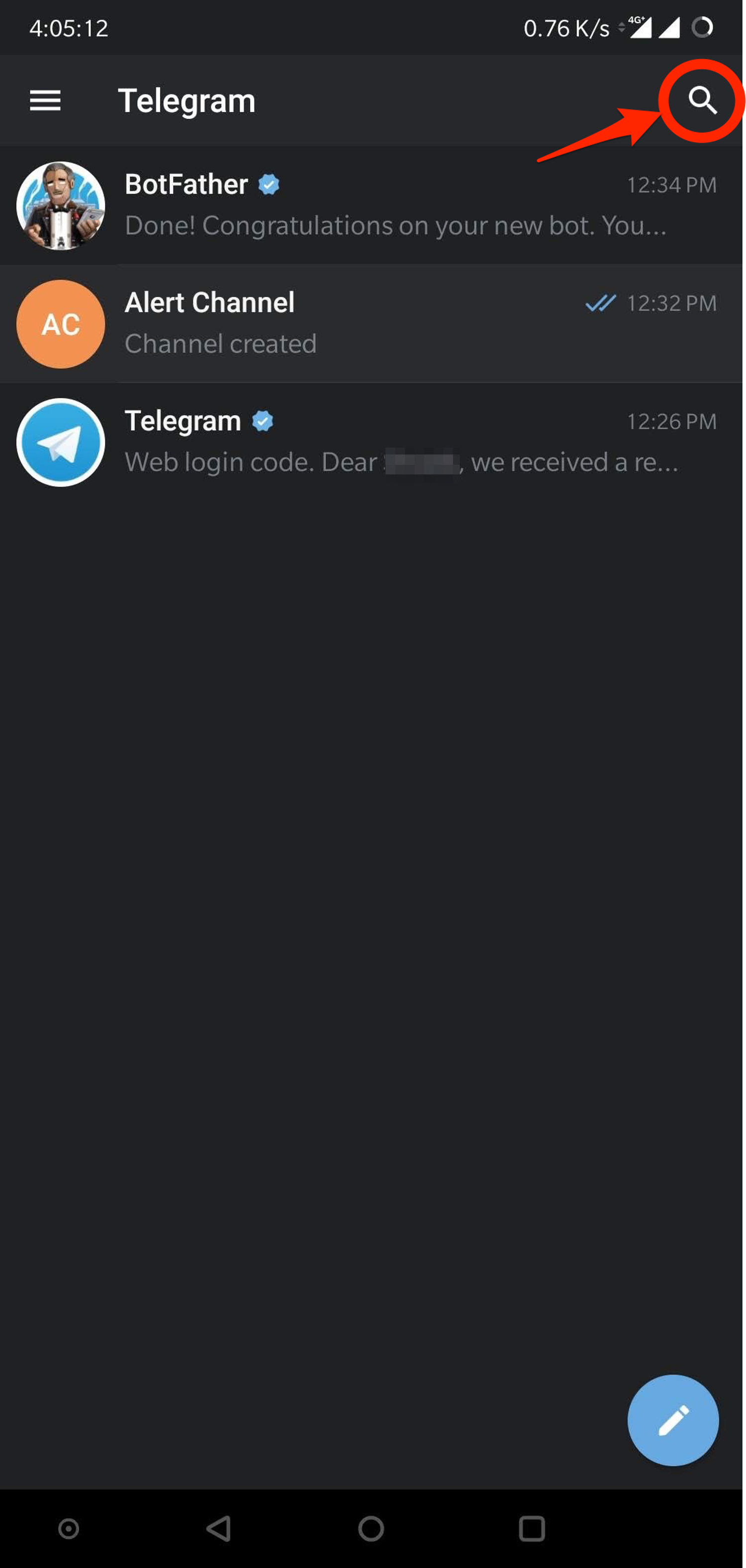
- Dans les résultats de la recherche, cliquez sur le résultat correct pour "BotFather" comme indiqué ci-dessous. Le "BotFather" correct aura une coche bleue à côté de son nom. Cela vous amènera à une fenêtre de discussion avec le "BotFather".
- Le chat contiendra déjà quelques éléments et vous affichera une liste de commandes pour commencer.
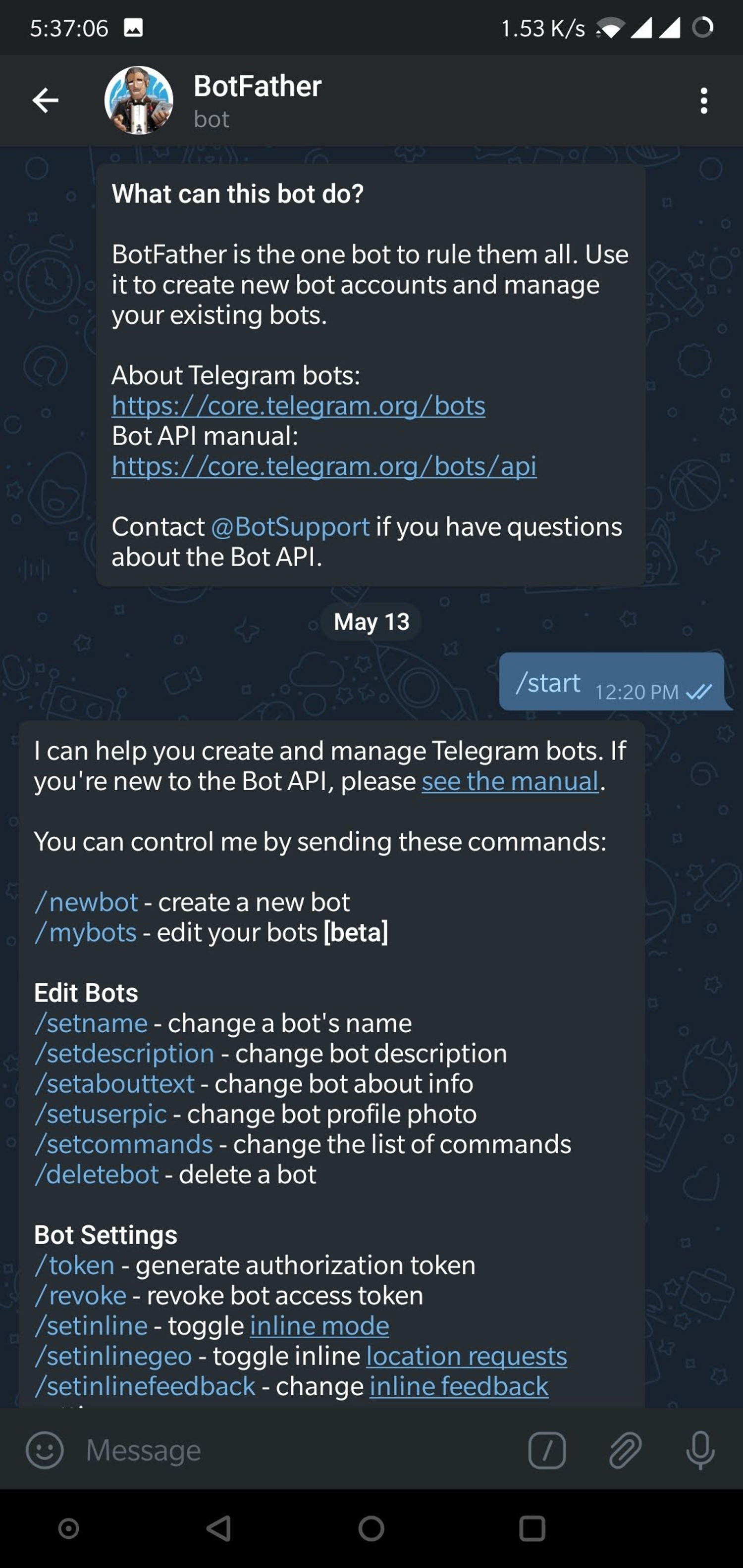
- Comme nous devons créer un nouveau Bot, allez-y et saisissez "/newbot" dans la fenêtre.
- Il vous sera demandé de saisir quelques détails supplémentaires comme le nom du Bot et le nom d'utilisateur du Bot.
- Lorsque votre bot est créé avec succès, un écran similaire à celui ci-dessous s'affichera et contiendra le jeton de bot. Ce jeton est utilisé pour contrôler votre Bot ainsi que pour envoyer des messages en son nom. Veuillez garder ce jeton en sécurité car il permettra à n'importe qui d'accéder à votre Bot.
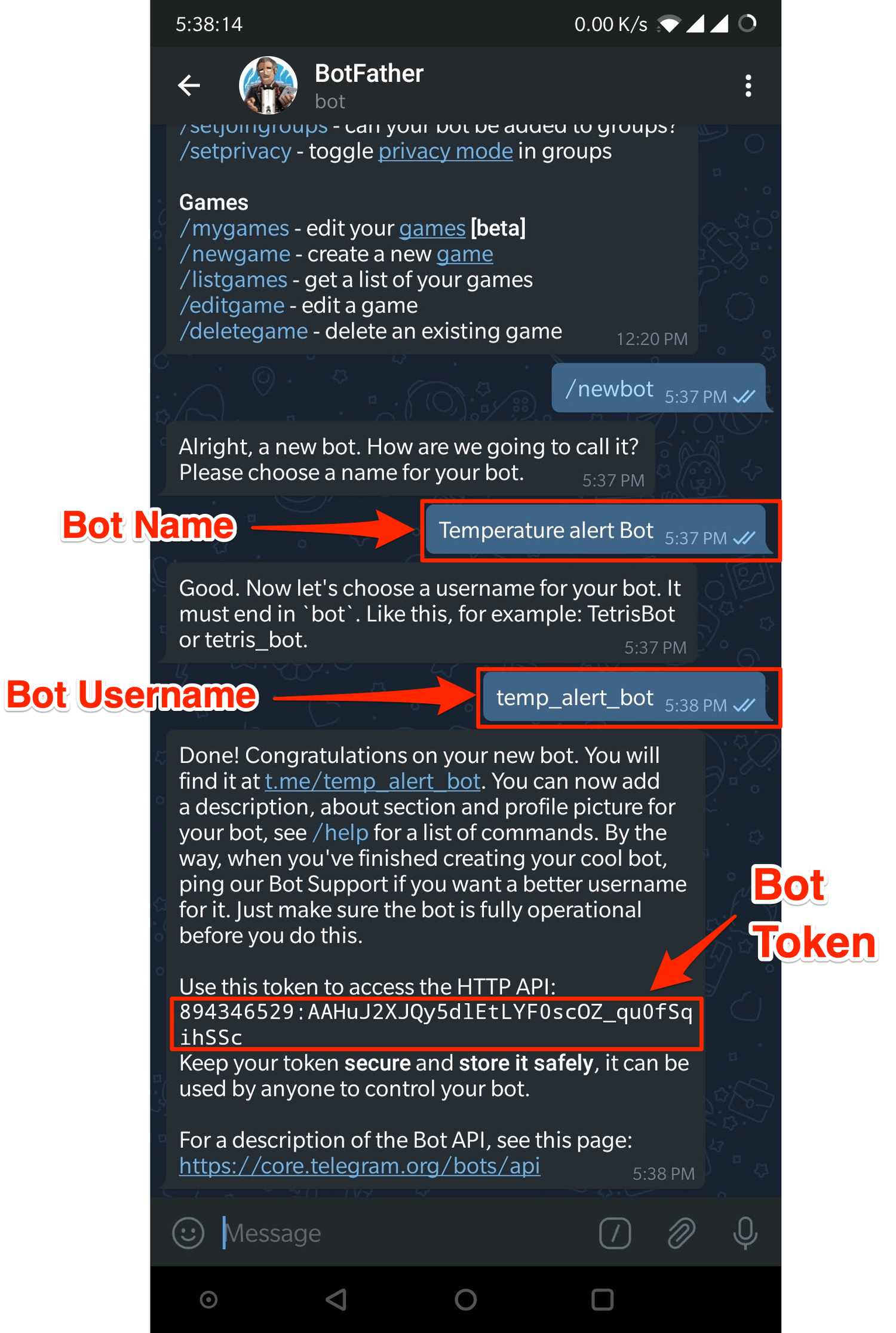
- Dans la capture d'écran ci-dessus, le jeton Bot est "894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc". Veuillez l'enregistrer sous le nom telegram_bot_id. Le telegram_bot_id est enregistré en tant que "bot" suivi du jeton de bot. Ainsi, dans cet exemple, le telegram_bot_id sera "bot894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc".
- Le telegram_bot_id sera utilisé dans le code python pour envoyer des messages. Le code python sera enseigné dans les leçons suivantes.
- En outre, soyez prudent lorsque vous enregistrez l'ID de robot. Vous pouvez être confus entre 0 et O, I et 1 etc. car ils se ressemblent.
- Félicitations, vous avez créé un nouveau Bot. Maintenant, nous devrons l'ajouter au canal que nous avons créé précédemment afin que nous puissions envoyer des alertes.
Ajouter le bot au canal
- À partir de l'écran d'accueil de l'application, ouvrez la chaîne que nous avons créée précédemment.
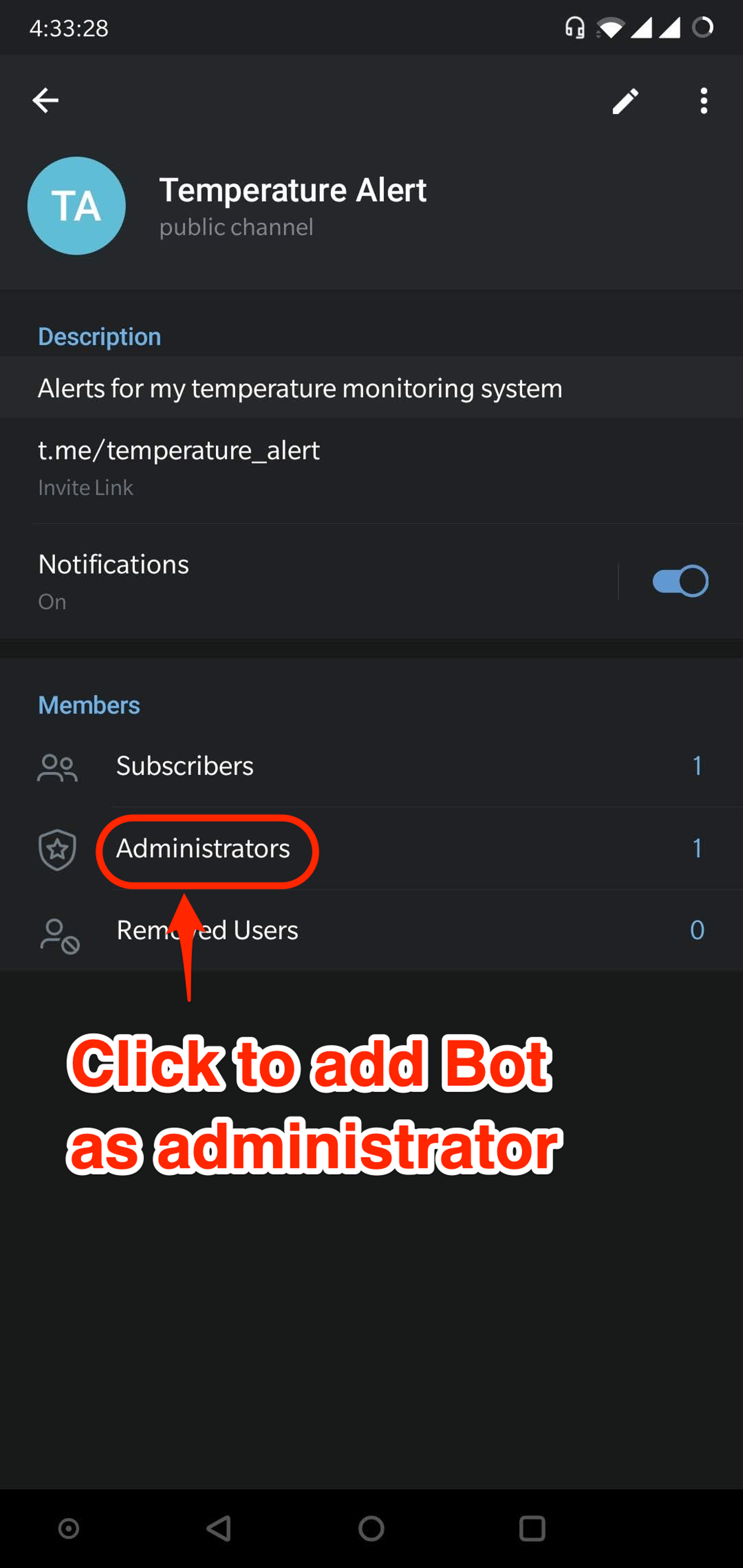
- Dans l'écran, cliquez sur le nom de la chaîne en haut pour ouvrir les informations de la chaîne.
- Cliquez sur le bouton Administrateurs pour que nous puissions ajouter le bot nouvellement créé à la chaîne.
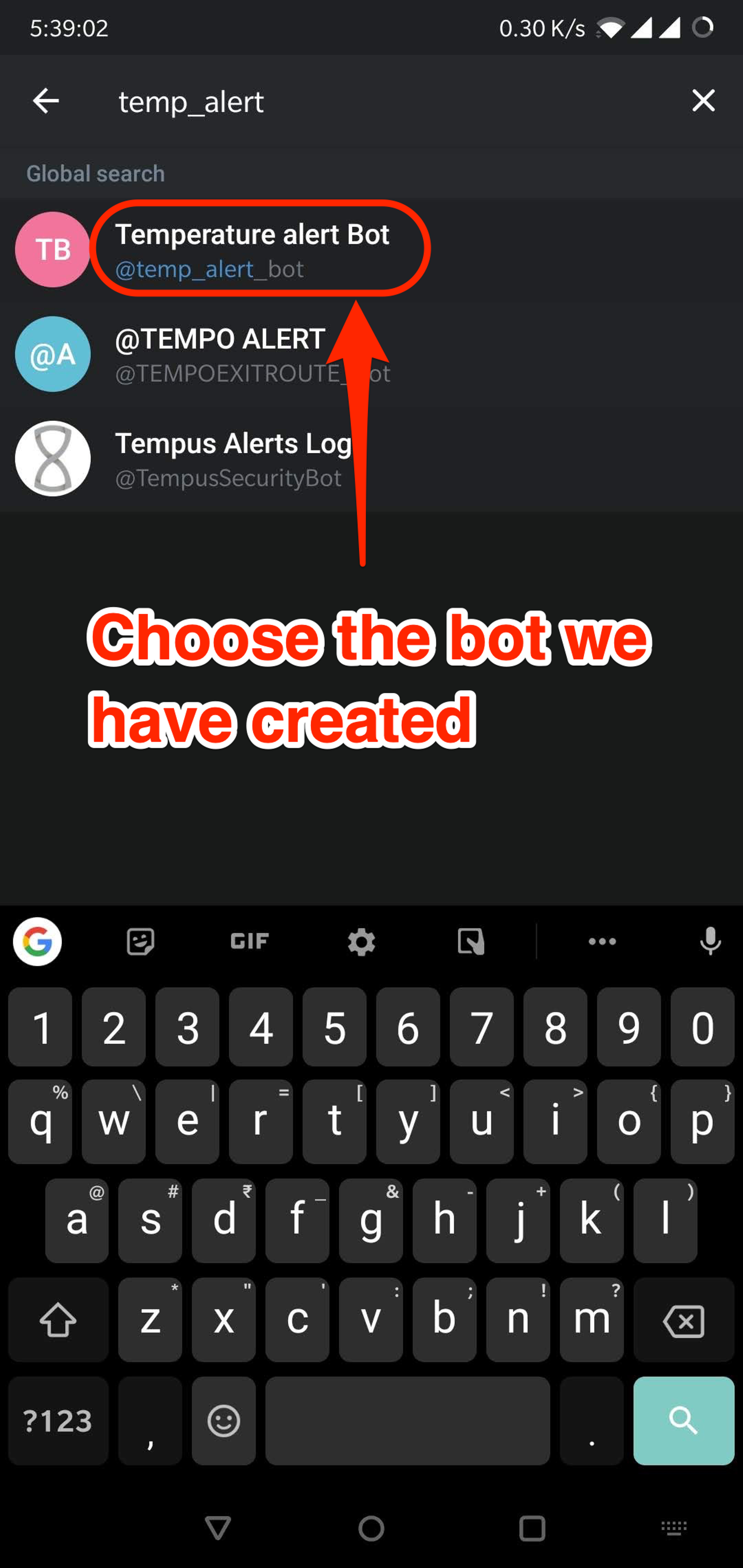
- Recherchez le bot que nous avons créé à l'aide du nom d'utilisateur du bot. Une fois que vous avez trouvé le bon Bot, cliquez dessus pour l'ajouter au canal. Veuillez vous assurer que vous avez cliqué sur le bouton Administrateurs à l'étape précédente car cela permettra à notre bot de publier sur le canal.
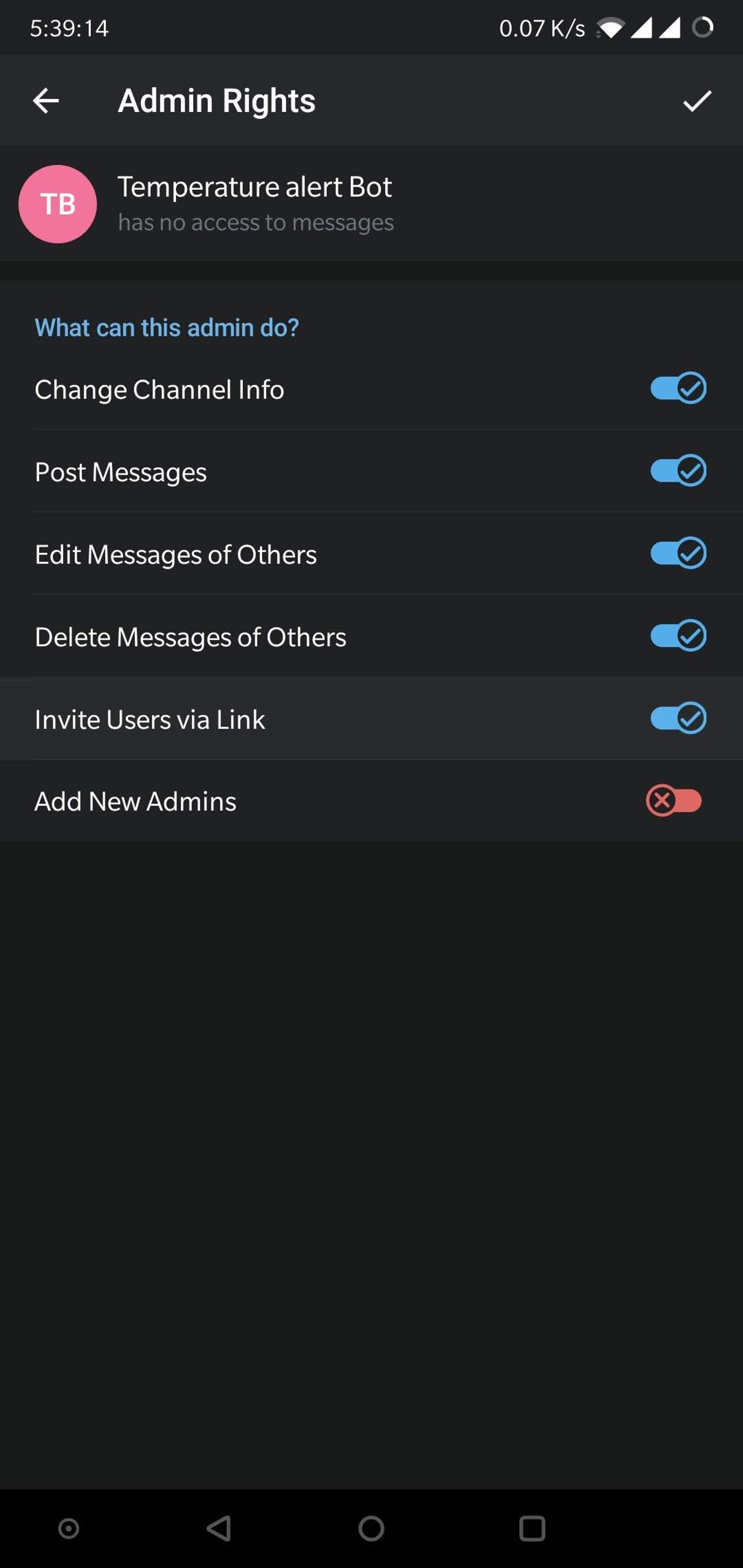
- Il vous sera demandé de confirmer les droits du bot. Appuyez sur la coche en haut à droite pour continuer à ajouter le bot au canal. Assurez-vous que le bot a les droits de "Publier des messages".
- Vous verrez maintenant le Bot nouvellement créé dans la liste des administrateurs de la chaîne.
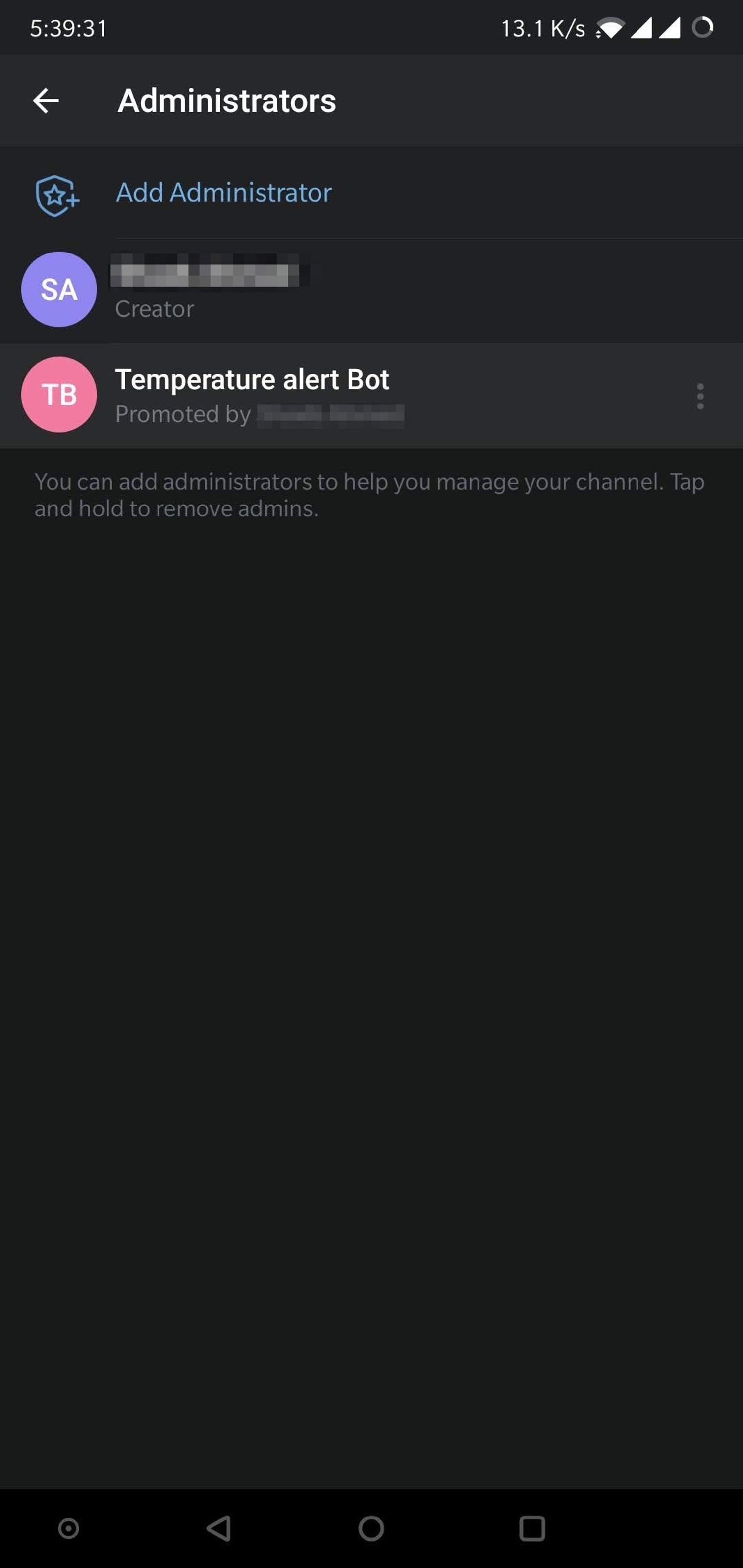
- Maintenant, nous allons coder pour envoyer des messages au canal via le Bot.
MAINTENANT CONFIGURATION DU RÉSEAU POUR TWILLO ET MAIL GUN
Recevez les valeurs du capteur de température LM35 par SMS et par e-mail à tout moment sur votre téléphone portable à l'aide de l'Assistant Google.

Que faites-vous lorsque vous devez vérifier les valeurs des capteurs de votre projet Iot à tout moment ? Vous venez de vous connecter à votre cloud pour le vérifier. Cela semble simple, non? Mais que se passerait-il si vous deviez vérifier les valeurs une fois toutes les heures ou une fois toutes les quelques minutes et cela plusieurs fois par jour. Ce serait un peu (très) encombrant, non ? Maintenant, imaginez un monde où vous pourriez obtenir les valeurs du capteur par SMS et e-mail en disant simplement « Envoyez-moi les valeurs du capteur » à votre assistant Google. Attends attends. Cette situation n'est plus imaginaire parce que vous-mêmes pourriez le faire en quelques étapes. Lisez la suite pour le découvrir.
Dans ce projet, nous recevrons les valeurs du capteur de température du capteur LM35 via SMS et e-mail via une commande à Google Assistant.
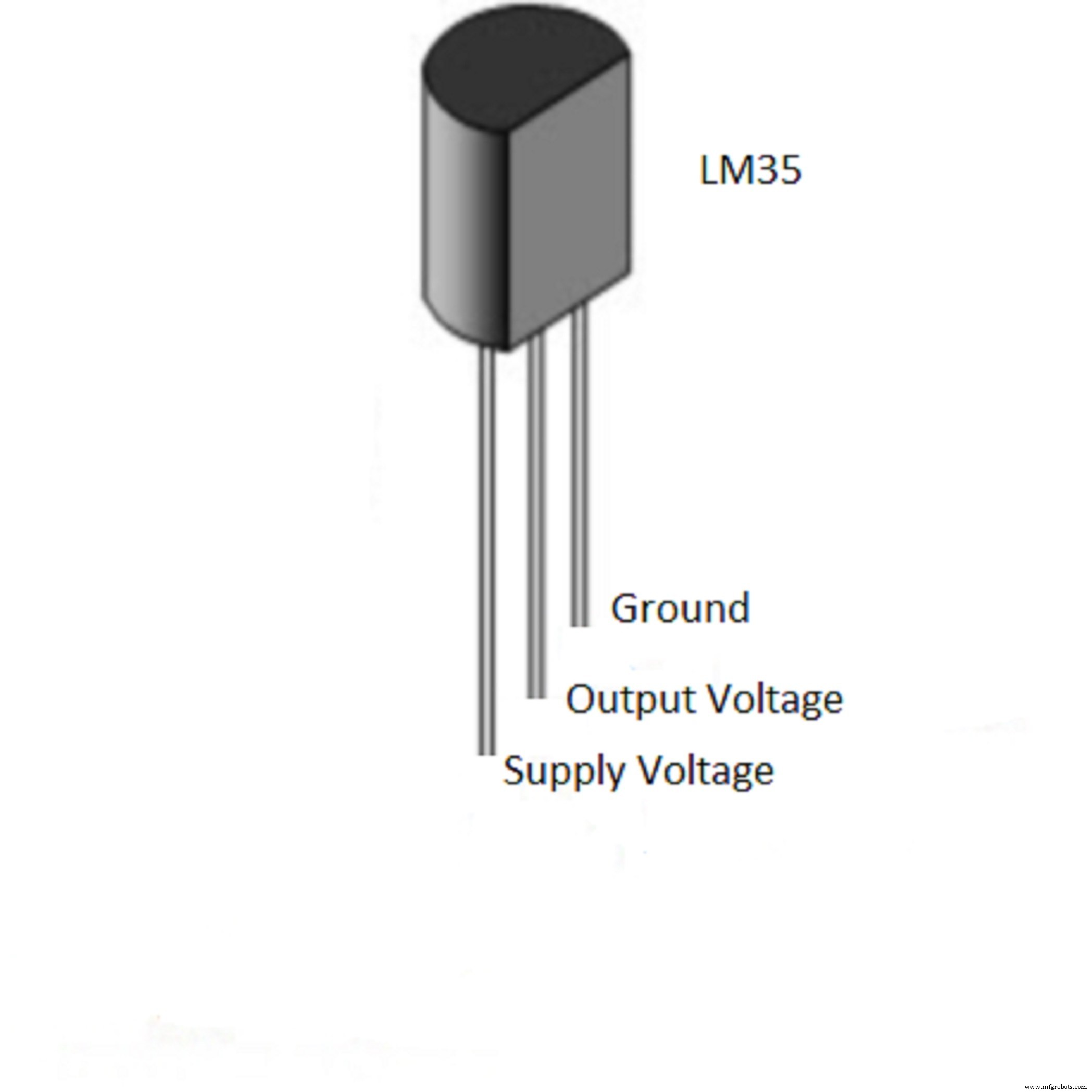
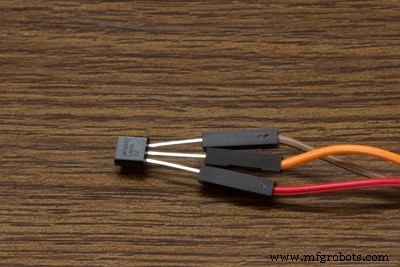
Étape 1 :Configuration du matériel
Tenez le capteur LM35 dans votre main de manière à ce que le nom vous soit visible. Les trois broches, de gauche à droite, sont VCC, sortie et GND. Connectez les trois broches aux fils femelle-mâle. Connectez les trois fils, correspondant aux trois broches de gauche à droite, aux broches 5 V, A0 et GND sur le module WiFi Bolt. Connectez le module WiFi à une source d'alimentation 5 V. Assurez-vous qu'il est connecté à une connexion Internet active.
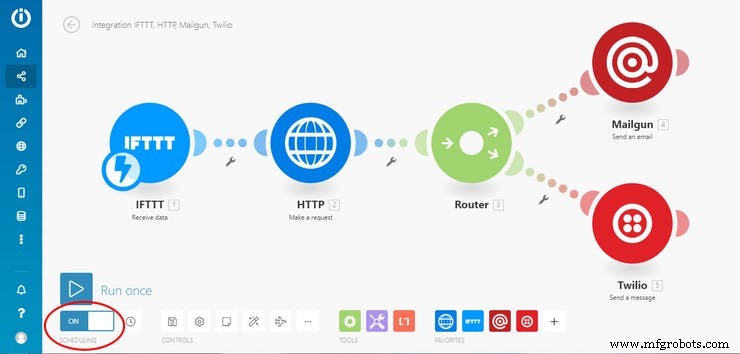
Étape 2 :Création d'un module IFTTT dans Integromat
Connectez-vous à votre compte Integromat. Si vous n'êtes pas inscrit sur Integromat, vous pouvez créer un compte en cliquant ici. Après vous être connecté, cliquez sur "Créer un nouveau scénario" en haut à droite de l'écran. Sélectionnez IFTTT, HTTP, Mailgun et Twilio dans l'écran pour sélectionner les outils requis, puis cliquez sur "Continuer". Cliquez ensuite sur le cercle blanc et sélectionnez IFTTT dans la liste, puis sélectionnez "Recevoir des données" dans le menu. Ce module est indispensable pour le connecter à l'applet sur IFTTT dont il sera question plus loin. Cliquez sur "Ajouter" pour ajouter un nouveau Webhook, puis donnez-lui un nom approprié et cliquez sur "Enregistrer". Maintenant, vous obtiendrez une URL ou un lien. Enregistrez-le pour une utilisation ultérieure.

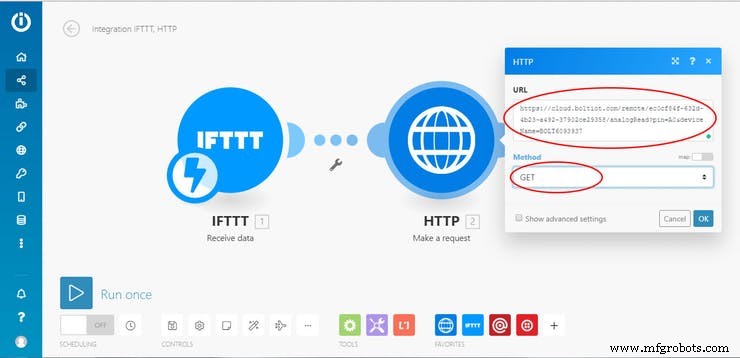
Etape 3 :Création d'un module HTTP dans Integromat
Ensuite, cliquez sur le symbole "+" attaché au module pour ajouter un nouveau module. Sélectionnez "HTTP" suivi de "Faire une demande". Ceci est nécessaire pour recevoir les valeurs du capteur du Bolt Iot Cloud. Dans l'URL, collez le lien https://cloud.boltiot.com/remote/your-bolt-iot-api-key/analogRead?pin=A0&deviceName=BOLTXXXXXXX. Remplacez « votre-bolt-iot-api-key » et « BOLTXXXXXXX » par vos informations d'identification respectives que vous pouvez facilement trouver dans votre Bolt Iot Cloud. Laissez la méthode être "GET" et cliquez sur "OK".
Le lien ci-dessus est utilisé pour récupérer les valeurs du capteur à partir de Bolt Iot Cloud. La sortie du lien ci-dessus sera sous la forme de {"value":"XXX", "success":"1"} où XXX sont les valeurs du capteur.
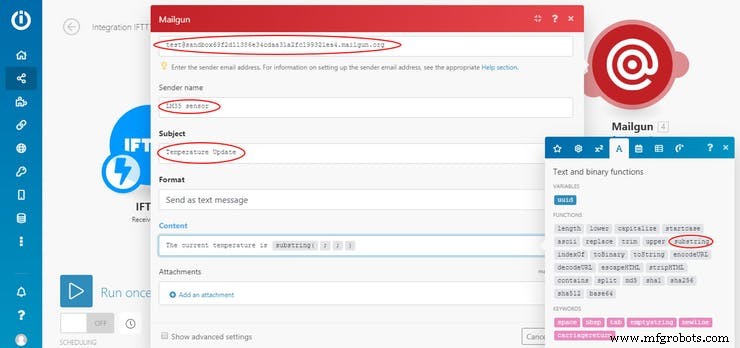
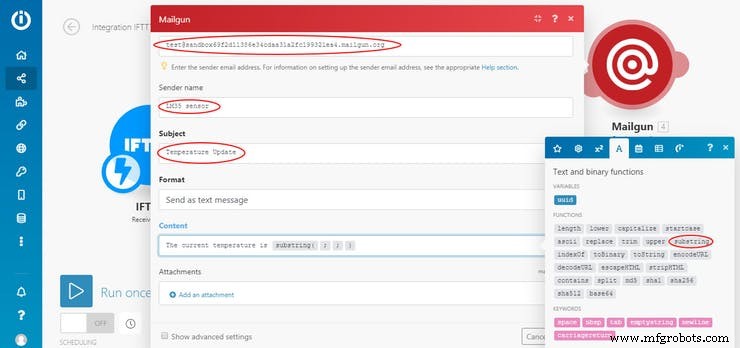
Etape 4 :Création d'un module Mailgun dans Integromat
Maintenant, cliquez à nouveau sur "+" et tapez "Flow Control" dans la zone de recherche et sélectionnez-le suivi de "Router". Deux cercles blancs doivent être faits. Cliquez sur le premier cercle blanc et sélectionnez "Mailgun" suivi de "Envoyer un e-mail". Ici, Mailgun est utilisé pour recevoir l'email avec la température. Si vous possédez déjà un compte dans Mailgun, vous devez disposer de la clé API et du nom de domaine qui peuvent être facilement trouvés dans votre compte Mailgun. Si vous n'avez pas de compte dans Mailgun, vous pouvez suivre l'étape alternative ci-dessous. Remplissez les détails requis comme demandé. Tapez l'e-mail du destinataire (qui est votre adresse e-mail). Dans le champ "Expéditeur", saisissez "test@votrenomdedomaine". Dans la section "Contenu", nous devons écrire la valeur de la température et non la valeur du capteur. Pour convertir la valeur de la température en valeur du capteur, nous devons diviser le nombre par 10,24. Pour obtenir la valeur du capteur sous la forme XXX, nous devons éliminer tous les autres caractères pour lesquels nous utilisons la fonction "sous-chaîne". Cliquez sur le symbole "A" dans la boîte de dialogue à côté et sélectionnez "sous-chaîne".
Dans le premier espace à l'intérieur des crochets, cliquez sur l'option « Données » sous le symbole étoile suivi de « 11 » et « 14 » dans le deuxième espace et le troisième espace. À proprement parler, ce n'est pas la bonne méthode pour récupérer la valeur du capteur, j'utilise donc un hack pour l'obtenir. Si quelqu'un connaît le bon chemin, il peut mentionner la méthode dans la section commentaire ci-dessous.
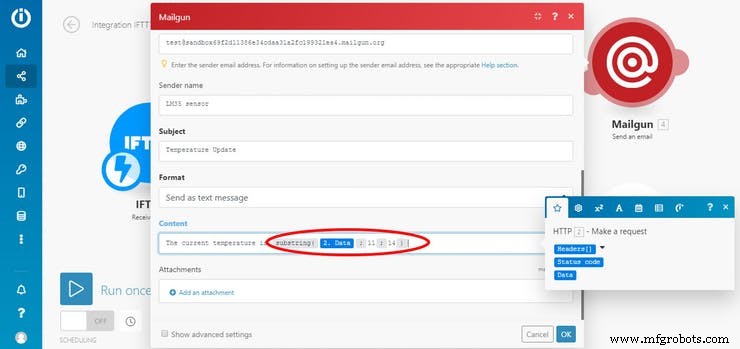
Ce dernier est fait pour capturer uniquement le "XXX" de la sortie. Ce nombre est ensuite divisé par 10,24

Avant d'enregistrer le scénario, n'oubliez pas d'activer le « Planification » qui se trouve en bas de l'écran et sélectionnez le « Exécuter le scénario » comme « Immédiatement ». Votre scénario final devrait ressembler à ceci.
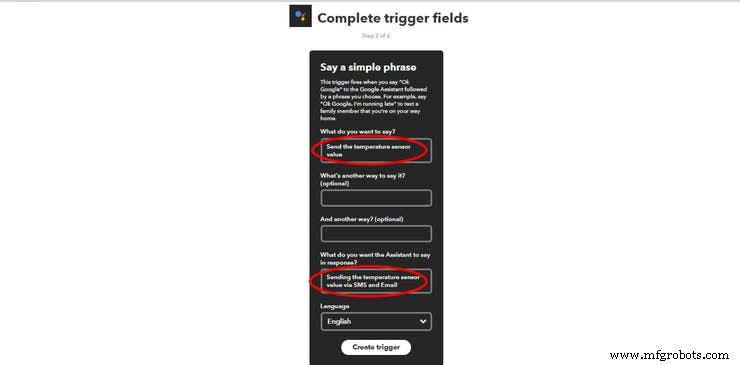
Étape 6 :Créer une nouvelle applet dans IFTTT
Connectez-vous à votre compte IFTTT. Si vous n'êtes pas inscrit sur IFTTT, vous pouvez créer un compte en cliquant ici. Après vous être connecté, cliquez sur « Nouvelle applet » dans la section « Mes applets ». Cliquez sur « + ceci » suivi de « Google Assistant » après l'avoir recherché dans le champ de recherche. Cliquez sur « Dire une phrase simple » dans l'écran suivant. Tapez la commande pour laquelle vous souhaitez déclencher l'action requise.
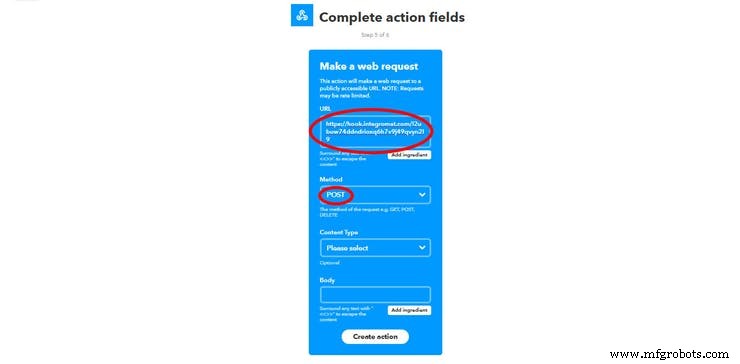
Cliquez sur « Trigger » suivi de « +that ». Search for "Webhooks" in the search box and select it followed by selecting "Make a web request" in the following screen. In the URL field, paste the link which we got in Step 2 after creating an IFTTT module in Integromat. This step is very essential to run the scenario in Integromat when you say the command to Google Assistant. Afterwards, select "POST" in method and click on "Create Action". Write a suitable name for the applet and select "Finish".
That's it. Now see the magic when you take out your mobile phone and say "Ok Google, send the temperature sensor value."
Schematics
Connecting female-to-male wires to LM35 sensor
Connecting female-to-male wires to the Bolt WiFi module
Final connection

THAT'S IT NOW UPLOAD EVERY THING AND THEN CHECK.
IF ANY DOUBTS CONTACT ME BY COMMENT SECTION.
THANK YOU....................................
Code
- FINAL RECEIVER
- FINAL TRANSMITER
FINAL RECEIVERArduino
#include#include #include #include #include #include Servo servo;RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int servo_pin =9;int sensor_pin=A0;int output_value;void setup() { Serial.begin(9600); radio.begin(); servo.attach (servo_pin ); radio.openReadingPipe(0, address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.startListening();}int pos;void loop() { if (radio.available()) { radio.read(&pos, sizeof(pos)); Serial.println(pos); if(pos==100) { digitalWrite(6,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite (3, LOW); // Serial.println("gk0"); } else if (pos==200){ digitalWrite(6,HIGH); digitalWrite(5,LOW); écriture numérique(4, ÉLEVÉ); digitalWrite (3, LOW); retard(10) ; // Serial.println("gk1"); } else if (pos==300){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,LOW); digitalWrite (3, HAUT); retard(10) ; // Serial.println("gk2"); } else if (pos==400){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); écriture numérique(4, ÉLEVÉ); digitalWrite (3, LOW); retard(10) ; // Serial.println("gk3"); } else if (pos==500){ digitalWrite(6,HIGH); digitalWrite(5,LOW ); digitalWrite(4,LOW); digitalWrite (3, HAUT); retard(10) ; // Serial.println("gk5"); } else if (pos==600){ servo.write(90); retard(10) ; // Serial.println("gk6"); } else if (pos==700){ servo.write(180); retard(10) ; // Serial.println("gk7"); } } else { Serial.println("connection lost"); } }
FINAL TRANSMITERArduino
#include#include #include #include #include RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int x_key =A1; int y_key =A0; int p_key =A3; int q_key =A2; int x_pos;int y_pos;int p_pos;int q_pos;void setup() { radio.begin(); radio.openWritingPipe(address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.stopListening(); Serial.begin(9600); pinMode (x_key, INPUT); pinMode (y_key, INPUT); pinMode (p_key, INPUT); pinMode (q_key, INPUT); }int pos;void loop() { x_pos =analogRead (x_key); y_pos =analogRead (y_key); p_pos =analogRead (p_key); q_pos =analogRead (q_key); Serial.println(x_pos); Serial.println(y_pos); Serial.println(p_pos); Serial.println(q_pos); if (p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600) { if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600) { pos=100; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos<400) { pos=200; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos>600) { pos=300; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos<400) { pos=400; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos>600) { pos=500; radio.write(&pos, sizeof(pos)); } Serial.println(pos); delay(100);}else if(p_pos<400 || p_pos>600){ if(p_pos<400) { pos=600; radio.write(&pos, sizeof(pos)); } if(p_pos>600) { pos=700; radio.write(&pos, sizeof(pos)); } delay(100);}}
Schémas
Processus de fabrication