


Contrôleur de niveau d'eau entièrement automatique utilisant SRF04
Contrôleur de niveau d'eau entièrement automatique utilisant SRF04, L293D et PIC16F84A
Introduction au contrôleur automatique de niveau d'eau
Surveillance et contrôle du niveau d'eau dans les réservoirs d'eau est l'un des travaux les plus importants dans presque de nombreuses zones résidentielles et commerciales. Dans la plupart des cas, notamment dans les bâtiments résidentiels, du fait de l'indisponibilité de tout moyen automatique, il devient fastidieux et incommode de surveiller fréquemment le niveau d'eau dans les réservoirs. En fait, pour les endroits où l'eau est rare, un débordement d'eau serait assez coûteux à payer.
La seule solution au problème ci-dessus est d'avoir un moyen automatique de surveiller et de contrôler le niveau d'eau. Bien qu'il existe de nombreuses techniques telles que l'utilisation de capteurs de distance, l'utilisation de sondes de courant, l'utilisation d'un ranger à ultrasons, etc., nous allons ici nous concentrer sur l'utilisation d'un ranger à ultrasons.

- Projet connexe : Circuit d'alarme de pluie - Projet de détecteur de neige, d'eau et de pluie
Présentation du système de contrôleur de niveau d'eau
Le système se compose d'un capteur de distance à ultrasons placé sur le dessus du réservoir de sorte qu'une fois déclenché, il envoie un signal ultrasonique. L'eau présente dans le réservoir se refléterait sur le signal. Le capteur recevrait ce signal et le temps pris entre ces deux signaux donnerait une estimation de la distance parcourue par les signaux, donc le niveau d'eau à partir du haut.
Ici, un microcontrôleur est utilisé pour envoyer un signal de déclenchement au garde ultrasonique. Une fois qu'un écho est reçu, le décalage temporel entre les deux impulsions est calculé et celui-ci est directement proportionnel au niveau d'eau. Le décalage temporel est calculé à l'aide de la minuterie, dont le nombre d'impulsions de comptage indique la distance parcourue par le signal ou le niveau d'eau.
Étant donné qu'ici le garde forestier est placé au-dessus du réservoir, le contrôle du débit d'eau se fait en tenant compte du niveau d'eau du haut du réservoir. Par exemple, si la plage mesurée se situe entre 0 et 1 cm, le réservoir déborde et le microcontrôleur envoie un signal de commande pour faire tourner le moteur en sens inverse, afin d'éliminer l'excès d'eau. ‘
Si la distance est comprise entre 2 et 5 cm, le réservoir est plein et le microcontrôleur envoie un signal de commande pour éteindre le moteur. Si la plage est supérieure à 5 cm, le réservoir est presque vide et le microcontrôleur envoie un signal de commande pour faire tourner le moteur vers l'avant.
Schéma de circuit du contrôleur automatique de niveau d'eau
Cliquez sur l'image pour l'agrandir
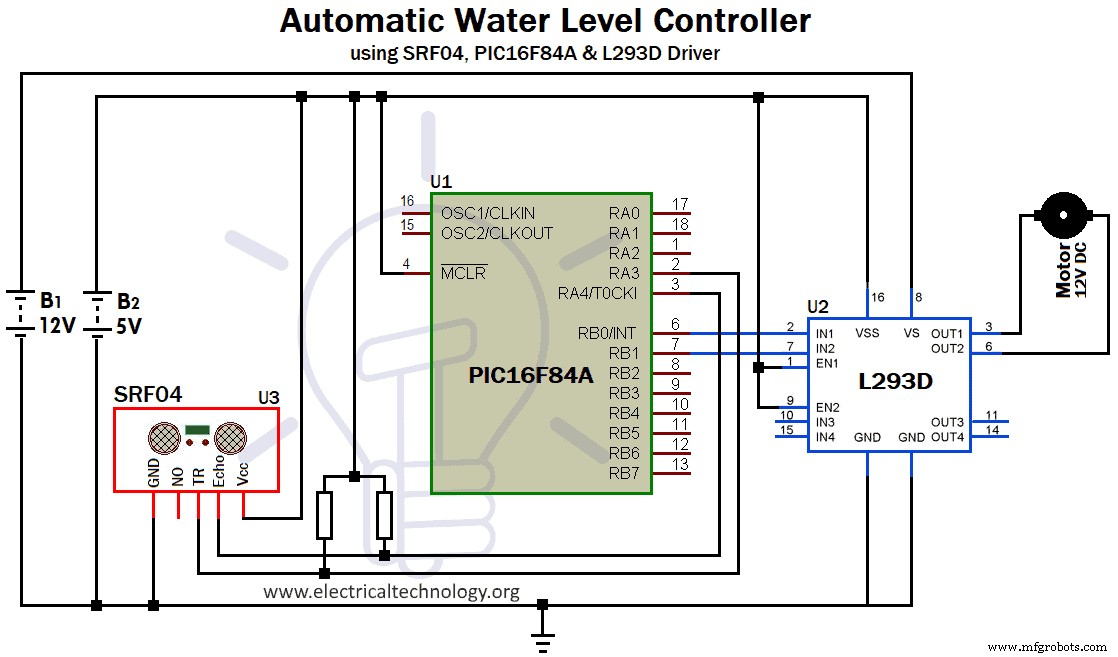
Figure 1 :Contrôleur de niveau d'eau
Description des pièces
Les composants suivants seraient utilisés pour concevoir le circuit.
- Télémètre à ultrasons SRF04
- Microcontrôleur PIC PIC16F84A
- Driver moteur L293D
- Moteur CC
- Deux résistances 1K
Laissez-nous avoir une brève idée de chaque composant
Télémètre à ultrasons SRF04 :
Le SRF04 est un ranger à ultrasons de haute qualité qui est utilisé dans de nombreuses applications robotiques pour une détection facile des obstacles. Il nécessite un signal de 10 microsecondes pour être déclenché. 
Figure 2 :Télémètre à ultrasons SRF04
Une fois déclenché, il envoie 8 impulsions d'ultrasons, à une fréquence de 40 kHz et envoie simultanément sa ligne d'écho à HIGH. Une fois qu'il reçoit le signal réfléchi ou l'écho, il abaisse la ligne d'écho à BAS.
Ainsi, la largeur de l'impulsion d'écho indique la distance parcourue par le signal ou, en d'autres termes, la distance entre le ranger et l'objet. La raie d'écho est donc une impulsion dont la largeur est proportionnelle à la distance à l'objet. Pour 1 cm, la largeur d'impulsion d'écho serait de 58 microsecondes. 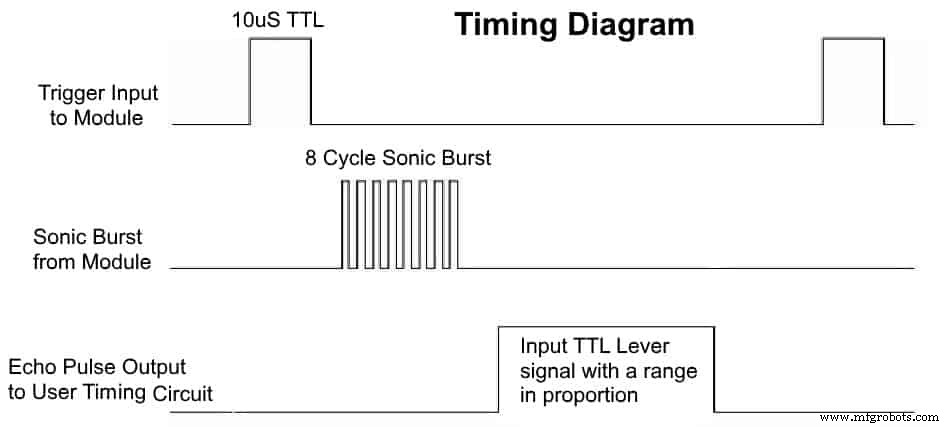
Figure 3 :Diagramme de synchronisation SRF04
Microcontrôleur PIC PIC16F84A :
Figure 4 :Microcontrôleur PIC PIC16F84A
Il s'agit d'un microcontrôleur Flash compatible CMOS, 8 bits, 18 broches avec une seule minuterie 8 bits (avec pré-échelleur programmable 8 bits). Le fonctionnement de la minuterie est contrôlé à l'aide des registres suivants - OPTION_REG, TMR0 et INTCON. L'OPTION_REG est un registre 8 bits dont le 5 ème bit (T0CS) sélectionne l'opération de temporisation ou de compteur requise.
L'activation du bit sélectionne le fonctionnement du compteur, tandis que son effacement sélectionne le fonctionnement de la minuterie. TMR0 est le registre du temporisateur, alors que INTCON est le registre d'interruption dont le 5
ème
Le bit (T0IE) désigne le drapeau du temporisateur, c'est-à-dire qu'il est activé lorsque le temporisateur déborde. 
Pilote de moteur L293D :
Figure 5 :Circuit intégré de commande de moteur L293D
Il s'agit d'un circuit intégré de commande de moteur à courant continu à pont en H à 16 broches. Il a la capacité d'entraîner deux moteurs et dans les deux sens. Il se compose de deux broches d'activation (Pin1 et 9) qui, lorsqu'elles sont réglées sur HIGH, activent le fonctionnement du CI. Il agit essentiellement comme une interface entre le microcontrôleur et le moteur à courant continu. Il se compose de quatre broches d'entrée - deux pour chaque circuit en pont en H. Vous trouverez ci-dessous un tableau indiquant la commande du moteur. 
| IN1 (broche 2) | IN2 (broche 7) | EN1 (Broche 1) | Fonctionnement du moteur |
| ÉLEVÉ | ÉLEVÉ | ÉLEVÉ | OFF |
| BAS | BAS | ÉLEVÉ | OFF |
| ÉLEVÉ | BAS | ÉLEVÉ | ON (dans le sens des aiguilles d'une montre) |
| BAS | ÉLEVÉ | ÉLEVÉ | ON (dans le sens inverse des aiguilles d'une montre) |
| X | X | BAS | OFF |
Remarque :étant donné que le SRF04 est un appareil compatible TTL et que le PIC16F84A est compatible CMOS, nous utilisons une résistance de rappel de valeur 1K, pour compenser le changement de niveau de tension.
Fonctionnement et fonctionnement du contrôleur automatique de niveau d'eau
Le programme est écrit de telle sorte qu'une impulsion de 10 microsecondes est envoyée par le microcontrôleur pour déclencher le détecteur à ultrasons. Ceci est écrit en utilisant une fonction de retard. Le registre de temporisateur, TMR0 est chargé avec la valeur décimale 200, de sorte qu'il fait 55 comptes.
La sortie de SRF04, le signal d'écho est reçu à la broche RA4 (la broche d'horloge de la minuterie, fournissant ainsi une impulsion d'horloge externe à la minuterie). Une fois que le signal d'écho fait une transition de HAUT à BAS, la minuterie est activée. Pendant que le temporisateur compte, le bit d'indicateur d'interruption, T0IE, est surveillé. Une fois réglée, la minuterie est désactivée.
La procédure est répétée pour une autre impulsion d'écho et ainsi de suite. Le nombre de fois que le temporisateur fonctionne est calculé et cela indique le nombre d'impulsions d'écho. Comme chaque impulsion d'écho est de 58 microsecondes, cela représente 1 cm. Ainsi, 5 impulsions d'écho correspondraient à 5 cm. La valeur de ce comptage, stockée dans un nombre entier, est utilisée pour contrôler le moteur à courant continu.
Si la valeur est comprise entre 2 et 5, le microcontrôleur envoie des signaux HIGH aux broches RB0 et RB1 (connectées respectivement à IN1 et IN2 de L293D), pour éteindre le moteur. Si la valeur est comprise entre 5 et 20, le microcontrôleur envoie un signal HIGH à IN1 et un signal LOW à IN2, pour allumer le moteur et le faire tourner dans le sens des aiguilles d'une montre. Si la valeur est comprise entre 0 et 1, le microcontrôleur envoie un signal BAS à IN1 et un signal HAUT à IN2, pour allumer le moteur et le faire tourner dans le sens inverse des aiguilles d'une montre.
Avantages du contrôleur automatique de niveau d'eau utilisant SRF04
- Ce serait un système simple et pratique.
- Ce serait un système à faible coût en raison de l'utilisation de composants à faible coût.
- L'utilisation d'une technique automatique éliminerait les obstacles rencontrés dans le contrôle du niveau d'eau à l'aide de moyens manuels.
- Étant donné qu'aucune pièce mécanique n'est utilisée, cela éliminerait le risque d'usure mécanique ou de corrosion.
Inconvénients du contrôleur automatique du niveau d'eau
- Le télémètre à ultrasons, SRF04, serait soumis à un amortissement dû à l'utilisation de nombreux composants électroniques et devrait donc être correctement isolé.
- Ce système est conçu de telle sorte que le capteur ainsi que l'actionneur doivent être placés à proximité l'un de l'autre. En termes simples, ce système de contrôle est destiné aux endroits où le réservoir d'eau est proche de la pompe à eau. Ainsi, pour de nombreux bâtiments où des pompes submersibles sont utilisées et des réservoirs d'eau sont sur les toits, ce système de contrôleur automatique de niveau d'eau Ne peut pas être utilisé. Cependant, cela peut être modifié en utilisant un circuit de communication.
Technologie industrielle
- Utilisation de technologies sans eau dans le processus de teinture
- 4 avantages de l'utilisation d'une solution intelligente de détection de fuites dans les bâtiments
- 5 avantages de l'utilisation du système de détection de fuites d'eau alimenté par l'IdO de Biz4intellias dans les industries
- Surveillance et contrôle intelligents du niveau d'eau pour une gestion efficace de l'eau
- 7 avantages de l'utilisation de la solution de surveillance de niveau intelligente de Biz4Intellia
- Utilisation d'un système de surveillance du niveau de la rivière alimenté par l'IdO pour une gestion efficace de l'eau
- Le polyuréthane est-il étanche ?
- Nomenclature manuelle ou automatique
- 7 avantages d'une cuisine entièrement/semi-automatique pour les cuisines cloud